
Трикоптер своими руками
Добавил пользователь Валентин П. Обновлено: 19.09.2024

Программирование осуществлялось на языке/диалекте Wiring-C++ в среде Arduino. Первым делом надо было просто заставить коптер полететь, поэтому алгоритмы обработки датчиков и управления предельно простые.
В этом проекте использованы три гироскопа MLX90609 , они имеют аналоговые выходы для данных о угловой скорости и встроенный температурный датчик для устранения дрифта. Микроконтроллер получает от гироскопа значения в диапазоне 0-1024, затем с учетом чувствительности 300 градусов в секунду производит расчет угловой скорости. Кроме того вычитается байес - значение которое показывает сенсор при отсутствии вращения. Таким образом окончательная формула выглядит так:
Использование оверсэмплинга, то есть многократного повторного чтения входа, позволяет увеличить разрешение на бит.
На данном этапе, управление аппаратом организовано посредством задания угловой скорости вокруг каждой оси с пульта управления. Данные о положении джойстиков кодируются и передаются на приемник, находящийся на коптере. Микроконтроллер получает информацию с приемника и приводит ее к формату удобному для вычисления.

Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для формирования управляющего сигнала. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально входному сигналу, второе — интеграл входного сигнала, третье — производная входного сигнала. Подробнее.
В каноническом виде уравнение ПИД-регулятора выглядит так:
После отладки алгоритма и тестовых полетов, рама коптера пришла в полную негодность, появились трещины и люфты. Для продолжения работы понадобился новый трикоптер. Версия 1.1 почти в два раза больше первой, лучи подросли до 30см, увеличилась и площадка под электронику .Новые шасси должны хорошо аммортизировать жесткие посадки и обеспечивать более стабильный взлет. Электроника осталась прежней.

Подписываемся на VK
YouTube канал


Подбор двигателя
Меню сайта
Магазин
TOP статьи

Оборудование
Плосколеты
Создание авиамоделей
- Фотоинструкции
- Видеоинструкции
- Обзоры изготовления
RC Магазины







Home Три и квадрокоптеры Поворотный механизм для трикоптера из легкодоступных деталей.
- Как сделать Mini Flash
- Сокол (Falcon) 1000 - 2-х моторное пилотажное FPV крыло.
- Мини самолеты на радиоуправлении
- Дрон для новичка - Eachine Novice-II V2.0
- Как сделать самолет УТ-2 своими руками
- Бюджетный джип внедорожник - JY66 1/14 2.4Ghz 4WD
- Большие Гуси 2021
- Обзор радиоуправляемого джипа WPL C24 масштаба 1/16
- Самодельный токарный станок для домашней мастерской
- DW HOBBY Rainbow - летающее крыло из ЕПП








Всем доброго времени суток.
Все началось с задумки построить трикоптер, понравился он мне своей простотой и отсутствие дефицитных и часто ломающихся деталях при краше.
Заказал электронику для версии TricopterV1.5 .
Двигатели- 2213N 800Kv Brushless Motor ( Хоббисити Паркфлаер ) - 3шт.
Гироскопы- Hobby King 401B AVCS Digital Head Lock Gyro ( Хоббисити Паркфлаер ) - 4шт.
Пропсейверы- Prop Saver w/ Band 3mm (10pcs) ( Хоббисити , Паркфлаер ) взял пачку, 10шт.
Сервомашинка на поворотный узел- HK15178 Analog Servo 10g / 1.4kg / 0.09s ( Хоббисити Паркфлаер ) 1шт., эти сервомашинки я взял на пробу, предназначались они не для использования в трикоптере, но потом решил попробовать, как оказалось, со своими функциями они справляются.
Пока посылка едет, решил заняться рамой, для первого своего трикоптера я решил делать раму из 4-х миллиметровой фанеры и реек 10х10мм., закупил крепеж, и начал собирать.
Постройка шла довольно быстро, но тут подошла очередь поворотного механизма…
Попробовал несколько вариантов, но все они оказались огородными и трудоемкими в изготовлении…
Отложив затею на вечер, и хорошо подумав, пришел к такому варианту:






Очень жаль, что механизм уже склеен, и возможности для фотографии всех деталей нет, но имеется простенький эскиз, для наглядности работы механизма.

Поворотный механизм состоит из деталей, которые можно приобрести в любом строительном магазине, правда за одним крепежом, может, придется все-таки побегать, вот за этим

Вот перечень всех деталей, которые необходимы для сборки поворотного механизма:
Квадратный трубчатый профиль из алюминия 10х10, толщина стенки 1мм.
Мебельная гайка М5 - 2шт.
Гайка М3- 2шт. (для крепления двигателя)
Шайба 6х3 – 2шт. (для крепления двигателя)
Из чертежа принцип работы поворотного механизма ясен, по сборке тоже серьезных проблем не возникнет. Если будут вопросы, то я с радостью отвечу.
Механизм склеен термоклеем. Кабанчик сделан из пластика от коробов для прокладки электропроводки. Мебельную гайку укорачиваю до 6 мм., что бы не выглядывала из фанеры, и можно было нормально ее запрессовать. Гайки, которые стоЯт внутри алюминиевого профиля надо подточить, так, чтобы они вошли с натягом. Гайку на осевой болт можно самоконтрящуюся, у меня стоИт обычная, поэтому фиксировал термоклеем. Осевой болт смазан машинным маслом.
Нареканий на работу поворотного механизма нет.
Механизм испытан на трикоптере в полевых условиях, вот парочка видео его работы.
Конструкция этого летательного аппарата была вдохновлена трейлером фантастического фильма Oblivion. В воздух его поднимают три воздушных винта с управляемым с помощью сервоприводов вектором тяги, что обеспечивает отличную маневренность.

Поставщик Apple Foxconn продлил закрытие завода в Индии…
Похоже что проблемы Foxconn, крупного поставщика Apple, до сих пор не решились, поскольку он продлевает з…
Samsung MX: новое название мобильного подразделения южнокоре…
Ранее Samsung объявила о своих планах объединить подразделение мобильной связи с подразделением бытовой э…
Биткойн упал более чем на 9 процентов…
Биткойн упал более чем на девять процентов в пятницу, потянув за собой более мелкие токены после того, ка…
Apple стала самым дорогим брендом в мире…
Новый отчет показал, что Apple удалось стать самым дорогим брендом в мире к 2022 году. Между тем, ее конк…
Alphabet запускает компанию с искусственным интеллектом для …
Материнская компания Google объявила в четверг, что новая компания Alphabet будет использовать методы иск…
SK hynix объединяется с Intel NAND и SSD…
Сегодня SK hynix Inc. объявила о получении разрешения антимонопольного органа Китая на приобретение бизне…
Samsung стремится сделать бытовую технику более экологичной…
Компания Samsung объявила, что стремится сделать свою бытовую технику более экологичной, включая технолог…
В Китае преднамеренно срезают кабеля со станций Tesla Superc…
Согласно отчету, станции Supercharger американского производителя Tesla были замечены без зарядных кабеле…

Всем привет! После выхода первого же ролика, снятого с собранного мной гексакоптера, народ стал одолевать вопросами и просьбами помочь в постройке аппарата.
В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать.

Хочу в своей статье ответить на те вопросы, которые поступают практически каждый день от моих знакомых.
А именно:
— Какой коптер лучше и чем они отличаются? (квадро-, три-, гекса-, октакоптер)
— Купить готовый, или собрать самому?
— Какие комплектующие подобрать? Как рассчитывать? Каков минимальный набор для полёта?
— На что снимать – на GoPro или камеру потяжелее?
Думаю, что для начала этих вопросов хватит, чтобы заставить закипеть мозг тех, в чьих головах пока есть только желание разобраться с основами, но нет опыта за плечами.

Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки.
Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
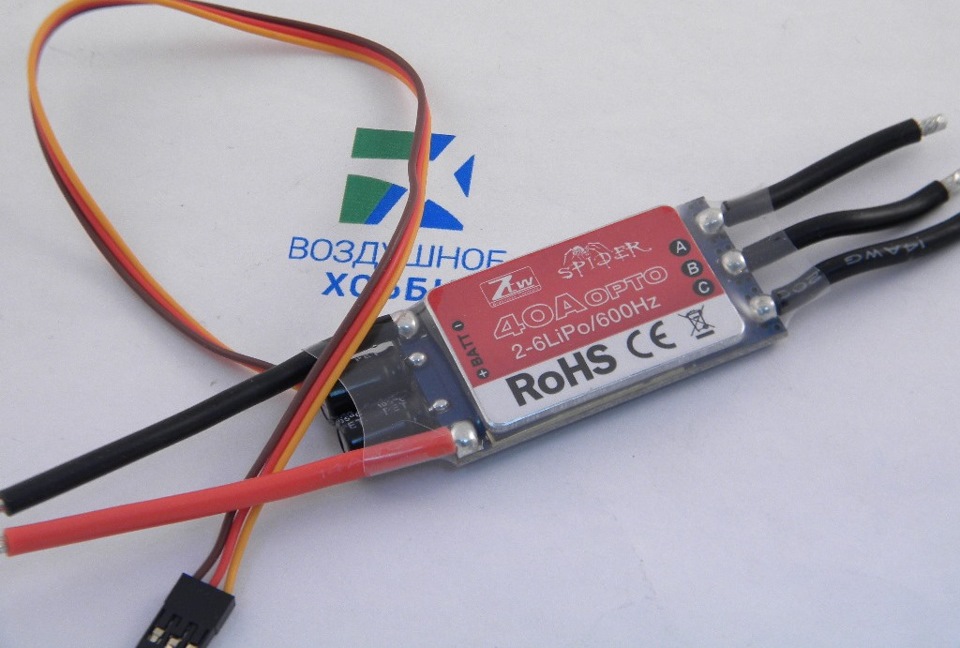
Также на борту стоит приемник сигналов управления, который передает их в ПК.

Современные полётные контроллеры такие, как распространенный DJI Naza-m v2 представляют собой целые наборы.

Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели.
1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить.
2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580
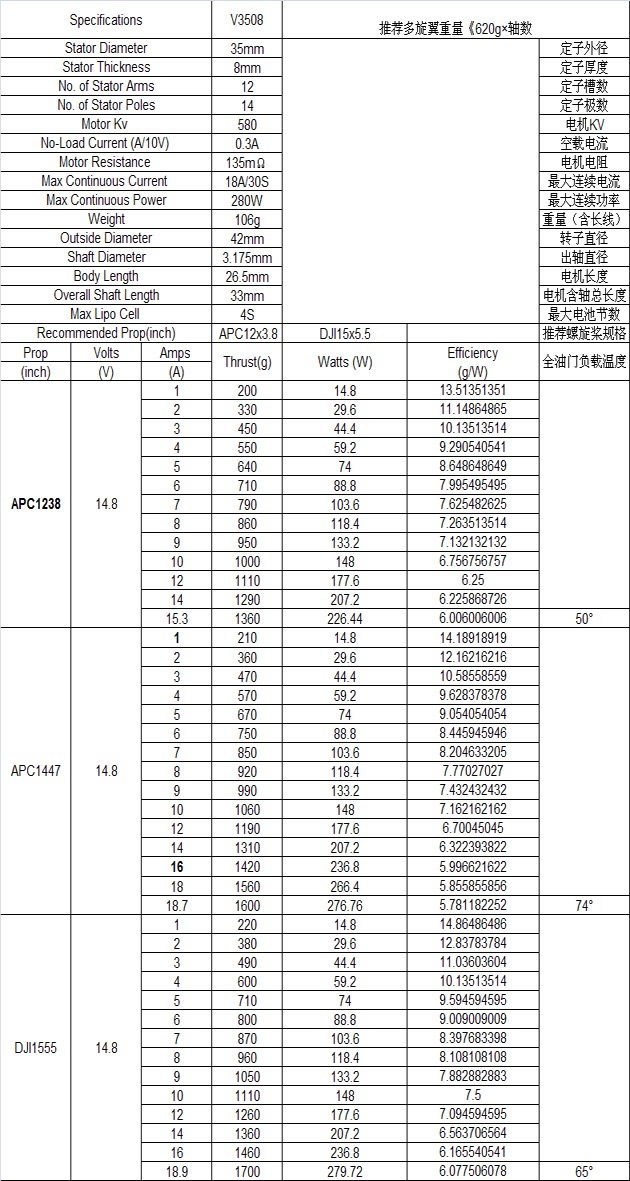
И тут хочу акцентировать внимание на параметры мотора. В названии мотора зашифрованы его основные параметры V3508 kv580, где v — это серия, 35мм — диаметр статора, 8 мм — это длина статора. А параметр KV говорит об оптимальных для данного мотора оборотах висения летательного аппарата. То есть, имея оптимальные обороты висения и вес аппарата, нам придется под них подбирать пропеллеры с нужными параметрами, чтобы добиться оптимальных показателей. В таблице видно, что для данных моторов производителем рекомендуются 3 вида пропеллеров: 1238, 1447 и 1555. Во втором столбце видим, что везде значение напряжения стоит 14.8 вольт. То есть данные моторы используются только с 4S батареями. Для одних и тех же моторов в таблице могут даваться показания для разного вольтажа, и нужно быть очень внимательным, ведь моторы, которые работают и с 11.1 вольтовыми 3S батареями и с 14.8 вольтовыми 4S батареями, как правило, допускают максимальный размер пропеллеров при 3S батареях меньше, чем при 4S, так как мотору может просто не хватить мощности раскручивать тяжелые для него пропеллеры, и есть вероятность перевернуть коптер вверх ногами прямо в полёте. (Со мной такое случалось). Вот пример таблицы для моторов SunnySky 2216 kv800
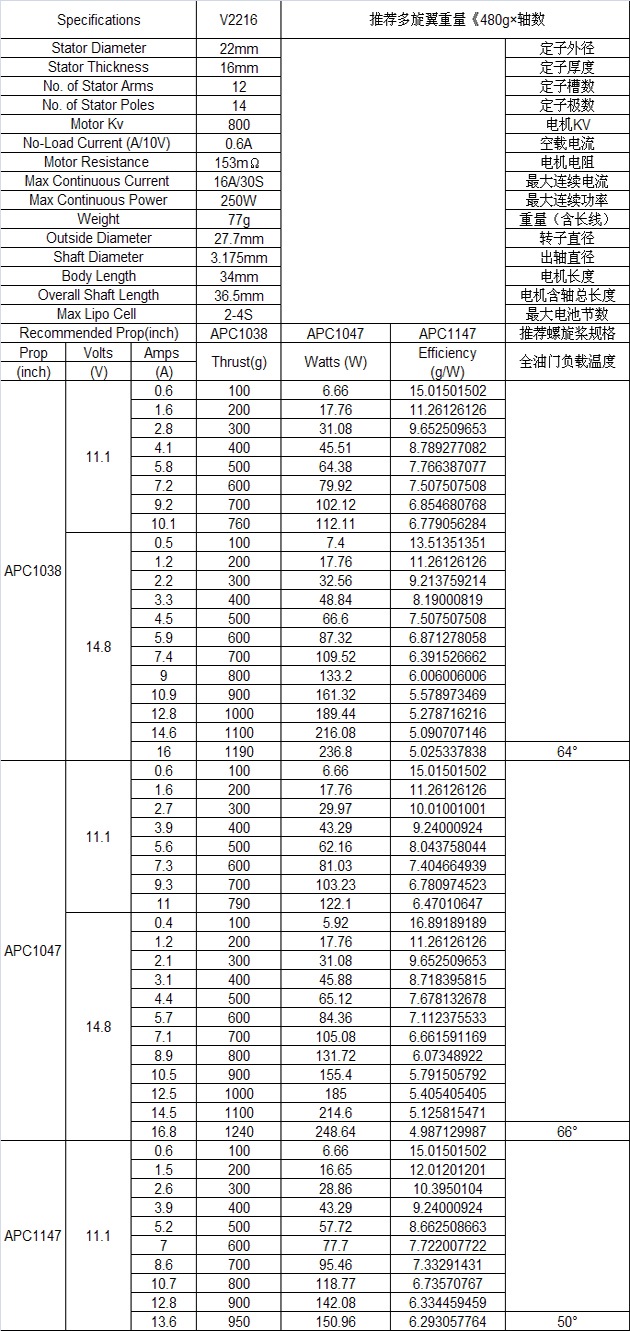
Из этой таблицы видно, что с моторами 2216 при использовании 11.1 вольтовых батарей можно ставить пропеллеры максимального размера 1147, а при 14.8 вольтовых максимум 1047-е пропеллеры. Теперь, чтобы сложить картину воедино, следует пояснить маркировку пропеллеров. На самом деле, размер обозначает только первое двузначное число, а второе означает шаг. Размеры даются в дюймах. Маркировка 1047 означает, что пропеллеры 10-тидюймовые, а шаг на один оборот составляет 4,7 дюйма.
Выше я уже привел ссылку на видео случая из моей первой конфигурации, когда я на моторы 2216 kv800 установил пропеллеры 1238. На видео с 17й секунды видно, что при снижении, либо порыве ветра аппарат начинает амплитудно раскачиваться. Закончилось это тем, что коптер перевернулся в воздухе и приземлился вверх ногами на асфальт. Во-первых, моторы перегреваются и могут вообще перегореть в полёте, во-вторых, у них банально не хватает силы резко раскручивать нужные пропеллеры для стабилизации положения коптера, в итоге аппарат себя раскачивает все сильнее и сильнее.
Также, прежде чем перейти к этапу расчетов, важно пополнить свои знания информацией о литий-полимерных батареях. Они встречаются сейчас повсеместно — в телефонах, планшетных компьютерах, ноутбуках и других устройствах. Эти батареи имеют максимальную ёмкость относительно веса и максимальную токоотдачу, минимальное время заряда. Но при этом батареи токсичны и даже взрывоопасны.
Они непременно взрываются при сильном механическом повреждении, при чрезмерном перезаряде, при замыкании. Эту информацию важно знать и тем, кто не планирует собирать себе коптер.
Li-Po батареи нужно заряжать, транспортировать и хранить в специальных огнеупорных конвертах.

Теперь давайте разберем параметры в описании батареи.

К примеру :
ONBO 5200mAh 4S 45C Lipo Pack:
• Емкость: 5200mAh
• Напряжение: 4S1P / 4 Cell / 14.8V
• Ток разряда: 45C продолжительный / 90C пиковый
• Вес: 485г (включая провода, разъемы и корпус)
• Размеры: 160x50x32мм
• Балансировочный разъем: JST-XH
• Силовой разъем: T-connector

Подобный индикатор настраивается на определенный уровень напряжения, по достижении которого на любой из ячеек он начинает сигнализировать громким писком. Это очень удобно, если отправлять аппарат в полёт с подключенным устройством, которое настроено на 3,4 вольта. Чтобы знать, что пора приземлять коптер. Ведь важно знать, что порог, до которого можно разряжать Li-Po аккумулятор, чтобы он прослужил долгое время, составляет 3.3 вольта на банку. При полной разрядке аккумулятора, он теряет значительную часть своей ёмкости.
А для правильной его зарядки требуется специальное зарядное устройство, которое умеет балансировать ячейки до равного напряжения и при этом не перезаряжать, чтобы не допустить возгорания.

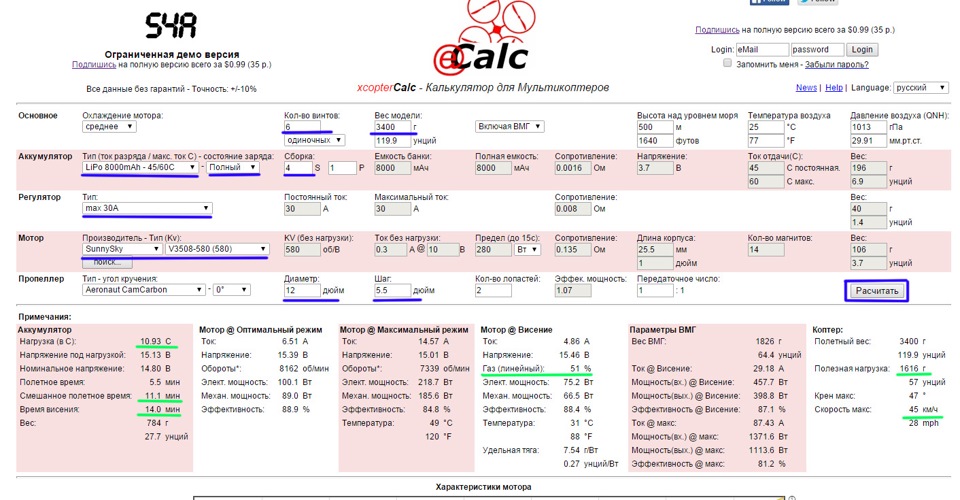
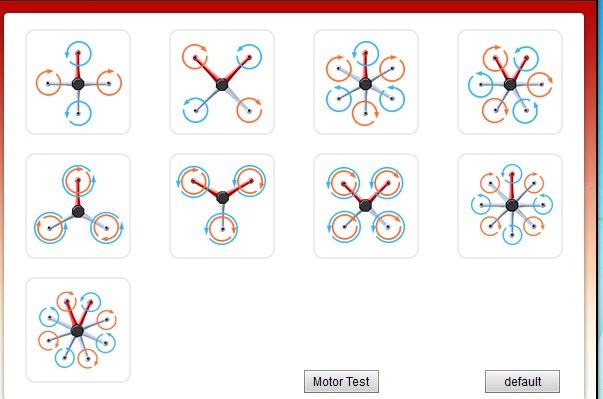
Синим я пометил параметры, которые менял в таблице с параметров по умолчанию после загрузки страницы, а зеленым – наиболее важные строки, на которые стоит обращать особое внимание при расчетах. Как видно, газ висения подобран практически идеально. Для полётного контроллера naza желательно подбирать значения в пределах от 40% до 60%. Газ висения не означает, что если вы оставите стик газа на управлении ровно посередине, мультикоптер начнет подниматься при переизбытке тяги, или опускаться при её недостатке. Нет, на самом деле полётный контроллер сам регулирует обороты двигателя, для того, чтобы оставаться на заданной высоте при положении стика газа ровно посередине. Но если газ висения будет более 60%, значит аппарат перегружен, нужно пробовать пропеллеры с большим шагом, либо большего размера (если это позволяет рама и характеристики двигателей).
Для примера я посчитал эту же конфигурацию, если установить пропеллеры 1447.
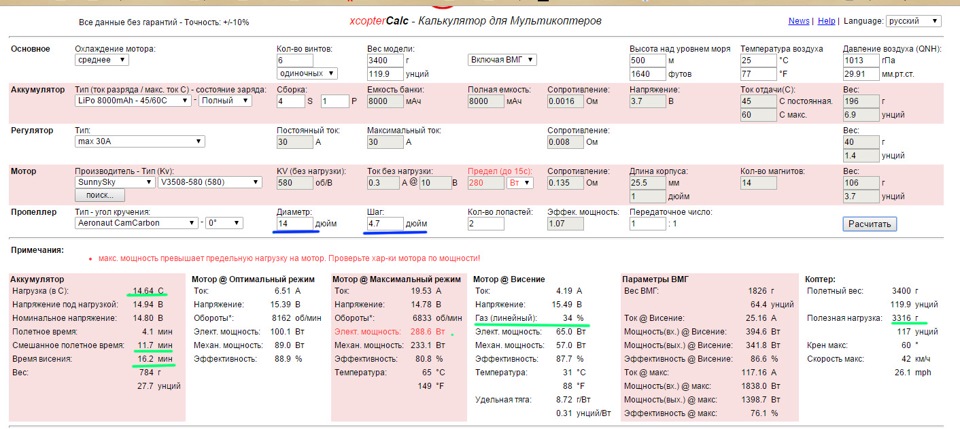
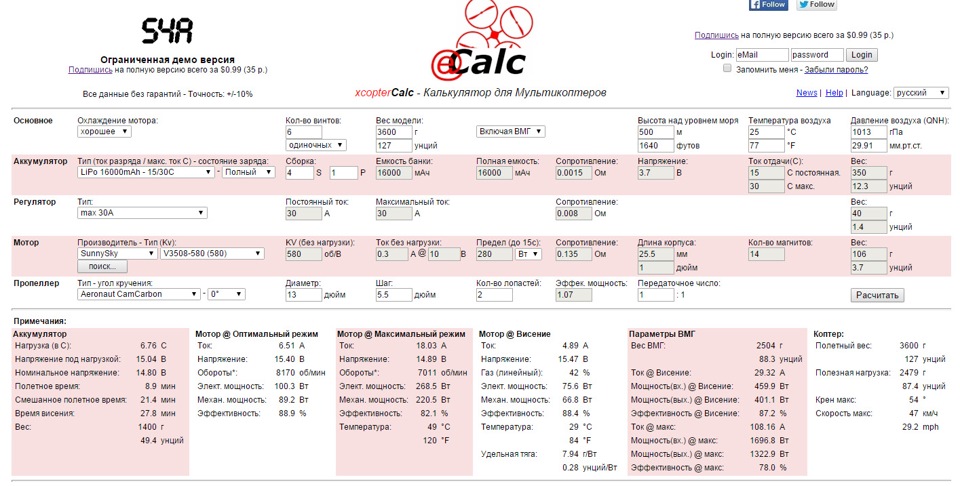
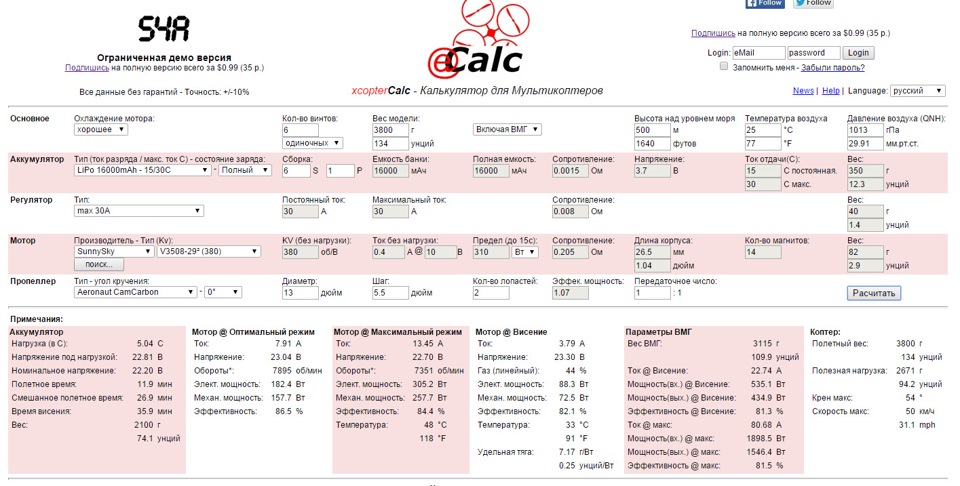
Видим, что совсем незначительное увеличение времени полёта ощутимо сказалось на нагрузке аккумулятора, которая возросла с 11 до 15С и нагрузке на мотор. В максимальном режиме даже выводится предупреждение о превышении допустимой нагрузки. Но при этом полезная нагрузка возросла почти вдвое, а газ висения снизился до 34%, то есть образовался небольшой избыток тяги. Такая конфигурация подошла бы, если бы я захотел повесить на свой коптер не GoPro, а камеру типа Panasonic GH4K или sony nex. Но тогда время полёта ощутимо сократится, ведь возрастет вес. Для полётов с такими камерами я приведу расчет в самом конце, а пока привожу пример, если на такой-же конфигурации использовать батарею большой ёмкости – 16000 mah. Её вес 1 кг (10С), она относительно недорогая – на сегодняшний день можно купить ее за 7300 руб с доставкой по РФ. Но и пропеллеры в расчетах уже ставлю не 1255, а 1355, так как возрастет вес аппарата.

Надеюсь, что моя статья будет для вас полезной. К вопросу о покупке деталей и запчастей для сборки, я пользуюсь известными всем иностранными торговыми площадками ebay и aliexpress, hbbyking и подобными.
Когда речь заходит об летающих радиоуправляемых моделях, первое, что приходит в голову – это крупные мультикоптеры с видеокамерами или ширококрылые самолеты, парящие в небе.
Конструкция дрона с тремя лучами – трикоптера – считается нетрадиционным решением и ассоциируется с дешевыми детскими игрушками. И совершенно, зря.

Особенности конструкции
Трикоптеры с шестью пропеллерами отличаются более плавным и стабильным полетом.

Трикоптер – это, по сути, гибрид самолета и вертолета. С одной стороны – он мгновенно разгоняется в воздухе и выполняет фигуры высшего пилотажа, а с другой – может зависать на одном месте.
Манерой поведения в воздухе эти аппараты больше напоминают вертолет на радиоуправлении. Для проведения маневров, сервопривод на хвостовом пропеллере отклоняет мотор в одну или другую сторону.
Также, как и RC-вертушки, дроны с тремя лучами умеют зависать, рыскать, скользить и разворачиваться вокруг своей оси.

Трикоптер: сильные и слабые стороны
В отличие от популярных квадрокоптеров, трикоптеры обделены вниманием RC-моделистов, несмотря на свои некоторые преимущества:
Универсальность. Можно использовать на улице или в помещении.
Маневренность, как у вертолета.
Сопротивляемость, ветру как у квадрокоптера.
Небольшой вес сравнительно с квадрокоптерами и гексакоптерами.
Продолжительный полет в сравнении с аналогичными четырех- и более роторными моделями.
Возможны флипы, сальто и прочие фигуры высшего пилотажа, а также интеллектуальные режимы пилотирования.
Доступная стоимость.

Поскольку трикоптеры – не частые гости RC-магазинов, моделисты, которые уже успели оценить их маневренность и послушность часто собирают такие дроны самостоятельно. Для начинающего пилота дрон с трехвинтовой конструкцией обходится дешевле, поскольку двигателей нужно только три, регуляторов скорости – три, да и пропеллеров меньше.
Для питания трех, а не четырех двигателей, нужно меньше энергии – соответственно один и тот же аккумулятор держит трикоптер в воздухе несколько дольше, чем держал бы, например, квадрик. Опять видимое преимущество.
Так в чем же недостатки? Трикоптеры не получили должного одобрения со стороны моделистов лишь по одной причине: ненадежный полет.
Если выходит из строя один мотор, аппарат немедленно падает камнем на землю и ничто его не остановит.

Другие дроны с тремя лучами
Известный производитель RC-техники Syma представил еще один вариант беспилотника с трехлучевой рамой.
Syma X51 обладает 6-ти осевым гироскопом, отлично держит равновесие и демонстрирует стабильный полет.
В арсенале Syma X51 несколько режимов полета и 3D флипы. Дрон компактный (17 см Х 14 см) и легкий (45 г), то есть с ним можно развлекаться в квартире или выйти на прогулку.
В борьбе за умы и приверженность RC-моделистов трикоптеры пока уступают квадрокоптерам и гексакоптерам, но это вовсе не означает, что они хуже.
Читайте также: