
Сверхтихоходный электродвигатель для эпу своими руками
Обновлено: 05.07.2024

Ниже речь пойдёт про управление низкооборотными трёхфазными бесколлекторными моторами в статичном режиме с использованием трёхфазного моста L6234.
Но сначала немного теории.
Что такое бесколлекторные моторы?
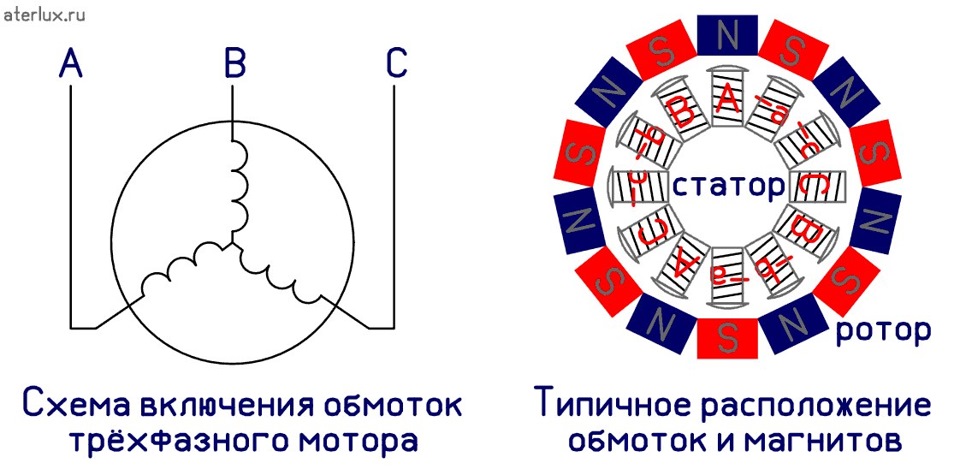
Как следует из названия, эти моторы у которых отсутствует щёточно-коллекторный узел. На вращающейся части – роторе – расположены постоянные магниты. На неподвижной части – статоре – обмотки электромагнитов. В движение такой мотор приводится изменением тока на разных фазах. Одним из примеров таких моторов являются шаговые двигатели. Изменение электрических фаз приводит к смещению ротора на строго предопределённый угол – один шаг.
Также есть моторы, рассчитанные на постоянное вращение. Например, двухфазные бесколлекторные моторы используются в компьютерных вентиляторах. Трёхфазные моторы используются в моделировании, а также в приводе электрических велосипедов и скутеров.
Отсутствие скользящих контактов щёток позволяет достигать большой мощности и долговечности.
Трёхфазные моторы
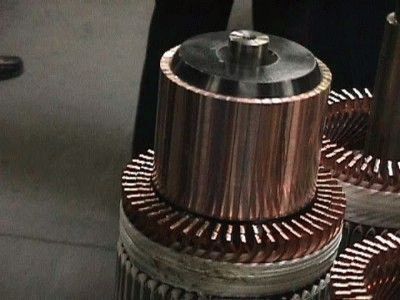
Рассмотрим типичный трёхфазный мотор, используемый в авиамоделировании.
Если ротор с магнитами расположен внутри кольца, образованного электромагнитными катушками, то такой мотор называют inrunner, такие моторы чаще используются в автомоделизме. В авиамоделизме популярна обратная компоновка: корпус ротора с кольцом магнитов вращается вокруг статора с электромагнитами (см. рисунок).

Эти моторы также подразделяются по количеству электромагнитов и количеству полюсов. Наиболее распространённая компоновка 12N14P что означает наличие 12 обмоток статора и 14 магнитных полюсов на роторе. Число полюсов всегда кратно 2: ведь полюса бывают только двух типов – северный и южный. Число обмоток кратно трём, поскольку двигатель трёхфазный. На схеме показана намотка обмоток. A B C – намотка соответствующей обмотки в одну сторону, -a -b -c – в противоположную.
Трёхфазный мост
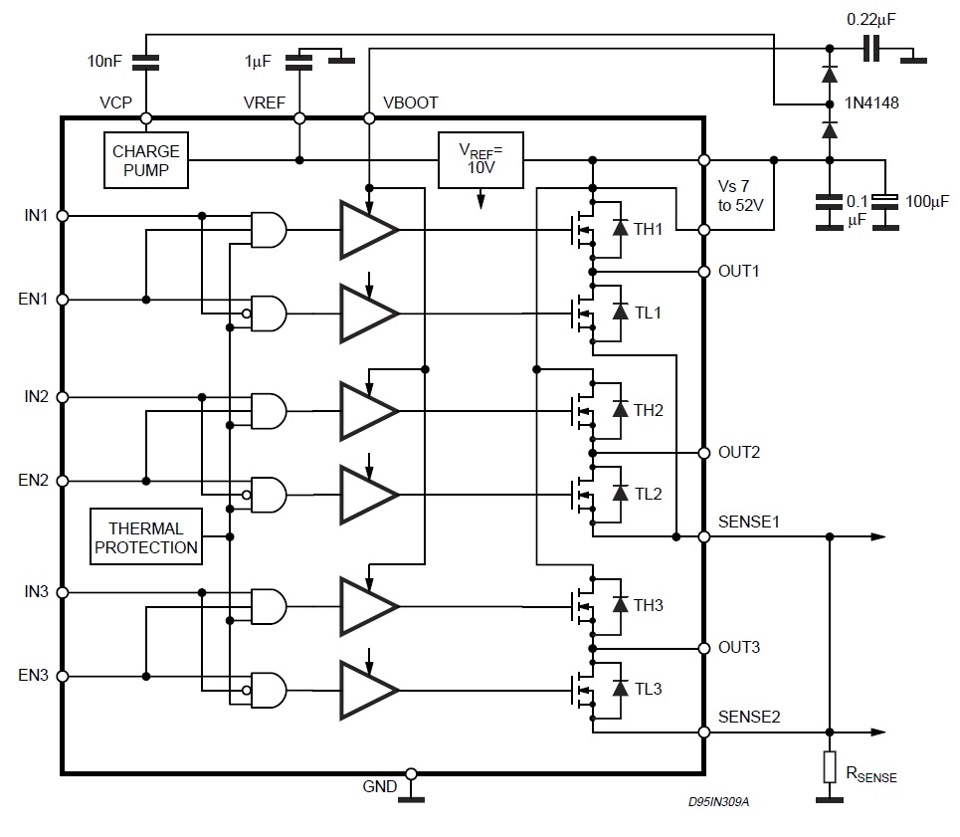
L6234 представляет собой сборку в одном корпусе трёх полумостов, на двух n-МОП транзисторах каждый, драйверов к ним и схемы подкачки напряжения для верхнего ключа. Каждый полумост управляется значениями на двух входах: один из них выбирает полярность (коммутировать плюс, или минус), а второй включает, или отключает полумост. Для управления высокоскоростными моторами вход включения можно использовать для контроля мощности при помощи ШИМ.
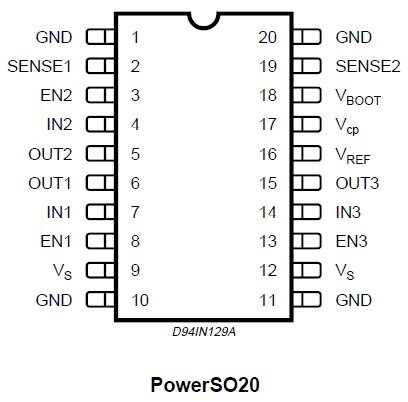
Максимальный ток, на который рассчитана микросхема — 4 Ампера.
Низкоскоростные моторы
Обмотки высокооборотистых моторов наматываются пучком толстой проволки, небольшим числом витков, порядка 10-20. Они обладают очень маленьким сопротивлением постоянному току, сила тока достигает десятков Ампер, и если мотор не вращается, обмотка может перегретсья и перегореть.
Но существует разновидность таких моторов, которые предназначены для работы в статичном положении. Их обмотки наматываются большим числом витков (порядка 100) тонкой проволкой. Подавая различные значения напряжений на входы, можно создать в его обмотках магнитное поле нужной полярности, и тем самым зафиксировать его в нужном положении.

Управление gimbal-мотором
GTCCR = (1 « TSM) | (1 « PSRASY) | (1 « PSRSYNC); // Блокировка счёта
OCR0A = 0;
OCR0B = 0;
OCR1A = 0;
OCR1B = 0;
OCR2A = 0;
OCR2B = 0;
TCCR0A = 0b10100001;
TCCR0B = 0b00000001;
TCNT0 = 0;
TCCR1A = 0b10100001;
TCCR1B = 0b00000001;
TCNT1 = 0;
TCCR2A = 0b10100001;
TCCR2B = 0b00000001;
TCNT2 = 0;
GTCCR &= ~(1 « TSM); // Разблокировка и одновременный запуск таймеров
Если на все 3 ШИМ выхода, управляющие одним мотором, подаётся одно и то же значение, то, хотя полярность каждого моста быстро меняется почти 16 тысяч раз в секунду, поскольку это происходит одновременно, ток через обмотки не идёт. Но если значение ШИМ хоть одного вывода отличается от остальных, то появляется небольшой промежуток времени, когда разные фазы коммутируются с разной полярностью, и через обмотки идёт ток. Чем больше разница значений ШИМ, тем большую часть времени ток будет идти.
Для того, чтобы зафиксировать мотор в нужном положении, значения ШИМ должны быть пропорциональны синусу, со смещением на треть периода (т.е. на 2/3*Pi).
Иначе говоря, значение ШИМ для i-й (от 0 до 2) фазы мотора можно вычислить по формуле:
PWM(i) = 128 + sin(A+ i * 2 / 3 * Pi) * P
Где P – выдаваемая мощность (до 127), A – электрический угол. Изменяя A можно добиться поворота мотора на определённый угол. Напомню, что изменение электрического угла на полный цикл, приводит к повороту мотора на два магнитных полюса. В схеме с 14 магнитами для целого оборота потребуется 7 циклов смены электрического угла
Если вещественную арифметику заменить на целочисленную, а значения синуса хранить в таблице, то скорости МК вполне хватит на управление такими моторами.
Бесколлекторные двигатели на сегодняшний день являются довольно распространенными. Применяются данные устройства чаще всего с электроприводами. Также их можно встретить на различном холодильном оборудовании. В промышленной сфере они задействованы в системах нагрева.
Дополнительно бесколлекторные модификации устанавливаются в обычные вентиляторы для кондиционирования воздуха. В наше время на рынке представлено множество моделей с датчиками и без них. При этом по типу регуляторов модификации довольно сильно отличаются. Однако чтобы разобраться в данном вопросе более подробно, необходимо изучить устройство простого двигателя.

Устройство бесколлекторной модели
Если рассматривать обычный трехфазный бесколлекторный двигатель, то катушка индуктивности у него устанавливается медного типа. Статоры используются как широтные, так и импульсные. Зубцы у них применяются разного размера. Как говорилось ранее, существуют модели с датчиками, а также без них.
Для фиксации статора используются колодки. Непосредственно процесс индукции происходит за счет обмотки статора. Роторы чаше всего применяются двухполюсного типа. Сердечники у них устанавливаются стальные. Для закрепления магнитов на моделях имеются специальные пазы. Непосредственно управление бесколлекторным двигателем происходит при помощи регуляторов, которые располагаются у статора. Для подачи напряжения на внешнюю обмотку в устройствах устанавливаются изолирующие затворы.

Принцип работы
Вентильный бесколлекторный двигатель ВМЭД, ДВУ является одним из видов электрического двигателя, который индуцирует непостоянные магнитные полюса на ферромагнитном роторе. Крутящий момент создается за счет магнитного сопротивления.
Фото – Бесколлекторный вентильный двигатель
Вентильные двигатели бывают трех типов:
- Синхронный;
- Асинхронный;
- Индукторный.
Конструкция вентильно-реактивного двигателя (ВРД) включает в себя две фазные обмотки, установленные вокруг диаметрально противоположных полюсов статора. При подаче питания ротор движется в соответствии с полюсами статора, благодаря чему, сопротивление магнитного поля сводится к минимуму. В основе работы вентильно индукторного двигателя используется тот же принцип.

Фото – Вентильный двигатель
В высокоэффективной переменной скорости привода магнетизм двигателя оптимизирован для работы с реверсом. Информация о положении ротора используется для управления фазы подачи напряжения. Благодаря этому обеспечивается непрерывный крутящий момент и высокая эффективность. Сигналы накладываются на угловую ненасыщенную фазу индуктивности, при этом ее максимальная величина соответствует минимальному сопротивлению полюса. Положительный момент производится только при углах, когда индуктивность градиента также является положительной.
Для защиты электроники от высоких вольт-секунд фазный ток на низких скоростях необходимо ограничивать. Как правило, это достигается за счет гистерезиса тока. Для контроля процесса используются специальные датчики.

Фото – Схема вентильного двигателя
На более высоких скоростях ток ограничен. Чтобы оптимизировать производительность, управляющее напряжение одиночного импульса используют с заранее выровненным углом.
Траектория реактивной энергии наглядно иллюстрирует механизм ее преобразования. Мощностная область представляет собой питание, которое преобразуется в механическую энергию (или она уже была преобразована генератором). При резком отключении питания остаточная или избыточная энергия возвращается к статору. Минимальное влияние магнитного поля на работу двигателя является его основным отличием от аналогичных устройств.
Преимущества вентильного двигателя:
- Благодаря небольшому магнитному сопротивлению минимизируются потери энергии;
- Высокие показатели безопасности (возможность работы при пиковых нагрузках);
- Широкий диапазон скоростей;
- Мягкое переключение скоростей.
К числу недостатков автоматизированных вентильных электродвигателей можно причислить:
- Высокий уровень шума;
- Сложно управление;
- Относительно высокая стоимость, по сравнению с аналогичными устройствами.
Видео: из чего состоят вентильные двигатели
Двухразрядные модели
Безколлекторные эл. двигатели данного типа часто используются в морозильном оборудовании. При этом компрессоры для них подходят самые разнообразные. В среднем мощность модели способна достигать 3 кВт. Схема бесколлекторного двигателя катушки чаще всего включает двойного типа с медной обмоткой. Статоры устанавливаются только импульсные. В зависимости от производителя длина зубцов может меняться. Датчики используются как электрического, так и индуктивного типа. Для систем нагрева указанные модификации походят плохо.
Также следует учитывать, что сердечники в бесколлекторных двигателях встречаются в основном стальные. При этом пазы для магнитов используются довольно широкие, а расположены они очень близко друг к другу. За счет этого частотность у устройств может быть высокой. Регуляторы для таких модификаций подбираются чаще всего одноканального типа.






Трехразрядные модификации
Трехразрядный бесколлекторный двигатель отлично подходит для систем вентилирования. Датчики у него используются, как правило, электрического типа. При этом катушки устанавливаются довольно широкие. За счет этого процесс индукции осуществляется быстро. В данном случае частотность устройства зависит от статора. Обмотка у него чаще всего встречается медного типа.
Предельное напряжение трехразрядные бесколлекторные двигатели способны выдерживать на уровне 20 В. Тиристорные модификации в наше время встречаются довольно редко. Также следует отметить, что магниты в таких конфигурациях могут устанавливаться как на внешней, так и на внутренней стороне роторной пластины.

Четырехразрядные модификации своими руками
Сделать четырехразрядный бесколлекторный двигатель своими руками можно абсолютно просто. Для этого необходимо в первую очередь заготовить пластину с пазами. Толщина металла в данном случае должна составлять примерно 2.3 мм. Пазы в этой ситуации обязаны находиться на расстоянии в 1.2 см. Если рассматривать простую модель, то катушку следует подбирать диаметром в 3.3 см. При этом пороговое напряжение она обязана выдерживать на уровне 20 В.
Колодки для устройства чаще всего подбираются стальные. В данном случае многое зависит от размеров роторной пластины. Непосредственно статор надо использовать с двойной обмоткой. При этом сердечник важно заготавливать стального типа. Если рассматривать модификации без регуляторов, то закончить сборку бесколлекторного двигателя можно установкой изолирующего затвора. При этом контакты устройства необходимо вывести на внешнюю сторону пластины. Для обычного вентилятора такие бесколлекторные модели подойдут идеально.
Конструкция
Тяговый вентильный двигатель (каталог Интерскол, Lenze, Борец для УЭЦН, ЭЦН) состоит из датчиков, которые указывают на положение ротора машины синхронного типа. Совокупность этих механизмов называется электромеханической частью двигателя. Управляющая часть устройства включает в себя микроконтроллер и силовой мост. Блок управления двигателем относится к логистическому неконструктивному участку системы.
Фото – Вентильный индукторный двигатель
Механическая часть устройства представляет собой синхронный привод, собранный из изолированных стальных листов. Такая конструкция способствует уменьшению вихревых токов, образующихся в обмотке и роторе.
Для нормальной работы прибора используются датчики Холла. Если в вентильном двигателе нет индикаторных приспособлений, сигналы поступают напрямую к магнитной установке. Этими же устройствами контролируется режим реверса. Это необходимо для того, чтобы при погружении двигатель не остановился, а также дает возможность дистанционно контролировать его работу и менять установки. Данная функция необходима при добыче нефти, угля, газа и буровых работах.

Фото – Принцип работы погружного двигателя
Шаговый микропроцессор обрабатывает все данные о положении ротора, согласно настройкам которого, контролируются ШИМ-сигналы. Нужно отметить, что при низком уровне данных сигналов, потребуется их усиление. Для этой цели используются специальные приборы, работающие по принципу микротрансформаторов.
| Марка, тип | Крутящий момент, Нм | Длина, мм | Максимально допустимая частота, мин-1 | Вес, кг |
| ДМВ 55 | 0,05; 1 | 61 | 420; 1800 | 0,4 |
| 5 ДВМ 55 | 0,23; 0,47; 0,7; 1,3 | 218 | 2000; 3000; 4000; 6000 | 4,5 |
| 5 ДВМ 155 | 2,3; 3,5; 4,7; 7 | 342 | 2000; 3000; 4000; 6000 | 13 |
| 5 ДВМ 165 | 10; 13; 17; 23 | 536 | 1000; 2000; 3000; 4000 | 67 |
| 5 ДВМ 215 | 23; 35; 47; 70 | 637 | 1000; 2000; 3000; 4000 | 28 |

Фото – Параметры вентильных двигателей
Расчет двигателей производится по следующим формулам:
Формула равновесия фаз: IRΣ+ EΣ= U
Сумма ЭДС – E1= Emsin(∂+∂0), амплитуда ЭДС – Em= ko1pФw1Ω = (ko1pФN1Ω) / 2
Обозначение угла коммутации двигателя:
Устройства с регулятором АВР2
Бесколлекторный двигатель с регуляторами данного типа на сегодняшний день является весьма востребованным. Подходят указанные системы больше всего для приборов кондиционирования. Также они в промышленной сфере широко используются для холодильного оборудования. Они способны работать с электроприводами различной частотности. Катушки у них чаще всего устанавливаются двойного типа. При этом статоры можно встретить только импульсные. В свою очередь, широтные модификации являются не сильно распространенными.
Датчики в бесколлекторных двигателях с регуляторами данной серии используются только индуктивные. При этом частотность устройства можно отслеживать по системе индикации. Колодки, как правило, устанавливаются контактного типа, и крепиться они могут непосредственно на статорной пластине. Регулятор бесколлекторного двигателя в данном случае позволяет менять частотность довольно плавно. Происходит данный процесс за счет изменения параметра выходного напряжения. В целом эти модификации являются очень компактными.

Двигатели с регуляторами АВР5
Бесколлекторный двигатель с регулятором данной серии часто применяется в промышленной сфере для управления различными электроприборами. В бытовых устройствах он устанавливается довольно редко. Особенностью таких бесколлекторных модификаций можно назвать повышенную частотность. При этом параметр мощности у них менять просто. Катушки в данных модификациях встречаются самые разнообразные. Также следует отметить, что магниты чаще всего устанавливаются на внешней стороне роторной коробки.
Затворы в основном используются изолированного типа. Монтироваться они могут как у статорной коробки, так и сердечника. В целом регулировка устройства происходит довольно быстро. Однако следует учитывать также и недостатки таких систем. В первую очередь они связаны с перебоями питания при низких частотах. Также важно упомянуть, что у моделей данного типа потребление электроэнергии довольно большое. При этом для управления интегральными электроприводами устройства не подходят.
Виды электродвигателей
Существуют следующие типы двигателей постоянного тока:
- с возбуждением при помощи постоянных магнитов;
- с последовательным соединением якоря и обмоток возбуждения;
- с параллельным соединением якоря и обмоток возбуждения;
- со смешанным соединением якоря и обмоток возбуждения;
- вентильный двигатель (бесколлекторный двигатель постоянного тока), выполненный при помощи замкнутой системы; в таком типе двигателя используется инвертор (силовой полупроводниковый преобразователь), преобразователь координат и ДПР (датчик положения ротора).
Двигателем переменного тока называют электрический двигатель, питание которого обеспечивает переменный ток. Существуют следующие типы двигателей переменного тока:
- гистерезисный двигатель;
- вентильный реактивный двигатель;
- асинхронный электродвигатель с частотой вращения ротора, отличающейся от частоты вращения создаваемого напряжением магнитного поля;
- синхронный электродвигатель с частотой вращения ротора, совпадающей с частотой вращения создаваемого напряжением магнитного поля.
Также существует УКД (универсальный коллекторный двигатель) с функцией режима работы как на переменном, так и на постоянном токе.
Ещё один тип двигателей – это шаговый электродвигатель с конечным числом положений ротора. Определённое указанное положение ротора фиксируется при помощи подачи питания на необходимые соответствующие обмотки. При снятии напряжения питания с одной обмотки и его передаче на другие происходит процесс перехода в другое положение.
Двигатель переменного тока при питании посредством промышленной сети обычно не позволяет достичь частоты вращения более трёх тысяч оборотов в минуту. По этой причине при необходимости получить более высокие частоты используется коллекторный двигатель, дополнительными преимуществами которого является лёгкость и компактность при сохранении необходимой мощности.
Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Ресурс любого асинхронного двигателя переменного тока заметно выше коллекторного. Определяется он состоянием изоляции обмоток и подшипников. Синхронный же двигатель при использовании инвертора и датчика положения ротора считается электронным аналогом классического коллекторного двигателя, поддерживающего работу посредством постоянного тока.
Использование регуляторов АВТ6
Данного типа регулятор скорости бесколлекторного двигателя на сегодняшний день пользуется большим спросом. Отличительной его особенностью можно смело назвать универсальность. Устанавливаются регуляторы, как правило, на бесколлекторные двигатели, мощность которых не превышает 2 кВт. При этом для управления системами вентилирования указанные устройства подходят идеально. Контроллеры в данном случае могут устанавливаться самые разнообразные.
Скорость передачи сигнала в данном случае зависит от типа системы управления. Если рассматривать тиристорные модификации, то они обладают довольно высокой проводимостью. При этом проблемы с магнитными помехами у них возникают редко. Самостоятельно собрать модель данного типа довольно сложно. В этой ситуации затворы чаще всего подбираются неизолированные.

Пример использования
В качестве примера настроим автоматическую калибровку ESC-регулятора при запуске скетча Arduino. Нам потребуются следующие компоненты:
Рассмотрим отдельные аспекты конструирования. Не станем обещать изготовление вечного двигателя, по типу творения, приписываемого Тесле, но рассказ предвидится интересным. Не станем тревожить читателей скрепками и батарейками, предлагаем поговорить, как приспособить уже готовый мотор под собственные цели. Известно, что конструкций масса, все используются, но современная литература базовые основы оставляет за кормой. Авторы проштудировали учебник прошлого века, изучая, как сделать электродвигатель собственноручно. Теперь предлагаем окунуться в знания, составляющие базис специалиста.
Почему в быту часто применяются коллекторные двигатели

Коллекторный тип двигателя
Если брать фазу на 220В, принцип работы электродвигателя на коллекторе позволяет изготовить устройства в 2-3 раза менее массивные, нежели при использовании асинхронной конструкции. Это важно при изготовлении приборов: ручные блендеры, миксеры, мясорубки. Помимо прочего, асинхронный двигатель сложно разогнать выше 3000 оборотов в минуту, для коллекторных указанное ограничение отсутствует. Что делает устройства единственно пригодными для реализации конструкций центрифужных соковыжималок, не говоря уже о пылесосах, где скорость часто не ниже.
Отпадает вопрос, как сделать регулятор оборотов электродвигателя. Задача давно решена путём отсечки части цикла синусоиды питающего напряжения. Это возможно, ведь коллекторному двигателю нет разницы, питаться переменным или постоянным током. В первом случае падают характеристики, но с явлением мирятся по причине очевидных выгод. Работает электродвигатель коллекторного типа и в стиральной машине, и в посудомоечной. Хотя скорости сильно отличаются.
Легко сделать и реверс. Для этого меняется полярность напряжения на одной обмотке (если затронуть обе, направление вращения останется прежним). Иная задача – как сделать двигатель с подобным количеством составных частей. Сделать самостоятельно коллектор вряд ли удастся, но намотать заново и подобрать статор вполне реально. Заметим, что от числа секций ротора зависит скорость вращения (аналогично амплитуде питающего напряжения). А на статоре лишь пара полюсов.
Наконец, при использовании указанной конструкции удаётся создать устройство универсальное. Работает двигатель без труда и от переменного, и от постоянного тока. Просто на обмотке делают отвод, при включении от выпрямленного напряжения задействуют полностью витки, а при синусоидальном исключительно часть. Это позволяет сохранить номинальные параметры. Сделать примитивный электродвигатель коллекторного типа не выглядит простой задачей, зато удастся целиком приспособить параметры под собственные нужды.
Особенности работы коллекторных двигателей
В коллекторном двигателе не слишком полюсов на статоре. Если говорить точнее, всего два — северный и южный. Магнитное поле в противовес асинхронным двигателям здесь не вращается. Вместо этого меняется положение полюсов на роторе. Подобное положение дел обеспечивается тем, что щётки постепенно движутся по секциям медного барабана. Особой намоткой катушек обеспечивается должное распределение. Полюса словно скользят по кругу ротора, толкая его в нужном направлении.
Для обеспечения режима реверса достаточно поменять полярность питания любой обмотки. Ротор в этом случае называется якорем, а статор – возбудителем. Включать эти цепи допустимо параллельно друг другу либо последовательно. И тогда начнут значительно изменяться характеристики прибора. Это описывается механическими характеристиками, взгляните на прилагающийся рисунок, чтобы представить утверждаемое. Здесь условно показаны графики для двух случаев:
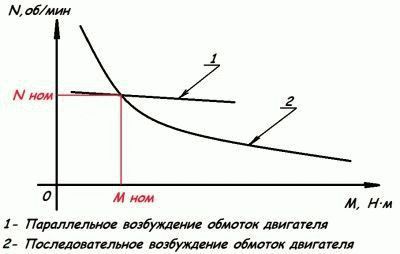
График изменения характеристик прибора
- При параллельном питании возбудителя (статора) и якоря (ротора) коллекторного двигателя постоянным током его механическая характеристика почти горизонтальна. Это значит, что при изменении нагрузки на вал сохраняется номинальная частота вращения вала. Это применяется на обрабатывающих станках, где изменение оборотов не лучшим образом сказывается на качестве. В результате деталь вращается при касании её резцом резво, как при старте. Если препятствующий момент слишком возрастает, происходит срыв движения. Двигатель останавливается. Резюме: если хотите двигатель от пылесоса применить для создания металлообрабатывающего (токарного) станка, предлагается обмотки соединить параллельно, ведь в бытовой технике доминирует иной тип включения. Причём ситуация объяснима. При параллельном питании обмоток переменным током образуется слишком большое индуктивное сопротивление. Указанную методику следует применять с осторожностью.
- При последовательном питании ротора и статора у коллекторного двигателя появляется прелестное свойство – большой крутящий момент на старте. Такое качество активно используется для страгивания трамваев, троллейбусов и, вероятно, электропоездов. Главное, что при увеличении нагрузки обороты не срываются. Если запустить в таком режиме коллекторный двигатель на холостом ходу, скорость вращения вала будет расти безмерно. Если мощность мала – десятки Вт – беспокоиться не стоит: сила трения подшипников и щёток, возрастание токов индукции и явление перемагничивания сердечника вкупе затормозят рост на конкретном значении. В случае промышленных агрегатов либо упомянутого пылесоса, когда его двигатель извлекли из корпуса, повышение скорости идёт лавинообразно. Центробежная сила оказывается столь велика, что нагрузки способны разорвать якорь. Поосторожнее при запуске коллекторных двигателей с последовательным возбуждением.
Коллекторные двигатели с параллельным включением обмоток статора и ротора отлично поддаются регулировке. За счёт внедрения реостата в цепь возбудителя удаётся значительно поднять обороты. А если такой присоединить в ветвь якоря, вращения, напротив, замедлится. Это массово используется в технике для достижения нужных характеристик.
Конструкция коллекторного двигателя и связь её с потерями
При конструировании коллекторных двигателей принимаются во внимание сведения, касающиеся потерь. Выделяются трёх видов:
-
Электрическими принято называть тепловые потери при движении токов по проводникам. Для снижения указанной величины обмотки выполняются из меди, имеющей наименьшее удельное сопротивление из доступных материалов. Понятно, что лучше взять серебро, а золото – просто отлично, но это слишком дорого. Тепловые потери зависят от сечения. Нельзя выбирать толщину проводников слишком малой. С этой точки зрения она ограничивается рассеиваемой мощностью, не меньше реально присутствующей в двигателе. Иначе обмотка сгорит. Слишком толстые проводники из меди, впрочем, сделают двигатель громоздким и тяжёлым, плюс – дорогим. Важное дополнение: двигатели обязаны сопровождаться средствами защиты. Уместны термопредохранители или реле, находятся в свободной продаже. А значения срабатывания выбираются ниже температуры выгорания обмотки (изоляции). Обычно 135 градусов Цельсия. Технические данные на предельные температуры проводов приводятся в характеристиках (data sheet).
Обычно при питании коллекторного двигателя переменным током используется последовательное включение обмоток. В противном случае выходит слишком большое индуктивное сопротивление.
К сказанному добавим, что при питании коллекторного двигателя переменным током вступает в роль индуктивное сопротивление обмоток. Поэтому при одинаковом действующем напряжении частота оборотов понизится. Полюса статора и корпус уберегаются от магнитных потерь. В необходимости этого легко убедиться на простом опыте: питайте маломощный коллекторный двигатель от батарейки. Его корпус останется холодным. Но если теперь подать переменный ток с прежним действующим значением (по показаниям тестера), картина изменится. Теперь корпус коллекторного двигателя начнёт греться.
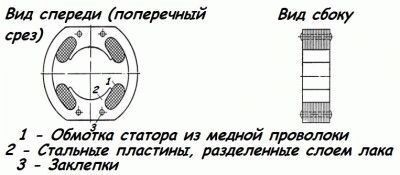
Эскиз сбора статора в поперечном срезе и сбоку
Потому даже кожух стараются собрать из листов электротехнической стали, клепая либо склеивая при помощи БФ-2 и аналогов. Наконец, дополним сказанное утверждением: листы набираются по поперечному срезу. Часто статор собирается по эскизу, показанному на рисунке. В этом случае катушка наматывается отдельно по шаблону, потом изолируется и надевается обратно, упрощая сборку. Что касается методик, проще нарезать сталь на плазменном станке, и не думать о цене мероприятия.
Проще найти (на свалке, в гараже) уже готовую форму для сборки. Потом уже намотать под неё катушки из медной проволоки с лаковой изоляцией. Заведомо диаметр подбирается больше. Вначале готовую катушку натягивают на первый выступ сердечника, потом на второй. Прижимают проволоку так, что по торцам остаётся небольшой воздушный зазор. Считается, подобное не критично. Чтобы держалось, у двух крайних пластин острые углы срезаются, оставшаяся серёдка отгибается наружу, отжимая торцы катушки. Это поможет собрать двигатель по заводским меркам.
Часто (особенно в блендерах) находится разомкнутый сердечник статора. Это не искажает форму магнитного поля. Раз полюс единственный, особой мощности ожидать не приходится. Форма сердечника напоминает букву П, между ножками литеры в магнитном поле вертится ротор. Под устройство сделаны кругообразные прорези в нужных местах. Подобный статор нетрудно собрать самостоятельно из старого трансформатора. Это проще, нежели сделать электродвигатель с нуля.
Сердечник в месте намотки изолируется стальной гильзой, по бокам – диэлектрическим фланцами, вырезанными из любого подходящего пластика.
С разбора CD-rom скопилось уже некоторое количество бесколлекторных двигателей постоянного тока (это те, что крутят диск). И место вроде много не занимают, но на глаза попадаются часто. Наконец принял решение, что надо уже как-то с ними определиться.

Итак, это бесколекторный двигатель постоянного тока, положение ротора в нём отслеживается тремя датчиками Холла, управляется при помощи микросхемы драйвера ВА6849FP (регулировка оборотов). В теории всё просто, а вот на практике впечатления могут зашкалить уже от одного обозрения платки на которой движок собственно и установлен.

Поэтому не стал вникать в назначение многочисленных выводов шлейфа, а просто взял и располовинил двигатель, и увидел его статор. Однако полный обзор печатной платы был по прежнему недосягаем. Осознав, что без жертв не обойтись, отпаял провода (3 штуки) идущие с обмоток статора на плату, а затем сложил – переломил вдвое плату вместе с металлической пластиной крепления.

Схема сборки

Остановился вот на такой схеме снятия с электродвигателя, впрочем, теперь уже генератора, вырабатываемого им электрического тока. Данная схема была собрана и опробована со следующими номиналами электронных компонентов: С1 – 100 мкФ х 16 В, все шесть диодов 1N5817.




Схема собрана, вновь обращённый генератор к тесту готов.

При интенсивном, но без мазохизма, вращении большого зубчатого колеса пальцами рук напряжение легко достигает отметки в 1,7 вольта (без нагрузки).

При подключении нагрузки, лампочки на 2,5 В и 150 мА, сила тока достигает 120 мА. Лампочка вспыхивает в пол накала.
Видео - работа под нагрузкой
Форум по обсуждению материала ГЕНЕРАТОР ИЗ ДВИГАТЕЛЯ СВОИМИ РУКАМИ

Что такое OLED, MiniLED и MicroLED телевизоры - краткий обзор и сравнение технологий.

Переделываем игрушку обычный трактор в радиоуправляемый - фотографии процесса и получившийся результат.

Про использование технологии беспроводного питания различных устройств.

Микрофоны MEMS - новое качество в записи звука. Описание технологии.
Войти
Авторизуясь в LiveJournal с помощью стороннего сервиса вы принимаете условия Пользовательского соглашения LiveJournal
Доработка G-2021 (часть 4)

Совершенно случайно наткнулся на ветку форума, где человек описывает свой вариант доработки Арктур-006. Меня это заставило сильно задуматься о корпусе - а не сделать ли все-таки деревянный? Сразу нашлось несколько аргументов "за":
- хоть мне дерево и не нравится, зато оно нравится тем, перед кем буду понтоваться;
- уходит проблема демпфирования корпуса;
- уходит проблема покраски, она заменяется более предсказуемой отделкой;
- появляется свобода дизайна, фактичкски, это полный уход от Арктура, остается только Unitra.
Из аргументов "против" есть фактически только один - я никогда не работал с деревом, не знаю, как выбрать материал, как его обработать, как отделать поверхность.
По такому поводу стало интересно, как оформляла свои проигрыватели фирма Unitra.
Unitra - это крупное польское производственное объединение, в него входило более сорока предприятий. Одним из них был завод Fonica в городе Лодзь, который специализировался на выпуске виниловых проигрывателей. Первый проигрыватель был выпущен в начале 50-х годов, а в 70-х их производство было массовым. К тому времени уже существовало ЭПУ G-600 и его модификации с пассиково-роликовым, а потом с пассиковым косвенным приводом. Эти ЭПУ известны нам по проигрывателям "Вега". Но с ЭПУ G-2021 у него было мало общего. Первое ЭПУ, которое имело некоторые общие черты G-2021, появилось в начале 80-х и называлось G-8010. Это ЭПУ имело практически такой же тонарм, который позже будет использоваться на G-2021, только у него был другой компенсатор скатывающей силы на основе рычага с грузиком.

Для этого ЭПУ были впервые указаны геометрические параметры тонарма:

В ЭПУ G-8010 был пассиковый привод, хотя сам диск был почти такой же, как в G-2021:

На основе этого ЭПУ выпускалось много разных проигрывателей под разными торговыми названиями, многие делались на экспорт. Например, проигрыватель ALTUS P-100.

Немного позже появилось ЭПУ, практически полностью совпадающее с G-2021. На его основе делались проигрыватели "Adam" GS-420 и GS-424 в деревянном корпусе.


В ЭПУ этих проигрывателей впервые в истории Fonica был применен прямой привод, причем довольно необычной конструкции - на основе линейного электродвигателя. Интересно было узнать, откуда появилась такая конструкция. Завод Fonica имел лицензии фирм Telefunken, Thomson, Tenorel. Но среди их продукции похожего проигрывателя не было. Unitra сотрудничала еще и с японской компанией Sanyo, которой, в свою очередь, принадлежал бренд Fisher. Вот среди продукции Fisher очень похожий проигрыватель нашелся. Это Fisher MT6225 (его фото - заглавное в этом посте). В этом проигрывателе был впервые применен прямой привод на основе линейного электродвигателя, что в свое время наделало много шума. Статьи про MT6225 появлялись в различных изданиях, в том числе, в октябрьском номере за 1977 год журнала "Popular Science".

У обычных прямоприводных двигателей, которые в то время уже использовались в проигрывателях, были относительно большие пульсации момента из-за малого количество полюсов (обычно 12). Что вызывало повышенный уровень детонации и рокота. Двигатель MT6225 имел 120 полюсов в виде магнитной полосы на диске, 25 из которых постоянно взаимодействовали с катушками статора. Благодаря этому детонация была снижена до 0.03%, а уровень рокота лежал ниже уровня -70 дБ.


Интересно то, что не только двигатели MT6225 и G-2021 были очень похожими. Похожей была вся внутренняя компоновка (программная шестерня автостопа, рычаги автостопа и возврата тонарма, тяга кнопки "стоп", расположение кнопок и регуляторов).


Электрические схемы тоже были очень похожи, но и тут схема MT6225 оказалась более продуманной - она не применяла никаких дефицитных микросхем, обычные ОУ 4558 были просто умощнены транзисторами.

Одновременно с GS-420 и GS-424 были заявлены проигрыватели GS-421 и GS-425, которые тоже были прямоприводные, но с двигателем обычной конструкции. Неизвестно, выпускались ли они вообще.

Дальнейшее развитие модельной линейки ЭПУ шло по пути удешевления и упрощения конструкции. Прямоприводных двигателей больше не делали, конструкции тонармов упростили, диск сделали более легким. В поздних моделях проигрывателей (GS-464 и других) использовалось ЭПУ, которое ближе к G-602, чем к к G-2021. Это был шаг назад. Вскоре и вовсе настали трудные времена, завод практически прекратил выпуск продукции.

В начале 90-х на заводе Fonica собирался проигрыватель Thorens TD 180 и готовились к выпуску другие модели Thorens. Но выпуск продолжался недолго, завод Fonica был окончательно закрыт в 1992 году.

Как ни странно, в 2012 году в городе Лодзь производство виниловых проигрывателей под маркой Fonica возобновилось. Но теперь там выпускают недоступные для простых смертных аудиофильские агрегаты с причудливым дизайном и очень примитивные технически.
Читайте также: