
Робот для настольного тенниса своими руками
Добавил пользователь Skiper Обновлено: 05.10.2024
За последние 3 месяца в нашей онлайн-школе прошло порядка 10 онлайн-семинаров, на которых мне задавали очень много вопросов.
Но некоторые вопросы меня очень удивляли. Особенно вопросы, касающиеся тренировочного процесса, как для взрослых, так и для юных спортсменов.
Мифическое упражнение №1
Игра разными ракетками
Начинаю именно с этого момента, поскольку такой вопрос звучал раза 3, а следовательно есть, как минимум, несколько человек, введенных в заблуждение.
Мой ответ – однозначно нет!
Все дело в том, что у разных ракеток разная степень жесткости и сцепления накладок. А это во многом ключевой фактор в становлении техники топ-спина. Если вы привыкли играть, к примеру, средним по скорости основанием с жесткой накладкой, то значит, вы вкладываете в топ-спин достаточно мощи и ускорения, иначе он бы у вас просто не полетел.
Теперь представьте, что вы берете быстрое основание с мягкими накладками и делаете топ-спин им.
Сначала мяч у вас летит за стол, потом вы приноравливаетесь и посылаете топ-спин с меньшим вложением и ускорением, чем обычно. При этом вам кажется, что мяч вроде бы летит также, как и от вашей ракетки.
И так и есть, но по скорости. Мощи и вращения в вашем топ-спине становится значительно меньше.
После этого вы берете свою ракетку и уже не считаете нужным вкладываться, как раньше — мышечная память чуть сбилась. Чувствуете, что что-то не так и тратите пару дней на восстановление.
Итак, результат – несколько потерянных дней из-за попытки усилить чувство мяча.
И я привел пример только одной смены ракетки. Страшно представить, что там получится, если ракеток будет больше трех..
Дам маленький совет, как реально улучшить чувство мяча.
Попробуйте надеть перчатку на руку и поделать топ-спин. В юности я периодически так делал. Очень хорошо помогает в начале тренировки почувствовать мяч. Когда снимаешь перчатку, то значительно лучше чувствуешь мяч.
Я делал это редко, поэтому не буду советовать делать это постоянно. Но все же попробуйте и напишите в комментариях об эффекте.
Мифическое упражнение №2
Играть 50% времени неигровой рукой
Здесь я буду несколько менее категоричен, чем с первым мифом, но…
50% — это явный перебор, неужели непонятно?
Профессор Радивой Худец (идеолог фирмы TIBHAR) в своей книге рекомендует играть 15% времени на каждой тренировке левой рукой (если вы правша).
Большинство специалистов даже этот процент назвали завышенным. Поскольку часто не хватает тренировочного времени, чтобы полноценно отработать необходимые вещи.
Так сколько же все-таки надо играть левой рукой на тренировке?
Однозначно сказать нельзя.

Большинство спортсменов, которых я знаю, действующих игроков национальной сборной, не практиковали и не практикуют игру левой рукой вообще, разве, что иногда побаловаться и сыграть пару сетов.
Ни разу не видел на международных турнирах, чтобы во время тренировки кто-либо из сильнейших спортсменов мира (китайцы в том числе) хоть сколько-то играл левой рукой.
Поэтому я бы рекомендовал игру левой рукой в качестве забавы, чтобы немного повеселиться, ну и для того, чтобы вестибулярный аппарат поработал в другом направлении – это раскрепощает мозговую деятельность.
Увлекаться этим занятием тоже не стоит.
Мифическое упражнение №3
Имитация на большом колесе
Имитация на колесе – упражнение довольно известное и в настольном теннисе распространенное.
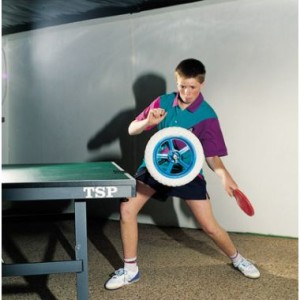
На мой взгляд это уже слишком большой размер.
Во многих залах можно еще встретить тренажер, сделанный из переднего колеса советского велосипеда. Также сейчас некоторые фирмы выпускают такие колеса, которые крепятся на стол.
Мое мнение насчет этого упражнения следующее.
Имитация на большом колесе не дает ровным счетом ничего, а по мне так только портит технику.
Давайте разберемся.
Имитация на колесе нужна для того, чтобы научиться (либо улучшить) вращать мяч. Но давайте будем откровенны: вращать теннисный мяч диаметром 40 мм и вращать огромное колесо, которое по диаметру раз в 30 большее – это совершенно разные вещи.
Теннисному мячу мы придаем вращение (при топ-спине) за счет правильного наклона ракетки, работы кисти и предплечья.
Когда же мы крутим это большое колесо, то мы вынуждены намного сильнее открывать ракетку, чем это нужно будет делать в реальности и делать более медленное движение предплечьем, что опять же не создает никаких предпосылок для улучшения вращения в реальной ситуации.
Поэтому мое мнение насчет этого упражнения отрицательное. Извините, если уж кого-то обидел.

А вот такой размер в самый раз для отработки качества вращения.
Но есть и другая сторона имитации на колесе. Изредка можно встретить маленькие колесики размером с теннисный мяч или чуть больше.
Вот это уже другое дело. У моего отца есть такое колесико, сделано оно из резины. Появилось у него это колесико еще до моего рождения.
На этом колесе очень много занимался в детстве я и другие ученики моего отца (ряд которых стал призерами юношеских первенств Европы, победителями и призерами первенств России).
Скажу, что эффект от работы на таком колесике был значительный. Здесь, как раз можно подобрать правильный наклон ракетки и делать движение с нужным ускорением предплечья.
Если у тебя ударное движение, и ты по большому счету не вращаешь мяч, то имитируя на таком колесике, все сразу становится очевидным. Оно слабо крутится и по нему получается шлепок.
В результате же работы, ты начинаешь, как бы скользить по мячу с более правильным наклоном. Затем ты переносишь это на стол в реальные условия и чувствуешь улучшение вращения.
Но такие колесики, как правило, были без крепления к столу, что с одной стороны даже хорошо, поскольку тренер может постепенно перемещаться (когда работает со спортсменом), держа такое колесико и менять его высоту.
С другой стороны, очевидно, что для такой работы нужен партнер. Хотя я, бывало, тренировался и один. Сам держал его левой рукой и тренировал вращение мяча.
Последние годы в продаже я таких тренажерчиков не видел, но, возможно, стоит поискать. Либо, как вариант, заказать какому-нибудь умельцу или сделать самому, если есть такое умение.

Приключения электроника
– Я еще с седьмого класса знал, что буду либо хирургом, либо инженером-электронщиком, – признался Михаил Агеев.
Изобретатель родился в семье военных в Тамбове. Военный городок, в котором прошло детство Михаила, находился неподалеку от аэродрома. Мальчик все время приносил в дом части самолетов, к которым приделывал провода и пытался оживить, воткнув в розетку.
– Какое-то время что-то работало, потом шел дым, слышался хлопок – и проводка сгорала. Из-за моего увлечения проводка в нашем доме состояла из связанных и скрученных между собой кусков. Спасибо родителям, что относились к этому с пониманием и не отбили охоту что-то делать своими руками, – рассказал инженер.
Помимо программирования и электроники хобби Михаила Агеева – рыбалка, в частности на карпа. Перед тем как ловить рыбу, ее нужно прикормить в определенном месте. Рыбаки используют специальный кораблик для завоза прикормки, управляемый по радио и плывущий тихо, чтобы не распугать рыбу.
– Я решил сделать свой кораблик, работающий на радиоуправлении. Он подплывает к нужной точке, нажимаете кнопку – он сбрасывает корм и тихо уплывает. После того как рыба соберется у корма, мы забрасываем снасти, – говорит Михаил.
Корпус кораблика и его электронику Михаил Агеев сделал сам, добавив ноу-хау – воздушный винт, который не позволял бы судну запутываться в водорослях. После последней рыбалки кораблик остался на родине изобретателя, в Тамбове.
Валентин
У Михаила Агеева есть еще одно хобби – в свободное время он играет в настольный теннис.

– В детстве я никогда не посещал спортивные кружки или школы. Все началось с того, что на прошлой работе руководство купило стол для настольного тенниса. Так в течение двух лет я научился неплохо играть. Сейчас мы с коллегами и друзьями играем в обеденный перерыв и по вечерам, – сообщил Михаил.
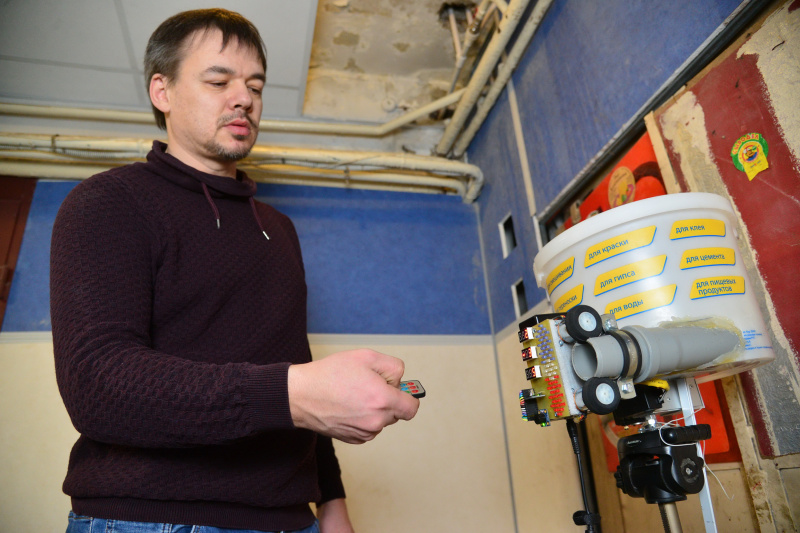
Для совершенствования навыков он решил собрать робот-тренажер, подающий мячики.
– Было интересно заложить в него часть своего интеллекта и получить удовольствие от результата, – поделился Михаил Агеев.

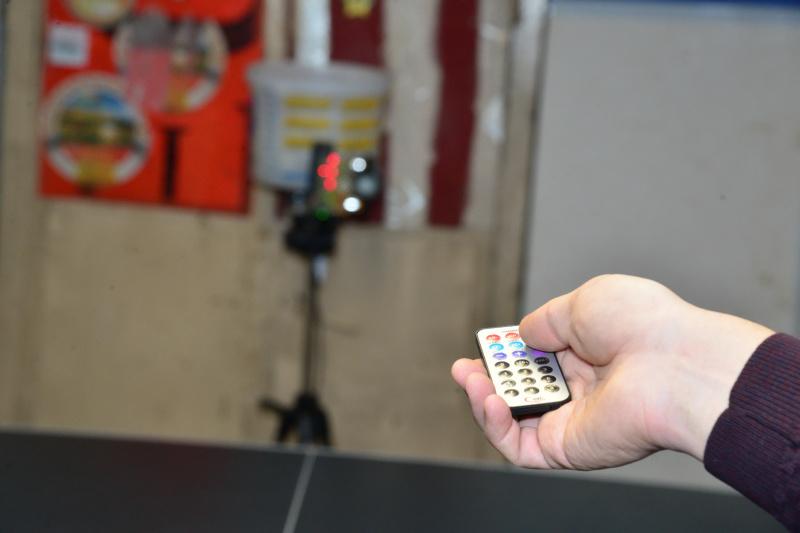
Механизм работы Валентина прост. В емкости для мячей вращается диск с прорезями, который подает мячики в трубу, а оттуда они по очереди попадают в так называемую пушку. На ней установлены два двигателя с валиками, которые могут вращаться с разной скоростью. Мяч попадает между валиками и выстреливает. Параметры выстрела можно задавать с помощью пульта дистанционного управления.
– Для поворота пушки под разными углами я использовал серводвигатель. Он поворачивает робота под углом, который я ему задаю, – отметил Михаил Агеев.
Робот не катается на колесиках – он статичен. Полноценно играть в теннис он также не может – электронный Валентин не отбивает, а только подает мячики. Создатель робота не называет свое детище изобретением – подобные роботы давно запущены в промышленное производство. Однако воронежский робот-теннисист уникален своим интеллектом.
– Функционал, который я в него заложил, гораздо богаче того, который имеют самые продвинутые промышленные образцы. Например, промышленные роботы всегда подают мячики в одну фиксированную точку или в две. А я сюда добавил программу, благодаря которой робот сможет, подобно живому игроку, рандомно поворачиваться и выбирать точку, куда он будет подавать мячик, – пояснил Михаил.
Валентин обошелся примерно в 5 тыс. рублей. Для сравнения: стоимость аналогичных промышленных роботов – от 20 тыс. (для простеньких китайских) до 250 тыс. рублей (для брендовых). При этом по функционалу Валентин ничем не уступает самым дорогим роботам.
– Самые дорогие брендовые роботы делают то же самое, что и мой робот. Скоро сделаю режим поворота – и он будет их превосходить, – похвастался воронежец.
Перед тем как Валентин начнет работать, Михаил Агеев пультом задает ему нужные для тренировки параметры – например, частоту или скорость подачи мячей. Всего таких скоростей 25, для новичков оптимальна пятая.
To view this video please enable JavaScript, and consider upgrading to a web browser that supports HTML5 video
Воронежец создал робота-теннисиста
– На 25-й скорости играть крайне сложно: идет уже тренировка не только техники, но и выносливости. Мячи при этом вылетают раз в секунду. Кстати, настольный теннис отлично спасает от сидячей офисной работы. Два часа игры эквивалентны десяти километрам бега, – утверждает Михаил.
Игрок становится напротив робота, а тот начинает беспрерывно выстреливать один за другим теннисные шарики. Михаил Агеев отбивает их ракеткой, направляя на противоположную часть стола. Робот останавливается, когда емкость для мячей пустеет. К тому моменту на полу скапливается масса шариков. Изобретатель раскрыл секрет: скоро у робота появится сетка, улавливающая отбитые мячи – это позволит не собирать их по всему помещению.

– Цель спортсмена – подать мяч как можно сложнее для своего противника. Соответственно, люди пытаются делать виртуозные подачи, закрутки, которые очень сложно отбить. Робот ничем не уступает им, к тому же он не устает, его точность и стабильность подачи мячей гораздо выше, чем у человека, – пояснил создатель робота.
Воронежец давно мечтает вести занятия по робототехнике для детей. Пока у Михаила Агеева только один ученик, с которым он изучает основы электроники и программирования.

– Мне интересно попробовать себя в роли преподавателя. Деньги за это брать не хочу – могу вести занятия бесплатно. Хочется передать свои знания и опыт следующему поколению, – признался инженер.

Чтобы научиться играть в настольный теннис на уровне продвинутого спортсмена, необходимо регулярно тренироваться, в идеале – уделять занятиям 1-2 часа каждый день. С современным игровым оборудованием делать это можно и в отсутствие напарника. Тренировки с роботами Newgy Robo-Pong от Donic не менее интересны и эффективны, чем с живым человеком. Покупка качественного устройства позволит заниматься в любое удобное время и не зависеть от спарринг-партнера.
Разберемся – что умеют роботы для настольного тенниса
Почему именно Donic?
Название этой немецкой компании на слуху у каждого любителя настольного тенниса. Роботы-тренажеры, выпускаемые под брендом Donic, характеризуются:
- Простотой управления.
- Великолепным качеством сборки. Оборудование исправно служит годами, не требуя ремонта и замены (даже при ежедневной активной эксплуатации).
- Повышенной прочностью. Используемые при производстве продукции материалы отлично переносят механические воздействия, не боятся влаги, не деформируются под воздействием солнечных лучей.
- Привлекательным лаконичным дизайном.
- Удобной и интуитивно понятной настройкой индивидуальных параметров.
Обзор популярных моделей
Теннисистам, желающим приобрести настольный робот Newgy Robo-Pong, мы рекомендуем обратить внимание на следующие варианты:
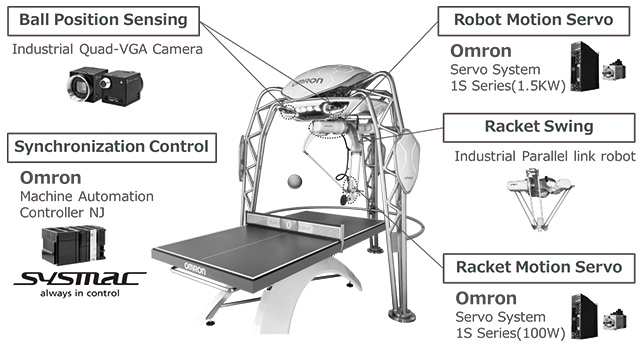
Шашки, шахматы, го, покер в прошлом, настало время активных видов спорта. Японская компания Omron представила робота, играющего в настольный теннис (пинг-понг). Роботы-тренеры есть давно, но этот еще и играет, и как!

Знакомтесь - Forpheus и его оппонент . нет, не Эндрю Баггали (чемпион мира по пинг-понгу), но довольно сильный соперник - Dan Ives из TableTennisDayly (пп рейтинг ~2300, где-то 200-й в мире)
Программное обеспечение робота отслеживает не только полет мяча, но и действия противника, что позволяет определить подкрутку и предсказать траекторию. В отличии от человека, робот не устает и, как видно из видео, умудряется весело трепаться, легко отражая атаки соперника.
Новость довольно старая (версия 4 робота показана в 2017-м), здесь версия 5 (2019), но на Пикабу ее вроде не было

Лига роботов
46 постов 527 подписчиков
Правила сообщества
ДЛЯ АВТОРОВ:
Приветствуются:
-уважение к читателю и открытость
-использование проверенных источников
ДЛЯ ЧИТАТЕЛЕЙ:
Приветствуются:
-конструктивные дискуссии на тему постов
Не рекомендуются:
-личные оскорбления и провокации
-не подкрепленные фактами утверждения
Накидывает ведущий, ни подкруток, ни подрезок.
Похож на треножник из войны миров, только еще маленький.
В случае проигрыша эта хуйня уносит тебя в страну роботов.
А по моему, это робот Страйдер из Half-Life 2. Значит ли это, что это бета версия Half-Life 3?

Человек много чего ещё делать умеет, а эта машинка только теннис.
Ну вы конечно проснулись. Видео про Octo-Bouncer вышло на Ютубе почти два года назад:
Автор написал короткую статью о разработке, привожу ее перевод.
Я задумался о создании машины для жонглирования мячом в 2015 году. Первые попытки осуществить задуманное я совершил в 2017. Сейчас на дворе 2020 год, и наконец-то у меня получилось создать аппарат, способный надежно жонглировать мячом для настольного тенниса. Текущая конфигурация робота способна удерживать мяч в движении в течение нескольких часов.
Комплектующие
- 1х микроконтроллер Teensy 4.0, прошитый вот этим кодом
- 4х драйвер для шаговых двигателей StepperOnline DM442S
- 4х шаговый двигатель Nema 17 с планетарным редуктором 5:1
- 1х блок питания на 48 В, 8 А
- 1х камера e-con Systems See3CAM_CU135
- Компьютер с Windows и OpenCV
- Чертежи частей выполнены в этом проекте Fusion360
Почему Teensy 4.0?
Потому что он работает на частоте 600 МГц. Сравните с 16 МГц, на которых работает большинство плат Arduino. Почему тактовая частота так важна? Потому что необходимо генерировать импульсы с частотой до 250 кГц для каждого из 4-х шаговых двигателей. Поскольку мы хотим, чтобы шаговые двигатели запускались и останавливались плавно, интервал между импульсами должен увеличиваться/уменьшаться по синусоидальному или сигмовидному закону. Линейное увеличение скорости, скорее всего, не сможет обеспечить необходимую плавность движения. Выходит слишком много вычислений для 16 МГц, поэтому я остановил свой выбор на Teensy 4.0.
В качестве приятного бонуса мы получаем FPU (модуль для работы с числами с плавающей запятой), поддерживающий как 32-битные, так и 64-битные числа.
Нам действительно нужно 600 МГц?
- Чем больше микрошагов, тем лучше- Чем выше напряжение, тем лучше
Я установил настройку микрошага на своих драйверах на 25 600 шагов за оборот. Не забывайте, что мы используем редуктор 5:1. Выходит 128 000 шагов за оборот. Выбор частоты 250 кГц уже не кажется слишком нелогичным. На следующем изображении показаны первые 9 мс сигнала длительностью 150 мс:
Отчетливо видно, как импульсы сужаются ближе к правому краю. Частота плавно увеличивается. Движение начинается медленно и плавно набирает скорость. Имейте в виду, что на изображении видны только первые 9 миллисекунд этого сигнала. Частота пойдет вверх, а затем снова начнет уменьшаться.
Что делает микроконтроллер?
Микроконтроллер Teensy 4.0 выполняет простую программу:
1. Слушает команды движения, передаваемые по последовательной шине
2. Генерирует импульсы для управления шаговыми двигателями
Команды выглядят следующим образом:
Каждая команда содержит 5 чисел, разделенных двоеточиями. Первые 4 значения — это абсолютные позиции двигателей (в радианах), пятое значение — время движения. С помощью инструкции, приведенной в качестве примера, мы говорим машине переместить все свои двигатели в абсолютное положение 0.11941 радиан за 0.15 секунд. Машина будет выполнять команды последовательно, в порядке поступления.
Что делает приложение на компьютере?
Я написал приложение для обработки изображений размером 640x480 пикселов со скоростью 120 кадров в секунду. Приложение выполняет следующую программу:
- Настраивает камеру (поток данных 120 FPS, разрешение 640x480, усиление, экспозиция, контрастность, ISO, насыщенность) через OpenCV
- Распознает окружность с помощью алгоритма преобразования Хафа из библиотеки OpenCV
- Находит трехмерное положение мячика для пинг-понга
- Рассчитывает скорость мяча
- Использует положение и скорость шарика для расчета коррекции наклона пластины с помощью ПИД-регулятора
- Рассчитывает инверсную кинематику, чтобы выяснить, как с помощью поворота двигателей поднять пластину на определенную высоту с определенным наклоном
- Отправляет результаты расчета инверсной кинематики в микроконтроллер через последовательный интерфейс
- Отрисовывает мяч, движения машины и результаты обработки изображения с камеры
Как я изготовил алюминиевые части
Мой аппарат состоит из более чем 150 алюминиевых деталей. Производство всех деталей потребовало очень много терпения. Мой станок Benbox CNC 1310 работал (почти) без остановок в течение нескольких недель. Общее время обработки всех деталей составило около 160 часов.
Еще я сделал звуконепроницаемый контейнер для станка, чтобы не сойти с ума :)
Я использовал фрезу диаметром 1.5 мм и лист алюминиевого сплава 6061 толщиной 3 мм. Я закреплял рабочую поверхность четырьмя болтами, чтобы обеспечить максимально ровную поверхность. Прикрепляю еще несколько фотографий, сделанных во время работы над проектом.
Читайте также: