
Радиоуправление своими руками
Обновлено: 03.07.2024
Для радиоуправления различными моделями и игрушками может быть использована аппаратура дискретного и пропорционального действия.
Постройка и налаживание аппаратуры пропорционального действия достаточно сложны и не всегда под силу начинающему радиолюбителю.
Хотя аппаратура дискретного действия и имеет ограниченные возможности, но, применяя специальные технические решения, можно их расширить. Поэтому далее рассмотрим однокомандную аппаратуру управления, пригодную для колесных, летающих и плавающих моделей.
Схема передатчика
Для управления моделями в радиусе 500 м, как показывает опыт, достаточно иметь передатчик с выходной мощностью окьло 100 мВт. Передатчики радиоуправляемых моделей, как правило, работают в диапазоне 10 м.
Однокомандное управление моделью осуществляется следующим образом. При подаче команды управления передатчик излучает высокочастотные электромагнитные колебания, другими словами, генерирует одну несущую частоту.
Приемник, который находится на модели принимает сигнал, посланный передатчиком, в результате чего срабатывает исполнительный механизм.

Рис. 1. Принципиальная схема передатчика радиоуправляемой модели.
В итоге модель, подчинясь команде, меняет направление движения или осуществляет одно какое-нибудь заранее заложенное в конструкцию модели указание. Используя однокомандную модель управления, можно заставить модель осуществлять достаточно сложные движения.
Схема однокомандного передатчика представлена на рис. 1. Передатчик включает задающий генератор колебаний высокой частоты и модулятор.
Задающий генератор собран на транзисторе VT1 по схеме емкостной трех-точки. Контур L2, С2 передатчика настроен на частоту 27,12 МГц, которая отведена Госсвязьнадзором электросвязи для радиоуправления моделями.
Режим работы генератора по постоянному току определяется подбором величины сопротивления резистора R1. Созданные генератором высокочастотные колебания излучаются в пространство антенной, подключенной к контуру через согласующую катушку индуктивности L1.
Модулятор выполнен на двух транзисторах VT1, VT2 и представляет собой симметричный мультивибратор. Модулируемое напряжение снимается с коллекторной нагрузки R4 транзистора VT2 и подается в общую цепь питания транзистора VT1 высокочастотного генератора, что обеспечивает 100% модуляцию.
Управляется передатчик кнопкой SB1, включенной в общую цепь питания. Задающий генератор работает не непрерывно, а только при нажатой кнопке SB1, когда появляются импульсы тока, вырабатываемые мультивибратором.
Посылка в антенну высокочастотных колебаний, созданных задающим генератором, происходит отдельными порциями, частота следования которых соответствует частоте импульсов модулятора.
Детали передатчика
В передатчике использованы транзисторы с коэффициентом передачи тока базы Ь2іэ не менее 60. Резисторы типа МЛТ-0,125, конденсаторы — К10-7, КМ-6.
Согласующая антенная катушка L1 имеет 12 витков ПЭВ-1 0,4 и намотана на унифицированном каркасе от карманного приемника с подстроечным ферритовым сердечником марки 100НН диаметром 2,8 мм.
Катушка L2 бескаркасная и содержат 16 витков провода ПЭВ-1 0,8 намотанных на оправке 010 мм. В качестве кнопки управления можно использовать микропереключатель типа МП-7.
Детали передатчика монтируют на печатной плате из фольгированного стеклотекстолита. Антенна передатчика представляет собой отрезок стальной упругой проволоки 01. 2 мм и длиной около 60 см, которая подключается прямо к гнезду XI, расположенному на печатной плате.
Все детали передатчика должны быть заключены в алюминиевый корпус. На передней панели корпуса располагается кнопка управления. В месте прохождения антенны через стенку корпуса к гнезду XI должен быть установлен пластмассовый изолятор, чтобы предотвратить касание антенны корпуса.
Налаживание передатчика
При заведомо исправных деталях и правильном монтаже передатчик не требует особой наладки. Необходимо только убедиться в его работоспособности и, изменяя индуктивность катушки L1, добиться максимальной мощности передатчика.
Для проверки работы мультивибратора надо включить высокоомные наушники между коллектором VT2 и плюсом источника питания. При замыкании кнопки SB1 в наушниках должен прослушиваться звук низкого тона, соответствующий частоте мультивибратора.
Для проверки работоспособности генератора ВЧ необходимо собрать волномер по схеме рис. 2. Схема представляет собой простой детекторный приемник, в котором катушка L1 намотана проводом ПЭВ-1 1. 1,2 и содержит 10 витков с отводом от 3 витка.

Рис. 2. Принципиальная схема волномера для настройки передатчика.
Катушка намотана с шагом 4 мм на пластмассовом каркасе 025 мм. В качестве индикатора используется вольтметр постоянного тока с относительным входным сопротивлением 10 кОм/В или микроамперметр на ток 50. 100мкА.
Волномер собирают на небольшой пластине из фольгированного стеклотекстолита толщиной 1,5 мм. Включив передатчик, располагают от него волномер на расстоянии 50. 60 см. При исправном генераторе ВЧ стрелка волномера отклоняется на некоторый угол от нулевой отметки.
Настраивая генератор ВЧ на частоту 27,12 МГц, сдвигая и раздвигая витки катушки L2, добиваются максимального отклонения стрелки вольтметра.
Максимальную мощность высокочастотных колебаний, излучаемых антенной, получают вращением сердечника катушки L1. Настройка передатчика считается оконченной, если вольтметр волномера на расстоянии 1. 1,2 м от передатчика показывает напряжение не менее 0,05 В.
Схема приемника
Для управления моделью радиолюбители довольно часто используют приемники, построенные по схеме сверхрегенератора. Это связано с тем, что сверхрегенеративный приемник, имея простую конструкцию, обладает очень высокой чувствительностью, порядка 10. 20 мкВ.
Первый каскад приемника представляет собой сверхрегенеративный детектор с самогаше-нием, выполненный на транзисторе VT1. Если на антенну не поступает сигнал, то этот каскад генерирует импульсы высокочастотных колебаний, следующих с частотой 60. 100 кГц. Это и есть частота гашения, которая задается конденсатором С6 и резистором R3.

Рис. 3. Принципиальная схема сверхрегенеративного приемника радиоуправляемой модели.
Усиление выделенного командного сигнала сверхрегенеративным детектором приемника происходит следующим образом. Транзистор VT1 включен по схеме с общей базой и его коллекторный ток пульсирует с частотой гашения.
При отсутствии на входе приемника сигнала, эти импульсы детектируются и создают на резисторе R3 некоторое напряжение. В момент поступления сигнала на приемник продолжительность отдельных импульсов возрастает, что приводит к увеличению напряжения на резисторе R3.
Приемник имеет один входной контур L1, С4, который с помощью сердечника катушки L1 настраивается на частоту передатчика. Связь контура с антенной — емкостная.
Принятый приемником сигнал управления выделяется на резисторе R4. Этот сигнал в 10. 30 раз меньше напряжения частоты гашения.
Для подавления мешающего напряжения с частотой гашения между сверхрегенеративным детектором и усилителем напряжения включен фильтр L3, С7.
При этом на выходе фильтра напряжение частоты гашения в 5. 10 раз меньше амплитуды полезного сигнала. Продетектированный сигнал через разделительный конденсатор С8 подается на базу транзистора VT2, представляющего собой каскад усиления низкой частоты, а далее на электронное реле, собранное на транзисторе ѴТЗ и диодах VD1, VD2.
Усиленный транзистором ѴТЗ сигнал выпрямляется диодами VD1 и VD2. Выпрямленный ток (отрицательной полярности) поступает на базу транзистора ѴТЗ.
При появлении тока на входе электронного реле, коллекторный ток транзистора увеличивается и срабатывает реле К1. В качестве антенны приемника можно использовать штырь длиной 70. 100 см. Максимальная чувствительность сверхрегенеративного приемника устанавливается подбором сопротивления резистора R1.
Детали и монтаж приемника
Монтаж приемника выполняют печатным способом на плате из фольгированного стеклотекстолита толщиной 1,5 мм и размерами 100x65 мм. В приемнике используются резисторы и конденсаторы тех же типов, что и в передатчике.
Катушка контура сверхрегенератора L1 имеет 8 витков провода ПЭЛШО 0,35, намотанных виток к витку на полистироловом каркасе 06,5 мм, с подстроечным ферритовым сердечником марки 100НН диаметром 2,7 мм и длиной 8 мм. Дроссели имеют индуктивность: L2 — 8 мкГн, a L3 — 0,07. 0,1 мкГн.
Электромагнитное реле К1 типа РЭС-6 с обмоткой сопротивлением 200 Ом.
Настройка приемника
Настройку приемника начинают с сверхрегенеративного каскада. Подключают высокоомные наушники параллельно конденсатору С7 и включают питание. Появившийся в наушниках шум свидетельствует об исправной работе сверхрегенеративного детектора.
Изменением сопротивления резистора R1 добиваются максимального шума в наушниках. Каскад усиления напряжения на транзисторе VT2 и электронное реле особой наладки не требуют.
Подбором сопротивления резистора R7 добиваются чувствительности приемника порядка 20 мкВ. Окончательная настройка приемника производится совместно с передатчиком.
Если в приемнике параллельно обмотке реле К1 подключить наушники и включить передатчик, то в наушниках должен прослушиваться громкий шум. Настройка приемника на частоту передатчика приводит к пропаданию шума в наушниках и срабатыванию реле.
Многие хотели собрать простую схему радиоуправления, но чтоб была многофункциональна и на достаточно большое расстояние. Я все-таки эту схему собрал, потратив на неё почти месяц. На платах дорожки рисовал от руки, так как принтер не пропечатывает такие тонкие. На фотографии приемника светодиоды с не подрезанными выводами - припаял их только для демонстрации работы радиоуправления. В дальнейшем их отпаяю и соберу радиоуправляемый самолет.

Схема аппаратуры радиоуправления состоит всего из двух микросхем: трансивера MRF49XA и микроконтроллера PIC16F628A. Детали в принципе доступные, но для меня проблемой был трансивер, пришлось через интернет заказывать. Архив с прошивкой и платой качайте здесь. Подробнеее об устройстве:
MRF49XA - малогабаритный трансивер, имеющий возможность работать в трех частотных диапазонах.
- Низкочастотный диапазон: 430,24 - 439,75 Mгц (шаг 2,5 кГц).
- Высокочастотный диапазон А : 860,48 - 879,51 МГц (шаг 5 кГц).
- Высокочастотный диапазон Б : 900,72 - 929,27 МГц (шаг 7,5 кГц).
Границы диапазонов указаны при условии применения опорного кварца частотой 10 МГц.
Принципиальная схема передатчика:

В схеме TX довольно мало деталей. И она очень стабильная, более того даже не требует настройки, работает сразу после сборки. Дистанция (согласно источнику) около 200 метров.


Теперь к приемнику. Блок RX выполнен по аналогичной схеме, различия только в светодиодах, прошивках и кнопках. Параметры 10-ти командного блока радиоуправления:
Передатчик:
Мощность - 10 мВт
Напряжение питания 2,2 - 3,8 В (согласно даташиту на м/с, на практике нормально работает до 5 вольт).
Ток, потребляемый в режиме передачи - 25 мА.
Ток покоя - 25 мкА.
Скорость данных - 1кбит/сек.
Всегда передается целое количество пакетов данных.
Модуляция - FSK.
Помехоустойчивое кодирование, передача контрольной суммы.
Приемник:
Чувствительность - 0,7 мкВ.
Напряжение питания 2,2 - 3,8 В (согласно даташиту на микросхему, на практике нормально работает до 5 вольт).
Постоянный потребляемый ток - 12 мА.
Скорость данных до 2 кбит/сек. Ограничена программно.
Модуляция - FSK.
Помехоустойчивое кодирование, подсчет контрольной суммы при приеме.

Преимущества данной схемы
- Возможность нажатия в любой комбинации любого количества кнопок передатчика одновременно. Приемник при этом отобразит светодиодами нажатые кнопки в реальном режиме. Говоря проще, пока нажата кнопка (или комбинация кнопок) на передающей части, на приемной части горит, соответствующий светодиод (или комбинация светодиодов).
- Во время подачи питания на приемник и передатчик, они уходят в тест режим на 3 секунды. В это время ничего не работает, по истечению 3-х секунд обе схемы готовы к работе.
- Кнопка (или комбинация кнопок) отпускается - соответсвующие светодиоды сразу же гаснут. Идеально подходит для радиоуправления различными игрушками - катерами, самолётами, автомобилями. Либо можно использовать, как блок дистанционного управления различными исполнительными устройствами на производстве.

На печатной плате передатчика кнопки расположены в один ряд, но я решил собрать что-то наподобии пульта на отдельной плате.

Питаются оба модуля от аккумуляторов 3,7В. У приемника, который потребляет заметно меньше тока, аккумулятор от электронной сигареты, у передатчика - от моего любимого телефона)) Схему, найденную на сайте вртп , собрал и испытал: [)еНиС
Форум по обсуждению материала РАДИОУПРАВЛЕНИЕ НА МИКРОКОНТРОЛЛЕРЕ

Что такое OLED, MiniLED и MicroLED телевизоры - краткий обзор и сравнение технологий.

Про использование технологии беспроводного питания различных устройств.

В каком направлении течет ток - от плюса к минусу или наоборот? Занимательная теория сути электричества.

Переделываем игрушку обычный трактор в радиоуправляемый - фотографии процесса и получившийся результат.

– аналоговые схемы радиоуправления;
– разработки на микросхемах;
– схемы радиоуправления на микроконтроллерах;
– готовые модули приемник – передатчик;
– самодельные модули приемник – передатчик;
– применяемые антенны;
– вопросы настройки самодельных модулей
– и многое другое, что связано с радиоуправлением.
Подборка статей Владимира Днищенко для конструкторов аппаратуры радиоуправления:
Книга Владимира Днищенко для конструкторов аппаратуры радиоуправления:
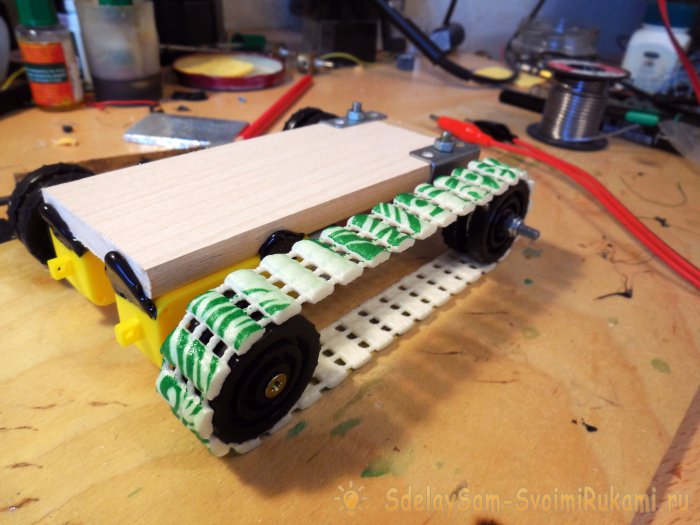
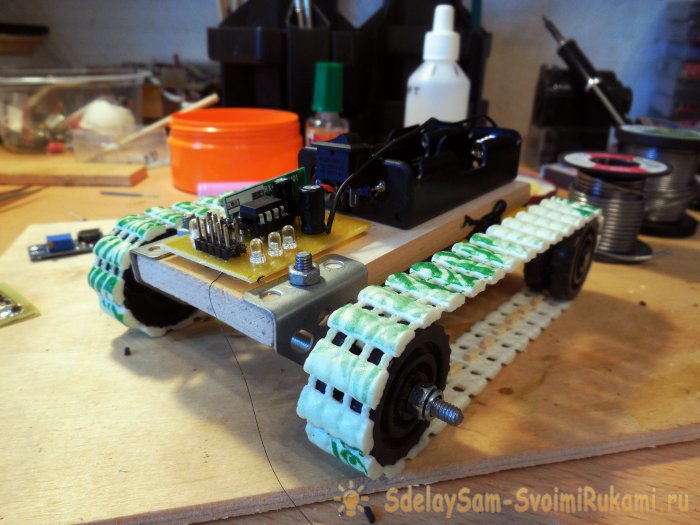
Рассмотрим создание машинки на гусеничном ходу с довольно элементарной конструкцией, собрать которую можно буквально за пару вечеров. Всю конструкцию условно можно разделить на две части – гусеничное шасси и электрическая часть, которая будет обеспечивать дистанционное управление машинкой с пульта.
Изготовление шасси
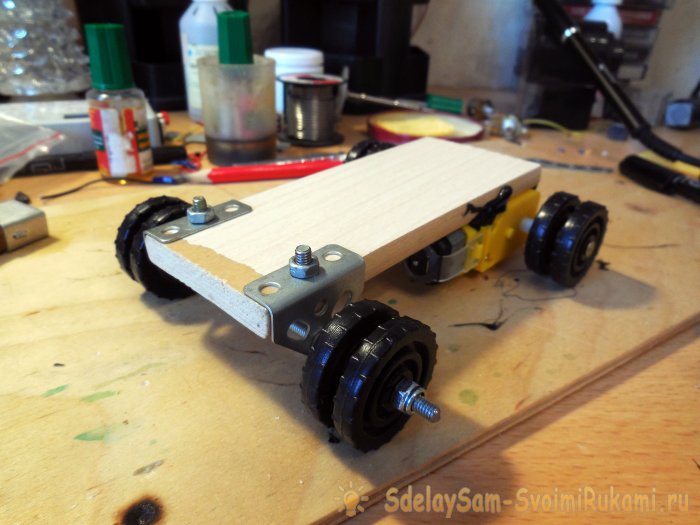
Каждый редуктор имеет выход на два вала, по разные стороны корпуса – для гусеничного шасси задействован будет только один вал с каждого мотора, второй можно удалить вовсе либо оставить на случай, если эти моторы ещё понадобятся в других проектах. На валы необходимо закрепить колёса – сделать это площе всего, вкрутив саморез в сам вал (внутри он полый), таким образом, колёса хорошо зажмутся. Для дополнительной фиксации, и чтобы не раскрутился саморез, можно обильно смазать соединение клеем. Обратите внимание, что колесо двойное – между каждым из колёс делается зазор примерно 3-4 мм, в дальнейшем с его помощью будет фиксироваться гусеница.

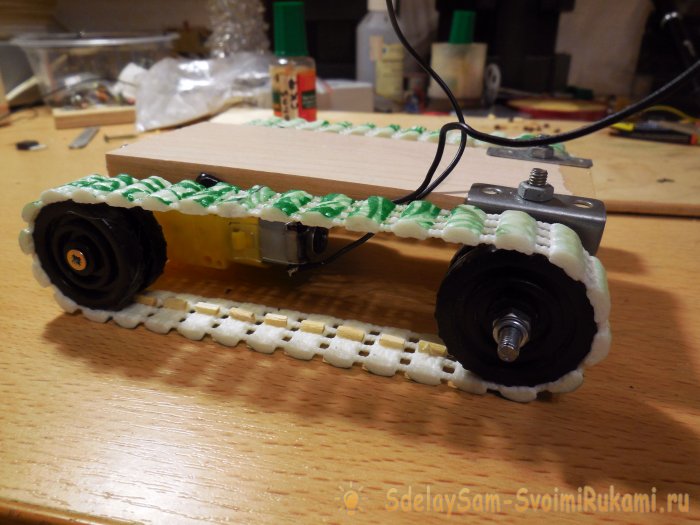
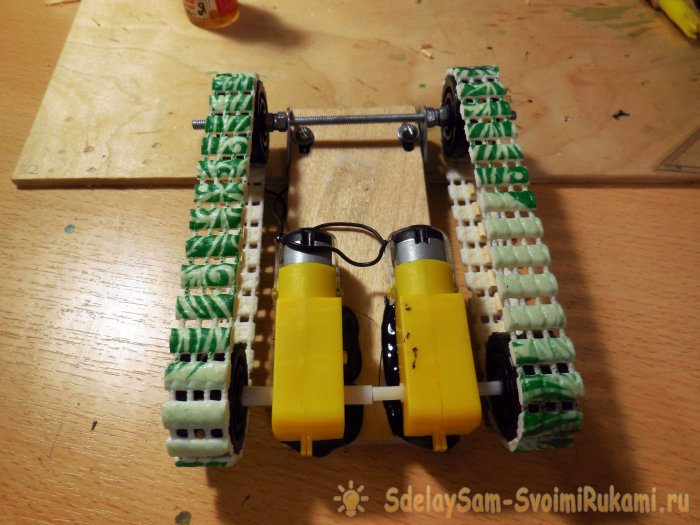
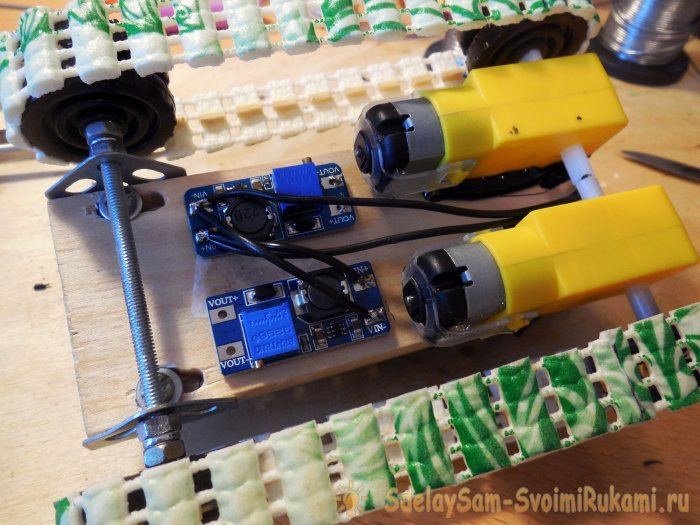
Моторы закрепляются на кусочке прочной фанеры, её размер можно выбрать произвольно, в зависимости от желаемых размеров машинки. Каких-либо удобных мест для крепления данные мотор-редукторы не предусматривают, поэтому зафиксировал я их с помощью термоклея – хорошие клеевые стержни обеспечивают отличное качество соединения, как показал опыт.
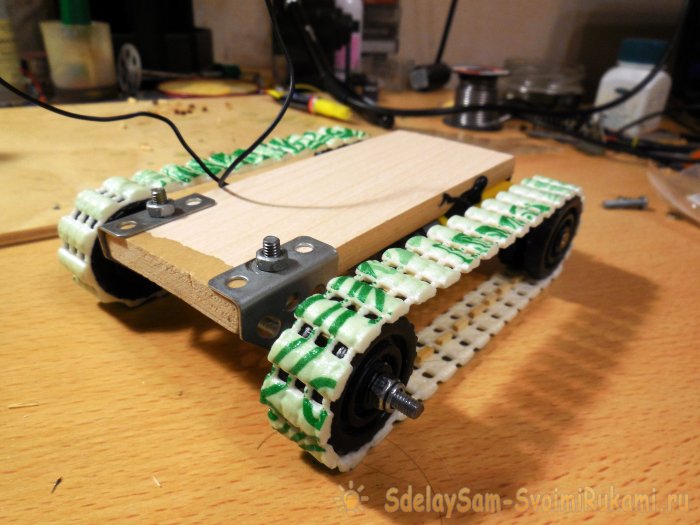
Далее в противоположной стороне от моторов необходимо закрепить уголки для оси передних колёс. Для этого очень рекомендую использовать детали от детского железного конструктора – там можно найти готовые уголки с отверстиями. При сверлении отверстия в фанерке нужно учитывать, что в дальнейшем понадобится регулировка натяжения гусениц, поэтому необходимо просверлить ряд отверстий длиной примерно 1-1,5 см, которые затем соединить в одну продолговатую прорезь. Таким образом, вся передняя ось будет двигаться взад-вперёд, фиксируясь болтами в нужном положении.
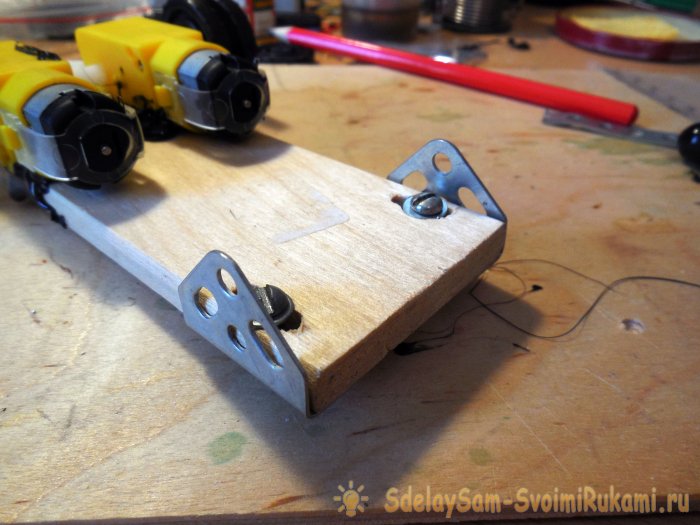
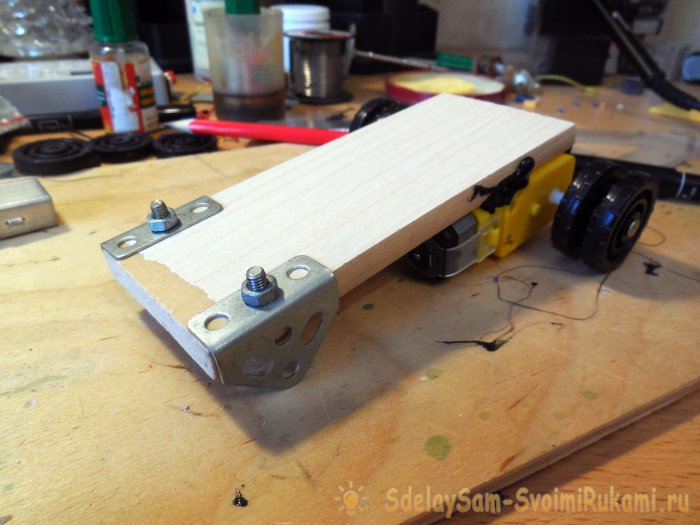
В отверстия в уголках продевается шпилька, удобно использовать м4, она даёт достаточную жёсткость и при этом подходит под отверстия в деталях железного конструктора. Шпильку необходимо жёстко закрепить на уголках, удобно использовать для этого гайки с фиксацией, они не раскрутятся сами собой, когда машинка начнёт ездить. По бокам устанавливаются те же двойные колёса, что и сзади, с точном таким же зазором. Колёса должны свободно вращаться на оси, обеспечить это можно теми же гайками с фиксацией. Обратите внимание, что левые и правые колёса должны вращаться независимо друг от друга. Такие колёса я взял в том же железном конструкторе, однако можно вырезать аналогичные и из пластика, либо из плотного картона, если сложить его в несколько слоёв и склеить.

Изготовление гусениц

Затем необходимо приложить ленту к закреплённым на шасси колёсам и отрезать её по необходимой длине, затем концы ленты склеиваются суперклеем. После того, как клей высохнет, можно примерить гусеницу на шасси и даже включить мотор – гусеница будет вращаться, однако быстро спадёт с колёс.
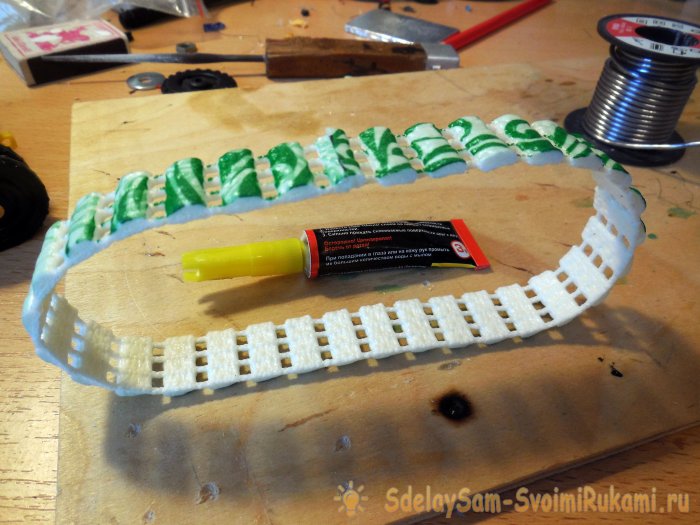

Все те же действия нужно сделать со второй гусеницей. После наклеивания спичек гусеницы можно считать готовыми – теперь они надеются на шасси и уже можно проверить, как поедет будущая машинка, подав напряжение с аккумулятора напрямую на оба мотора. При необходимости нужно отрегулировать силу натяжения – слишком слабая гусеница будет проворачиваться или спадать, а слишком сильно натянутая будет туго вращаться, оказывая дополнительную нагрузку на мотор.
Электрическая часть
Изготовление пульта
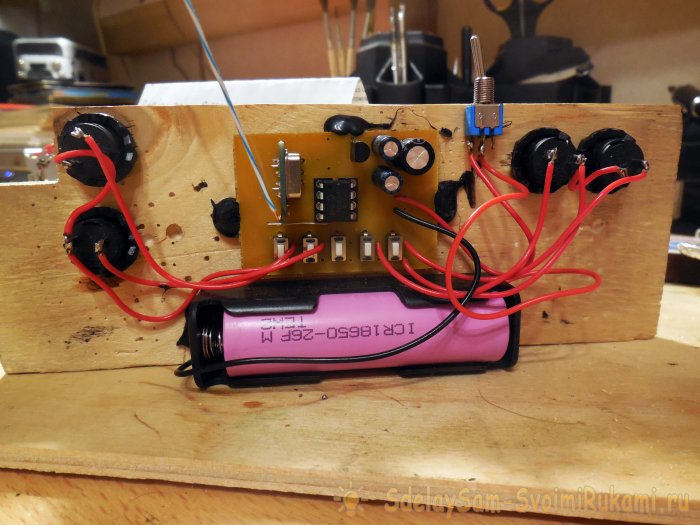
Как один из вариантов – использовать можно готовый пульт от какой-нибудь сломанной/ненужной радиоуправляемой игрушки, если внутри него достаточно места для установки платы кодера. Либо можно изготовить свой пульт, как я и сделал. В качестве основы применил ещё один обрезок фанеры, смонтировав на нём холдер для аккумулятора 18650, плату кодера с модулем-приёмником, а также 4 кнопки, расположив их по максимальному удобству управления. Обратите внимание, что плата кодера уже содержит посадочные места для кнопок на плату – их установка необязательна, разве что для проверки работоспособности после сборки. Рабочие кнопки выводятся с платы на проводах, как на фотографиях ниже.

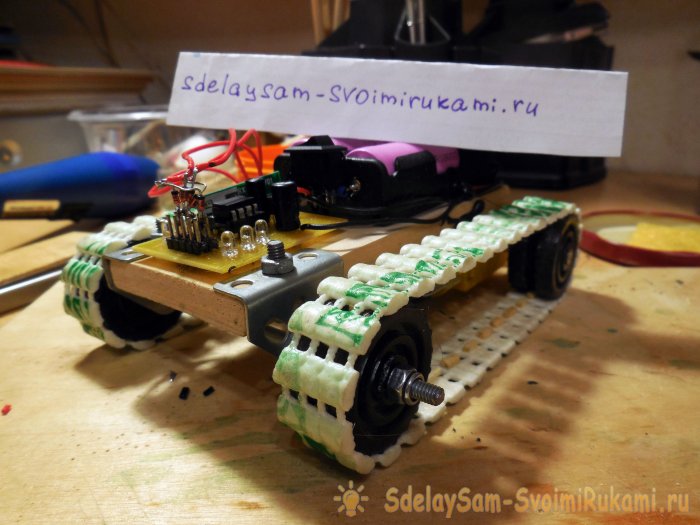
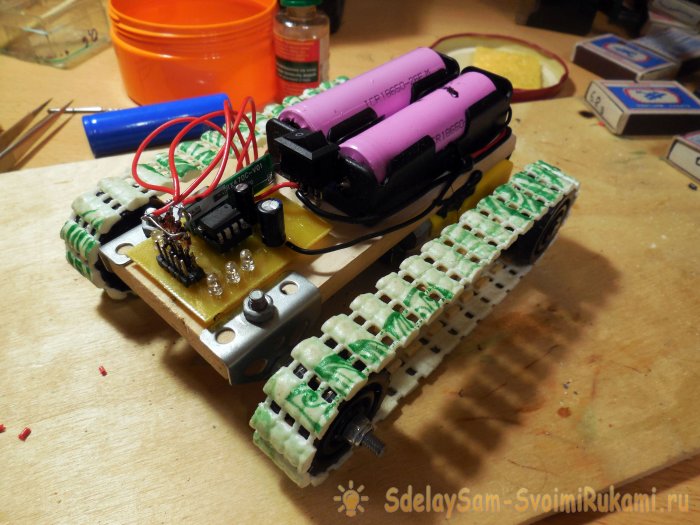
Монтаж электроники на шасси
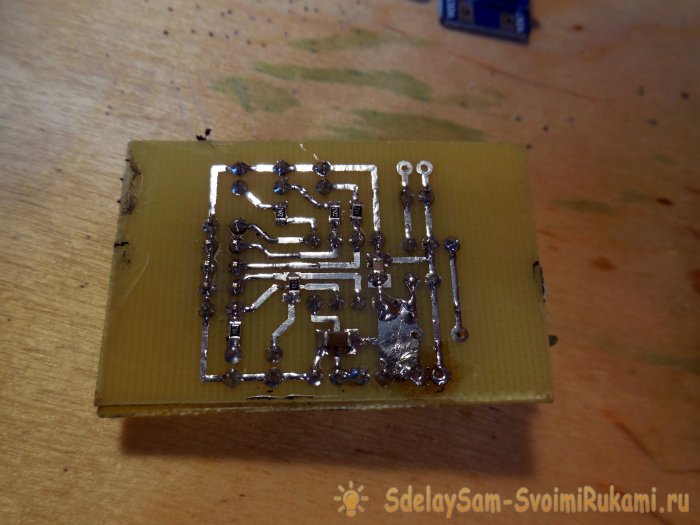
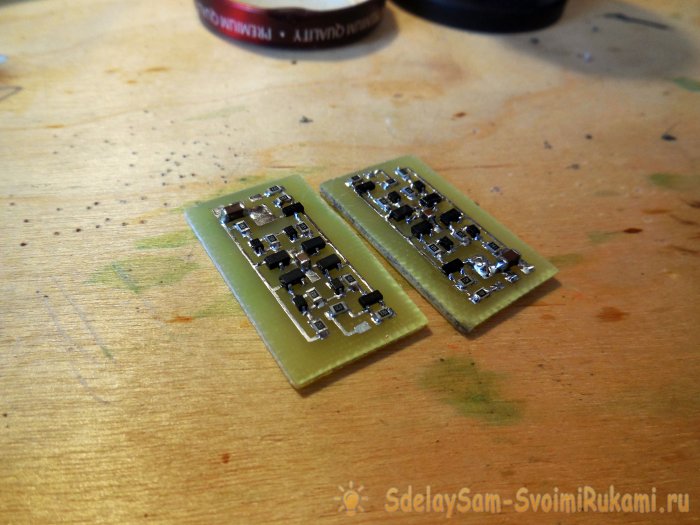
Подробное фото платы декодера. Обратите внимание, что она, так же, как и плата кодера, имеет несколько дополнительных конденсаторов по питанию – они точно не будут лишними в устройствах с микроконтроллерами.
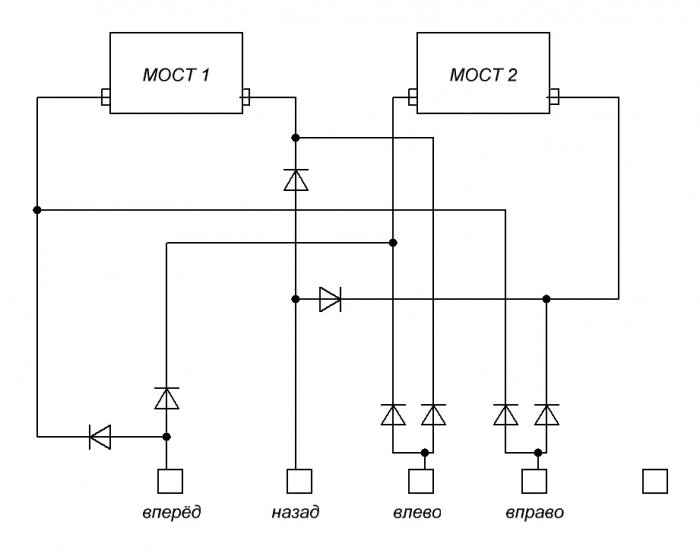
Сборка мостовой схемы
Казалось бы – для чего нужна какая-то мостовая схема, ведь достаточно лишь с помощью ключа подавать напряжение на моторы. И она действительно не нужна в том случае, если машинке не требуется задний ход – а практика показывает, что без него совсем неинтересно. Таким образом, необходимо собрать небольшую дополнительную схемку, которая обеспечит смену полярности для мотора. Меняется полярность – меняется направление движения.
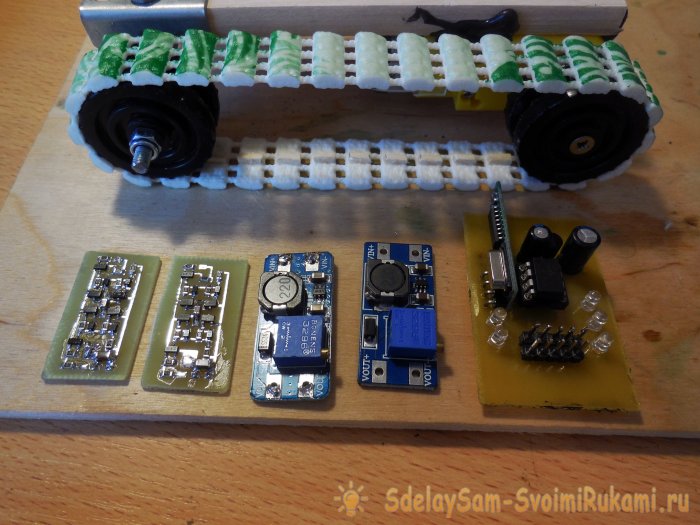
К данной схеме подключается двигатель, а также она содержит два входа – in1 и in2, подали 3-5 вольт на один вход – мотор вращается в одну сторону, подали 3-5 вольт на другой – мотор вращается уже в другую сторону. Если же напряжение не подаётся ни на один вход, либо подаётся на оба входа сразу – мотор не вращается, вот такая простая логика работы. На схеме имеется 4 полевых транзистора, которые будут коммутировать мотор, поэтому они должны быть рассчитаны на достаточно большой ток. Два из них N-канальные, можно использовать АО3400, другие два P-канальные, подойдут АО3401. Также на схеме присутствуют два биполярных NPN транзистора, подойдут BC847 или любые другие аналогичные. Для того, чтобы не занимать много места на шасси рекомендую собрать эту схему именно на SMD-компонентах. Диоды – любые понравившиеся, например, 1N4148W. На вход питания этой схемы (обозначен как 12 V) подаётся напряжение с преобразователя. Обратите внимание, что схему нужно собрать в двух экземплярах – для левого и правого мотора, соответственно питаться они будут с одного и со второго преобразователя. Фото собранных плат ниже.

Теперь можно приступать непосредственно к монтажу – и первым делом стоит установить на верхнюю часть шасси пару холдеров под аккумуляторы 18650, именно от них будет питаться вся электроника, аккумуляторы соединяются параллельно.

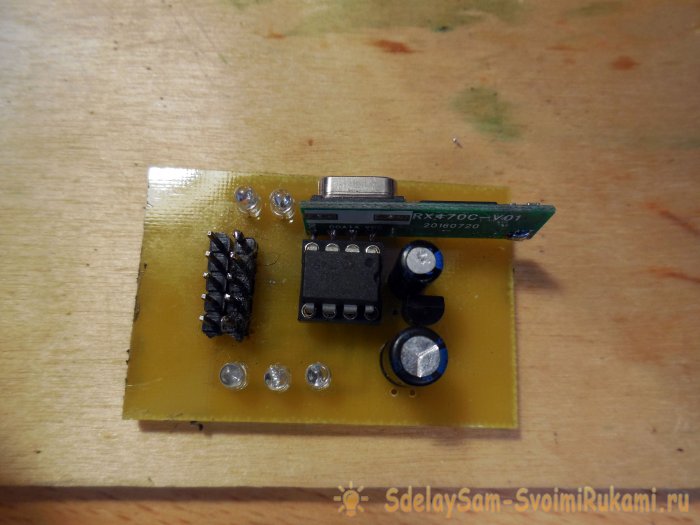
Перед аккумуляторами, в передней части, устанавливается плата декодера, её сразу можно подключить через выключатель к контактам холдеров. Для удобства на этой плате дополнительно установлены 5 светодиодов – при нажатии на клавиши пульта будут загораться соответствующие светодиоды.
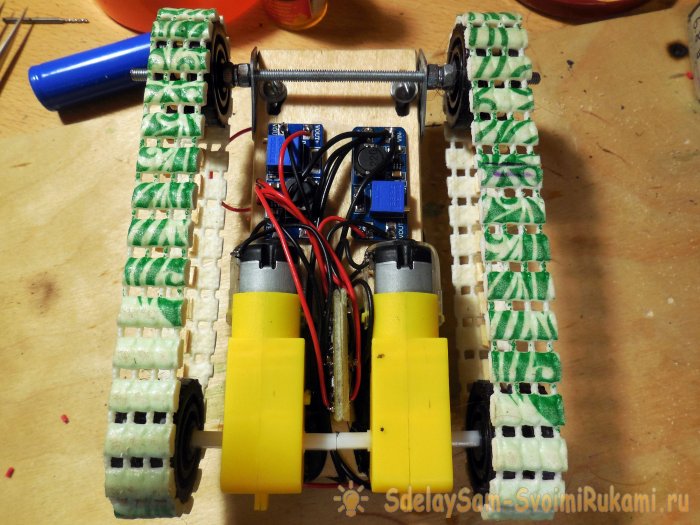
На нижнюю часть, под шасси, крепятся пара преобразователей и пара плат-мостов. Сразу всё соединяется проводами – входы преобразователей через выключатель к холдерам, выходы преобразователей на питание плат мостов, а выходы мостов, в свою очередь, уже к моторам. Следует учитывать, что моторы под нагрузкой могут потреблять достаточно большой ток, соответственно на входе преобразователей потребляемый ток будет ещё примерно в 2 раза больше и в некоторые моменты может достигать 1-1,5 ампера, поэтому нужно подводить питание достаточно толстыми проводами.
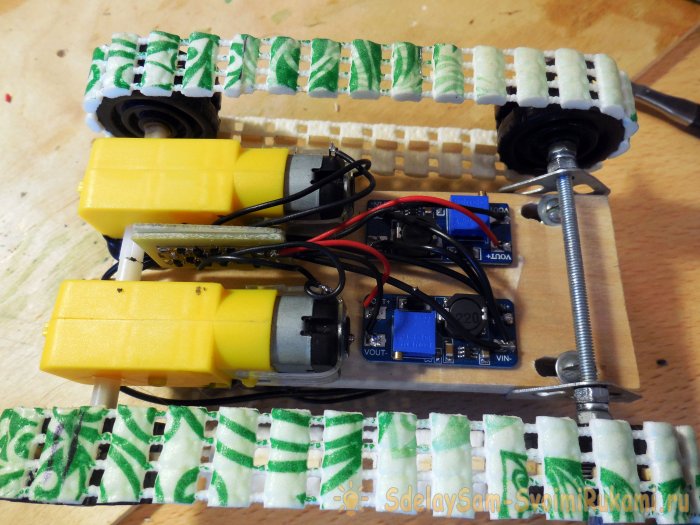
Снизу показаны выходы декодера, при этом один из них свободен, его можно задействовать для других действий. Диоды здесь можно использовать те же 1N4148, припаять их навесным монтажом прямо на выходах декодера.
Испытания
Смотрите видео
Читайте также: