
Магнитный модулятор своими руками
Добавил пользователь Alex Обновлено: 18.09.2024
Магнитный усилитель — это статический аппарат, предназначенный для управления величиной переменного тока посредством слабого постоянного тока. Применяется в схемах автоматического регулирования электродвигателей переменного тока.
Работа магнитного усилителя основана на нелинейности характеристики намагничивания магнитопровода. На крайних стержнях магнитного усилителя находится рабочая обмотка, которая состоит из двух катушек, соединённых последовательно. На среднем стержне размещается обмотка управления из большого количества витков W=. Если ток в неё не подаётся, а к рабочей обмотке, соединённой последовательно с нагрузкой, подведено переменное напряжение U~, то из-за малого количества витков W~ магнитопровод не насыщается, и почти всё напряжение падает на реактивном сопротивлении рабочих обмоток Z~. На нагрузке в этом случае выделяется малая мощность.
Если теперь пропустить по обмотке управления ток Iу, то даже при небольшом его значении (из-за большого W=), возникает насыщение магнитопровода. В результате реактивное сопротивление рабочей обмотки резко уменьшается, а величина тока в цепи — увеличивается. Таким образом, посредством малых сигналов в обмотке управления можно управлять значительной величиной мощности в рабочей цепи магнитного усилителя.
В простейшем случае магнитный усилитель — это управляемая постоянным током индуктивность, которая включается в цепь переменного тока последовательно с нагрузкой. При большой индуктивности ток в последовательной цепи и в нагрузке маленький, при малой индуктивности ток в последовательной цепи и в нагрузке большой. Существует целый ряд разработок, в которых магнитный усилитель используется для удвоения частоты, бесконтактного переключения токов (бесконтактные реле), для стабилизации напряжения питания, для модуляции сигналов ВЧ сигналами НЧ.
В последнее время магнитный усилитель был частично потеснён полупроводниковыми приборами, но в ряде применений по-прежнему не имеет конкурентов.
Основное назначение — управление силовым электроприводом (распространены в строительной технике), По-прежнему магнитные усилители используются в системах, измеряющих постоянные токи от тензодатчиков. Магнитный усилитель позволяет бесконтактно измерять постоянные токи в линиях электропередач. В последнее время для этого всё чаще применяют более компактные датчики Холла.
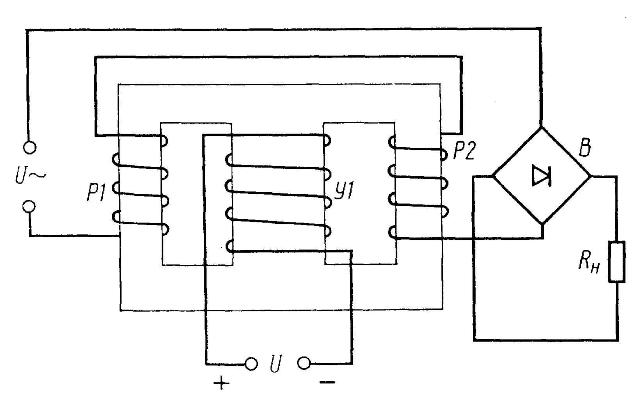
Схема магнитного усилителя
Сердечник изготавливают из электротехнической стали или других ферромагнитных материалов, например из пермаллоя. Катушки Р1 и Р2 рабочей обмотки усилителя включены в цепь переменного тока. В обмотку управления У1 подводится постоянный ток. Рабочая обмотка магнитного усилителя представляет собой индуктивное сопротивление.
При описании возбудителей с расщепленными полюсами подробно рассматривался процесс намагничивания ферромагнитных сердечников. Если вначале с увеличением магнитодвижущей силы пропорционально ей возрастают магнитный поток и магнитная индукция, то при наступлении магнитного насыщения материала сердечника практически прекращается изменение магнитной индукции, как бы ни увеличивали мы магнитодвижущую силу за счет повышения величины тока в обмотке. Явление магнитного насыщения ферромагнитных материалов использовано в магнитном усилителе.
Вследствие большого индуктивного сопротивления рабочей обмотки при отсутствии тока в обмотке управления сила тока в цепи рабочей обмотки будет весьма невелика. Если по обмотке управления пропустить постоянный ток и довести сердечник до магнитного насыщения, то переменный ток рабочих обмоток уже не будет создавать дополнительного изменяющегося магнитного потока. Индуктивное сопротивление рабочих обмоток резко снизится, и в соответствии с законом Ома ток, протекающий по этим обмоткам, значительно увеличится. При постепенном увеличении тока в обмотке управления также постепенно снижается переменный магнитный поток, создаваемый рабочими обмотками, и нарастает ток в цепи этих обмоток.
Магнитный усилитель можно рассматривать и как регулируемый резистор в цепи переменного тока, изменение сопротивления которого производится с помощью управляющего постоянного тока.
Нагрузка Rн т. е. объект, в котором ток регулируется с помощью магнитного усилителя, включается в цепь рабочих обмоток. Нагрузкой магнитных усилителей часто являются обмотки возбуждения генераторов. Чтобы через нагрузку проходил постоянный, а не переменный ток, в цепь включается выпрямительный мост В.
Отношение тока нагрузки к току в обмотке управления называют коэффициентом усиления магнитного усилителя по току, а отношение мощностей нагрузки и управления — коэффициентом усиления по мощности. Коэффициенты усиления обычных магнитных усилителей обычно лежат в пределах от 50 до 200.
Магнитные усилители в металлообрабатывающих станках
Магнитный усилитель коммутирует электрическую цепь тока изменением в широких пределах своего индуктивного электрического сопротивления, величина которого зависит от степени насыщения магнитопровода.
Магнитные усилители нашли широкое применение в электроприводах металлорежущих станков из-за их надежности и большого срока службы (он считается одним из самых надежных элементов систем автоматики), отсутствия подвижных частей, возможности исполнения магнитных усилителей мощностью от долей ватта до сотен киловатт, большой прочности и стойкости по отношению к вибрациям и ударной нагрузке. Кроме этого у благодаря магнитным усилителям можно легко осуществить суммирование сигналов. Они имеют большой коэффициент усиления. В магнитных усилителях отсутствует электрическая связь между входными и выходными цепями.
Принцип действия магнитного усилителя основан на использовании нелинейности кривой намагничивания ферромагнитного материала. При намагничивании постоянным током сердечник усилителя насыщается и индуктивность рабочих обмоток переменного тока усилителя уменьшается. Рабочие обмотки обычно включаются последовательно с нагрузкой. Поэтому напряжение, которое до насыщения сердечника было приложено к рабочим обмоткам усилителя в момент насыщения, прикладывается к нагрузке.
Ток нагрузки регулируют изменением тока в обмотке подмагничивания магнитного усилителя. Обмотка смещения служит для создания начального подмагничивания, необходимого для того чтобы ток в нагрузке изменялся различным образом в зависимости от знака полярности сигнала управления, а также для выбора точки на прямолинейном участке характеристики. Обмотка обратной связи предназначена для получения требуемой формы выходных характеристик.
Конструктивно магнитный усилитель представляет собой сердечник из листового ферромагнитного материала, на который намотаны обмотки переменного и постоянного тока. Для устранения наводок э. д. с. переменного тока цепи обмоток постоянного тока обмотки переменного ока намотаны отдельно на сердечниках, а обмотки постоянного тока охватывают оба сердечника.
Схема простейшего магнитного усилителя
Магнитный усилитель может иметь несколько обмоток управления. В этом случае в рабочем режиме ток в нагрузке будет определяться суммарным током управления. То есть он может быть использован как сумматор электрических сигналов не связанных между собой (суммируются постоянные сигналы).
Магнитные усилители могут быть как нереверсивные, так и реверсивные. В нереверсивных магнитных усилителях изменение полярности сигнала управления не вызывает изменения фазы и знака тока нагрузки.
Сердечники магнитных усилителей изготовляют как из трансформаторной стали, так и из пермаллоя, причем трансформаторную сталь применяют при мощности магнитного усилителя, большей 1 Вт. Величина магнитной индукции в сердечнике из трансформаторной стали достигает 0,8 - 1,0 Т. Коэффициент усиления таких магнитных усилителей составляет от 10 до 1000.
Пермаллой применяют в магнитных усилителях, мощность которых меньше 1 В. Прямоугольный характер петли гистерезиса для пермаллоя позволяет получить коэффициент усиления от 1000 до 10 000 и выше.
Сердечник магнитного усилителя шихтуют из отдельных пластин, как сердечники дросселей или трансформаторов. Широкое распространение получили магнитные усилители на тороидальных сердечниках, которые, несмотря на технологические трудности их изготовления, обладают целым рядом преимуществ и первое из них - отсутствие воздушных зазоров, что улучшает характеристики магнитного усилителя.
Широко распространены следующие схемы магнитных усилителей: однотактные и двухтактные, реверсивные и нереверсивные, однофазные и многофазные.
В металлорежущих (и не только металлорежущих) станках можно встретить очень большое разнообразие конструкций магнитных усилителей: однофазные серии УМ-1П, трехфазные серии УМ-ЗП, собранные на шести П-образных сердечниках из стали марки Э310, однофазные серии ТУМ на тороидальном сердечнике, блоки магнитных усилителей серии БД, содержащие, кроме магнитных усилителей, понижающие трансформаторы, диоды и резисторы, собранные на одной панели. Системы электропривода могут быть построены на любых усилителях из этих серий.
Обмоточная схема магнитного усилителя УМ-1П
Кроме этого часто на различных станках применяются комплектные приводы с магнитными усилителями и двигателями постоянного тока, например очень распространенный привод с магнитными усилителями ПМУ. Но об этом мы обязательно поговорим следующий раз. Кроме этого, в следующем посте остановимся на методах наладки магнитных усилителей, затронем и ряд других вопросов, интересных всем кто постоянно сталкивается или собирается в будущем столкнуться в работе с магнитными усилителями.
Комплектные электроприводы с магнитными усилителями
Несмотря на то, что в современном электроприводе с успехом используются статические преобразователи (тиристоры, силовые транзисторы, IGBT-модули), на наших промышленных предприятиях все еще очень часто можно встретить электродвигатели и генераторы постоянного тока, работающие в комплекте с магнитными усилителями.
Магнитные усилители самое широкое распространение получили в промышленном оборудовании еще в 50-х годах. В целом, в эпоху дополупроводниковой техники существовала следующая тенденция – асинхронный и синхронный (для больших мощностей) привод применялся в нерегулируемом электроприводе и привод постоянного тока с электромашинным или статическим (тиритронный или ртутный выпрямители, магнитный усилитель) для регулируемого.
В настоящее время наиболее часто можно на отечественных предприятиях в схемах электрооборудования станков, машин и установок можно встретить комплектные электроприводы постоянного тока с магнитными усилителями серии ПМУ.
ПМУ - привод с магнитными усилителями и селеновыми выпрямителями. Диапазон регулирования скорости двигателя 10:1. Регулирование производится изменением напряжения на якоре вниз от номинальной частоты вращения двигателя. Система регулирования автоматическая с обратной связью по э. д с. двигателя, без тахогенератора и промежуточного усилителя. Мощность привода от 0,1 до 2 кВт. Привод предназначен для выпрямленное напряжение на выходе моста составляет от 340 до 380 В. Для получения достаточно жестких характеристик привода в схему введены отрицательные обратные связи по току и напряжению.
Каждый привод серии ПМУ представляет собой комплект, состоящий из блока питания, выпрямителей, магнитных усилителей, двигателя постоянного тока и задатчика скорости.
Привод работает следующим образом. Напряжение, подводимое к двигателю, автоматически следует за сигналом, зависящим от изменения его частоты вращения. При снижении частоты вращения двигателя напряжение возрастает и наоборот: напряжение поддерживает с заданной точностью величину частоты вращения независимо от изменения нагрузки и других возмущающих факторов.
Влияние различных возмущающих факторов на частоту вращения компенсирует реактивное сопротивление рабочей обмотки магнитного усилителя: при возрастании нагрузки ток в цепи якоря увеличивается, что вызывает уменьшение сопротивления рабочей обмотки магнитного усилителя. Вследствие снижения сопротивления рабочей обмотки напряжение на якоре двигателя возрастает, ток в обмотках увеличивается, что еще больше уменьшает полное сопротивление рабочих обмоток усилителя. В результате суммарного снижения сопротивления рабочей обмотки напряжение на якоре двигателя возрастает, что компенсирует снижение частоты вращения двигателя. Необходимая частота вращения двигателя устанавливается с помощью задатчика Р и резисторов R1 - R4.
ПМУ-М аналогична серии ПМУ, но магнитные усилители собраны на П-образных сердечниках. Мощность привода ПМУ-М от 0,1 до 7 кВт.
В приводах серии ПМУ-М применена система автоматического регулирования частоты вращения с обратными связями по напряжению и току якоря двигателя. Магнитный усилитель имеет две группы обмоток управления. По одной из них протекает ток управления, являющийся алгебраической суммой тока задатчика и токов обратных связей, другая (обмотка смещения) - служит для выбора рабочей точки на прямолинейном участке характеристики магнитного усилителя.
Для защиты от недопустимо больших значений тока якоря приводы ПМУ-М габаритов с 8 по 11 снабжены узлом ограничения тока. При превышении током якоря допустимых значений срабатывает реле максимального тока, его размыкающий контакт размыкается и обрывает цепь питания обмотки управления. Так как обмотка смещения остается замкнутой, то магнитный усилитель запирается и ток якоря снижается. Действие схемы привода ПМУ-М аналогично действию схемы привода ПМУ.
ПМУ-П — приводы повышенной точности и расширенного диапазона регулирования 100 : 1. Система регулирования автоматическая с обратной связью по частоте вращения, которая осуществляется с помощью тахогенератора и промежуточного полупроводникового усилителя. Частота вращения двигателя регулируется изменением напряжения на якоре.
Кстати, магнитные усилители могут быть также использованы для регулирования напряжения на зажимах асинхронного двигателя, а также в качестве бесконтактных пускателей.
Войти
Авторизуясь в LiveJournal с помощью стороннего сервиса вы принимаете условия Пользовательского соглашения LiveJournal
Магнитные усилители
Что-то говорить своими словами о магнитных усилителях смысла нет, когда есть такие замечательные книги. Разве что очень кратко. Представим себе дроссель с ферромагнитным сердечником, который включен в цепь переменного тока. Этот дроссель представляет собой реактивное сопротивление, которое ограничивает ток нагрузки. Сопротивление может быть довольно большим, тогда ток в нагрузке будет близким к нулю, нагрузку можно считать выключенной. Если теперь каким-то образом начать намагничивать сердечник, то можно подойти к его насыщению. При этом магнитная проницаемость уменьшится, одновременно уменьшится индуктивность и реактивное сопротивление. Ток нагрузки увеличится. Дроссель с насыщенным сердечником представляет собой очень незначительное сопротивление, его можно сравнить с открытым регулирующим элементом обычного усилителя. Для намагничивания сердечника обычно служит отдельная обмотка, которая называется управляющей. Это очень упрощенное представление, подробности можно узнать из книги.
Может показаться невероятным, но магнитный усилитель сегодня есть почти в каждом доме. Именно с его использованием чаще всего выполнен канал +3.3 В в недорогом компьютерном блоке питания формата ATX. Стоило мне протянуть руку и достать с полки плату старого компьютерного БП, как магнитный усилитель оказался прямо перед глазами.

Схемотехника узла формирования напряжения +3.3 В обычно следующая: используются те же отводы вторичной обмотки, что и для канала +5 В. Но выпрямитель канала +3.3 В подключен через насыщающийся дроссель. На фото это L3, он совсем маленький. В качестве опорного источника и усилителя ошибки служит микросхема IC6 типа TL431, в зависимости от выходного напряжения регулируется постоянная составляющая тока дросселя. И делает это маломощный транзистор Q4, в то время как ток нагрузки канала +3.3 В может достигать 10 А и более.
Фактически, в этой схеме насыщающийся дроссель работает как ключ. Не буду сегодня углубляться в технические подробности, пост будет больше гуманитарный. Подробно принцип работы изложен в материалах юнитродовских семинаров, а конкретно в документе slup129.pdf. Перевода этого документа я не встречал, были мысли его сделать, но, судя по всему, это работа в корзину.
Upd: частичный перевод статьи все-таки есть.
Конечно, такая реализация – не единственная для канала +3.3 В. Иногда это напряжение получают с помощью полноценного ключевого понижающего преобразователя, но такое решение дорогое. Иногда основной трансформатор имеет дополнительные отводы вторичной обмотки, тогда канал +3.3 В построен аналогично каналам +5 В и +12 В, осуществляется их групповая стабилизация. Надо сказать, что при использовании магнитного усилителя канал +3.3 В имеет отдельную стабилизацию, которая работает значительно лучше групповой стабилизации. Групповая стабилизация, вместе с ее главным элементом, дросселем групповой стабилизации (ДГС) – благодатная почва для мифов. Про это я уже неоднократно писал. Считается, что ДГС улучшает межканальную стабилизацию даже в случае разных, но стационарных нагрузок на каналы. В действительности это не так, ДГС лишь улучшает реакцию на скачок нагрузки, и всё. Правда, здесь требуется существенное уточнение – это справедливо для случая, когда все каналы достаточно нагружены, чтобы ток в дросселе был непрерывным. Если же какой-то канал работает с очень малой нагрузкой, тут действие ДГС будет сказываться даже в стационарных условиях, но механизм его другой. Вообще, компьютерный БП проектировали инопланетяне, раз там так много непонятного. Например, обычно вызывает затруднение вопрос, почему на всех каналах после ДГС стоит фильтрующая емкость, а уже после нее идет второе звено LC-фильтра, но на одном канале (иногда это +5 В, иногда + 12 В) после ДГС емкости нет, а сразу стоит небольшая индуктивность.
Если с магнитным усилителем все так хорошо, то почему его не применяют наши разработчики импульсных источников питания, ведь задача получения сразу нескольких напряжений не такая и редкая? Ответа на этот вопрос у меня нет.
Где еще применяются магнитные усилители? В тепловозах. Там они используются для регулировки тока возбуждения тягового генератора. Ниже показан фрагмент схемы тяговой электропередачи тепловоза 2ТЭ10М.

Аналогично построена схема управления генератором дизель-электрических экскаваторов.
Говорят, что магнитные усилители применяют для плавного включения и выключения освещения концертных залов и кинотеатров. Не знаю, насколько это сегодня соответствует действительности, но в прошлом так вполне могли делать. Суммарная мощность осветительных ламп – много киловатт, магнитный усилитель может управлять ими с минимальными потерями.

Там же приведены и принципиальные схемы.
Внешне дроссели магнитного усилителя выглядели так, на фото они справа, три одинаковых:

Где в радиолюбительской практике можно применить магнитный усилитель? Конечно, раз до этого обходились без него, можно обходиться и дальше. Но было бы весело продемонстрировать довольно редкую на сегодняшний день технологию. Не знаю, например, можно попробовать заставить магнитный усилитель работать в паяльной станции. Взять электронный трансформатор (какой-нибудь Taschibra), запитать от него паяльник переменным напряжением через насыщающийся дроссель, а с помощью небольшого управляющего тока управлять нагревом. Можно быть уверенным – такой модной паяльной станции нет больше ни у кого :)
Начитался тут всяких интернетов и решил сваять свой собственный левитрон, без всяких цифровых глупостей. Сказано – сделано. Выкладываю муки творчества на всеобщее обозрение.
1.Краткое описание
Левитрон – это устройство, удерживающее объект в равновесии с силами гравитации с помощью магнитного поля. Давно известно, что невозможно левитировать объект, используя статичные магнитные поля. В школьной физике это называлось состоянием неустойчивого равновесия, насколько я помню. Однако, затратив немного желания, знаний, усилий, денег и времени, возможно левитировать объект динамически путем использования электроники в качестве обратной связи.
Получилось вот что:

2.Фунциональная схема

Электро-магнитные датчики, расположенные на торцах катушки, выдают напряжение, пропорциональное уровню магнитной индукции. В случае отсутствия внешнего магнитного поля эти напряжения будут одинаковы вне зависимости от величины тока катушки.
При наличии постоянного магнита вблизи нижнего датчика блок управления будет формировать сигнал, пропорциональный полю магнита, усиливать его до нужного уровня и передавать на ШИМ для управления током через катушку. Таким образом, возникает обратная связь и катушка будет генерировать такое магнитное поле, которое будет удерживать магнит в равновесии с силами гравитации.
Что-то заумно все получилось, попробую по другому:
— Нет никакого магнита — индукция на торцах катушки одинакова — сигнал с датчиков одинаков — блок управления выдает минимальный сигнал — катушка работает на всю мощь;
— Близко поднесли магнит — индукция сильно разная — сигналы от датчиков сильно разные — блок управления выдает максимальный сигнал — катушка отключается совсем — магнит никто не держит и он начинает падать;
— Манит падает — отдаляется от катушки — разница сигналов с датчиков уменьшается — блок управления уменьшает выходной сигнал — ток через катушку увеличивается — увеличивается индукция катушки — магнит начинает притягиваться;
— Манит притягивается — приближается к катушке — разница сигналов с датчиков увеличивается — блок управления увеличивает выходной сигнал — ток через катушку уменьшается — уменьшается индукция катушки — магнит начинает падать;
— Чудо — магнит не падает и не притягивается — вернее, и падает и притягивается несколько тысяч раз в секунду — то есть возникает динамическое равновесие — магнит просто висит в воздухе.
3.Конструкция
Главным элементом конструкции является электро-магнитная катушка (соленоид), которая и удерживает своим полем постоянный магнит.
На пластиковый каркас D36x48 плотно намотано 78 метров медного эмалированного провода диаметром 0.6 мм, получилось где-то 600 витков. По расчетам, при сопротивлении 4.8Ом и питании 12В, ток будет 2.5А, мощность 30Вт. Это необходимо для подбора внешнего блока питания. (По факту получилось 6.0Ом, вряд ли нарезали больше провода, скорее сэкономили на диаметре.)
Внутрь катушки вставлен стальной сердечник от дверной петли диаметром 20мм. На его торцах с помощью термоклея закреплены датчики, которые обязательно должны быть ориентированы в одинаковом направлении.
Катушка с датчиками закреплена на кронштейне из алюминиевой полосы, который, в свою очередь, крепится к корпусу, внутри которого находится плата управления.
На корпусе расположен светодиод, выключатель и гнездо питания.
Внешний блок питания (GA-1040U) взят с запасом по мощности и обеспечивает ток до 3.2А при 12В.
В качестве левтитрующего объекта используется N35H магнит D15x5 с приклеенной банкой из под кока-колы. Сразу скажу, что полная банка не годится, поэтому тонким сверлом делаем отверстия по торцам, сливаем ценный напиток (можно выпить если не боитесь стружки) и к верхнему колечку клеим магнит.

4.Принципиальная схема

Сигналы с датчиков U1 и U2 подаются на операционный усилитель OP1/4, включенный по дифференциальной схеме. Верхний датчик U1 подключен к инвертирующему входу, нижний U2 – к неинвертирующему, то есть сигналы вычитаются, и на выходе OP1/4 получаем напряжение, пропорциональное только уровню магнитной индукции, создаваемому постоянным магнитом вблизи нижнего датчика U2.
Комбинация элементов C1,R6 и R7 является изюминкой данной схемы и позволяет достичь эффекта полной стабильности, магнит будет висеть как вкопанный. Как это работает? Постоянная составляющая сигнала проходит через делитель R6R7 и ослабляется в 11 раз. Переменная составляющая проходит через фильтр C1R7 без ослабления. Откуда вообще берется переменная составляющая? Постоянная часть зависит от положения магнита вблизи нижнего датчика, переменная часть возникает из-за колебаний магнита вокруг точки равновесия, т.е. от изменения положения во времени, т.е. от скорости. Нам интересно, чтобы магнит был неподвижен, т.е. его скорость была равна 0. Таким образом, в управляющем сигнале мы имеем две составляющих – постоянная отвечает за положение, а переменная – за стабильность этого положения.
Далее, подготовленный сигнал усиливается на OP1/3. С помощью переменного резистора P2 устанавливается необходимый коэффициент усиления на этапе настройки для достижения равновесия в зависимости от конкретных параметров магнита и катушки.
На OP1/1 собран простой компаратор, который отключает ШИМ и, соответственно, катушку, когда рядом нет магнита. Очень удобная вещь, не надо вынимать блок питания из розетки если убрали магнит. Уровень срабатывания задается переменным резистором P1.
Далее, управляющий сигнал подается на широтно-импульсный модулятор U3. Размах выходного напряжения 12В, частота выходных импульсов задается номиналами C2,R10 и P3, а скважность зависит от уровня входного сигнала на входе DTC.
ШИМ управляет переключением силового транзистора T1, а тот, в свою очередь, током через катушку.
Светодиод LED1 можно и не ставить, а вот диод SD1 нужен обязятельно, для слива лишнего тока и избежания перенапряжения в моменты выключения катушки из-за явления самоиндукции.
NL1 – это наша самодельная катушка, коей посвящен отдельный раздел.
В результате, в режиме равновесия, картина будет примерно такая: U1_OUT=2.9V, U2_OUT=3.6V, OP1/4_OUT=0.7V, U3_IN=1.8V, T1_OPEN=25%, NL1_CURR=0.5A.
Для наглядности прикладываю графики передаточной характеристики, АЧХ и ФЧХ, и осциллогаммы на выходе ШИМ и катушки.



5.Выбор компонентов
Устройство собрано из недорогих и доступных компонентов. Самой дорогой оказалась медная проволока WIK06N, за 78 метров WIK06N заплатил 1200 руб, все остальное, вместе взятое, обошлось значительно дешевле. Тут вообще широкое поле для экспериментов, можно обойтись без сердечника, можно взять проволоку потоньше. Главное не забывать, что индукция по оси катушки зависит от количества витков, тока по ним и геометрии катушки.
В качестве датчиков магнитного поля U1 и U2 используются аналоговые датчики Холла SS496A с линейной характеристикой вплоть до 840Гс, это самое то для нашего случая. При использовании аналогов с другой чувствительностью потребуется корректировка коэффициента усиления на OP1/3, а также проверка на уровень максимальной индукции на торцах вашей катушки (в нашем случае с сердечником она достигает 500Гс), чтобы датчики не входили в насыщение при пиковой нагрузке.
OP1 -это счетверенный операционный усилитель LM324N. При выключенной катушке выдает 20мВ вместо нуля на 14 выходе, но это вполне приемлемо. Главное не забыть выбрать из кучки 100К резисторов наиболее близкие по фактическому номиналу для установки в качестве R1,R2,R3,R4.
Номиналы C1,R6 и R7 выбраны путем проб и ошибок как самый оптимальный вариант для стабилизации магнитов разных калибров (тестировались N35H магниты D27x8, D15x5 и D12x3). Соотношение R6/R7 можно оставить как есть, а номинал C1 увеличивать до 2-5мкФ, в случае возникновения проблем.
При использовании очень маленьких магнитов, вам возможно будет не хватать коэффициента усиления, в этом случае урежьте номинал R8 до 500Ом.
D1 и D2 это обычные выпрямительные диоды 1N4001, тут подойдут любые.
В качестве широтно-импульсного модулятора U3 используется распространенная микросхема TL494CN. Частота работы задается элементами C2, R10 и P3 (по схеме 20кГц). Оптимальный диапазон 20-30кГц, при меньшей частоте появляется свист катушки. Вместо R10 и P3 можно просто поставить резистор 5.6K.
T1 это полевой транзистор IRFZ44N, подойдет и любой другой из этой же серии. При выборе других транзисторов может потребоваться установка радиатора, ориентируйтесь на минимальные значения сопротивления канала и заряда затвора.
SD1 это диод шоттки VS-25CTQ045, тут я хватанул с большим запасом, подойдет и обычный быстродействующий диод, но, возможно, будет сильно греться.
LED1 желтый светодиод L-63YT, здесь, как говорится, на вкус и цвет, можно их и побольше наставить, чтобы все светилось разноцветными огнями.
U4 это стабилизатор напряжения 5В L78L05ACZ для питания датчиков и операционного усилителя. При использовании внешнего блока питания с дополнительным выходом 5В, можно обойись и без него, но конденсаторы лучше оставить.

6.Заключение
Все получилось как задумано. Устройство стабильно работает круглые сутки, потребляет всего 6Вт. Ни диод, ни катушка, ни транзистор не греются. Прикладываю еще пару фоток и финальное видео:




7. Дисклаймер
Я не электронщик и не писатель, просто решил поделиться опытом. Может что-то покажется вам слишком очевидным, а что-то слишком сложным, а о чем-то забыл упомянуть вообще. Не стесняйтесь вносить конструктивные предложения и по тексту и по улучшению схемы, чтобы люди могли запросто это повторить, если будет такое желание.
Читайте также: