
Кривошипно ползунный механизм своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 04.10.2024
Изобретение относится к машиностроению, в частности к производству поршневых и комбинированных двигателей внутреннего сгорания. Кривошипно-ползунный механизм двигателя внутреннего сгорания, содержащий поршень с отверстием, в котором установлен поршневой палец, шатун, втулку поршневой головки шатуна с внутренним цилиндрическим отверстием под поршневой палец, при этом содержит компенсатор угловых отклонений от одинаковости взаимного углового положения оси поршня относительно оси цилиндра в форме сферического шарнира, установленного между поршневым пальцем и поршневой головкой шатуна, причем поршневая головка шатуна содержит сферическое отверстие под втулку, втулка выполнена из упругого антифрикционного материала, снаружи содержит сферическую поверхность и разъем вдоль ее продольной оси с углом наклона в поперечной плоскости относительно касательной к ее внутренней цилиндрической поверхности в интервале от 0 до 90°. Изобретение обеспечивает уменьшение отклонения взаимного углового положения оси поршня относительно оси цилиндра в его продольной плоскости и снижение удельного давления в сопряжениях между деталями механизма, скоростей их изнашивания и увеличение его ресурса. 3 ил.



Формула изобретения
Кривошипно-ползунный механизм двигателя внутреннего сгорания, содержащий поршень с отверстием, в котором установлен поршневой палец, шатун, втулку поршневой головки шатуна с внутренним цилиндрическим отверстием под поршневой палец, отличающийся тем, что содержит компенсатор угловых отклонений от одинаковости взаимного углового положения оси поршня относительно оси цилиндра в форме сферического шарнира, установленного между поршневым пальцем и поршневой головкой шатуна, причем поршневая головка шатуна содержит сферическое отверстие под втулку, втулка выполнена из упругого антифрикционного материала, снаружи содержит сферическую поверхность и разъем вдоль ее продольной оси с углом наклона в поперечной плоскости относительно касательной к ее внутренней цилиндрической поверхности в интервале от 0 до 90°.
Описание изобретения к патенту
Предлагаемое изобретение относится к машиностроению, в частности к производству поршневых и комбинированных двигателей внутреннего сгорания (ДВС).
Из-за прогибов коленчатого вала кривошипно-ползунного механизма, неточностей в его изготовлении или монтаже имеются отклонения от одинаковости взаимного углового положения шатунных шеек, коленчатого вала, поршневого пальца, оси поршня и оси цилиндра (см. К.Энглиш. Поршневые кольца. Т1. Теория, изготовление, конструкция и расчет. - М., 1962, с.114, 115).
При отклонении в продольной плоскости механизма от одинаковости взаимного углового положения оси поршня от оси цилиндра со стороны цилиндра на поршень действует сила, которая относительно оси шатунной шейки вала коленчатого создает большой изгибающий момент, который деформирует механизм в продольной плоскости и стремится повернуть ось поршня к оси цилиндра.
Недостаток кривошипно-ползунного механизма состоит в использовании деформации его деталей для компенсации отклонений от одинаковости взаимного углового положения оси поршня относительно оси цилиндра в продольной плоскости и создании большого изгибающего момента, что увеличивает удельные давления в его сопряжениях, скорости их изнашивания и снижает его надежность.
Известен поршень, преимущественно для поршневых машин с кривошипно-шатунным механизмом, состоящий из корпуса с выполненными в нем отверстиями для установки поршневого пальца и демпфирующего элемента, который с целью снижения динамических нагрузок выполнен в виде концентрически расположенных распорного и пружинного колец в отверстиях поршня, причем пружинное кольцо выполнено разъемным (см. АС СССР № 678228, F16J 1/10. Опубл. 05.08.79. Бюл. № 29).
Недостаток конструкции состоит в использовании демпфирующих элементов для компенсации отклонения от одинаковости взаимного углового положения оси поршня относительно оси цилиндра в продольной плоскости, недостаточном снижении изгибающего момента, удельных давлений в сопряжениях, скоростей их изнашивания и незначительном повышении ресурса механизма.
Известен кривошипно-ползунный механизм двигателя внутреннего сгорания, содержащий поршень с отверстием, в котором установлен поршневой палец и кольцевые демпфирующие элементы, которые имеют овальную форму и расположены попарно между поршневым пальцем и шатуном с одинаковым угловым смещением относительно друг друга (см. АС СССР № 870806, F16J 1/16. Опубл. 07.10.81. Бюл. № 37).
Недостаток кривошипно-ползунного механизма состоит в использовании демпфирующих элементов для уменьшения отклонения от одинаковости взаимного углового положения оси поршня относительно оси цилиндра в продольной плоскости, недостаточном снижении изгибающего момента, удельных давлений в сопряжениях, скоростей их изнашивания и малом повышении ресурса механизма.
Техническая задача создания кривошипно-ползунного механизма, обеспечивающего уменьшение отклонения от одинаковости взаимного углового положения оси поршня относительно оси цилиндра, снижение изгибающего момента, удельных давлений в его сопряжениях, скоростей их изнашивания и увеличения его надежности решается установкой между поршневым пальцем и поршневой головкой шатуна компенсатора угловых отклонений оси поршня относительно оси цилиндра в форме сферического шарнира.
Кривошипно-ползунный механизм двигателя содержит цилиндр, поршень, поршневой палец, шатун и втулку поршневой головки шатуна. Поршневая головка шатуна имеет сферическое отверстие под втулку. Втулка выполнена из упругого антифрикционного материала и содержит внутреннее цилиндрическое отверстие под поршневой палец и наружную сферическую поверхность под поршневую головку шатуна. Втулка вдоль продольной оси имеет разъем. Угол наклона разъема относительно касательной к внутренней цилиндрической поверхности отверстия втулки может быть в интервале от 0 до 90°.
Втулку скручивают, что уменьшает ее до нужного размера, и устанавливают в смазанное сферическое отверстие поршневой головки шатуна, где она распрямляется сама частично или полностью и (или) ее распрямляют с помощью приспособления в форме конуса, а затем дорном калибруют ее внутреннее отверстие под размер поршневого пальца. Поршневой палец при сборке поршня с шатуном через отверстие в бобышке поршня устанавливают во внутреннее цилиндрическое отверстие втулки. Внутренняя сферическая поверхность поршневой головки шатуна и наружная сферическая поверхность втулки образуют сферический шарнир. Для уменьшения момента сил трения сферические поверхности шарнира разделены смазочным материалом.
Работа кривошипно-ползунного механизма состоит в том, что увеличение отклонения от одинаковости взаимного углового положения оси поршня относительно оси цилиндра в продольной плоскости механизма вызывает появление силы давления со стороны цилиндра на поршень, которая относительно центра сферического шарнира создает момент силы. Однако момент этой силы увеличивается только до величины момента сил трения в сферическом шарнире. Как только момент силы преодолеет момент сил трения в сферическом шарнире, он повернет ось поршня в сторону оси цилиндра, что уменьшит угол отклонения его оси от одинаковости взаимного углового положения с осью цилиндра. Поворот оси поршня в сторону оси цилиндра снижает изгибающий момент силы, действующей со стороны цилиндра на поршень до момента меньше момента сил трения в смазочном слое между его поверхностями вплоть до его полного исчезновения.
Уменьшение момента силы давления со стороны цилиндра на поршень снижает до минимального значения удельные давления в сопряжениях, скорости их изнашивания и увеличивает его надежность.
Преимущество кривошипно-ползунного механизма состоит в размещении между поршневым пальцем и поршневой головкой шатуна компенсатора угловых отклонений оси поршня относительно оси цилиндра в форме сферического шарнира. Сферические поверхности шарнира для снижения трения разделены смазочным материалом. Поэтому момент силы, действующей со стороны цилиндра на поршень относительно центра сферического шарнира, может быть снижен от величины момента сил трения в смазочном материале между его сферическими поверхностями до нуля.
Конструкция предлагаемого кривошипно-ползунного механизма двигателя внутреннего сгорания представлена фиг.1, фиг.2 и фиг.3.
На фиг.1 приведен кривошипно-ползунный механизм ДВС при отклонении оси поршня в продольной плоскости от оси цилиндра на начальный угол, обеспечивающий контакт поршня с цилиндром.
На фиг.2 приведен кривошипно-ползунный механизм ДВС после поворота оси поршня к оси цилиндра.
На фиг.3 приведена конструкция втулки с углом наклона ее продольного разъема.
Где: 1 - цилиндр; 2 - поршень; 3 - поршневая головка шатуна, 4 - втулка; 5 - поршневой палец; 6 - сферическая поверхность шарнира; 7 - продольный разъем втулки; Рц - сила давления со стороны цилиндра на поршень; Оц - ось цилиндра; Ош - ось шатуна; Оп - ось поршня; Цш - центр сферического шарнира; 1 - начальный угол отклонения оси шатуна и оси поршня от оси цилиндра в продольной плоскости механизма. 2 - полный угол отклонения оси шатуна от оси цилиндра; - угол поворота оси поршня к оси цилиндра; - угол наклона продольного разъема втулки.
Работает кривошипно-ползунный механизм следующим образом. Увеличение угла отклонения от одинаковости взаимного углового положения оси шатуна Ош и оси поршня Oп относительно оси цилиндра Оц в продольной плоскости механизма двигателя на начальный угол 1 обеспечивает выбор зазора между поршнем 2 и цилиндром 1 и появление силы Рц, действующей со стороны цилиндра 1 на поршень 2 (фиг.1). Дальнейшее увеличение угла 1 отклонения оси шатуна Ош от оси цилиндра Оц до величины угла 2 сопровождается увеличением силы Рц, действующей со стороны цилиндра 1 на поршень 2, и созданием относительно центра сферического шарнира Цш момента этой силы. Моменту силы Рц противостоит момент сил трения в слое смазочного материала, находящемся между сферическими поверхностями 6 втулки 4 и поршневой головки 3 шатуна. Как только момент силы Рц относительно центра сферического шарнира Цш превысит момент сил трения в сферическом шарнире, то он преодолеет его и повернет ось поршня Оп в сторону оси цилиндра Оц на угол , что уменьшает угол отклонения оси поршня от одинаковости взаимного углового положения оси поршня Оп относительно оси цилиндра Оц (фиг.2). Поворот оси поршня в сторону оси цилиндра снизит момент силы Рц, действующей со стороны цилиндра 1 на поршень 2, от момента сил трения до нуля. Сила Рц достигнет нулевого значения при условии, что угол поворота оси поршня 2 в сторону оси цилиндра будет равен углу 2 наклона оси Ош шатуна. В этом случае ось поршня 2 будет параллельна оси Оц цилиндра 1 (фиг.2). Уменьшение момента силы Рц, действующей со стороны цилиндра 1 на поршень 2, от момента сил трения в сферическом шарнире до нуля уменьшает удельные давления в сопряжениях кривошипно-ползунного механизма, скорости их изнашивания и повышает его надежность.
Преимущество кривошипно-ползунного механизма состоит в установке между его поршневым пальцем и поршневой головкой шатуна вместо демпферов компенсатора угловых отклонений оси поршня от одинаковости взаимного углового положения с осью цилиндра в виде сферического шарнира, что снижает момент силы Рц, действующей со стороны цилиндра на поршень, от момента сил трения в сферическом шарнире до нуля, уменьшает удельные давления в сопряжениях, скорости их изнашивания и увеличивает его надежность. Компенсатор срабатывает сразу при появлении углового отклонения оси поршня от оси цилиндра, поэтому эксплуатация двигателя будет проходить при минимальных отклонениях, что снизит работу сил трения, повысит эффективную мощность двигателя, снизит удельный расход топлива и затраты на ремонт.
Рассмотрим силовой расчет кривошипно-ползунного механизма компрессора.
Исходными данными являются:
- 1) кинематическая схема механизма;
- 2) массы и моменты инерции звеньев, положение их центров масс (mvJxs, mvJ2S, тъ);
- 3) угловая скорость cot и угловое ускорение г] звена 1
- 4) сила сопротивления, приложенная к поршню F3;
- 5) силы тяжести всех звеньев.
Установим последовательность выполнения силового расчета.
Для рассматриваемого положения механизма записываем векторные уравнения скоростей и ускорений, строим планы скоростей (а) и ускорений (б) (рис. 9.4). Далее определяем значения главных векторов сил инерции (Ф , Ф )
и главных моментов сил инерции (Мф^ М т :





После определения F x решаем векторное уравнение (9.5') 21
Задавшись масштабом ц строим план сил
(рис. 9.7) для уравнения (9.5').
Из плана сил определяем силы F,u и F,n

Определяем угловую координату ф2| силы F.n, замерив ее от положительного направления оси х.
Рассмотрим равновесие звена 3 (рис. 9.8).
Из условия равновесия звена 3 определяем

силу (реакцию) Р.,г и плечо силы F.w





После этого рассматриваем равновесие кривошипа (рис. 9.9) и определяем силу Fu (рис. 9.10), угловую координату срм и момент МдУ
Контрольная работа по технической механике. Раздел 1. Машины и механизмы
Этап I.
Провести аналитическое исследование кривошипно-ползунного механизма, изображенного на рис.1.1 , а именно: найти перемещение xC, скорость υС и ускорение аС ползуна С в зависимости от значения угла φ1.

Рис.1.1 Схема кривошипно-ползунного механизма
Прежде чем получить вариант с исходными данными, изучите пункт 1.4.2 Аналитический метод кинематического анализа теоретического материала и пример 1, который приводится ниже:
Пример1. Провести аналитическое исследование кривошипно-ползунного механизма, а именно: найти перемещение, скорость и ускорение ползуна С в зависимости от значения угла φ1. Для расчета принять: d =0,07м; r =0,2м; l =0,8м, ω1=1с–1, (ε1=0), φ1=π/3.
Теоретическое сопровождение задачи:
При вращении кривошипа АВ с заданной угловой скоростью ω1= d φ1/ dt
ползун С совершает возвратно поступательное движение. Такого типа механизмы используют в поршневых двигателях, насосах, компрессорах и других машинах. Для того чтобы кривошип АВ имел возможность совершать полный оборот, размеры звеньев АВ и ВС механизма должны удовлетворять неравенству
Известны следующие параметры механизма (рис. 3.1): (Все ускорения берутся из первого листа курсового проекта).
Требуется определить реакции в кинематических парах и уравновешивающую силу.

Изображаем механизм в заданном положении с обозначением масштабного коэффициента м/мм, который в данном случае обозначает, что механизм уменьшен в два раза. На механизм действуют следующие силы.

1.Сила полезного сопротивления , указываемая в задании. Она приложена в точке В ползуна 3 и направлена горизонтально.
2.Силы тяжести , определяемые через массы звеньев, которые можно условно найти по формуле , где q –масса единицы длины звена, l –длина звена


Силы тяжести прикладываются в центрах масс S1, S2, S3 и направлены вертикально вниз.
3.Силы инерции звеньев , определяемые по формуле


Эти силы прикладываются в центрах масс и направлены они в стороны, обратные ускорениям . (Желательно план ускорений с первого листа перенести на второй лист).

4.Момнеты сил инерции М, которые можно найти по формуле , где IS –моменты инерции звеньев относительно центральных осей
т.к.

т.к.

Моменты инерции звеньев определяем по формуле

.

Следовательно,
Моменты сил инерции М направлены в стороны, обратные угловым ускорениям.

5. Уравновешивающая сила , прикладываемая в точке А кривошипа 1 и направленная перпендикулярно ему. Пусть в нашем примере она направлена вверх.
Все силы и моменты указываем на механизме, причем длины векторов берем произвольно.
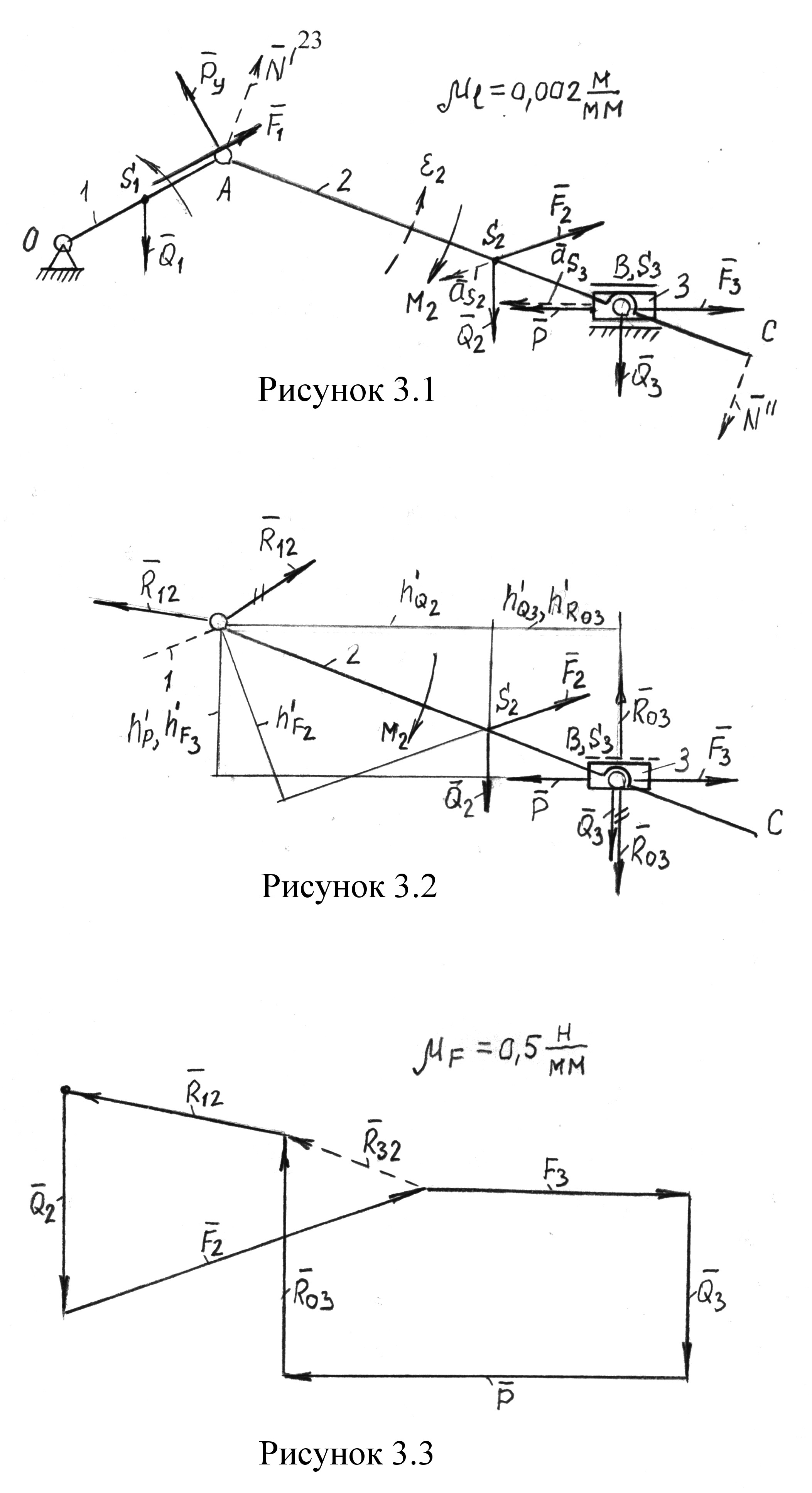
Изображаем отдельно структурную группу, состоящую из шатуна 2 и ползуна 3 (рис. 3.2). Реакцию направляем пока произвольно, а реакцию вертикально. Пусть она направлена вниз. Рассматриваем равновесие группы и записываем уравнение моментов относительно точки А. Для этого сначала из точки А проводим перпендикуляры ко всем силам, замеряем их длины в миллиметрах и умножаем на , получая их величины:

Уравнение равновесия будет иметь вид:



Так как эта сила оказалась отрицательной, то вектор мы зачеркиваем (стирать нельзя!) и направляем в другую сторону.
Используя графическое условие равновесия группы , составляем силовой многоугольник (рис. 3.3) в масштабе .
Вычисляем длины векторов сил


Силы в многоугольнике идут в любом порядке, но желательно, чтобы сначала шли все силы одного звена, а затем силы, действующие на другое звено. Если длина вектора силы окажется менее 3 мм, то вместо этой силы ставим точку, около которой записываем обозначение силы. Начало первой силы (в данном случае это сила ) обозначаем точкой. Соединяем конец последней силы (у нас это ) с началом первой, получая вектор , который направлен в начало силы . Замеряем длину этого вектора в миллиметрах и умножаем на , получая величину силы


Вектор в точке А перечеркиваем и направляем его так, как он идет в многоугольнике.
Чтобы получить реакцию в шарнире В, нужно рассмотреть равновесие одного звена, например, второго. Для этого начало силы нужно соединить с концом силы . Получаем вектор , который идет в начало силы . Замеряем длину этого вектора и умножаем на , получая значение силы

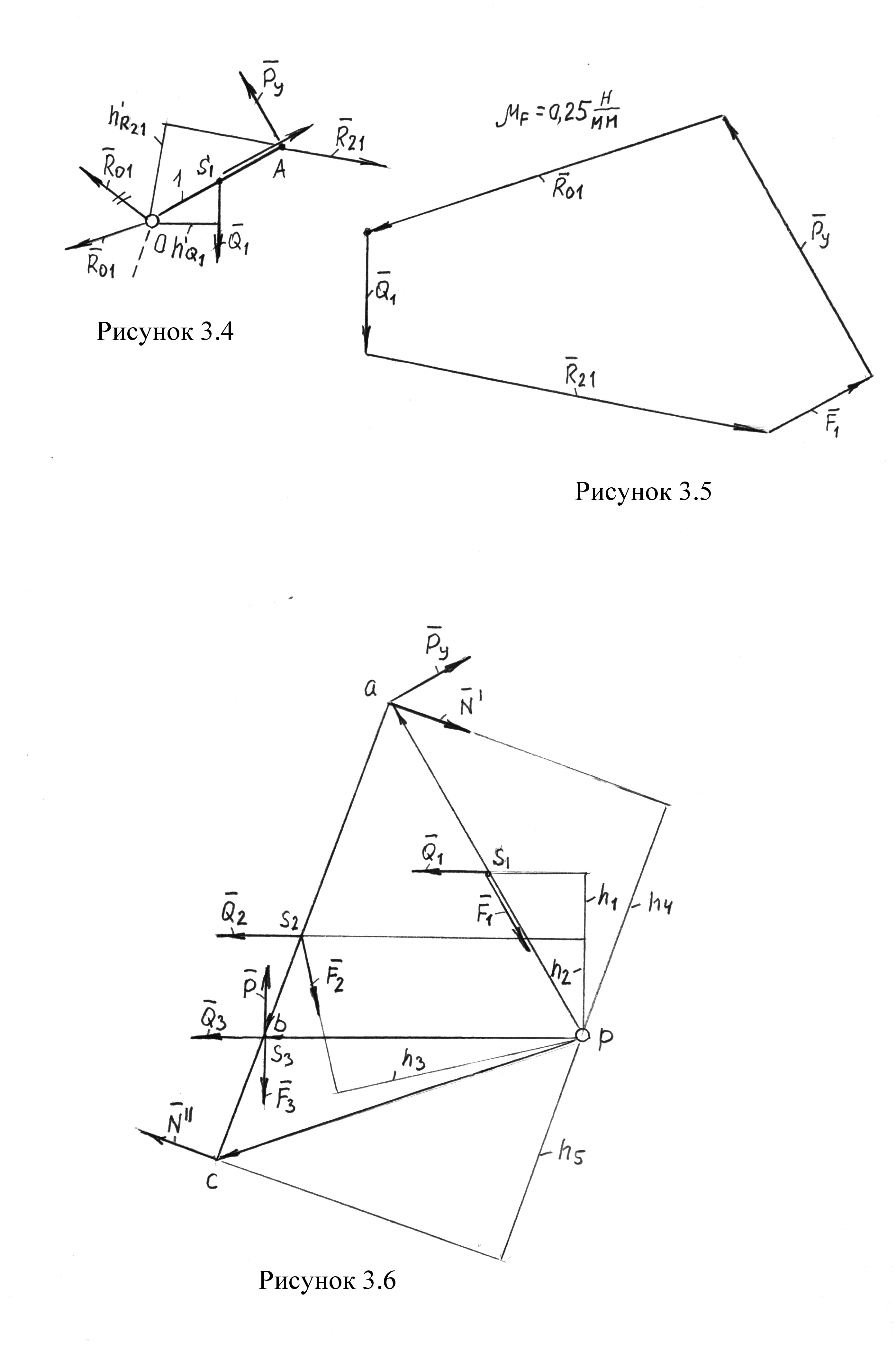
Изображаем отдельно кривошип 1 со всеми силами (рис. 3.4.), причем реакцию направляем пока произвольно, а сила направлена в сторону, обратную силе , т.е. .Из точки О проводим перпендикуляры ко всем силам, замеряем их и умножаем на . Получаем длины плеч сил.

Рассматривая равновесие кривошипа, записываем уравнение моментов относительно точки О


Используем графическое условие равновесия кривошипа , строим силовой многоугольник в масштабе (рис. 3.5).
Находим длины векторов

Соединяя начало первой силы и конец последней , получаем вектор , который направлен в начало силы . Находим величину этой силы


Вектор в точке О перечеркиваем и направляем так, как он идет в многоугольнике.
Для поверки точности расчетов и построений найдем уравновешивающую силу по методу Жуковского. Момент силы инерции второго звена заменяем парой сил и (рис 3.1), действующих, например, в точках А и С и направленных перпендикулярно шатуну АС. При этом направление пары сил должно совпадать с направлением момента .
Найдем величины этих сил

Переносим с первого листа курсовой работы план скоростей, на который помещаем все внешние силы (рис. 3.6), приложив их в соответствующие точки и повернув на 90˚ в ту или иную сторону. В нашем случае все силы повернуты по часовой стрелке. Из полюса скоростей р проводим к силам перпендикуляры, которые являются плечами сил. Замеряем длины перпендикуляров и записываем уравнение моментов относительно полюса р

Откуда

Сравнение результатов, полученных двумя способами, говорит о том, что погрешность вычислений и построений незначительна.
Читайте также: