
Как сделать чтобы радиоуправляемые машинки работали на разной частоте
Добавил пользователь Владимир З. Обновлено: 19.09.2024
Все новое поколение радиоуправляемых игрушек и моделей имеет частоту 2.4 ГГц (2.4G). Те, кто увлекается техникой, безусловно, оценит подарок в виде радиоуправляемой модели на этой частоте. Сегодня существует большое разнообразие моделей на дистанционном управлении, которые оснащаются высокотехническим оборудованием. Благодаря простоте в управлении они доступны даже малышам. Хотя интерес больше все-таки вызывают у парней постарше. Тем более, что современные игрушки имеют стопроцентное сходство с аналогами, а это обстоятельство усиливает к ним особое внимание.
Последние модели вертолетов, катеров, автомобилей, танков и самолетов оборудуются самыми современными технологиями, которые позволяют с легкостью ими управлять даже на дальнем расстоянии. Например, использование радиочастоты 2.4 ГГц позволяет быстро передавать на управляемую модель ту или иную команду. Технология 2.4G, имеющая функцию автоматической идентификации, обеспечивает помехозащищенность и надежность радиоуправляемой аппаратуры. Теперь пульт управления, работающий на частоте 2.4ГГц, имеет значительно лучший сигнал для дальнего расстояния. В то же время это никак не влияет на его качество передачи, которая стала лучше в несколько раз. Высокая частота управления позволяет плавать нескольким катерам рядом и устраивать гонки. Это касается и вертолетов, которые могут взлетать одновременно. Все это стало возможным благодаря новой системе, которая устойчива к радиопомехам.

Особенно полезна частота 2.4 ГГц на соревнованиях. Нередко возникали проблемы в использовании одного канала для управления моделью. Если такое обнаруживалось, то полностью терялось радиоуправление. Для этого использовалась специальная деталь – кварцевый резонатор. Как только менялась пара резонаторов, одновременно изменялась и их частота. По этой причине до начала соревнований каждый участник сверялся, вследствие чего составлялась сетка частот. Однако с появлением частоты 2.4 Ghz все это упразднилось. Теперь нет необходимости использовать, так сказать, кварцы, так как подстройка приемник-передатчик осуществляется автоматически. Это стало возможным благодаря технологии FHSS.
Итак, если вы желаете приобрести качественную радиоуправляемую игрушку, то обращайте свое внимание на все ее технические характеристики. Особенно на наличие рабочей частоты 2.4 ГГц. Тогда вы в полной мере сможете насладиться использованием той или иной модели, а, возможно, и победить на очередном соревновании.
Компания ШопНтойз прилагает вам широкий спект радиоуправляемых моделей и игрушки оптом с частотой 2.4Ghz. Это модели от известный производителей Heng Long, MJX R/C, HSP, E-sky, Dynam, Art-tech, Walkera, WL toys, Syma а также другие торговые марки, которые можно купить у нас в магазине.
| QUOTE (кулер 23 @ Dec 11 2008, 12:45 PM) |
| А можно что нибудь к машынке приделать всё таки 12 кнопок 4 за управление ВПЕРЁД НАЗАД ВЛЕВО ВПРАВО |
а програмировать ты умееш ?
у меня камп не хочет поэтому и не собираю
програмировать ещё не пробовал прогроматора нет
| QUOTE (кулер 23 @ Dec 11 2008, 06:31 PM) |
| Да и зачем нужно програмирование?? Я новенький и поэтому нема |
| QUOTE (кулер 23 @ Dec 11 2008, 06:31 PM) |
| Да и зачем нужно програмирование?? Я новенький и поэтому нема |
Блин у меня 2 микры PIC16F6288A которые нужни, но одна SMD что делать?

Присоединённое изображение
пить, потом курить, читать форум и даташиты
Твой вопрос на столько туп, что не знают что и ответить тебе.
Что делать с микросхемами? Сначала прошить, потом впаять в схему.
| QUOTE (CyLLlKA @ Dec 12 2008, 07:37 PM) |
| Твой вопрос на столько туп, что не знают что и ответить тебе. Что делать с микросхемами? Сначала прошить, потом впаять в схему. |
Я сам туп как валенок
можно ещё вопрос а как или через что прошивать может прогроматор там или ещё что схемку скинте какую там
| QUOTE (кулер 23 @ Dec 11 2008, 06:31 PM) |
| Да и зачем нужно програмирование?? Я новенький и поэтому нема |

Присоединённое изображение (Нажмите для увеличения)
| QUOTE (CyLLlKA @ Dec 12 2008, 07:37 PM) |
| Твой вопрос на столько туп, что не знают что и ответить тебе. Что делать с микросхемами? Сначала прошить, потом впаять в схему. |
Я сам туп как валенок
CyLLlKA, за прошивальщик зачёт!
У меня тоже такая же где то была, только надписи и рисунки почему то стали блеклыми, а крышечка не патёртая, а так же из лакерованного дерева выполнена! Шьёт пики, авр и мсп 430, проверено!
Автару, юзай поиск, разжёвывать всё до полного нуля, до валенка врятли кто будет, скарее забанят.
Накопилось у меня некоторое количество радиоуправляемых игрушек, из тех, которые покупать своим двум детям нельзя: один пульт управляет всем в округе, никакого разделения ни по частотам, ни по кодам. Одновременно играть не получится. У меня эти игрушки работают на частоте 27mhz, но аналогичные могут работать на частотах 35, 40, 49 mhz по тому же простейшему протоколу, о котором и пойдет речь дальше.
Мне пришла мысль заменить пульт управления игрушки компьютером. Основой для подобных мыслей послужил вот этот пост.
Моя идея заключалась в том, чтобы сделать USB девайс, на который можно передавать с компьютера коды команд, а это устройство каждую команду закодирует и выдаст в эфир RC-машинке.
Первым этапом я решил убедиться самостоятельно насколько описанное в вышеприведенном посте подходит к моим RC-игрушкам. Как у автора поста, так и у меня, все игрушки базировались на комплекте популярных микросхем RX-2 для приемника и TX-2 для передатчика. Эти микросхемы имеют 5 входов для считывания кнопок нажатия, которые они кодируют и передают в эфир на выходной каскад. Таким образом, к примеру, нажатие кнопки "вперед" микросхема кодирует следующим образом: заголовок, состоящий из 4 длинных импульсов с заполнением 75% и сам код нажатия - десять коротких импульсов с заполнением 50%.
Список кодов комманд
Мое оборудование использовало следующий набор команд:
Forward: 10 pulses
Reverse: 40 pulses
Right: 64 pulses
Forward/Left: 28 pulses
Forward/Right: 34 pulses
Reverse/Left: 52 pulses
Reverse/Right: 46 pulses
Но было несколько пультов на 27 mhz, которые не работали или работали не корректно с моими игрушками. В интернетах я нашел другой набор команд для подобного оборудования (возможно, для другого набора микросхем, не разбирался).
Forward: 16 pulses
Reverse: 40 pulses
Forward/Left: 28 pulses
Forward/Right: 34 pulses
Reverse/Left: 52 pulses
Reverse/Right: 46 pulses
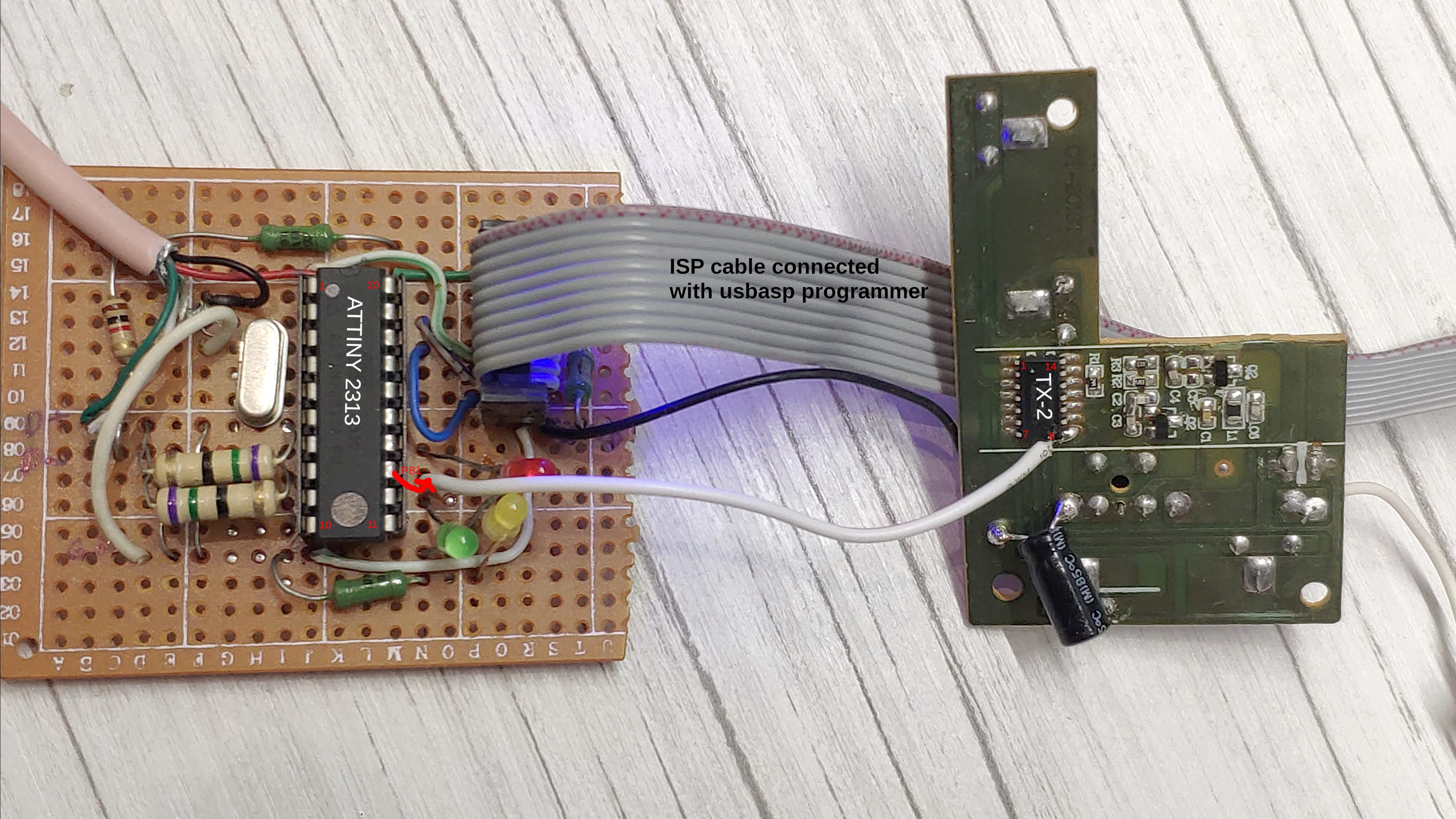
Итак, я набросал код на C++ для микроконтроллера Atmel AVR Attiny 2313 чтобы убедиться, что эта логика работает. Выходной пин микроконтроллера я подключил к выходному каскаду пульта игрушки чтобы не собирать радиочастотную схему самостоятельно. Эту точку легко найти по пину 8 микросхемы TX-2: именно он является выходом закодированных импульсов нужной длины, которые подаются в этот каскад. Тут можно было бы даже просто взять ножовку и выпилить все кнопки вместе с микросхемой TX-2, но они для подобных экспериментов не мешают поэтому оставил как есть.

Связь с компьютером через USB
Для связи с компьютером я использовал библиотеку vusb, набросав на универсальной плате обвес по следующей схеме:
Получился вот такой девайс:
Отладка
Код я написал, но вот работать как нужно он отказался. Для отладки пришлось задействовать запылившийся Saleae Logic Analyser. Так я смог заставить соответствовать длины импульсов с моего контроллера тому, что выдавала микросхема TX-2 и тогда все прекрасно заработало.

На фото можно увидеть визуально как кодируется сигнал "вперед", который имеет в своем теле 10 импульсов:
4 длинных импульса заголовок: каждый ~1.3ms высокий уровень and ~0.5ms низкий уровень сигнала с 75% заполнением: ~1.8ms всего.
10 коротких импульсов: каждый 0.5ms высокий and 0.5ms низкий.
В случае передачи другого кода заголовок остается тем же, а 10 коротких импульсов заменяются на соответствующее другому коду количество.
Код на C++
Для компьютера я сделал программу, которая в цикле читает клавиатуру, кодирует и передает в USB контроллеру. Исходные коды для микроконтроллера и для PC я выложил в общий доступ. Компилировал используя gcc на Linux Gentoo, на Windows не проверял.
Настроим (запрограммируем) регулятор автомобиля Turnigy 1/10 4WD SCT4 Parkflyer Turnigy 1/10 4WD SCT4 с БК двигателем ARR Turnigy 1/10 4WD SCT4 с БК двигателем ARR , а также рассмотрим пару важных для автомобиля (лодки) настроек:

1. Настройки регулятора
Автомобиль Turnigy 1/10 4WD SCT4 в стоковой комплектации поставляется с регулятором Hobbyking X - Car 45 A Brushless Car ESC ( sensored / ensorless ) Parkflyer , Регулятор скорости на 45A для сенсорных/без сенсорных моторов(для авто моделей). Карта программирования регуляторов Hobby King HKSS для регуляторов HK 150A и может быть запрограммирован при помощи Hobby King HKSS programming card for HK 150 A ESC Parkflyer , Карта программирования регуляторов Hobby King HKSS для регуляторов HK 150A .
Регулятор имеет следующие программируемые параметры
Программируемый параметр
Порог отсечки по низкому напряжению
*Розовым отмечено значение по умолчанию.
1. Порог отсечки по низкому напряжению
· Автоматическое определение количества ячеек
В зависимости от типа аккумулятора, установите с использованием программатора тип аккумулятора и напряжение отсечки. Регулятор постоянно контролирует напряжение на аккумуляторе и отключится при достижении напряжения аккумулятора ниже установленного уровня.
· Для аккумуляторов NiMH - если напряжение аккумуляторной сборки NiMH больше 9.0В, но меньше 12.0В, аккумулятор будет определяться как аккумулятор 3 S LiPo , а если напряжение будет меньше 9.0В, то будет определяться как 2 S LiPo .
Например, если напряжение аккумулятора NiMH равно 8.0В и отсечка установлена на 2.6В, то аккумулятор будет рассматриваться как 2 S LiPo и напряжение отсечки этого NiMH аккумулятора будет равно 2.6 х 2 =5.2В.
2. Режим движения
Данная настройка используется для покатушек в удовольствие или для гонок (если движение назад разрешено правилами гонок). Перед началом движения назад, курок передатчика должен находиться пару секунд в положении нейтраль.
Эта установка применима для гонок, функция движения назад отключена.
Примечание. В регуляторе предусмотрена защита: движение назад будет возможно только после того, как вы остановили авто и перевели курок в нейтральное положение. Это поможет предотвратить серьезные повреждения ходовой части автомобиля. Если у вас возникает ситуация, при которой требуется реверс (движение назад) после того как вы воспользовались тормозом – отпустите курок в нейтральное положение, подождите несколько мгновений, затем отожмите курок для движения назад.
3. Тайминг мотора
Этот параметр влияет на диапазон мощности и КПД электрического мотора.
2 0 - обеспечивает максимальный КПД при меньшей мощности. Больший тайминг позволяет получить большую мощность ценой КПД (меньшим временем работы). Как правило, при этом мотор выделяет больше тепла. Каждый бесколлекторный мотор реагирует на настройку тайминга по-разному. Данная установка хорошо подходит для движения по мощеным или трудным поверхностям и гонок с моторами, имеющими высокий kV или малое количество обмоток.
4 0 - подходит для легких поверхностей, для развлекательных гонок и для большего времени работы мотора.
8 0 - обеспечивает больше мощности, соответственно время работы уменьшится, при этом необходимо отслеживать температуру мотора. При данной настройке моторы, имеющие высокий kV или малое количество обмоток будут быстро выделять большое количество тепла. Безопасная температура мотора находится в пределах 74 0 -82 0 С, превышение температуры может вызвать повреждение мотора.
12 0 - обеспечивает максимальную мощность мощности и должно использоваться с большой осторожностью.
4. Начальное ускорение
используйте этот параметр для ограничения мощности, передаваемой от мотора в момент его старта. Для очень медленного начала движения используйте значение Низкое , при этом обеспечивается большее время работы аккумулятора. При значении Высокое ускорение будет быстрым, но время пробега сократится. Этот режим также будет критичным в отношении высокого токопотребления от аккумулятора.
· Низкое - используется для длительной работы аккумулятора и обеспечивает легкий режим работы для аккумулятора. Отлично подходит для начинающих.
· Среднее -среднее токопотреблениие от аккумулятора, подходит для не тяжелых дорожных условий.
· Высокое – обеспечивает полное ускорение и требует мощные аккумуляторы.
· Наибольшее -обеспечивает максимальное ускорение и также требует мощные аккумуляторы.
5. Ограничение реверса
используйте этот параметр для ограничения мощности, передаваемой от мотора при движении назад. Чем меньше процент, тем с меньшей скоростью автомобиль будет двигаться назад.
20%, 30%, 40%, 50% (начальная установка), 60%, 70%, 80%, 90%, 100%.
6. Ограничение газа
используйте этот параметр для ограничения мощности, передаваемой от мотора при движении вперед.
0% (начальная установка), 20%, 30%, 40%, 50% 60%, 70%, 80%, 90%, 100%.
7. Процент торможения
Данный параметр дает вам возможность полного контроля над степенью торможения автомобиля.
10%, 20%, 30%, 40%, 50% (начальная установка), 60%, 70%, 80%, 90%,100%.
8. Процент прихватывания тормоза (Percent drag brake)
4%(начальная установка), 8%, 12%, 15%, 20%, 25%, 30
Функция прихватывания тормоза позволяет водителю (пилоту) установить процент торможения в момент, когда курок газ был отпущен в нейтральное положение. Это напоминает торможение коллекторного мотора. Прихватывание тормоза используется в гонках для притормаживания автомобиля на приближении к поворотам и избавляет водителя от необходимости тормозить на каждом повороте.
Если вы едете по трассе с узким прохождением поворотов, то лучше установить более высокий процент.
Если вы едете по открытой местности, то меньший процент даст лучшее управление вашим автомобилем.
Если вы едете по грязи или скользкой поверхности, нужно установить наименьший процент.
9. Частота работы регулятора
8кГц (установка по умолчанию) /16 кГц.
10. Зона не чувствительности нейтрали .
Этим параметром настраивается зона не чувствительности нейтрали курка. Достигается это задержкой реакции курка в миллисекундах в момент, когда вы нажимаете курок.
2%, 3%, 4%(начальная установка), 5%, 6%
Процедура программирования
1. Подключите разъем регулятора к карте программирования.
2. Включите питание регулятора. Подождите 2 секунды, пока не загорится светодиод ВКЛЮЧЕНО. В случае неудачного подключения повторите операцию.
?wmode=opaque
Процедура калибровки.
1. Выключите регулятор. Включите передатчик и установите на канале газа значения конечных точек 100%.
2. Удерживая кнопку Set , включите регулятор и подождите 4 секунды, пока оранжевый светодиод не загорится постоянным светом. Затем отпустите кнопку Set , нажмите курок в положение полный газ до тех пор, пока красный светодиод не начнет моргать и затем загорится ровным светом. Мотор пропищит.
3. Переведите курок в положение полного тормоза до тех пор, пока оранжевый светодиод не начнет моргать и затем загорится ровным светом. Мотор пропищит.
4. Теперь переведите курок в нейтраль , при этом оба светодиода красный и оранжевый одновременно моргнут и затем загорятся ровным светом. Мотор пропищит, оба светодиода начнут моргать, калибровка закончена.
5. Выключите регулятор выключателем.
6. Включите регулятор снова, теперь он готов к работе.
?wmode=opaque
Название образовано от английского fail-safe (где fai l - потерпеть неудачу, выйти из строя + safe – безопасный ). Т.е. данная функция используется для предотвращения аварии автомобиля (лодки) вследствие потери управления и возвращает 2-й канал (канал газа) в нейтральное положение при пропадании связи.
Процедура установки Fail safe.
1. Включите передатчик.
2. Включите регулятор и приемник на автомобиле (лодке).
3. Установите курок газа в нейтральное положение, мотор при этом не должен вращаться.
5. Проверка: при нажатом курке газа выключите передатчик. Мотор должен остановиться.
Все радиоуправляемые автомодели с электромоторами оснащаются устройствами, позволяющими регулировать скорость перемещения вашей машинки, иначе говоря – изменяют частоту вращения вала двигателя по вашему желанию. Эти устройства называются регуляторами оборотов или регуляторами хода.
Электромоторы для радиоуправляемых моделей делятся на коллекторные и бесколлекторные.


Профессиональные регуляторы хода могут иметь ряд дополнительных функций (кроме стандартного изменения оборотов вращения мотора). Это в первую очередь функция торможения (осуществляется замыканием обмоток электромотора через регулятор хода). Ряд регуляторов хода могут выполнять плавное торможение, которое снижает нагрев обмоток и нагрузки на коллектор. Также некоторые регуляторы хода реверсируют направление вращения электродвигателя, тем самым обеспечивая модель функцией заднего хода. В этом случае на мотор машинки подается не полное расчетное рабочее напряжение, так как вся мощность в данном случае не нужна.
Также ряд регуляторов оснащают так называемой ВЕС-системой (используется чаще всего на регуляторах для низковольтных электромоторов). Эта система позволяет уйти от необходимости установки на модель аккумулятора для радиоаппаратуры и управления (при наличии этой системы радиоуправление запитывается от силового аккумулятора модели).
Мощные регуляторы хода, работающие с повышенным напряжением (от 15 до 36 элементов батарей) имеют гальваническую развязку, предотвращающие попадание импульсных помех на чувствительные входные цепи радиоприемников.
Полезна также и функция PCO (Power Cut Off). Она отключает электромотор от цепи при разряжении силовой батареи ниже установленного уровня. Функция PCO защищает ваш силовой аккумулятор от переразряда. Наличие такой функции крайне желательно для радиоуправляемых летающих моделей (при разряде силовой батареи вы успеете безопасно посадить свою модель до того, как у вас просто исчезнет питание).
Функция ТОР (Thermal Overload Protection) защищает силовые ключи от перегрузки по току, предотвращает тепловое разрушение полупроводников.
От перегрева регуляторы защищает функция TP (Thermal Protection). TP подразумевает наличие термодатчика, который отключает регулятор хода при перегреве.
Система RVP (Reverse Voltage Protection) предупреждает переполюсовку источника питания. Эта функция применяется не часто, так как ее наличие сильно удорожает регулятор и одновременно негативно влияет на его рабочие характеристики.
Подбирая регулятор хода для своей модели, обязательно учитывайте его рабочие характеристики. Выбранный вами регулятор должен (по паспорту) подходить к имеющемуся у вас электромотору и батареям (по типу). Часть регуляторов хода могут работать с аккумуляторами различных типов (тип используемой батареи устанавливается в настройках регулятора).

Следует также учитывать и значение максимального пикового тока (возникает в мгновение старта, например). В паспорте регулятора хода указывается, с какими моторами (по количеству витков) он совместим.
Еще один важный параметр – максимальное рабочее напряжение. Нельзя подавать на регулятор напряжение, выше установленного производителем.
Для расчета потерь энергии важно также знать и внутреннее сопротивление регулятора. Конечно, такие расчеты больше нужны для профессиональных гонщиков, но помните – эта характеристика указывается в паспорте изделия и чем ее значение меньше, тем лучше.
Популярные модели регуляторов хода рассчитаны на работу с многими радиоуправляемыми моделями, поэтому производители предусматривают возможность их регулировки по определенным параметрам.
- изменение фаз трехфазного тока относительно положения ротора.
Кроме этого, следует помнить, что существуют регуляторы хода, конкретно нацеленные на автомодели, авиамодели, модели судов. Их не рекомендуют применять для других типов радиоуправляемых моделей.
Регуляторы оборотов подключаются к силовой батарее и электромотору проводами. Для эффективной долговременной работы очень важно качество этих самых проводов.
Рекомендуется использование многожильных проводов из хорошей радиотехнической меди, достаточного сечения. Сечение проводов должно быть не менее:
- для токов до 80 А – 4 мм.кв.
На профуровне провода между мотором и регулятором хода припаиваются. В любительских моделях эти провода часто крепятся на разъемах.
В силовые провода выключатель, чаще всего, не устанавливается. Как правило, выключатель ставится в цепи питания на приемник и сервомашинки.
Современные регуляторы хода выделяют достаточное количество тепла, поэтому их оснащают теплоотводящими радиаторами и даже кулерами для более эффективного охлаждения.
При использовании моделей, оснащенных несколькими электромоторами, устанавливают или такое же количество регуляторов хода, или один регулятор, обслуживающий несколько электромоторов. В этом случае важно помнить, что максимальный допустимый ток регулятора не должен быть больше, чем суммарный потребляемый ток всех электромоторов, подключенных к регулятору. В любом случае, необходимо ознакомиться, допускается ли такое подключение к регулятору производителем.
Регуляторы хода высокого уровня стоят значительных средств. Поэтому, при выходе регулятора из строя не спешите его выбрасывать, а обратитесь в специализированную мастерскую. Часто сломанные регуляторы можно восстановить, заменив сгоревшие компоненты.
Читайте также: