
Шим управление двигателем постоянного тока своими руками
Обновлено: 07.07.2024
Потребовалось мне сделать регулятор скорости для пропеллера. Чтобы дым от паяльника сдувать, да морду лица вентилировать. Ну и, для прикола, уложить все в минимальную стоимость. Проще всего маломощный двигатель постоянного тока, конечно, регулировать переменным резистором, но найти резюк на такой малый номинал, да еще нужной мощности это надо сильно постараться, да и стоить он будет явно не десять рублей. Поэтому наш выбор ШИМ + MOSFET.
- Тратить такую ценную и дорогую деталь на какой то вентилятор мне западло. Я для микроконтроллера поинтересней задачу найду
- Еще софт под это писать, вдвойне западло.
- Напряжение питания там 12 вольт, понижать его для питания МК до 5 вольт это вообще уже лениво
- IRF630 не откроется от 5 вольт, поэтому тут пришлось бы еще и транзистор ставить, чтобы он подавал высокий потенциал на затвор полевика. Нафиг нафиг.
Остаются компараторы, они не обладают способностью операционника плавно менять выходное напряжение, могут только сравнивать две напруги и замыкать выходной транзистор по итогам сравнения, но зато делают это быстро и без завала характеристики. Пошарил по сусекам и компараторов не нашел. Засада! Точнее был LM339 , но он был в большом корпусе, а впаивать микросхему больше чем на 8 ног на такую простую задачу мне религия не позволяет. В лабаз тащиться тоже было влом. Что делать?
И тут я вспомнил про такую замечательную вещь как аналоговый таймер — NE555 . Представляет собой своеобразный генератор, где можно комбинацией резисторов и конденсатором задавать частоту, а также длительность импульса и паузы. Сколько на этом таймере разной хрени сделали, за его более чем тридцатилетнюю историю… До сих пор эта микросхема, несмотря на почтенный возраст, штампуется миллионными тиражами и есть практически в каждом лабазе по цене в считанные рубли. У нас, например, он стоит около 5 рублей. Порылся по сусекам и нашел пару штук. О! Щас и замутим.
Как это работает
Если не вникать глубоко в структуру таймера 555, то несложно. Грубо говоря, таймер следит за напряжением на конденсаторе С1, которое снимает с вывода THR (THRESHOLD — порог). Как только оно достигнет максимума (кондер заряжен), так открывается внутренний транзистор. Который замыкает вывод DIS (DISCHARGE — разряд) на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю (полный разряд) система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R4->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда мы крутим переменный резистор R1 то у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе.
Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1.
Резистор R3 обеспечивает подтяжку выхода к высокому уровню — так так там выход с открытым коллектором. Который не способен самостоятельно выставить высокий уровень.
Диоды можно ставить любые совершенно, кондеры примерно такого номинала, отклонения в пределах одного порядка не влияют особо на качество работы. На 4.7нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно, видать слух у меня уже не идеальный :(
Покопался в закромах, нашел программку , которая сама расчитывает параметры работы таймера NE555 и собрал схему оттуда, для астабильного режима со коэффициентом заполнения меньше 50%, да вкрутил там вместо R1 и R2 переменный резистор, которым у меня менялась скважность выходного сигнала. Надо только обратить внимание на то, что выход DIS (DISCHARGE) через внутренний ключ таймера подключен на землю, поэтому нельзя было его сажать напрямую к потенциометру , т.к. при закручивании регулятора в крайнее положение этот вывод бы сажался на Vcc. А когда транзистор откроется, то будет натуральное КЗ и таймер с красивым пшиком испустит волшебный дым, на котором, как известно, работает вся электроника. Как только дым покидает микросхему — она перестает работать. Вот так то. Посему берем и добавляем еще один резистор на один килоом. Погоды в регулировании он не сделает, а от перегорания защитит.
Сказано — сделано. Вытравил плату, впаял компоненты:
 |
Сам таймер скрыт массивной тушей транзистора. Пришлось его так загнуть, чтобы не торчал.
Защитный диод, ограждающий полевик от пробоя при обрыве нагрузки я напаял на сам двигатель.
 |
Снизу все просто.
Вот и печатку прилагаю, в родимом Sprint Layout — PWM.lay
Включаю… Тычу осциллографом и вижу такие картинки:
Это на выходе с конденсатора. Тут у нас пила. Изначально я хотел вообще поставить таймер 555 просто как генератор пилы, а ШИМ делать на компараторе, но потом понял, что можно и без компаратора обойтись.
А это напряжение на выходе самого таймера. При разных положениях крутилки
А это напряжение на движке. Видно небольшой переходный процесс. Надо кондерчик поставить в параллель на пол микрофарады и его сгладит.
Как видно, частота плывет — оно и понятно, у нас ведь частота работы зависит от резисторов и конденсатора, а раз они меняются, то и частота уплывает, но это не беда. Во всем диапазоне регулирования она ни разу не влазит в слышимый диапазон. А вся конструкция обошлась в 35 рублей, не считая корпуса. Так что — Profit!
Спасибо. Вы потрясающие! Всего за месяц мы собрали нужную сумму в 500000 на хоккейную коробку для детского дома Аистенок. Из которых 125000+ было от вас, читателей EasyElectronics. Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто. Сейчас идет заключение договора и подготовка к строительству!
А я встрял на три года, как минимум, ежемесячной пахоты над статьями :)))))))))))) Спасибо вам за такой мощный пинок.
424 thoughts on “ШИМ регулятор на таймере NE555”
тини12 и Ко: запайка кучи рассыпухи (555) против восми ног(тини). (12->5 вольт тремя ногами 7805 — не в счёт). Свобода програмного решения и расширяемость.
так что 555 — в топку. хоть и простота.
Не согласен. Мосфет 5ю волтами не поуправляешь:) только если IRL или что то подобное. Но ну их нафиг. Это раз. Рассыпухи не куча, а совсем чуток а схема проста донельзя + не нужно писать прошивку и прошивать. Это два.
взять другой мосфет.
Ну вот и давай подумаем. Есть микруха в копейки ценой и транзистор валяется без дела, но мы пойдем покупать irl какой-нить, тратить тиньку, мудыхаться с прошивкой. По-моему — глупо.
Ну вот и давай подумаем.
555 стоит примерно столько же, сколько тини.
обвязка для 555 на пару рублей.
монтаж обвязки — ещё на пару рублей.
и уже при сотне экземплярах всё это дело вываливается в приличную сумму, которую платить — глупо.
а прошивка пишется за пару вечеров, при этом мирно потягивая коньяк через трубочку.
оно, конечно, спортивно, сделать на подножных компонентах.
Но …
а то можно было и мультивибратор на КТ315 смотрячить. ещё дешевле было б.
Тини13 стоит 45 рублей. Дороже чем вся схема в сборе.
А теперь давай посчитаем:
Тини13 — 45р
панелька под нее еще три рубля
7805 — еще 10рублей
IRL630 — рублей 20
итого 80 рублей против 40
При сотне экземпляров это выливается в 3200р. Совсем не лишние деньги. Учитывая еще, что каждый МК надо воткнуть в программатор и прошить.
какая панелька под тини ?
бери в смд, и не одну, а сотню-другую, вот и дешевле будет.
и почему то время-деньги на монтаж не посчитал.
и всё таки про мультивибратор : было бы ещё дешевле на трёх транзюках. раз уж так жаба душит.
В любом случае их надо запрограммировать вначале. А монтаж что тини, что 555 получается один. Но 555 проще.
Можно было и на транзюках, кстати. Чет не подумал. Давно с дискреткой не работал.
харэ флудить :)
давай лучче тему ещё какую…
например, про камеру какую подключить к AVR-ке :)
А для чего? (распознавание изображения? как датчик движения? Поиск цветных кубиков? захват кадров (типа фотоаппарата)? Наведение на обьект? показ картинки на ЖК дисплее 128х64 точки? или еще чего?)? Зачем AVRке камера? Камере, особенно с радиоканалом, лучше с компом напрямую работать.
Была бы у меня еще камера. Да и смысл? Мощи авр все равно не хватит, чтобы адекватно обработать видео поток.
Так и я про то же. Правда, камер у меня полно. Но вроде камера, да еще с радиоканалом, вполне самодостаточна. Только успевай ей вертеть. А прилепить можно на что угодно.
Но вроде камера, да еще с радиоканалом, вполне самодостаточна.
ну дак есть камера(цифровая)..(халява) и сделать на авр радиоканал (тини например) с пособность легкого шифрования а не тупо AVсигнал
или сделать веб камеру..
или нетак?
> При сотне экземпляров это выливается в 3200р.
Вы хотите китайцев по цене сделать? А хрен вам — не сможете. И какой тогда смысл считать копейки? Если уж давиться жабой на копейки, можно вообще ничего не делать и посадить вентиляторы на 5 или 7 вольт. А то что не совсем оптимально — и черт с ним, если экономия — самое главное.При этом решении вообще ничего паять и программировать не надо ;)
Как бэ делаю частенько. На том до чего их шаловливые рученки еще не добрались. На этом и живу.
Не DI HALT мыслит реально. Почему? В 555-м стоит интегр.усил. и он один. Эффективно ставить их в плату где-то до двух(требуют много обвязки, времязадающей). Более их ставить не выгодно. Пример.Раньше собрал сигналку на 555(реализаия цепочки таймеров от выхода из машины,до входа и отключении её).Ушло три 555-х и 18 элементов!Плюс афигенный печ.монтаж и часа 2 настройки времязадания.И какой вывод у Вас?!
Завидую вам у нас тини 13 стоит 95
На тиньке так просто не получится. Без АЦП и ШИМа придется извращяться с клавиатуркой какой-никакой, да хотя-бы кнопкой НО перед ручкой потенциометра можно наклейку со шкалой забацать, а на ручке риску поставить — соответственно на глаз регулировать скважность можно + программный ШИМ.
МК в топку. Сравни макс. частоту работы:
для мк(тини13. даже для мельком упомянутых 24МГц): 24МГц/256 = 93,75КГц (самый шустрый из режимов, самая высокая частота работы ШИМ)
для 555 — ок 360 КГц.
Вдобавок, гонять полевики на, максимум, 5В напряжения на затворе — это уже что-то с чем-то.
Ф топпку твой тини. Нахера мне еще и о 5 вольтах думать, если двигун на 12 Вольт? А тут зацепил и регулируй. Блин, даже в профессиональных шуруповертах стоят 555, а не твой соаный тини
Схема регулятора основанного на широтно-импульсной модуляции или просто ШИМ, может быть использована для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала при помощи ШИМ дает большую производительность, чем при использовании простого изменения постоянного напряжения подаваемого на двигатель.
Шим регулятор оборотов двигателя
Двигатель подключен к полевому транзистору VT1, который управляется ШИМ мультивибратором, построенным на популярном таймере NE555. Из-за применения таймера NE555 схема регулирования оборотов получилась достаточно простой.
Как уже было сказано выше, шим регулятор оборотов двигателя выполнен с помощью простого генератора импульсов вырабатываемого нестабильным мультивибратором с частотой 50 Гц выполненного на таймере NE555. Сигналы с выхода мультивибратора обеспечивают смещение на затворе MOSFET транзистора.


Часовой пояс: UTC + 3 часа
Простой ШИМ-регулятор на 220 В 10А.
А чем тиристор или симистор не угодил?
При токе 10А на полевиках будет падать около 5 вольт, плюс на диодном мосту 2 вольта. При токе 10А это почти 70вт потерь, радиатор с табуретку. На симисторе при том же токе упадёт менее 2 вольт, потери менее 20 вт.
_________________
Хоть оптика и увеличивает изображения но, глядя через оптический прицел, все проблемы мельчают.
JLCPCB, всего $2 за прототип печатной платы! Цвет - любой!
В некоторых случаях смысл возможно есть, тиристоры не любят работать на коллекторные двигатели, иногда с этим приходится изрядно помучится. А полевики в качестве ключей в данной схеме конечно не целесообразны имеет смысл переделать схему на биполяры, потери будут существенно меньше.
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
Согласен. Ну я конечно загнул про 10 ампер, это я имел ввиду на будущее.
Реально у коллекторного двигателя от стиралки рабочий ток в пределах 2-3 ампер. В общем для этого двигателя я и делаю регулятор.
Так что тепловые режимы будут в норме.
А во-вторых - элементная база очень быстро совершенствуется - те-же полевики . Вот посмотрел сейчас - новые есть 18N50
У них по сравнению с IRF840 и ток побольше и сопротивление в 4 раза меньше ( 18A, 500V, RDS(ON)=0.265Ω @ VGS=10V )
Необходим быстродействующий преобразователь питания средней мощности с высоким КПД? Он должен быть компактным и недорогим? Решение – карбид-кремниевые модули средней мощности WolfPACK производства Wolfspeed. В статье рассмотрены основные особенности модулей WolfPACK и показано, что переход на эту универсальную и масштабируемую платформу позволяет не только быстро разработать новые устройства, но и без значительных затрат времени и средств модернизировать уже существующие схемы на традиционной элементной базе.
А полевики в качестве ключей в данной схеме конечно не целесообразны имеет смысл переделать схему на биполяры, потери будут существенно меньше.
у высоковольтных биполярников Н21 низкий им нужен будет большой ток базы, а это усложнит схему, нужен будет низковольтный источник питания ампера на 2.
_________________
Хоть оптика и увеличивает изображения но, глядя через оптический прицел, все проблемы мельчают.
Приглашаем 27/01/2022 всех желающих посетить вебинар, посвященный двум наиболее растущим сегментам интегрированных источников питания – AC/DC малой мощности (1-20Вт) и сегменту решений PoL без изоляции. На вебинаре рассмотрим проблему выбора AC/DC в бюджетном сегменте и концепцию тестирования ускоренного старения, проведем сравнительный анализ подходов к интеграции AC/DC модулей. Сделаем обзор решений концепции POL с доисторических времен до современных технологий и средств для разработки и тестирования.
Схема может реализовать в двигателе постоянный ток, но при наличии жёсткого DC звена. А так получаются регулируемые по общей амплитуде выпрямленные полуволны. Это немногим лучше, чем регулирование по углу отпирания, но сеть имеет уже достаточную индуктивность для подкачки тока на двигатель с частотой 10-15кГц. Это помехи и перенапряжения. Нужно ставить развязывающий конденсатор. Оптрончик 817 на мой взгляд медленный для драйвера.

Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.

Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.

У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.

На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.

Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
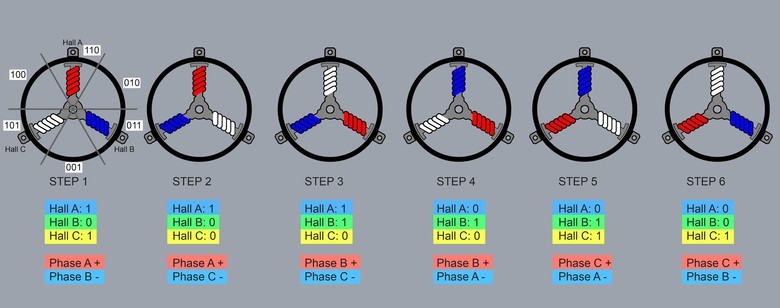
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.

Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.

Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
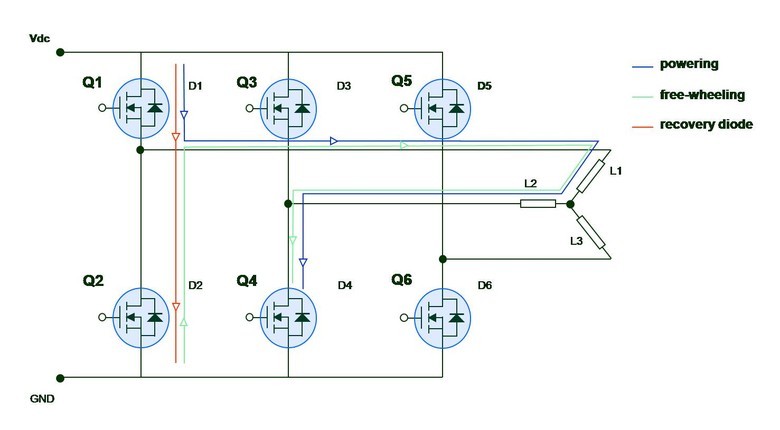
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.

Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:


И готовый результат
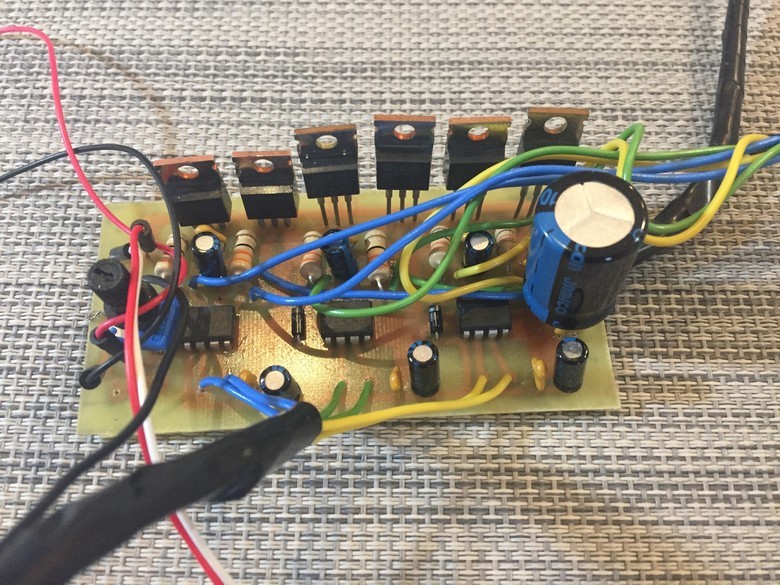
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.

Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.


- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035


Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Читайте также: