
Ремонт драйвера шагового двигателя своими руками
Обновлено: 04.07.2024
Шаговый двигатель используется в машинах для точного перемещения. Наладим управление шаговым двигателем через USB с компьютера своими руками. Нам потребуется:
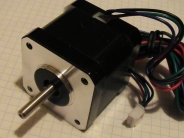
1) Шаговый двигатель, возьмем - Nema23 76 мм, вместо него может быть другой, управлять будем биполяным методом, любой гибридный и биполярный шаговый двигатель будет работать с таким же управлением.
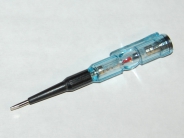
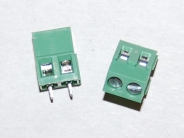
2) Блок питания, возьмем - импульсный блок питания мощностью 360W с выходным напряжением 24V / 15A, может использоваться любой другой блок питания, если будет достаточно мощности и напряжения для работы двигателя. Более мощному двигателю будет нужно больше напряжения. Предел напряжения нашего драйвера ограничивается максимальным напряжением, которое выдерживают транзисторы, это 100V, у нас блок питания на 24V. В случае большего напряжения транзисторы в схеме необходимо заменить на более мощные, также при увеличении напряжения, транзисторы могут начать греться, если такое случилось, необходимо дополнительно обдувать их куллером (у меня все в порядке и куллер не требуется). Для подключения блока питания к сети 220V также нужен шнур и нужно определить где в вашей розетке ноль, а где фаза. Контакт блока N подключается к нулю, а L к фазе, также можно подключить заземление (но не обязательно). Определение возможно при помощи индикаторной отвертки, у меня определилось, что слева ноль, а справа фаза.



Как крутить шаговый двигатель
Шаговый двигатель работает от подачи комбинаций напряжения в разных направлениях на его обмотки, у этого шагового двигателя 2 обмотки - 4 провода, первая обмотка - черный (A) и зеленый (A*) провод, вторая обмотка - красный (B) и синий (B*). За одну смену комбинаций делается 1 шаг - 1,8 градусов. Если комбинации быстро менять, то двигатель будет быстро и точно позиционироваться - крутиться. Смена комбинаций возможна в двух направлениях, соответственно двигатель будет крутиться вперед или назад.
Чтобы крутить шаговый двигатель, надо:
1) Собрать устройство - USB контроллер шагового двигателя на микроконтроллере AVR и драйвер шагового двигателя, 2 в 1. Перед тем как собирать это сложное устройство, рекомендую сначало отдельно собрать и проверить работу только USB контроллера, его я уже собрал вот тут - контроллер USB. Если USB связь работает нормально, то можно приступать к изготовлению драйвера.
2) Написать программу для компьютера, которая будет посылать USB команды устройству.
3) Написать программу для микроконтроллера AVR, которая будет принимать USB команды и крутить двигатель.
USB контроллер шаговых двигателей и USB драйвер шагового двигателя
Взятый нами двигатель является гибридным и поддерживает несколько вариантов управления. Управлять двигателем будем биполярным методом и соответственно собираем мы драйвер биполярного шагового двигателя с USB контроллером. Сначало покажу готовый результат, а потом подробно рассмотрим его. Вот фото собранного драйвера шагового двигателя с USB управлением, который я собрал:
Драйвер шагового двигателя с USB управлением своими руками
Схема драйвера биполярного шагового двигателя и USB контроллера (схема длинная и нуждается в прокрутке для просмотра):
Драйвер шагового двигателя USB на микроконтроллере AVR своими руками









Дополнительно нужно (нет в наличии):
1) Модуль питания DC-DC SMAU01L-12 (вместо него пойдет любой конвертер DC-DC с 5V до 10V-15V) - 1 шт., возможно можно без него, от 5V питать (не проверено)
Главным компонентом схемы является программируемый микроконтроллер AVR - ATmega16A, если вы не знаете как с ними работать (записывать программу), сначало ознакомьтесь с основами такой работы, которые подробно описаны в первой статье
управление машиной. Для устройства можно использовать и другой микроконтроллер AVR, я выбрал ATmega16A, т.к. в нем с запасом имеется много памяти и контактов для подключения нескольких двигателей и большого количества рабочих инструментов.
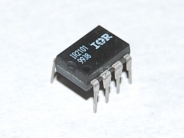
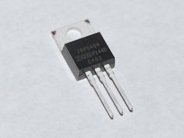
Управление двигателем подключается к контактам PB0, PB1, PB2, PB3, на остальные свободные P-контакты можно в будующем подключить еще двигатели и рабочие инструменты, но пока они пустуют. Микроконтроллер ATmega16 отдает команды и обрабатывает USB сигналы после того как в него записана программа (ниже она будет написана). После него идет конструкция из микросхем IR2102 и транзисторов IRF540N (2 так называемых H-моста) - она приводит шаговый двигатель в движение.
Драйвер IR2101 нужен для преодаления большой емкости затвора транзистора IRF540N, что позволяет открывать и закрыть транзистор с большой скоростью (например принимать сигнал ШИМ, которым может регулироваться скорость двигателя при необходимости - об этом сигнале дальше напишу), что нам и нужно. К сожалению для питания этого драйвера необходимо 10-15V, у нас есть только 5V от USB. Поэтому пришлось поставить компонент DC-DC SMAU01L-12, который преобразует 5V в 12V, вместо него можно использовать любой другой способ получения такого напряжения, например, при помощи трансформатора или любым другим путем. К VCC подключается +12V, к COM -12V. Один драйвер работает с 2мя транзисторами - верхним (H) и нижним (L). Контакты HIN и LIN - входной сигнал с микроконтроллера для верхнего и нижнего транзистора, по этому сигналу транзисторы открываются и закрываются. HO и LO - это выходные сигналы, транзисторы подключаются гейтами (G) к этим контактам. Они подключаются не просто так - справа на линиях 2 резистора 10/100 Ом и диод, они нужны для нормальной работы транзисторов - чтобы они замедлялись при открытии и не замедлялись при закрытии, эти транзисторы слишком быстро открываются и это может вызвать проблемы. Диод и конденсаторы 3300 пФ - нужны для работы драйвера IR2101 согласно документации на эту микросхему.
Каждая обмотка (фаза) двигателя (у двигателя 2 обмотки A и B - 4 контакта) подключается к H-мосту из транзисторов IRF540N. H-мост - это специальная схема соединения транзисторов, которая позволяет подавать через них напряжение высокого уровня (24V) в разных направлениях. Один мост изготавливается из 4-х транзисторов. В итоге здесь вы видите 2 H-моста, которые позволяют гонять разнонаправленное напряжение высокого уровня по 2м обмоткам двигателя и тем самым крутить его.
Обратите внимание, что в мосту - HIN верхнего драйвера соединяется с LIN нижнего драйвера, а LIN верхнего с HIN нижнего. Это сделано для одновременной подачи сигналов. Если вы включили HIN сверху, то обязаны включить LIN с низу, иначе произойдет короткое замыкание. Такое подключение позволяет автоматом включать пару. Впрочем короткое замыкание все же возможно, если вы откроете и HIN и LIN на одном мосте, поэтому не допускайте этого. На контактах PB0 - PB3 допустимы только значения 0000, 1010, 0110, 0101, 1001. Их перебор крутит двигатель. Подача других значений скорей всего приведет к короткому замыканию моста.
Мощные резисторы с низким номиналом 0.1 Ом и высокой мощностью (3-5 Вт) нужны для защиты от высокого тока - это шунты. Если что их можно снять и заменить простым соединением с минусом питания, если например не будет хватать мощности. Для слабых резисторов мощность берется от тока USB: 0.05 А * 5 V = 0.25 Вт (ток USB задается программно, по умолчанию в нашей программе стоит 0.05). Черная полоска на диодах соответствует вертикальной линии на схеме.
Шаговый двигатель и блок питания подключаются к H-мостам, как показано на схеме. Минусы питания 24V, 12V и 5V соединяются. Между плюсом и минусом 24V линии ставится сглаживающий пленочный конденсатор.
В итоге нашёл непропай:

Убедился что у обоих обмоток сопротивление по 2 Ома.

Собрал всё работает как положено. Так что при подобных проблемах с движком, не спешите настраивать ток драйверов, не забывайте проверять сопротивление обмоток ШД.
Эмиль
у меня греется все движки на 3020 4 оси я ставлю дрова 6600 и там меняю ток почему именно изза сопротивления греются ?!
Efenia
это драйвера такие: вот что о них пишут:
+ Дешевые
+ Уверено работают на напряжении питания до30В (выше 36в бывало и умерали ). А значит на скорости высокие не рассчитывайте.
- Маленький микрошаг
- Периодический звон в обмотках при удержании
- Сильный нагрев чипа даже на номинальном токе
- Сильно греются резисторы (насколько помню данную плату , они греются сильнее микросхемы с радиатором)
- Любят сдохнуть от обратной ЭДС обмоток. (потому питать их паспортной максималкой 42вольта не рекомендую).
Если хотите получше ознакомится с данными драйверами, то можете почитать здесь
Эмиль
TB6600 нормально работают
а вот от родных грееться моторы
а тут смотрю что пишут что 2ома должно быть сопротивление
Efenia
TB6600 нормально работают
а вот от родных грееться моторы
а тут смотрю что пишут что 2ома должно быть сопротивление
не пугаю, вот еще статейка об этих драйверах
У меня 3 таких на экструдерах прутка, работают нормально, но там напряжение 24 вольта всего, да и скорость 30 оборотов в минуту через редуктор 1:15 итого всего 450 оборотов в мин.
Alsan
TB6600 нормально работают
а вот от родных грееться моторы
а тут смотрю что пишут что 2ома должно быть сопротивление
magneto
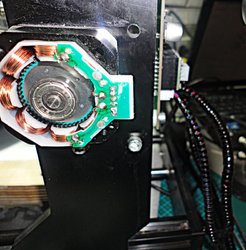
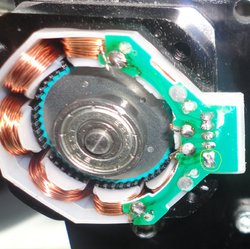
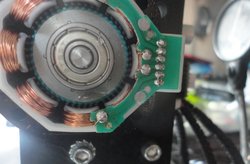
Пару слов о самих гибридных шаговых двигателях. В роторе стоит магнитная шайба между двух зубчатых венцов. В давние времена эти шайбы делали из кобальт-самариевого сплава, который не боится коррозии (такие движки живут долго и счастливо). Теперь практически все магниты делают из сплава неодим-железо-бор. Этот сплав чрезвычайно коррозионно не стоек. Чтобы предотвратить коррозию, изделия покрывают никелем. Но это не всегда помогает - тонкий слой никеля имеет поры (для хорошей коррозионной защиты нужно двухслойное покрытие медь-никель, где поры одного слоя перекрыты другим слоем). В процессе транспортировки, сборки и т.п. могут повредить покрытие. В результате, в сырой и агрессивной атмосфере, магнитный сплав превращается в бурый порошок, который забивает пространство между ротором и статором. Неоднократно наблюдал такую неисправность в ФНА совмещенных с проявочным процессором, или хранившихся в неотапливаемых помещениях. Лечится заменой магнитной шайбы.
Nickoperator
Пару слов о самих гибридных шаговых двигателях. В роторе стоит магнитная шайба между двух зубчатых венцов. В давние времена эти шайбы делали из кобальт-самариевого сплава, который не боится коррозии (такие движки живут долго и счастливо). Теперь практически все магниты делают из сплава неодим-железо-бор. Этот сплав чрезвычайно коррозионно не стоек. Чтобы предотвратить коррозию, изделия покрывают никелем. Но это не всегда помогает - тонкий слой никеля имеет поры (для хорошей коррозионной защиты нужно двухслойное покрытие медь-никель, где поры одного слоя перекрыты другим слоем). В процессе транспортировки, сборки и т.п. могут повредить покрытие. В результате, в сырой и агрессивной атмосфере, магнитный сплав превращается в бурый порошок, который забивает пространство между ротором и статором. Неоднократно наблюдал такую неисправность в ФНА совмещенных с проявочным процессором, или хранившихся в неотапливаемых помещениях. Лечится заменой магнитной шайбы.
Хотелось бы подробнее о конструкции ротора. Магнитная шайба не входит внутрь зубчатых венцов? Хотелось бы переделать двигатель на полый вал ротора с фланцем.
Efenia
Пару слов о самих гибридных шаговых двигателях. В роторе стоит магнитная шайба между двух зубчатых венцов. В давние времена эти шайбы делали из кобальт-самариевого сплава, который не боится коррозии (такие движки живут долго и счастливо). Теперь практически все магниты делают из сплава неодим-железо-бор. Этот сплав чрезвычайно коррозионно не стоек. Чтобы предотвратить коррозию, изделия покрывают никелем. Но это не всегда помогает - тонкий слой никеля имеет поры (для хорошей коррозионной защиты нужно двухслойное покрытие медь-никель, где поры одного слоя перекрыты другим слоем). В процессе транспортировки, сборки и т.п. могут повредить покрытие. В результате, в сырой и агрессивной атмосфере, магнитный сплав превращается в бурый порошок, который забивает пространство между ротором и статором. Неоднократно наблюдал такую неисправность в ФНА совмещенных с проявочным процессором, или хранившихся в неотапливаемых помещениях. Лечится заменой магнитной шайбы.
Что за страсти вы рассказываете? У меня 3д принтер с китайскими шаговиками нема 17 1,5А 7 лет стоит в неотапливаемой терраске, и не позднее чем вчера этот принтер вполне себе нормально печатал, а в терраске дачного дома зимой и по -20 бывает, да и влажность прямо скажем уличная, если печатать зимой нужно, единственное что делаю это в дом заношу (с -20 до +20) и часик даю на прогрев, и то это больше из за конденсата на плате управления, про движки даже никогда и не парился.
Можно ли разбирать ШД и влияет ли микрошаг на момент - тесты
Можно ли разбирать ШД и влияет ли микрошаг на момент - тесты
Данные две темы активно муссировались на форуме, люди-теоретики тоннами выкладивали чужие цитаты, формулы и графики, но в конечном счёте всё сводилось к банальному срачу и банальным попыткам доказать, что каждый из спорщиков самый умный. Решил я пойти эмпирическим путём попытаться на деле проверить, что же есть правда в этом вопросе.
В тестировании учавствовали :
Станочек 20*20, к оси Z прикрепил электронные весы-"безмен", второй конец прикрепил с к столу.
Шаговые двигатели на 42 мм одинаковые по массо-габаритным характеристикам, один новый китайский Sumtor на ток 1,3 Ампера и б/у шный японский Vexta с рабочим током 1,2А, предположительно 93 года выпуска.
Внизу в окошке программы есть пункт "InternerPulser", который позволяет крутить движком с разной скоростью, его и использовал.Крутил на максимальной скорости, 600 об/мин.
Усилие поднятия оси измерял для каждого режима ( шаг, полушаг, 1/8) по 4 раза, потом выводил среднее, в табличке есть.
Сначала запытал китайский двигатель, потом разобрал его, полежал полчасика, засунул ротор обратной стороной, вытащил, попримагничивал в валам для пущего экстрима.
Потом собрал и запытал в режиме полушага.
То же самое проделал с японческим, ток оставил тот же, небольшое превышение не опасно :
Только в режиме полного шага, не думаю, что это принципиально.
Результаты тестирования сведены в таблицу :

В левой колонке замеры килограммов, которые выдал станок в момент остановки ШД. Красным цветом выделены результаты после разборки ШД.
Итак, выводы такие :
1. Дробление шага не влияет на крутящий момент, во всяком случае -незначительно.
2. Разборка шагового двигателя не приводит к ухудшению его характеристик.
3. Новый китайский ШД лучше старого японского, крутящий момент больше при том же токе, к тому же "японец" больше нагрелся.




Пункт первый (набившим плату можно не читать J ). После травления, лужения, и сверловки, внимательно осмотрите всю плату на предмет косяков. Сопли, протравленные дорожки, и т.д. могут серьезно обломать весь кайф. Далее набиваем плату, сначала все перемычки, затем сопротивления, диоды, панели, емкости и биполярные транзисторы. Хочу обратить особое внимание на Ваше внимание, извините за… Не ленитесь перед впайкой проверить деталь на исправность. Прозвонка иногда спасает от дыма… Я зная цветовую кодировку резисторов на ура, подкалывался несколько раз, причем со спец. эффектами. Когда используешь резисторы из загашников которые годами выпаивались из всего что под руку попадет, забываешь, что при нагреве красный может стать оранжевым, а оранжевый - желтым… Впаиваем провода питания +5В, степ, GND , и провода контроля Vref . Примерно вот так это выглядит:

Пункт второй (настраиваем режимы работы и удержания). 555 я лично впаиваю в плату, кто поставил панель, значит втыкаем, блок индикации должен быть отключен. Подстроечники на середину. Вывод степ замыкаем на общий (раб. режим). Прозваниваем цепь +5В и если нет короткого, включаем питание. Тестер подключен к контрольным точкам Vref (молодец Dj _ smart , предусмотрел на плате), если номиналы подстроечников и сопротивления между ними соответствуют схеме, то подстроечником раб. режима можно регулировать напряжение около 0 – 1В т.е. ток 0 – 5А. Настроим на 1А. Тут все просто. R изм. у нас 0,2 Ом. Нам нужен 1А. 0,2х1=0,2В. Т.е. если мы установим Vref – 0,2В, ток в обмотке будет 1А. Если нам нужен ток в обмотке скажем 2,5А, то Vref =0,2х2,5=0,5В.
Короче мы выставили 0,2В.

Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:

Главное обратите внимание на обязательную задержку при переключении. При замыкании степ на общий, мгновенно должен включаться рабочий режим, а при размыкании уходить на удержание с задержкой 0.5с. Если задержки нет ищите проблемы, иначе при работе будут не хилые глюки. Если не заводится, идите в тему форума, не устраивайте пожаров J .
Пункт третий (настраиваем блок индикации). Печатка разведена под 315-361, как и у Dj _ smarta тоже мешок, надо куда то паять… Но в принципе туда можно паять любую пару, из наших я испытывал 502 – 503, 3102 – 3107, все пашет, только будьте внимательны с цоколевкой! Если все правильно впаяно и рабочее, то работает без проблем. Индикация вносит небольшую корректировку в Vref , так что после подключения индикации, окончательно отрегулируйте ток под свой ШД (лучше для начала 70% от номинального). Фотки как горят светодиоды делать не стал J .
Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:

Либо на 16 ноге, он такой:

Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ. Это важно. Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы.
Пункт пятый. Опять выключаем питание и вставляем IR , впаиваем полевики. При использовании ШД с током обмотки более 2,5А, необходимо полевики вынести на радиатор. Обратите внимание при впайке диодов, они могут различаться по меткам. Мне правда не встречалось (у меня в перемешку 522 и 1 N 4148 (аналог) у них цоколевка совпадает) Но учитывая что людям IR с неправильной логикой работы попадаются, будьте внимательны. По цепям питания проверяем на коротыш, проверяем монтаж. Я сразу включал все питание, только вместо ШД припаивал соединенные встречно параллельно светодиоды:

Если они шагают, значит все ОК, подрубаем мотор, подключаем к ЛПТ или интерфейсной плате с опторазвязкой (кому как нравиться) и балдеем .

Данное описание не претендует на бестселлер, оно может дополняться и критиковаться но только по существу…
Проверяем L297 с помощью ТМ2
Короче суть прикола .

Шим у нас около 20кГц. Не услышим. Собираем на ТМ2 делитель на 2, при 10 кгц - уже будет пищать на всю. Вот схема
Вывод 3 соединяем с выводом 1 L297. Вывод 5 через конденсатор 0,01-0,1 мкф на наушник, второй конец наушника - на массу. Тэкс. Да, питание у неё - 14-я +5, 7-я - масса. Остальные ноги оставляем свободными.

Читайте также: