
Контроллер асинхронного двигателя своими руками
Обновлено: 08.07.2024
Самостоятельная разработка частотника для трехфазного электродвигателя, дело достаточно затратное и хлопотное. Но если есть желание и интерес к данной теме огромен, то можно попробовать. Данный пост не
претендует на оригинальность и писатель из меня честно говоря плохой. Итак обо всем по порядку.
Начнем с общей структурной схемы.
Данная структурная схема построена по так называемой схеме двойного преобразования. Трехфазное напряжение 380В частотой 50 Гц поступает на вход неуправляемого выпрямителя. На выходе выпрямителя напряжение составляет около 540 В. Это и есть первый этап преобразования. На втором этапе напряжение при помощи инвертора преобразуется в широтно-модулированные импульсы, которые и поступают на обмотки электродвигателя. Статорные обмотки имеют активно-индуктивный характер сопротивления и являются фильтрами, сглаживающими ток. Среднее значение тока будет зависеть от среднего значения приложенного напряжения, то есть от соотношения длительностей внутри периода ШИМ. Блок управления реализует основные алгоритмы управления инвертором. Обеспечивает диагностику силового модуля, а также выполняет функции противоаварийной защиты. Блок питания предназначен для питания цепей управления.
Выпрямитель.
Схема выпрямителя предельно проста.
На вход силового блока поступает трехфазное напряжение сети амплитудой 380 В, и частотой 50 Гц. Для защиты от перенапряжения в схеме используются варисторы VR1- VR3. Далее входное напряжение поступает на выпрямитель с промежуточным звеном постоянного тока. Выпрямитель 36МТ160 представляет собой трехфазную мостовую схему (т.н схема Ларионова) конструктивно выполненную в одном модуле.
Во время зарядки конденсатора промежуточного контура протекает очень большой кратковременный ток. Это может вывести из строя выпрямитель. Ток зарядки ограничивается включением балластного резистора R4 последовательно с конденсаторами DC-звена, который активизируется только при включении преобразователя. После зарядки конденсаторов резистор шунтируется, контактными реле К1. Большая емкость конденсаторов требуется для сглаживания напряжения промежуточного звена. После выключения инвертора из сети, конденсаторы сохраняют высокое напряжение в течение определенного времени.

Вот что получилось в итоге.
Блок питания.
Собран на микросхеме UC3843. Вообще, что касается блока питания, то вовсе не важно какой будет использован.
Хоть самодельный хоть купленный. Главное, на мой взгляд, по возможности питание драйвера IGBT и питания блока управления было от отдельных обмоток трансформатора.

Инвертор.
Схема инвертора.



Все это протестировано, проверено и ждет изготовления блока управления. Будем надеется что у меня хватит терпения, времени и сил довести этот проект до работающего прототипа.
Комментарии ( 118 )
Люто плюсую=))
Сам пару лет назад помогал другу с подобным пепелацом…
На каком камушке систему управления будете делать?
Мне попадались апноты где мегой простинькой все крутилось… тут уж зависти какой функионал заложить хотите и для чего делаете
Вот еще что, забегая далеко на перед, скалярную(намного проше в реализации) или векторную системы управления реализовывать будете?
Схемы любительских частотных преобразователей
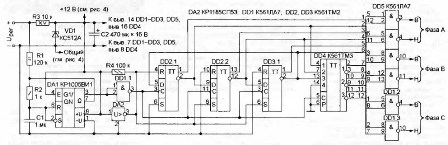
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.
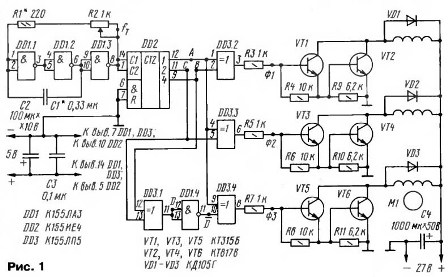
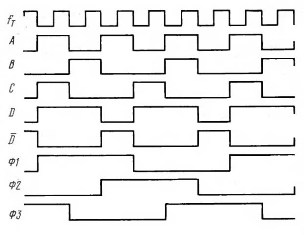
Рисунок 2. Временные диаграммы импульсов генератора.
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.
Подключение двигателя к выходу трехфазного инвертора
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.
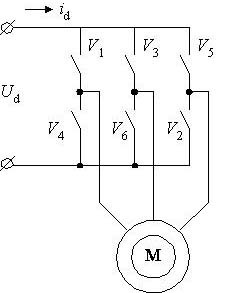
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
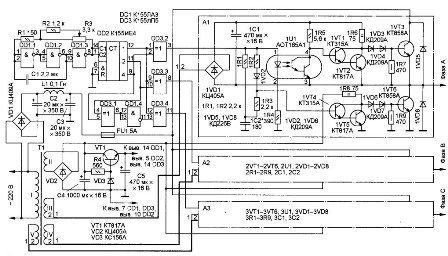
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя на диодном мосте VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.
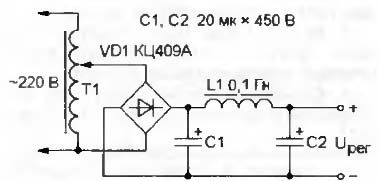
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант NE555). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.
В той же журнальной статье автор предлагает вариант задающего генератора, который позволяет избавиться от использования автотрансформатора. Схема генератора показана на рисунке 7.
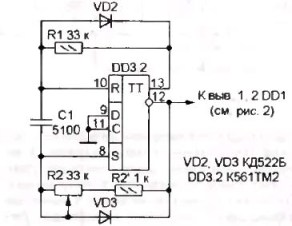
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных промышленных частотных преобразователях большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.
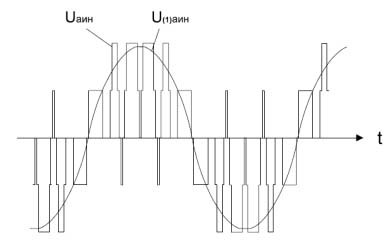
Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе мощные транзисторы структуры MOSFET или IGBT, специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.
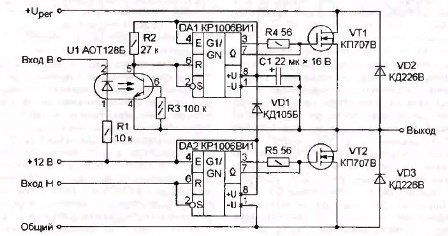
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.
STM32F частотный преобразователь для трёхфазного асинхронного двигателя.
В данном проекте в отличие от предыдущего будут использованы более продвинутые основные компоненты это конечно контроллер STM32F030C8 и драйвер силовых ключей IR2136 а вот драйвер LCD TM1628 был заменен с TM1638 просто из за дешевизны, в статье я тоже покажу принципиальную схему своего устройства, код программы, проект написанный для IAR который сможете запустить в компиляторе и конечно попробую всё это описать.
Но НЕ выкладываю печатную плату потому что возможно допущены нарушения разводки силовой части которые могут быть опасны поэтому предлагаю включить голову и сделать самим!
Драйвер IR2136 и дополнительных сведения о несущей частоте.
Давайте разберем эти две проблемы, первая решается просто перед пуском мотора мы должны выключить верхние ключи а нижние включить, переждать некоторое время пока зарядятся конденсаторы bootstrap схемы( на рисунке ниже C2-C4 ёмкостью 4.7u).

И немного о выборе несущей частоты генерации ШИМ, в частотных преобразователях с мощностью от 0.4 кВт до 4 кВт используются несущая частота в районе до 8 кГц и для мощностью более 5.5 кВт не должна превышать 4 кГц, что гарантирует самые низкие потери в преобразователе. Частота выбирается из рекомендуемого диапазона в зависимости от мощности двигателя, чем мощней тем ниже частота. Высокие частоты переключения создают в преобразователе дополнительное тепло, которое уменьшает срок службы преобразователя, потери являются результатом искажений в кабелях двигателя при высоких частотах. Это означает, что если бы преобразователь работал на более низкой частоте переключения, он мог бы обслуживать двигатель при меньших затратах энергии или обслуживать более крупный двигатель, но слишком сильное занижение частоты вызывает резонанс магнитных полей в статоре и роторе двигателя на определённых скоростях вращения, что приводит к вибрациям.

Схема устройства.
Устройство состоит из двух плат, платы управления и силовая часть.


И фотографии плат, как получилось у меня.


Код программы.
Основная часть программы где происходит всё управление работой частотного преобразователя, для IAR качаем готовый проект STM32_3_fase_moto.
int main() RCC_DeInit();
FLASH_PrefetchBufferCmd( ENABLE);
FLASH_SetLatency( FLASH_Latency_1);
RCC_PLLConfig( RCC_PLLSource_HSI_Div2, RCC_PLLMul_12);//SYSCLK=4Мгерц*12=48Мгерц.
RCC_PLLCmd( ENABLE); //Доступ к PLL разрешен.
while( RCC_GetFlagStatus( RCC_FLAG_PLLRDY)== RESET);//Ждем пока PLL не будет готов.
RCC_SYSCLKConfig( RCC_SYSCLKSource_PLLCLK); //Выбираем PLL как источник частоты.
while( RCC_GetSYSCLKSource()!= 0x08);//Ждем пока PLL не станет источником.
//Включаем тактирование выводов TIM1, LCD и управления IR2136.
RCC_AHBPeriphClockCmd( RCC_AHBPeriph_GPIOA |RCC_AHBPeriph_GPIOB, ENABLE);
//Настраиваем контроллер для работы с LCD.
Init_Lcd( );
//Настраиваем TIM1 и его выводы для работы с IR2136.
Init_Tim1( );
//Настройка выводов ENABLE ir2136 и включение реле питания ключей.
GPIO_InitTypeDef gpio_control;
gpio_control.GPIO_Pin= GPIO_Pin_9| GPIO_Pin_8;//Вывод включение реле и вывод включение ENABLE IR2136.
gpio_control.GPIO_Mode= GPIO_Mode_OUT;
gpio_control.GPIO_OType= GPIO_OType_PP;
gpio_control.GPIO_PuPd= GPIO_PuPd_NOPULL;
GPIO_Init( GPIOB, &gpio_control);
GPIO_ResetBits( GPIOB, GPIO_Pin_9);//Выключаем реле питания силового модуля.
GPIO_SetBits( GPIOB, GPIO_Pin_8);//Включаем ENABLE IR2136.
for( uint32_t i=0; i //Отображаем на LCD начальное состояние частотника.
Display_Rotation_Lcd( work, 0);
while( 1) for( uint32_t i=0; i //Сканирование кнопок.
scan_button= Scan_Button_Lcd();
for( uint32_t i=0; i //Меняем направление.
case 4:
work= 1;
if( TIM1->BDTR & TIM_BDTR_MOE)< Display_Rotation_Lcd( work, 5);>else< Display_Rotation_Lcd( work, 0);>
break;
//Меняем направление.
case 8:
work= 0;
if( TIM1->BDTR & TIM_BDTR_MOE)< Display_Rotation_Lcd( work, 5);>else< Display_Rotation_Lcd( work, 0);>
break;
//Остановка частотника.
case 16:
Stop_Pwm_Tim1( );
Display_Rotation_Lcd( work, 0);
break;
//Экстренное торможение.
case 32:
work= 2;
Display_Rotation_Lcd( 0, 0);
break;
//Пуск частотника.
case 64:
Start_Pwm_Tim1( );
Display_Rotation_Lcd( work, 5);
break;
default:
//По умолчанию.
break;
>
>
return 0;
>
void TIM1_BRK_UP_TRG_COM_IRQHandler( void) //Прерывание от аварийной ситуации в драйвере IR2136.
if( TIM_GetFlagStatus( TIM1, TIM_FLAG_Break)) TIM_ClearFlag( TIM1, TIM_FLAG_Break);
TIM_Cmd( TIM1, DISABLE);
>
//Прерывание от переполнения периода TIM1.
if( TIM_GetFlagStatus( TIM1, TIM_FLAG_Update)) TIM_ClearFlag( TIM1, TIM_FLAG_Update);
//Вращение в одну сторону.
if( work== 0) TIM_SetCompare1( TIM1, Sin_pwm_tab[ Fase1]);
TIM_SetCompare2( TIM1, Sin_pwm_tab[ Fase2]);
TIM_SetCompare3( TIM1, Sin_pwm_tab[ Fase3]);
Fase1++;
Fase2++;
Fase3++;
if( Fase1== 60) Fase1=0;
if( Fase2== 60) Fase2=0;
if( Fase3== 60) Fase3=0;
> //Вращение в другую сторону.
if( work== 1) TIM_SetCompare1( TIM1, Sin_pwm_tab[ Fase2]);
TIM_SetCompare2( TIM1, Sin_pwm_tab[ Fase1]);
TIM_SetCompare3( TIM1, Sin_pwm_tab[ Fase3]);
Fase1++;
Fase2++;
Fase3++;
if( Fase1== 60) Fase1=0;
if( Fase2== 60) Fase2=0;
if( Fase3== 60) Fase3=0;
>
//Экстренное торможение.
if( work== 2) if( cycle_stop
Код где выполняется настройка TIM1 для управления частотным преобразователем.
//+++Все настройки TIM1.+++
RCC_APB2PeriphClockCmd( RCC_APB2Periph_TIM1, ENABLE);
//Основная настройка.
TIM_TimeBaseInitTypeDef Timer1_init;
Timer1_init.TIM_ClockDivision= TIM_CKD_DIV4;//Предделитель равный четырём для TIM_DeadTime.
Timer1_init.TIM_CounterMode= TIM_CounterMode_Up;//Отсчёт периода вверх TIM1.
Timer1_init.TIM_Prescaler= 1;//Предделитель 2 счётчика TIM1, продолжительность одного такта таймера 1/24000000=0.000 000 041.
Timer1_init.TIM_Period= 8000;//48000000/(8000*2)=3000Гц частота несущей, если частота генерации синусоиды 50Гц то массив синуса состоит из 3000/50=60 элементов.
Timer1_init.TIM_RepetitionCounter= 0;//Прерывание сразу после отсчёта периода таймера.
TIM_TimeBaseInit( TIM1, &Timer1_init);
TIM_ARRPreloadConfig( TIM1, ENABLE);
TIM_OC1PreloadConfig( TIM1, TIM_OCPreload_Enable);
TIM_OC2PreloadConfig( TIM1, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig( TIM1, TIM_OCPreload_Enable);
//Настройка управления выводами при работе и остановке.
TIM_OCInitTypeDef pwm_fase;
pwm_fase.TIM_OCMode= TIM_OCMode_PWM1;//Выводы будут отрабатывать прямой сигнал ШИМ.
pwm_fase.TIM_OCPolarity= TIM_OCPolarity_Low;//Активное состояния выводов низкое прямых выводов.
pwm_fase.TIM_OCNPolarity= TIM_OCNPolarity_Low;//Активное состояния выводов низкое обратных выводов.
pwm_fase.TIM_OutputState= TIM_OutputState_Enable;//Включаем выводы прямой полярности.
pwm_fase.TIM_OutputNState= TIM_OutputNState_Enable;//Включаем выводы обратной полярности.
pwm_fase.TIM_OCIdleState= TIM_OCIdleState_Set;//При остановке TIM1 на прямых выводах будет низкий уровень.
pwm_fase.TIM_OCNIdleState= TIM_OCNIdleState_Reset;//При остановке TIM1 на обратных выводах будет низкий уровень.
pwm_fase.TIM_Pulse= 0;
TIM_OC1Init( TIM1, &pwm_fase);
TIM_OC2Init( TIM1, &pwm_fase);
TIM_OC3Init( TIM1, &pwm_fase);
//Включаем прерывание от окончания отсчёта периода TIM1 и от аварийной ситуации.
NVIC_InitTypeDef i_tim1;
i_tim1.NVIC_IRQChannel= TIM1_BRK_UP_TRG_COM_IRQn;
i_tim1.NVIC_IRQChannelCmd= ENABLE;
i_tim1.NVIC_IRQChannelPriority= 0;
NVIC_Init( &i_tim1);
TIM_ClearFlag( TIM1, TIM_FLAG_Update);
TIM_ITConfig( TIM1, TIM_IT_Update, ENABLE);
TIM_ClearFlag( TIM1, TIM_FLAG_Break);
TIM_ITConfig( TIM1, TIM_IT_Break, ENABLE);
//Настройка мёртвого времени и как должна срабатывать защита от аварийной ситуации.
TIM_BDTRInitTypeDef Protection_pwm;
Protection_pwm.TIM_AutomaticOutput= TIM_AutomaticOutput_Disable;//Разблокировка выводов при срабатывании защиты, установлено программное.
Protection_pwm.TIM_Break= TIM_Break_Enable;//Включен вывод защиты TIM1_BKIN( PB12).
Protection_pwm.TIM_BreakPolarity= TIM_BreakPolarity_Low;//При срабатывании защиты выводы в низком состоянии.
Protection_pwm.TIM_DeadTime= 12;//Значение 12 Dead-time 1 микросекунда, для IR2136( Data Sheet No. PD60166 revU, стр 5 в первой таблице) должно быть не меньше External dead_time>400 ns.
Protection_pwm.TIM_LOCKLevel= TIM_LOCKLevel_OFF;//Защита регистров от случайной перезаписи отключена.
Protection_pwm.TIM_OSSIState= TIM_OSSIState_Enable;//Состояние выводов во время остановки( IDLE) TIM1 включена.
Protection_pwm.TIM_OSSRState= TIM_OSSRState_Enable;//Состояние выводов во время работы TIM1 включена.
TIM_BDTRConfig( TIM1, &Protection_pwm);
>
//Функция запуска генерации ШИМ.
void Start_Pwm_Tim1( void) TIM_CtrlPWMOutputs( TIM1, ENABLE);
TIM_Cmd( TIM1, ENABLE);
>
//Функция остановки, установкой бита генерируем аварийную остановку и вызывается прерывание.
void Stop_Pwm_Tim1( void)< TIM1->EGR|= 0x80;>
Код настройки контроллера для работы с драйвером LCD TM1628 через интерфейс SPI и управления индикацией.
Хроника неудач в процессе разработки частотного преобразователя.
Первый испытательный пуск на двигателе 180 Ватт удачно, аппарат оставлен включенным, через две минуты взрыв выгорели дорожки вокруг диодных мостов. Причина не удачи забыл смыть активный флюс, урон не значительный убило стабилизатор L7805CV всё остальные компоненты живы.

Второй испытательный пуск на двигателе 2.2 кВатт в жёстком режиме сразу 50 герц без плавного пуска и снижения коэффициента мощности, не запускается срабатывает защита по току с одной стороны радует с другой хотелось что бы он покрутился проверить нагрев транзисторов, решил закоротить шунты то есть убрать защиту. Пуск что то затрещало но двигатель не закрутился, выключил сразу включил тут сразу бабах, вывод не фига отключать защиту, итог ниже.

goodspeedmen 2020-01-11 22:57:05
Я вижу проект претерпел серьёзные изменения! stm8 что отпал?
goodspeedmen 2020-01-11 22:59:15
Как на счет модулей типа FSBB30CH60C цена невелика (в Китае) а если стрельнет то все одно все выгорает.
teseiaaw 2020-01-14 00:03:18
stm8 вполне пригодны, но stm32f030 почти та же цена но больше возможностей!
teseiaaw 2020-01-14 00:06:56
FSBB30CH60C к этим модулям нужен радиатор который очень дорого стоит, транзисторы меньше греется.
transcription 2020-04-22 12:51:15
Добрый день! Отличная статья и видео. Можете помочь с поиском инфы или статей чтобы пересчитать на другой двигатель. У меня есть в наличии IR2136, STM32, разные мосфеты (IRF5330N, FPQ85N06, IRFZ44N, BUK7575-100A). Мне нужно управлять двигателем 500 Вт. Рабочее напряжение 60 В. Собираем электромашину для соревнования Shell-Eco marathon.
Асинхронные 3-х фазные движки очень широко применяются не только в промышленных отраслях, но и в других областях. Очень сложно нормально организовать работу современного оборудования без подобных агрегатов. Ведь самая важная составляющая работы механизма — это его плавный пуск и остановка.

Чтобы обеспечить плавный запуск машины и также плавно остановить ее после выполненной работы, изобрели преобразователи частоты — данные устройства довольно эффективны, когда речь идет о крупных электромоторах с высокой мощностью.
Именно при помощи приводов прекрасно выполняют регулировку пусковых токов и возможность контроля за ними, чтобы они не превышали допустимые значения. Чтобы правильно использовать данную аппаратуру, нужно знать, по какому принципу работает преобразователь для асинхронного электродвигателя. С его применением получится продлить срок эксплуатации оборудования и уменьшить потери электричества. Мало того, что управление электронное, так еще и пуск мягкий — все это позволяет обеспечить плавное регулирование работы приводов, а соотношение между напряжением и частотой идеальное.
Что из себя представляют приводы
К их главной функции относится плавная регулировка вращательной скорости асинхронных моторов. Для этой цели на входах устройств создают 3-х фазную силу тока с переменной частотой.
Также можно встретить и другое название — инверторы. В основе их принципа работы лежит выпрямление переменного тока промышленных сетей. Прибегают к использованию выпрямительных диодов, которые объединяют в общий блок. Фильтруют ток конденсаторы, у которых высокая емкость — они призваны снижать до минимальных показателей пульсацию поступающего питания.
Принцип работы инверторов
Для того, чтобы качественно и эффективно управлять асинхронным электромотором, необходимо к нему подсоединить инвертор. В общую конструкцию входит частотно-регулируемый привод, позволяющий значительно улучшать технические показатели механизмов и машин.
Именно ПЧ выступает в качестве одного из управляющих элементов. Его основная функция — это смена частоты для питающей сети. Конструкцию имеет в виде статических электронных узлов, а формирует переменный ток на выходной клемме. Получается, что благодаря изменению амплитуды происходит регулировка скорости вращения двигателя.
Каким образом происходит управление асинхронными моторами:
- Векторным — удержание момента нагрузки в постоянном виде в разных диапазонах регулировок частоты. Становится более точным управление, привод гибко реагирует на смену выходной нагрузки. В итоге вращательный момент двигатель находится под управлением ЧП. Также следует брать в расчет, что момент вращения будет образовываться в зависимости от токов статора. Фаза статорных токов при векторном управлении меняется. Именно она и управляет вращательным моментом.
- По линейному закону работает скалярное управление — частота с амплитудой находятся в пропорциональной зависимости между собой. Переменная частота приведет к смене амплитуды питания, которое поступает и оказывает влияние на коэффициент мощности оборудования, крутящий момент и КПД. Также нужно учесть зависимость выходящей частоты от нагрузочного момента на валах движка. Чтобы добиться равномерного и постоянного момента нагрузки, отношение выходной частоты к амплитуде напряжения должно быть одинаковым. Именно это равновесие и поддерживает частотник.
Способы настройки преобразователей для электродвигателей
Чтобы частотники для асинхронных движков полностью выполняли свои функции, их нужно правильным образом подключать и настраивать. Изначально подключают в сеть, размещая под прибором автоматический переключатель. При этом его номинальная мощность должна быть сопоставима с величиной тока, которую потребляет двигатель. Если эксплуатация ЧП предполагается в 3-х фазной сети, то автомат нужно использовать такой же. И рычаг нужен общий, чтобы в случае короткого замыкания на одной фазе быстро отключались и другие.
Самостоятельное подключение частотников
Прежде чем подключать устройство, лучше применить обесточивающий автомат, который обеспечит отключение всей системы на случай короткого замыкания. Всего есть только два варианта соединения частотников с электродвижками. Либо треугольником — когда нужно управлять однофазными приводами, либо звездой — когда нужно подключить трехфазный инвертор, запитывающий промышленные 3-х фазные сети.
Чтобы ограничить пусковой ток и снизить пусковой момент во время запуска электромотора нужно применять переключение со звезды на треугольник. При пуске питания на статор преобладает подключение звездой. А когда скорость стремится к номинальной, тогда это уже ближе к треугольнику. Это возможно в том случае, если позволят технические возможности подключения по двум схемам.

У тока срабатывания должны быть характеристики, которые полностью соответствуют токам отдельных фаз электродвигателя. Если ЧП будут применять в однофазных сетях, то лучше использовать одинарные автоматы, но их номинал должен быть трижды выше тока одной фазы. От количества фаз не зависит во время установки частотника, включаются в нулевой провод или в заземляющий разрыв. Желательно прибегать к прямому подключению.
Как сконструировать частотный привод своими руками
При разработке привода следует делать упор на то, чтобы конструкция была эффективной и стоила немного. Также необходима защита и и гибкость. В итоге выйдет инвертор, у которого следующие функции:
- намагничивания двигателя;
- полной остановки мотора;
- скорости набора частоты от 5 до 50 Гц за секунду;
- максимальной мощности с модулем 750 Вт;
- выходной частоты от 5 до 200 Гц;
- входа реверса;
- возможности менять характеристику У/Ф;
- контроля напряжения ДС звена;
- вольт добавки от 0 до 20 %.
Когда подается питание, то происходит заряд емкости ДС звена. Когда оно достигнет 220 В, произойдет определенная задержка и включится реле предзаряда, загорится единственный светодиод. Можно считать, что привод полностью готов к работе. Чтобы управлять частотником, в наличии шесть входов.

По какому алгоритму работает устройство
С самого начала микроконтроллер настроен на работу с электродвигателем с номинальной мощностью 220 В, а частота вращения поля 50 Гц — речь идет об обычном частотнике. Набирается частота со скоростью где-то на уровне 15 Гц за секунду. Вольт добавку устанавливают на уровне 10 % с длительностью намагничивания 1 секунду. Эта величина является неизменной.
Продолжительность торможения постоянными токами 1 секунда. Не стоит забывать, что величина электричества в момент намагничивания и торможения изменяется в одно время. Частотные преобразователи скалярные. Когда растет выходная скорость, то растет и выходной ток.
Если в момент вращения движка изменить задание на резисторе, то оно сможет измениться только когда команда будет дана повторно. Грубо говоря, данные с резистора будут читаться при отсутствии этих двух сигналов. Если планируется регулировка скорости при помощи резистора в момент работы, то нужно будет устанавливать джампер.
Особенности настроек и регулирования
Прежде чем в первый раз включить привод, необходимо его настроить и проверить, правильно ли смонтированы все электронные компоненты и настроен делитель напряжения для ДС звена. Если на 100 вольт звена 1 вольт на 23, то можно считать настройку завершенной. Плата перед подачей тока промывается и удаляются остатки канифоли со стороны пайки при помощи спирта или растворителя, покрывается лаком плата.
У привода присутствуют заводские настройки — они подойдут как для движка с напряжением 220В, так и для движка с током 380В. Чтобы выставить заводские настройки для движка 220 в и частотой 50 Гц следует выполнить следующие действия:
- Привод включается.
- Ожидается готовность.
- Нажимается и удерживается кнопка В1, пока светодиод не замигает, тогда кнопку можно отпускать.
- Подается команда выбора скорости. Когда светодиод уже не мигает, команда убирается.
- Можно считать привод настроенным.
Во время этих настроек в автоматическом режиме записываются параметры номинальной частоты движка, интенсивность разгона, вольт добавки, интенсивность торможения. Получается, что пока светодиоды мигают, то привод настраивается.

Что касается питания
Лучше всего воспользоваться трансформатором, потому что он надежнее всех остальных вариантов. Обязательна установка защитного диода. Какие движки можно подключать к самодельным преобразователям частоты? В данном случае большое значение имеет модуль. Следует учитывать, что некоторые модули рассчитаны на небольшие импульсные токи и имеют встроенную защиту на уровне 15 А. А это крайне мало. Если речь идет о двигателе в 50 Гц, то этого вполне достаточно. Когда вы располагаете высокооборотистым шпинделем, то зачастую у них небольшое сопротивление обмотки. Данные модули можно будет пробить импульсными токами.
Предназначение частотно регулируемых приводов
С того момента как появились инверторы ничто не обходится без их использования. Самый значительный момент при работе — это плавное торможение и плавный пуск. И чтобы это требование выполнить, необходимо прибегать к помощи частотников. Названий у них много, но функционал один. При помощи инверторов происходит регулировка вращательной скорости асинхронного движка, который предназначен для преобразования электроэнергии в механическую.
Благодаря специально разработанной схеме частотников получается довести коэффициент полезного действия движка до уровня 99%. Чем больше мощность движка, тем нужнее ему инвертор, который осуществляет смену пусковых токов и задает нужную для них силу.
Когда используешь ручное управление пусковых токов, то это может закончиться чрезмерными энергозатратами и в результате это снизит срок эксплуатации электромотора. Когда нет инвертора, то превысится номинальное значение напряжения в разы. Именно работа в таком отрицательном режиме оказывает отрицательное влияние.
Именно приводы призваны обеспечить плавное управление работой движка. Ориентироваться нужно на сбалансированные значения частоты и напряжения, в результате в два раза снизится потребление энергии. Именно частотник обеспечивает все эти положительные моменты.
По какому принципу действуют приводы:
- продуцируют прямоугольные импульсы и затем корректируют амплитуду с помощью обмотки статора;
- электронное управление, формирующее определенную частоту, которая соответствует предварительно обозначенному режиму и трехфазному напряжению;
- регулировка сетевого тока посредством выпрямления и фильтрования в звене прямого тока.
Перед тем как решиться на покупку привода, нужно понимать, что это недешевое приобретение. Либо он будет малофункциональным и как следствие бесполезным. Тип управления частотника тоже отличается: либо скалярный, либо векторный. Рабочие режимы ограничиваются заданными выходными соотношениями напряжения и частоты. Мощность частотника тоже крайне важна. Чтобы снизить вероятность поломки при возможных резких скачках напряжения, лучше воспользоваться питающей сетью с широким диапазоном питания. Если оно превысит максимально допустимые значения, то конденсаторы просто взорвутся.
Читайте также: