
Как сделать торможение асинхронного двигателя
Обновлено: 07.07.2024
При рекуперативном торможении происходит отдача энергии в сеть, электрическая машина работает как генератор (преобразует механическую энергию в электрическую). Этот способ отличается высокой экономичностью.
Торможение противовключением имеет место в случае, когда двигатель под воздействием сил, действующих со стороны рабочего механизма, вращается в направлении, противоположном тому, и которое включены его обмотки.
При динамическом торможении Получают этот режим при отключении якоря от сети и последующим замыканием его на внешнее сопротивление.Двигатель становится автономным генератором. При динамическом торможении запасенная в электроприводе кинетическая энергия преобразуется в электрическую.
Динамическое торможение подъемных машин
На подъемных установках шахт для получения пониженных скоростей при спуске людей и грузов и для оперативных замедлений при отрицательных усилиях применяют динамическое торможение асинхронных подъемных двигателей. Сущность динамического торможения заключается в том, что в период замедления или при спуске груза асинхронный подъемный двигатель отключается от сети переменного тока.
Р отор его, замкнутый накоротко или на сопротивление, вращается под действием внешней силы а в обмотку статора включен постоянный ток.
Протекая по обмоткам статора, постоянный ток создает неподвижное в пространстве магнитное поле, наведящее во вращающейся замкнутой обмотке ротора переменный ток. Взаимодействие переменного тока вращающегося ротора с неподвижным магнитным полем статора создает тормозной момент.
Регулирование развиваемого подъемным двигателем тормозного момента при динамическом торможении осуществляется изменением сопротивления в цепи ротора или изменением тока возбуждения статора двигателя. Полностью остановить двигатель с помощью динамического торможения нельзя, так как при уменьшении скорости вращения уменьшается и тормозной момент, развиваемый двигателем.
Все механические характеристики асинхронного двигателя, работающего в режиме динамического торможения и управляемого с помощью металлических сопротивлений, могут быть рабочими при различных скоростях вращения ротора и постоянном моменте для всех ступеней сопротивления.
Длительной эксплуатацией, а также специальными исследованиями установлено, что динамическое торможение подъемных машин превосходит по высоким технико-экономическим показателям все остальные виды электрического и механического торможения:
- возможность регулирования скорости в больших пределах, что исключает применение механического тормоза для создания пониженных скоростей или рабочих замедлений; механический тормоз используют только для окончательного стопорения машины и аварийной остановки.
- плавное, без рывков изменение скорости, что значительно сокращает износ подъемных канатов, редуктора и подшипников;
- Простота в управлении подъемной машиной (машинист управляет одной рукояткой механического тормоза);
- Благодаря созданию плавных, но интенсивных замедлений и простоте управления продолжительность подъемного цикла сокращается, а производительность подъемной установки повышается.
- применение динамического торможения не вызывает опасных или вредных режимов работы подъемного двигателя.
К недостаткам характеристик динамического торможения относится их мягкость при работе двигателя с большим сопротивлением в цепи ротора, когда малое изменение внешнего момента вызывает значительное изменение скорости вращения двигателя.
Если нужно уменьшить диапазон времени свободного пробега или же зафиксировать компонент в каком – то определенном положении, то тогда необходимо обеспечить торможение или замедление электродвигателей.
Есть три вида остановить подачу электроэнергии: механический, электрический и комбинированный. Механический способ – это аппарат, который в виде тормозного шкива с колодками, что крепится на вал. Процесс торможения происходит за счет того, что при выключении механизма, колодки присоединяются к шкиву.
Если нужно обеспечить скоростное выключение или же, наоборот, установить постоянное вращение электродвигателя, то тогда нужно использовать электрические способы.
В связи с этим, режимы торможения делятся на рекуперативные, динамические и против включения.

Для того что бы достаточно быстро отключить компонент, используют именно режим против включения, который обеспечивает переключение двух фаз или же меняет полярность при обмотке электродвигателя постоянного тока.
В результате этого, происходит обратное вращение, которое приводит к торможению ротора. Он начинает замедляться и, когда скорость равна нулю, компонент просто выключается.
Что бы избежать после этого увеличения напряжения, необходимо установить дополнительные резисторы, которые устранят эту проблему и ограничат поток тока.
Способ динамической остановки электродвигателя чаще всего используют для торможения переменного потока тока в асинхронных машинах. Этот способ способствует направлению постоянного тока в стартерную обмотку.
Мощность постоянного тока направляется к статору электродвигателя через понижающий трансформатор для динамической остановки. Более того, для остановки электрического мотора, можно установить дополнительные источники постоянного тока.
Постоянное направление тока к источнику способствует неподвижному магнитному потоку. В результате этого электродвигатель, так сказать, превращается в генератор. При этом, работа и напряжение компонента выключается по сигналу реле скорости.

Динамическое торможение можно, так же, сделать с помощью подсоединения конденсаторов, которые объединяются звездой или треугольником. Такой способ используется электродвигателей с самовольным возбуждением.
На исходе электроэнергия из магнитного поля проходит в конденсаторный заряд и обеспечивает обмотку статора.
Компонент при этом отключается, но, при этом, аккумулятор конденсатора электродвигателя может быть постоянно подключена или присоединяться, когда отключается питание.
Есть еще один вариант быстрого отключения от сети, это замыкание контактов без гасящих резисторов. Что бы уменьшить подачу тока, то подсоединяют резисторы, которые исключают подачу тока.
Динамическая остановка электродвигателя с постоянным током происходит только после полного отключения его от питания с замыканием обмотки. В результате этого, энергия, которая осталась – рассеивается.
При рекуперативной остановки, электродвигатель переходит в режим генератора. При этом, электрическую энергию не блокируют, а используют для дополнительной зарядки или она просто возвращается в сеть.
Данный способ торможения характерен больше всего для трамваев, троллейбусов. Более того, очень часто его используют для заряда электроавтомобилей, электросамокатов и электровелосипедов.

Этот режим более всего удобен если обороты холостого года меньше, чем обороты ротора и, более того, если якорный ток и магнитный поток изменяют свое направление.
Механизм, так же как и при других способах, переходит в режим генератора и происходит остановка. Что не мало важно, это очень дешевый способ торможения.
Использование рекуперативного способа для асинхронных компонентов возможно при таких особенностях:
- При использовании частотного преобразователя поменять частоту питающей мощности. В результате чего, происходит остановка механизма в последствии снижения частоты мощности. Компонент переходит в режим генератора, если скорость оборота ротора становится больше чем номинальная.
- Если есть вероятность изменить скорость с помощью переключения обмотки.
- В машинах, которые поднимают грузы и имеют силовой спуск. В таких механизмах уже встроенный электрический мотор, который имеет ротор с фазами.
Что касается комбинированного способа, то его тоже используют, если нужно очень бегло сделать остановку компонента и зафиксировать его.
В этом случае используется или механический и электрический способ, или динамический и рекуперативный, или же другие варианты комбинаций для получения максимального эффекта.

После отключения от сети электродвигатель продолжает движение по инерции. При всем этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Потому скорость электродвигателя через просвет времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции именуется свободным выбегом . Многие электродвигатели, работающие в длительном режиме либо со значительными нагрузками, останавливают методом свободного выбега.
В тех же случаях, когда длительность свободного выбега значительна и влияет на производительность электродвигателя (работа с частыми запусками), для сокращения времени остановки используют искусственный способ преобразования кинетической энергии, запасенной в передвигающейся системе, именуемый торможением .
Все методы торможения электродвигателей можно поделить на два главных вида: механическое и электронное.

При механическом торможении кинетическая энергия преобразуется в термическую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электронном торможении кинетическая энергия преобразуется в электронную и зависимо от метода торможения мотора или отдается в сеть, или преобразуется в термическую энергию, идущую на нагрев обмоток мотора и реостатов.
Более совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя малозначительны
Схемы динамического торможения асинхронных движков
Для управления моментом при динамическом торможении асинхронным движком с фазным ротором по программке с заданием времени употребляются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети неизменного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе употребляются пусковые резисторы R1, включение которых в режиме динамического торможения делается отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде 1-го контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.

Рис. 1 Схемы управления динамическим торможением асинхронных движков с фазным ротором с заданием времени при наличии и отсутствии сети неизменного тока
Эквивалентное значение неизменного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б подходящим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть избран как на неизменном, так и на переменном токе зависимо от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут употребляться для управления режимом динамического торможения асинхронного мотора с короткозамкнутым ротором. Для этого обычно употребляется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных движков
При управлении моментом при торможении противовключением асинхронного мотора с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения употребляется реле контроля скорости SR, укрепляемое на движке. Реле настраивается на напряжение отпадания, соответственное скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема употребляется для остановки мотора с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR употребляется для отключения контакторов КМ2 либо КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости мотора, близкой к нулю. При реверсировании мотора команды SR не употребляются.

Рис. 2 Узлы схемы управления торможения противовключением асинхронного мотора с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным движком с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, к примеру, реле напряжения неизменного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Нередко для опции реле KV употребляется дополнительный резистор R3. Схема в главном используется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может употребляться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске мотора реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сходу после подачи управляющей команды на запуск.

Рис. 3. Узлы схем управления торможением противовключением асинхронных движков с фазным ротором с контролем скорости при реверсе и остановке
В режиме противовключения после подачи команды на реверс (рис. 3, а) либо остановку (рис. 3, б) скольжение электродвигателя увеличивается и происходит включение реле KV.
Реле KV отключает контакторы КМ4 и КМ5 и тем вводит полное сопротивление Rl + R 2 ротор мотора.
В конце процесса торможения при скорости асинхронного мотора, близкой к нулю и составляющей приблизительно 10 — 20 % установившейся исходной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 при помощи контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме либо команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных движков
При остановке асинхронных движков, также для удержания механизма передвижения либо подъема, к примеру в крановых промышленных установках, в недвижном состоянии при отключенном движке применяется механическое торможение. Оно обеспечивается электрическими колодочными либо другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB врубается и отключается совместно с движком (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если необходимо отключать тормоз не сразу с движком, а с некой задержкой по времени, к примеру после окончания электронного торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при выключении линейного контактора КМ1 (рис. 4, в).

Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных движков
В асинхронных электроприводах используются также электрические тормоза неизменного тока при управлении электродвигателем от сети неизменного тока.
Схемы конденсаторного торможения асинхронных движков
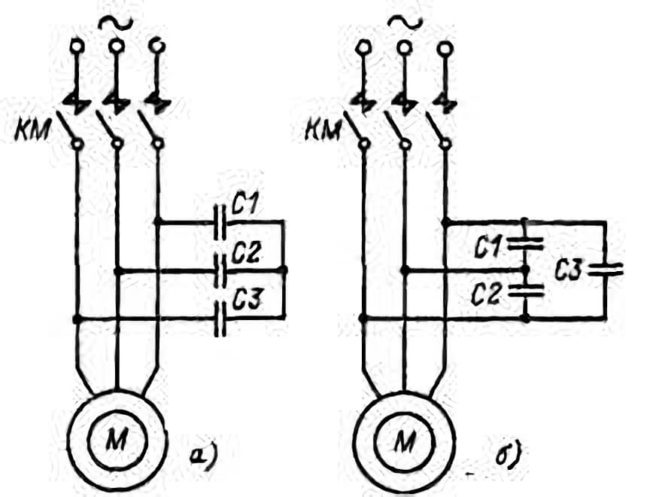
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, присоединенными к обмотке статора. Врубаются конденсаторы по схеме звезды (рис. 5, а) либо треугольника (рис. 5, б).

Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных движков
Работа асинхронного двигателя заключается не только в пуске, установившемся вращении и реверсе, но также и в торможении. При отключении двигателя в том числе и асинхронного от сети его ротор обладая инерцией еще некоторое время продолжает вращаться, или на валу двигателя имеется нагрузка, которая будит принудительно вращать ротор, для предотвращения этого применяется торможение.
Давайте рассмотрим один из двух видов торможения асинхронного двигателя. Электрическое торможение. Электрическое торможение асинхронного двигателя возможно осуществить следующими способами: перевод асинхронной машины в генераторный режим, изменение вращения магнитного поля статора и подача на обмотки статора асинхронной машины постоянного тока.
Перевод в режим генератора
Данный способ осуществим только в том случаи, если ротор двигателя вращается со скоростью большей чем магнитное поле статора. Это возможно при изменении количества пар полюсов на большее, чем было до торможения. Стоит отметить, как только скорость ротора станет ниже синхронной, машина автоматически перейдет в режим двигателя. Также не маловажным является тот факт, что при таком способе невозможно полностью остановить вращение ротора двигателя, а лишь притормозить его до определенного значения.

При таком режиме торможения, асинхронная машина не потребляет из сети электрическую энергию, а наоборот вырабатывает и отдает сеть. При переводе асинхронного двигателя в генераторный режим в целях торможения, можно отключить статорные обмотки асинхронной машины и подключить к ним резистор, при этом чем выше сопротивление резистора, тем больше тормозной момент.
Изменение магнитного поля статора
Этот способ можно назвать не полным реверсом. Также данный способ называют электромагнитным торможением или же торможением путем противовключения, так как в момент работы асинхронного двигателя, поменяв местами две фазы, тем самым изменив направление вращения магнитного поля статора двигателя, последний начинает затормаживать ротор машины, до полной остановки. Крайне важным является, то, что в момент остановки, или при скорости вращения вала близкой нулю, необходимо отключить подачу питания на статор двигателя, иначе, он начнет свое вращение в обратном направлении. Также у асинхронных двигателей с фазным ротором, для увеличения тормозного момента, а также ограничения возникающих в это время токов, в цепь фазного ротора включают реостат. Данный способ отлично подходит для регулировки скорости опускания грузов, когда момент груза, который действует на вал асинхронного двигателя больше момента магнитного поля статора.
Торможение постоянным током
Данный способ торможения асинхронного двигателя является более распространенным и эффективным чем первый способ

перевода в режим генератора. Его суть заключается в том, что на обмотки статора асинхронного двигателя подают постоянное напряжение. При этом обмотки статора двигателя соединяются следующим образом. Когда по обмоткам статора начинает протекать постоянный ток, вокруг статора образуется постоянное не подвижное магнитное поле, которое пересекая вращающуюся обмотку ротора вмести с самим ротором наводит в нем эдс, а в следствии замкнутости этой обмотки по ней протекает ток, создающий магнитное поле ротора. Тормозной момент образуется в результате взаимодействия этих полей.

При таком торможении асинхронного двигателя, тормозной момент достигает больших значений при высокой скорости вращения ротора двигателя, но с уменьшением этой скорости падает и тормозной момент. Тормозной момент также можно регулировать, изменяя значение подаваемого значения постоянного тока на статор или же изменением сопротивления в цепи ротора. Торможение асинхронного двигателя постоянным током также называется — динамическим торможением.
Читайте также: