
Как сделать робота жука
Добавил пользователь Валентин П. Обновлено: 04.10.2024
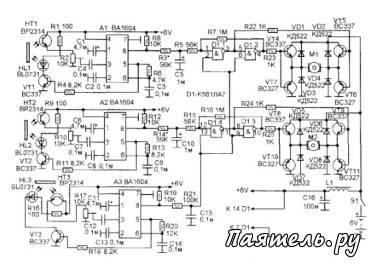
Схема робота-жука на жесткой логике показана на рисунке 1. В отличие от микроконтроллерного оригинала в ней дополнительный третий датчик, который, при использовании микросхемы К561ЛА7, заставляет жука послушно останавливаться и замирать, если вы занесли над ним руку (или мухобойку). В этом исполнении третий датчик направлен вертикально вверх.
Конструкция и схема оптических датчиков такая же, как в микроконтроллерном оригинале. Но датчики сделаны на других микросхемах - ВА1604 (почти полные аналоги LM567).
Данные микросхемы представляют собой однотональные декодеры, состоящие из задающего генератора, усилителя, фазового детектора и выходного ключа. Тот факт, что частота задающего генератора должна быть равна частоте селекции, позволяет задающий генератор использовать как генератор импульсов для инфракрасного светодиода.
Все датчики сделаны по одинаковым схемам. Импульсы с выхода задающего генератора (вывод 5 ВА1604) поступают на транзисторный ключ, в коллекторной цепи которого есть ИК-светодиод. Отраженный от препятствия пульсирующий ИК-свет попадает на фототранзистор, а с его эмиттера фототок поступает на вход тонального (частотного) декодера (вывод 3 ВА1604). Если частоты совпадают на выводе 8 ВА1604 - ноль. При несовпадении частоты или при отсутствии отражения - единица.
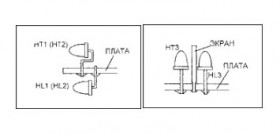
Рис.2 и 3
При монтаже важно сделать так, чтобы ИК-свет от светодиода не мог напрямую попасть на фототранзистор. Проще всего это сделать, расположив светодиод и фототранзистор по разные стороны платы (рис. 2). Датчики на А1 и А2 одинаковы, а датчик на A3 отличается тем. что светодиод и фототранзистор расположены вертикально перпендикулярно плате (рис. 3).
Здесь, чтобы исключить прямое попадание света от HL3 на НТ3 используется светонепроницаемый экран, который можно сделать, например, из латуни. Экран крепится пайкой в двух ни с чем не связанных отверстиях платы. В варианте жука на микросхеме К561ЛЕ5 HL3 и НТ3 располагаются под платой (со стороны печатных проводников), немного наклонно вперед.
Основные датчики (на А1 и А2) расположены на плате так, что направлены вперед по движению жука и немного в стороны. Расположенный слева датчик управляет правым мотором, а расположенный справа, - левым.
В отсутствие препятствия на выходах А1 и А2 единицы, и оба мотора вращаются так, что жук едет вперед. Появление препятствия перед датчиком вызывает смену полярности питания мотора (смену направления вращения). Например, при встрече препятствия впереди слева, правый мотор станет тянуть жука назад, а левый будет продолжать двигать его вперед.
В результате жук будет поворачивать вправо до тех пор, пока препятствие слева не выйдет из поля зрения левого датчика. Затем, прямолинейное движение возобновится. Аналогично при появлении препятствия справа, но поворот будет влево.
Встретив препятствие, расположенное перпендикулярно, перед обоими датчиками, жук начнет пятиться, а затем снова возвращаться к препятствию. Благодаря неточности движущего механизма, имеющемуся в схеме гистерезису, различию в чувствительности датчиков и неидеальной ровности поверхности, по которой робот движется, эти движения будут не строго повторяющимися, и через несколько попыток робот повернет в ту или другую сторону.
Логическое устройство выполнено на D1. На микросхеме сделаны два блокируемых триггера Шмитта, с противофазными выходами. Цепи R3-C5 и R14-C10 нужны для создания небольшой задержки срабатывания схемы. Совместно с триггерами Шмитта они дают некоторый временной гистерезис переключения направления вращения моторов. Это исключает зацикливание робота на пороговом значении расстояния до препятствия.
Как уже говорилось, третий датчик, в схеме с К561ЛА7. направлен вверх. Когда над ним ничего нет на выходе A3 единица. Это не мешает работе триггеров Шмитта. При появлении над датчиком на достаточном расстоянии некоторой поверхности, от неё происходит отражение ИК-луча, и на выходе A3 возникает ноль.
Этот ноль поступает на входы всех элементов микросхемы К561ЛА7 и переводит их в единичное состояние Открываются транзисторные ключи, подающие на двигатели только один полюс питания и ток через них не возникает. Двигатели выключаются.

Сделать робота-жука своими руками, не сложно и очень увлекательно.
-
2 моторчика на 3 вольта.

Шаг 1. Режем эл. провод на куски по 6 сантиметров, снимаем изоляцию с обоих концов по 1 сантиметру.

Шаг 2. Припаиваем провода к моторчикам и переключателям.

Шаг 3. Припаиваем провод к держателю для батареек.

Шаг 4. Переворачиваем бат. держатель и приклеиваем переключатели в форме буквы V.

Шаг 5. Прикрепляем моторчики так, чтобы валы моторчиков касались земли. Можно приклеить клеем.



Шаг 6. Из колесика и большой скрепки делаем стабилизатор, приклеиваем к бат. держателю.

Шаг 7. Схема соединения.
Спаиваем по схеме.


Шаг 8. Из двух маленьких скрепок делаем усы для жука.

Шаг 9. Прикрепляем усы к переключателям, аккуратно с помощью клея.

Шаг 10. На валы моторчиков надеваем изоляцию, для лучшего сцепления.

Шаг 11. Готово, вставляем батарейки.

Можно запускать робота-жука, все дело в том, что когда жук упирается усом в препятствие моторчик выключается и жук объезжает препятствие.


Относительно простое устройство, которое представляет собой мобильную платформу с датчиками препятствий в виде концевых выключателей. Устройство объезжает препятствия, включается/выключается по хлопку, имеет регулировки скорости и времени объезда. Все, включая драйвер, выполнено на дискретных логических элементах.
Устройство разработано для изучения различных схемотехнических решений, а также может быть использовано для тренировки навыков пайки, так как включает в себя много разных типов корпусов радиоэлементов.
Робот-жук. Общий вид
Сборочный чертеж
Все компоненты размещены на двухсторонней плате размером 170х80мм. Ее вполне можно изготовить в домашних условиях и весь верхний слой проводников выполнить перемычками. Все выводные компоненты размещены на лицевой стороне печатной платы.

Печатная плата с лицевой стороны
На обратной стороне расположены SMD-компоненты драйвера, ШИМ-генератора и хлопкового выключателя.

Печатная плата с обратной стороны
К собранной плате винтами крепится скоба-держатель двигателей. Микропереключатели устанавливаются в передней части жука на пластиковых стяжках.
Итоги
После эксплуатации возникли сомнения по поводу целевой аудитории этого робота. На коробке указано, что игрушка для детей от трех лет, но я сомневаюсь, что маленький ребенок оценит и не сломает сразу маленького кибер-жука. Для взрослых людей он особого интереса не вызовет, в силу скудности своих функций. Но все же, кибер-насекомое очень забавное и вызывает желание поиграть. Если вам надоело устраивать гонки на машинках с радиоуправлением, то можно попробовать забеги жуков, думаю будет забавно.
Перечень элементов
Можно скачать отдельным документом по ссылке в конце статьи.
Вот так выглядит полный набор компонентов на это устройство:

Робот-жук. Набор компонентов
Принципиальная схема
Картинка кликабельна, а в конце статьи можно найти ссылку для скачивания в формате pdf.

Принципиальная схема
Обратите внимание, что все блоки устройства скомпонованы по блокам. Это позволяет им работать автономно и наглядно видеть функциональность кусков схемы. Дополнительные комментарии по работе схемы вы найдете в инструкции по сборке устройства.











В завершение



Инструкция по сборке
С одной стороны можно собрать все устройство целиком и рассчитывать, что оно будет нормально функционировать. Мы рекомендуем запускать блоки изделия по частям, но даже если вы не собираетесь собирать устройство в предложенной последовательности, все равно изучите этот раздел
- Установите клемму XS5 и резистор R65. Для проверки всех блоков на клемму XS5 подается питающее напряжение 7В с соблюдением полярности, указанной на плате
- Собрать и проверить блок “Clock Source”. При включении питания светодиод HL1 должен мигать с частотой, зависящей от установки R2
- Собрать и проверить блок “Clap Switch” (микрофон BM1 также входит в его состав). Под воздействием громкого звука (хлопок, щелчок пальцами) светодиод HL13 должен изменять свое состояние
- Собрать блок “PWM” и проверить блок “PWM”. При его правильной работе, яркость свечения светодиода HL2 должна задаваться сопротивлением резистора R8
- Собрать и проверить блок “Trigger”. Микропереключатели-датчики следует подключить, но не закреплять на плате. Подключение производится монтажным проводом к клеммам XS1, XS2. При замыкании микропереключателей светодиод HL4 должен включаться и выключаться
- Собрать и проверить блоки “Left Driver” и “Right Driver”. Для проверки потребуется установить перемычки на разъемы XP1-XP3. XP1 и XP2 позволяют подать на разрешающий вход драйвера ШМ-сигнал или логическую единицу. XP3 находится в блоке “Clap Switch” и подает питание на драйвер через выключатель или напрямую. Имитировать входные сигналы можно при помощи переключателей SA1 и SA2. Оба переключателя разделены на две условные группы. В каждой группе три сигнала: VCC, SIG и GND. Возможные варианты положения переключателей показаны на рисунке. а) – не корректно (на вход драйвера не подано ничего), б) – не корректно (подано одновременно два сигнала), в) – не корректно (два нуля – запрещенное состояние), г) – корректно (двигатель вращается), д) – корректно (на вход поданы логические сигналы схемы)
Робот-жук с обратной стороны.
Настройка
Для нормальной работы все клавишные переключатели должны находиться в положении SIGNAL. На разъем XP3 надо установить в положение SWITCH, чтобы работало управление питанием драйвера через хлопковый выключатель. Если он не функционирует, то можно установить переключатель в положение V_BAT. Тогда драйвер будет всегда активен. Джамперы XP1, XP2 отвечают за управление скоростью движения двигателей. В положении PWM будет возможность регулировать ШИМ резистором R8. Если установить джампер в положение Enable, двигатели будут всегда работать на максимальной скорости. Резистором R2 можно регулировать длительности остановок и движения при объезде препятствий.
Структурная схема
В начальном состоянии жук всегда едет вперед. Это задается сочетаем сигналов двигателей. Если срабатывает один из датчиков, то блок триггеров (TRIGGER) разрешает работу тактового генератора (CLOCK SOURCE) и счетчика, который входит в блок DIRECTION SELECTOR. Во время счета жук выполняет последовательность действий для объезда препятствия. Сначала он останавливается, затем делает паузу, отъезжает назад, делает паузу, поворачивает налево или направо, снова делает паузу и возобновляет движение. На пятый такт работы происходит сброс триггера.
В зависимости от сработавшего датчика жук поворачивает налево или направо. Блок выбора направления движения формирует четыре сигнала управления двигателями – по два на каждый драйвер. Сочетания логических уровней этих сигналов позволяет вращать двигатель вперед или назад, либо остановить двигатель. Поворачивает жук за счет того, что колеса вращаются в противоположные стороны.
Питание всей схемы осуществляется от двух LiIon-аккумуляторов типоразмера 18650, включенных последовательно, либо внешнего источника питания с напряжением 7-9В. Питание на драйверы двигателей подается через “хлопковый выключатель” (CLAP SWITCH). Это позволяет остановить или возобновить движение хлопком в ладоши.
Для регулировки скорости движения жука используется регулируемый генератор ШИМ-сигнала (PWM).

Структурная схема и сигналы










Прототип:

Прежде чем приступить к сборке робота, проверим работоспособность железа и программы. Загрузите скетч в микроконтроллер, измените в программе коды в соответствии с таблицей, которую вы составили. Нажимайте на управляющие кнопки пульта, проверьте реагируют ли серводвигатели, все ли работает. Проверьте работоспособность модели не только с питанием по USB, но и с питанием от аккумулятора.
Как подключить ИК-приемник к Arduino
В проекте используется ИК-приемник и ИК-передатчик (это может быть пульт от вашего телевизора).
Давайте научимся получить команды с ИК-пульта дистанционного управления. Нужно считать и запомнить код сигнала, чтобы позже использовать его для управления роботом. Возьмите Arduino Uno, бредбоард, соединительные провода и ИК-приемник. Соберите схему как на фотографии.

Подключение ИК-приемника к Arduino UNO

Схема подключения ИК-приемника к Arduino UNO
Теперь кода с GitHub. Откройте Arduino IDE и проект /ir_receiver/ir_receiver.ino. Первая строка кода:
Это означает, что скетч использует специальную библиотеку IRremote.h, в которой реализован функционал приема и отправки ИК-сигналов.
Наш робот может выполнять 13 команд:
Теперь нажимайте соответствующую кнопку и записывайте соответствующие уникальные коды.


Относительно простое устройство, которое представляет собой мобильную платформу с датчиками препятствий в виде концевых выключателей. Устройство объезжает препятствия, включается/выключается по хлопку, имеет регулировки скорости и времени объезда. Все, включая драйвер, выполнено на дискретных логических элементах.
Устройство разработано для изучения различных схемотехнических решений, а также может быть использовано для тренировки навыков пайки, так как включает в себя много разных типов корпусов радиоэлементов.
Робот-жук. Общий вид
Простейший робот-жук
Идея конструкции не нова, здесь просто собраны вместе как сама идея, так и ее реализация из простых и доступных материалов.
Эта игрушка движется вперед при помощи двух моторов. Как только один из ее усов касается препятствия, мотор со стороны этого уса начинает вращаться в обратную сторону и жук поворачивает до тех пор, пока не объедет препятствие. Конструкция наглядно показывает принцип действия контактных датчиков.
На видео показано как все происходит
В конструкции применены две батарейки AA, два мотора от детских игрушек, два контактных датчика.
Для начала сделаем эскиз расположения элементов робота на его корпусе. После чего нарисуем контур самого корпуса (шаблон) и распечатаем все это на листе бумаги.
Теперь можно приступать у сборке.
Вот основные детали, которые нам потребуются
Кроме того я использовал термоусадочную трубку большого (22 мм) и малого (5 мм) диаметра и крепежные винты с гайками M2.5.
Берем лист с шаблоном корпуса
накладываем шаблон на банку и определяем какой ширины полосу жести от банки надо отрезать
что потом и делаем.
ВНИМАНИЕ! Работа с жестью опасна тем, что можно легко порезаться об острые зазубренные края в месте среза. Будьте осторожны!
Далее накладываем шаблон на вырезанную жесть и вырезаем по шаблону заготовку корпуса.
и сверлим отверстие для оси этого колеса
далее сверлим отверстия для крепления батарейного отсека (кстати в жести отверстия можно просто прокалывать шилом)
Крепим контейнер винтами и вставляем колесо
теперь размечаем отверстия для крепления датчиков
Теперь пайка. Припаиваем проводники к моторам.
рекомендуем использовать разноцветные проводники и припаивать проводники одинакового цвета к одинаково расположенным выводам деталей, что облегчит окончательное подключение всего.
Так как на нашей схеме между батареями включен средний провод, подсоединяем его к контейнеру, продевая провод через отверстие контейнера со стороны, обратной той, из которой выходят плюсовой и минусовой провода и прикручиваем зачищенную часть нового проводника к пружинке, соединяющей выводы батареек.
припаиваем проводники к датчикам
Крепим моторы к корпусу. Для этого нам потребуются два отрезка толстой термоусадочной трубки длиной примерно 1 см.
кладем мотор сверху на выступ корпуса, надеваем на мотор и выступ колечко термоусадки и нагреваем все это (строительным феном, зажигалкой или кожухом вокруг жала паяльника)
после крепления обоих моторов берем тонкую термоусадочную трубку, надеваем на вал моторчика и усаживаем. Это нужно для того чтобы вал моторчика не царапал поверхность, по которой будет ездить и для увеличения скорости жука. Мы эту трубку надевали в два слоя для более высокой скорости.
лишний кусок трубки отрезаем кусачками
и теперь изолируем термоусадкой все наши электрические соединения.
а сами усы сделаем из электромонтажного одножильного провода сечением 1,5 кв. мм
и обжимаем усы в гнезде клемм
после чего сами клеммы насаживаем на чувствительную пластину датчиков и плотно прижимаем плоскогубцами
вот так устрашающе выглядят эти усы в собранном виде. моторы надо отогнуть вниз так, чтобы жук опирался на их оси как на ноги. Чем больше угол, на который вы их отгибаете, тем меньше скорость будет у Вашего жука
и вот, собственно наш жук в готовом виде
Что еще можно с нашим жуком сделать:
Все это мы и будем делать на занятиях по началам робототехники в нашем клубе этой осенью.
Вначале кусачками, острым ножом или ножовкой отрезаем головку зубной щётки.
Обратите внимание на наклон щетинок щётки, представленной на фотографии. Если вы используете зубную щётку с прямыми щетинками, то вам нужно будет предварительно придать некоторый наклон щетинкам. Это можно сделать с помощью обыкновенного кипятка.
Далее припаиваем две проволоки к контактам вибромотора. Если теперь подсоединить мотор к батарее, он будет вибрировать благодаря быстрому вращению эксцентрика (груз со смещённым центром тяжести), закреплённого на оси.
Вибромотор приклеиваем с помощью двухстороннего скотча к основанию головки зубной щётки таким образом, чтобы ничто не мешало вращению эксцентрика на оси мотора. Следом за ним устанавливаем батарейку от часов.
Плата-аналог Arduino DFRobot Beetle (жук)

Аналог Arduino — плата DFRobot Beetle

Слева направо: Arduino-совместимые платы DFRobot Leonardo, Nano, Nova, Beetle
Спецификация платы DFRobot Beetle:

Плата DFRobot Beetle (аналог Arduino) на плате расширения
Схема пинов на плате расширения:

Схема пинов DFRobot Beetle shield
Рабочее напряжение DFRobot Beetle shield 3-5 Вольт.
Другие детали робота-насекомого

9-ти граммовый микро-сервопривод

Инфракрасный датчик расстояния. Фото с Aliexpress
В комплекте также подробная инструкция, необходимые соединительные провода и литиевая батарея 3.7 Вольт/ 180 мА*ч с зарядным устройством.
Для сборки потребуются паяльник, ножницы, отвертка, плоскогубцы, которых нет в комплекте.
Видео-инструкция сборки робота-насекомого:
Программирование Arduino-робота-жука
Начинающим можно использовать визуальные среды программирования, например, Ardublock, позволяющие запрограммировать робота путем простого перетаскивания предварительно разработанных блоков.

Визуальное программирование в ArduBlock
И, конечно, можно использовать Arduino IDE. Пример кода можно взять на сайте производителя.
Обзор готовых роботов-жуков


Жук с пультом д/у. Фото Aliexpress
Насекомое с датчиком обнаружения препятствий.Фото Aliexpress
Такие забавные и недорогие готовые роботы являются игрушками с ограниченным функционалом. Если же хочется не просто поиграть, а самому сконструировать и запрограммировать миниатюрного робота, то подойдет рассмотренный в сегодняшней статье комплект. После сборки и программированию по инструкции можно заняться дальнейшим развитием робота, например сделать ему крылья, усовершенствовать программный код. Или полностью с нуля создать Arduino-робота-жука своими руками. Для этого потребуются:
Если хочется сделать управление насекомым с телефона, можно попробовать снабдить робота модулем Bluetooth. Удачного жукостроения!
Все цены приведены по состоянию на день выхода статьи.
Структурная схема
В начальном состоянии жук всегда едет вперед. Это задается сочетаем сигналов двигателей. Если срабатывает один из датчиков, то блок триггеров (TRIGGER) разрешает работу тактового генератора (CLOCK SOURCE) и счетчика, который входит в блок DIRECTION SELECTOR.
Во время счета жук выполняет последовательность действий для объезда препятствия. Сначала он останавливается, затем делает паузу, отъезжает назад, делает паузу, поворачивает налево или направо, снова делает паузу и возобновляет движение. На пятый такт работы происходит сброс триггера.
В зависимости от сработавшего датчика жук поворачивает налево или направо. Блок выбора направления движения формирует четыре сигнала управления двигателями – по два на каждый драйвер. Сочетания логических уровней этих сигналов позволяет вращать двигатель вперед или назад, либо остановить двигатель. Поворачивает жук за счет того, что колеса вращаются в противоположные стороны.
Питание всей схемы осуществляется от двух LiIon-аккумуляторов типоразмера 18650, включенных последовательно, либо внешнего источника питания с напряжением 7-9В. Питание на драйверы двигателей подается через “хлопковый выключатель” (CLAP SWITCH). Это позволяет остановить или возобновить движение хлопком в ладоши.
Для регулировки скорости движения жука используется регулируемый генератор ШИМ-сигнала (PWM).
Структурная схема и сигналы.
Жук робот

Жук робот – очень простой и эффективный робот, которому не нужны электрические компоненты чтобы избегать препятствий на своем пути. Он использует два микро-переключателя, чтобы избежать столкновения с препятствием или освободиться. В нем нет интегральной микросхемы, транзистора, резистора, конденсатора и т.д. Собрать его будет очень просто и дешево!
Основой модификации является перекрестная антенна. Если она у вас есть, то препятствия вроде ножки стула не будут представлять для робота никакой трудности. Робот сможет обойти ее. В предыдущей модификации данной модели использовалась антенна формы V, и ножка стула могла попасться как раз в ее середину. В этой ситуацию роботу было сложно выбраться.
Перекрестная антенна так же проста при сборке робота. Переключатели находятся ближе друг к другу, и это помогает паять проволоку.
Вот вам наглядная видео-инструкция про робота-жука и его устройство:

Вот что нам нужно, чтобы построить такого робота-жука:
2 х 1,5V мотор 2 х SPDT (однополюсный с двумя направлениями) переключатели с металлическим рычагом 2 х АА или ААА батарейки 2 х концевых зажима 1 х пластмассовая или деревянная бусина 1 х 2,5 см х 7,5 см кусочек металла или алюминия 1 х тумблер для вкл/выкл Скрепки большие и маленькие 60 см проволоки размера 0,5-0,6 мм Термоусадочная пластиковая трубочка, которая будет соответствовать валу двигателя, и также трубочки, которая будет соответствовать соединителю. Изоляционная лента и бумажный скотч.
Детали для оболочки жука:
Круглая пластиковая крышка для туловища робота Краска-спрей (любой цвет) Прозрачный лак Авто шпатлевка или эпоксидный клей 2 х маленьких магнита для туловища. Нужен мотор на 1,5 Вольта (не 3 и не 12 Вольт!) Для каждого мотора будет нужна АА батарейка. Если мотор будет более мощный, батарейка быстро разрядится. Мотор можно взять из маленькой машинки или вентилятора.
Было бы неплохо иметь при себе:

Микро-переключатель для робота должен быть очень чувствительным! Можно найти его, разбирая старые железки.
Прикрепляем переключатели к держателю батарей. Нужно перекрестить антенны, чтобы наш робот не мог застрять в ножке стула. Склейте их так, как показано на картинке. Горячий клей подойдет.

Мы сделаем крепление для двигателя, вместо того, чтобы просто приклеить двигатель к держателю батареек. Это будет выглядеть более профессионально!
Где пригодятся поделки жуков
Эксклюзивные поделки из цветной бумаги в виде объемных насекомых или аппликаций, будут прекрасным подарком для близкого человека, друга на День Рождения. Панно, созданное маленькими ручками малышей, будет бесконечно дорого для бабушек и дедушек, и, конечно родителей.
Поделки жуков могут быть уместными при тематическом оформлении помещений для различных встреч, торжеств, например, на хеллоуин или день охраны окружающей среды. Объемные поделки и маски обязательно станут центром внимания на детских или юношеских (в садах, школах, лагерях, студенческих мероприятиях) праздниках, и вечеринках.
Увлекающий процесс изготовления обязательно заинтересует не только одного человека, но и группы людей. Это значит, что во время создания поделок, люди (дети, взрослые), имея общие интересы, найдут новых друзей.
Примеры поделок жуков
Робот жучок
а вот и все детали

1. режим эл. провод на 13 кусочков по 6см и снимаем с них изоляцию (с двух сторон) по 1 см.

2. Припаеваем провода к каждому из компонентов (кроме батареек) см. рисунок.

припаеваем провод к бат. держателю (синий)(third connection)


4. Приклейте 2 моторчика между переключателями так, чтобы сама ходовая часть моторчика касалась земли
5. Из большой скрепки и шарика делаем стабилизатор ( колесо, чтоб проще передвигатся по поверхности)
вот так всё это должно смотрется

7. берем 2 мал. скрепочки и делаем из них усы для жука

8. осторожно приклеиваем усы к переключателям (используйте немного клея для этого, чтоб не заклеить сам переключатель)

9. наматываем немного изоляции на ходовую часть моторчика (для лучшего сцепления)

10. Вставляем батарейки

Это не очень сложно. Сам недавно делал.
Прикол в том, что когда он дотрагивается до препятствия правым усиком, то провое колесо останавливается и он поварачивает влево, и наоборот. ( Объезжает препятствия )











Виды жуков со схемами
Можно изучить и освоить по видео сразу несколько схем изготовления жука из бумаги. Среди них красавец геркулес (со сложной сборкой):
Объемный и деловитый – жук-носорог:
Оригами
Чтобы поделка оригами жук получилась красивой, следует выполнять сборку по этапам, предварительно ознакомившись со схемой:
Сборка оригами жук закончена.
Во время поэтапного изготовления оригами жука следует не забывать о том, что сгибы надо тщательно проглаживать.
Жуки одни из самых многочисленных представителей насекомых. Поэтому сборку в стиле оригами можно изучать на многих представителях этого вида. Модели жуков в максимально приближенном к реальному виде, любят мастерить и взрослые, и дети.
Одна из самых простых вариантов оригами жука следующий:
Оставшиеся острые углы в заготовке тела подгибают, оформляя округлую форму тела насекомого, дорисовывают выразительные глаза – поделка готова, с ней справится даже ребенок.
Относительно простое устройство, которое представляет собой мобильную платформу с датчиками препятствий в виде концевых выключателей. Устройство объезжает препятствия, включается/выключается по хлопку, имеет регулировки скорости и времени объезда. Все, включая драйвер, выполнено на дискретных логических элементах.
Устройство разработано для изучения различных схемотехнических решений, а также может быть использовано для тренировки навыков пайки, так как включает в себя много разных типов корпусов радиоэлементов.
Робот-жук. Общий вид
Простейший робот-жук
Идея конструкции не нова, здесь просто собраны вместе как сама идея, так и ее реализация из простых и доступных материалов.
Эта игрушка движется вперед при помощи двух моторов. Как только один из ее усов касается препятствия, мотор со стороны этого уса начинает вращаться в обратную сторону и жук поворачивает до тех пор, пока не объедет препятствие. Конструкция наглядно показывает принцип действия контактных датчиков.
На видео показано как все происходит
В конструкции применены две батарейки AA, два мотора от детских игрушек, два контактных датчика.
Для начала сделаем эскиз расположения элементов робота на его корпусе. После чего нарисуем контур самого корпуса (шаблон) и распечатаем все это на листе бумаги.
Теперь можно приступать у сборке.
Вот основные детали, которые нам потребуются
Кроме того я использовал термоусадочную трубку большого (22 мм) и малого (5 мм) диаметра и крепежные винты с гайками M2.5.
Берем лист с шаблоном корпуса
накладываем шаблон на банку и определяем какой ширины полосу жести от банки надо отрезать
что потом и делаем.
ВНИМАНИЕ! Работа с жестью опасна тем, что можно легко порезаться об острые зазубренные края в месте среза. Будьте осторожны!
Далее накладываем шаблон на вырезанную жесть и вырезаем по шаблону заготовку корпуса.
и сверлим отверстие для оси этого колеса
далее сверлим отверстия для крепления батарейного отсека (кстати в жести отверстия можно просто прокалывать шилом)
Крепим контейнер винтами и вставляем колесо
теперь размечаем отверстия для крепления датчиков
Теперь пайка. Припаиваем проводники к моторам.
рекомендуем использовать разноцветные проводники и припаивать проводники одинакового цвета к одинаково расположенным выводам деталей, что облегчит окончательное подключение всего.
Так как на нашей схеме между батареями включен средний провод, подсоединяем его к контейнеру, продевая провод через отверстие контейнера со стороны, обратной той, из которой выходят плюсовой и минусовой провода и прикручиваем зачищенную часть нового проводника к пружинке, соединяющей выводы батареек.
припаиваем проводники к датчикам
Крепим моторы к корпусу. Для этого нам потребуются два отрезка толстой термоусадочной трубки длиной примерно 1 см.
кладем мотор сверху на выступ корпуса, надеваем на мотор и выступ колечко термоусадки и нагреваем все это (строительным феном, зажигалкой или кожухом вокруг жала паяльника)
после крепления обоих моторов берем тонкую термоусадочную трубку, надеваем на вал моторчика и усаживаем. Это нужно для того чтобы вал моторчика не царапал поверхность, по которой будет ездить и для увеличения скорости жука. Мы эту трубку надевали в два слоя для более высокой скорости.
лишний кусок трубки отрезаем кусачками
и теперь изолируем термоусадкой все наши электрические соединения.
а сами усы сделаем из электромонтажного одножильного провода сечением 1,5 кв. мм
и обжимаем усы в гнезде клемм
после чего сами клеммы насаживаем на чувствительную пластину датчиков и плотно прижимаем плоскогубцами
вот так устрашающе выглядят эти усы в собранном виде. моторы надо отогнуть вниз так, чтобы жук опирался на их оси как на ноги. Чем больше угол, на который вы их отгибаете, тем меньше скорость будет у Вашего жука
и вот, собственно наш жук в готовом виде
Что еще можно с нашим жуком сделать:
Все это мы и будем делать на занятиях по началам робототехники в нашем клубе этой осенью.
Вначале кусачками, острым ножом или ножовкой отрезаем головку зубной щётки.
Обратите внимание на наклон щетинок щётки, представленной на фотографии. Если вы используете зубную щётку с прямыми щетинками, то вам нужно будет предварительно придать некоторый наклон щетинкам. Это можно сделать с помощью обыкновенного кипятка.
Далее припаиваем две проволоки к контактам вибромотора. Если теперь подсоединить мотор к батарее, он будет вибрировать благодаря быстрому вращению эксцентрика (груз со смещённым центром тяжести), закреплённого на оси.
Вибромотор приклеиваем с помощью двухстороннего скотча к основанию головки зубной щётки таким образом, чтобы ничто не мешало вращению эксцентрика на оси мотора. Следом за ним устанавливаем батарейку от часов.
Плата-аналог Arduino DFRobot Beetle (жук)
Аналог Arduino — плата DFRobot Beetle
Слева направо: Arduino-совместимые платы DFRobot Leonardo, Nano, Nova, Beetle
Спецификация платы DFRobot Beetle:
Плата DFRobot Beetle (аналог Arduino) на плате расширения
Схема пинов на плате расширения:
Схема пинов DFRobot Beetle shield
Рабочее напряжение DFRobot Beetle shield 3-5 Вольт.
Другие детали робота-насекомого
9-ти граммовый микро-сервопривод
Инфракрасный датчик расстояния. Фото с Aliexpress
В комплекте также подробная инструкция, необходимые соединительные провода и литиевая батарея 3.7 Вольт/ 180 мА*ч с зарядным устройством.
Для сборки потребуются паяльник, ножницы, отвертка, плоскогубцы, которых нет в комплекте.
Видео-инструкция сборки робота-насекомого:
Программирование Arduino-робота-жука
Начинающим можно использовать визуальные среды программирования, например, Ardublock, позволяющие запрограммировать робота путем простого перетаскивания предварительно разработанных блоков.
Визуальное программирование в ArduBlock
И, конечно, можно использовать Arduino IDE. Пример кода можно взять на сайте производителя.
Обзор готовых роботов-жуков
Жук с пультом д/у. Фото Aliexpress
Насекомое с датчиком обнаружения препятствий.Фото Aliexpress
Такие забавные и недорогие готовые роботы являются игрушками с ограниченным функционалом. Если же хочется не просто поиграть, а самому сконструировать и запрограммировать миниатюрного робота, то подойдет рассмотренный в сегодняшней статье комплект. После сборки и программированию по инструкции можно заняться дальнейшим развитием робота, например сделать ему крылья, усовершенствовать программный код. Или полностью с нуля создать Arduino-робота-жука своими руками. Для этого потребуются:
Если хочется сделать управление насекомым с телефона, можно попробовать снабдить робота модулем Bluetooth. Удачного жукостроения!
Все цены приведены по состоянию на день выхода статьи.
Структурная схема
В начальном состоянии жук всегда едет вперед. Это задается сочетаем сигналов двигателей. Если срабатывает один из датчиков, то блок триггеров (TRIGGER) разрешает работу тактового генератора (CLOCK SOURCE) и счетчика, который входит в блок DIRECTION SELECTOR.
Во время счета жук выполняет последовательность действий для объезда препятствия. Сначала он останавливается, затем делает паузу, отъезжает назад, делает паузу, поворачивает налево или направо, снова делает паузу и возобновляет движение. На пятый такт работы происходит сброс триггера.
В зависимости от сработавшего датчика жук поворачивает налево или направо. Блок выбора направления движения формирует четыре сигнала управления двигателями – по два на каждый драйвер. Сочетания логических уровней этих сигналов позволяет вращать двигатель вперед или назад, либо остановить двигатель. Поворачивает жук за счет того, что колеса вращаются в противоположные стороны.
Питание всей схемы осуществляется от двух LiIon-аккумуляторов типоразмера 18650, включенных последовательно, либо внешнего источника питания с напряжением 7-9В. Питание на драйверы двигателей подается через “хлопковый выключатель” (CLAP SWITCH). Это позволяет остановить или возобновить движение хлопком в ладоши.
Для регулировки скорости движения жука используется регулируемый генератор ШИМ-сигнала (PWM).
Структурная схема и сигналы.
Жук робот
Жук робот – очень простой и эффективный робот, которому не нужны электрические компоненты чтобы избегать препятствий на своем пути. Он использует два микро-переключателя, чтобы избежать столкновения с препятствием или освободиться. В нем нет интегральной микросхемы, транзистора, резистора, конденсатора и т.д. Собрать его будет очень просто и дешево!
Основой модификации является перекрестная антенна. Если она у вас есть, то препятствия вроде ножки стула не будут представлять для робота никакой трудности. Робот сможет обойти ее. В предыдущей модификации данной модели использовалась антенна формы V, и ножка стула могла попасться как раз в ее середину. В этой ситуацию роботу было сложно выбраться.
Перекрестная антенна так же проста при сборке робота. Переключатели находятся ближе друг к другу, и это помогает паять проволоку.
Вот вам наглядная видео-инструкция про робота-жука и его устройство:
Вот что нам нужно, чтобы построить такого робота-жука:
2 х 1,5V мотор 2 х SPDT (однополюсный с двумя направлениями) переключатели с металлическим рычагом 2 х АА или ААА батарейки 2 х концевых зажима 1 х пластмассовая или деревянная бусина 1 х 2,5 см х 7,5 см кусочек металла или алюминия 1 х тумблер для вкл/выкл Скрепки большие и маленькие 60 см проволоки размера 0,5-0,6 мм Термоусадочная пластиковая трубочка, которая будет соответствовать валу двигателя, и также трубочки, которая будет соответствовать соединителю. Изоляционная лента и бумажный скотч.
Детали для оболочки жука:
Круглая пластиковая крышка для туловища робота Краска-спрей (любой цвет) Прозрачный лак Авто шпатлевка или эпоксидный клей 2 х маленьких магнита для туловища. Нужен мотор на 1,5 Вольта (не 3 и не 12 Вольт!) Для каждого мотора будет нужна АА батарейка. Если мотор будет более мощный, батарейка быстро разрядится. Мотор можно взять из маленькой машинки или вентилятора.
Было бы неплохо иметь при себе:
Микро-переключатель для робота должен быть очень чувствительным! Можно найти его, разбирая старые железки.
Прикрепляем переключатели к держателю батарей. Нужно перекрестить антенны, чтобы наш робот не мог застрять в ножке стула. Склейте их так, как показано на картинке. Горячий клей подойдет.
Мы сделаем крепление для двигателя, вместо того, чтобы просто приклеить двигатель к держателю батареек. Это будет выглядеть более профессионально!
Где пригодятся поделки жуков
Эксклюзивные поделки из цветной бумаги в виде объемных насекомых или аппликаций, будут прекрасным подарком для близкого человека, друга на День Рождения. Панно, созданное маленькими ручками малышей, будет бесконечно дорого для бабушек и дедушек, и, конечно родителей.
Поделки жуков могут быть уместными при тематическом оформлении помещений для различных встреч, торжеств, например, на хеллоуин или день охраны окружающей среды. Объемные поделки и маски обязательно станут центром внимания на детских или юношеских (в садах, школах, лагерях, студенческих мероприятиях) праздниках, и вечеринках.
Увлекающий процесс изготовления обязательно заинтересует не только одного человека, но и группы людей. Это значит, что во время создания поделок, люди (дети, взрослые), имея общие интересы, найдут новых друзей.
Примеры поделок жуков
Робот жучок
а вот и все детали
1. режим эл. провод на 13 кусочков по 6см и снимаем с них изоляцию (с двух сторон) по 1 см.
2. Припаеваем провода к каждому из компонентов (кроме батареек) см. рисунок.
припаеваем провод к бат. держателю (синий)(third connection)
4. Приклейте 2 моторчика между переключателями так, чтобы сама ходовая часть моторчика касалась земли
5. Из большой скрепки и шарика делаем стабилизатор ( колесо, чтоб проще передвигатся по поверхности)
вот так всё это должно смотрется
7. берем 2 мал. скрепочки и делаем из них усы для жука
8. осторожно приклеиваем усы к переключателям (используйте немного клея для этого, чтоб не заклеить сам переключатель)
9. наматываем немного изоляции на ходовую часть моторчика (для лучшего сцепления)
10. Вставляем батарейки
Это не очень сложно. Сам недавно делал.
Прикол в том, что когда он дотрагивается до препятствия правым усиком, то провое колесо останавливается и он поварачивает влево, и наоборот. ( Объезжает препятствия )
Виды жуков со схемами
Можно изучить и освоить по видео сразу несколько схем изготовления жука из бумаги. Среди них красавец геркулес (со сложной сборкой):
Объемный и деловитый – жук-носорог:
Оригами
Чтобы поделка оригами жук получилась красивой, следует выполнять сборку по этапам, предварительно ознакомившись со схемой:
Сборка оригами жук закончена.
Во время поэтапного изготовления оригами жука следует не забывать о том, что сгибы надо тщательно проглаживать.
Жуки одни из самых многочисленных представителей насекомых. Поэтому сборку в стиле оригами можно изучать на многих представителях этого вида. Модели жуков в максимально приближенном к реальному виде, любят мастерить и взрослые, и дети.
Одна из самых простых вариантов оригами жука следующий:
Оставшиеся острые углы в заготовке тела подгибают, оформляя округлую форму тела насекомого, дорисовывают выразительные глаза – поделка готова, с ней справится даже ребенок.
Читайте также: