
Как сделать поворотные колеса на машинке
Обновлено: 05.07.2024
Не только дети любят автомобили с дистанционным управлением. Проводные танкетки применяли немецкие и японские войска в годы второй мировой войны. Использовали такие приспособления и в Чернобыле. Сделать такую систему управления можно из подручных средств.

- Как сделать управление к машинке
- Как сделать машинку с пультом управления
- Как собрать машинку на пульте управления
- - крупная машинка;
- - 2 электродвигателя;
- - гибкий многожильный кабель;
- - пластмассовая коробка;
- - лист фанеры;
- - тумблеры;
- - кнопки;
- - батарейки;
- - понижающий редуктор;
- - набор инструментов.
Возьмите машинку с поворотным передним мостом. Иначе придется его делать самостоятельно. В продаже имеется довольно большой ассортимент таких игрушек.
Обеспечьте машинке передний и задний ход. К одному или обоим задним колесам через понижающий редуктор подключите электродвигатель. Электродвигатели могут быть одинаковыми. Их можно взять из старых игрушек, магнитофонов, CD-приводов и т.д. Годится любой небольшой мотор.
При отсутствии редуктора наденьте на выступающий участок оси мотора пластиковую или резиновую трубку. Подойдет ниппель от велосипеда. Установите двигатель так, чтобы обрезиненная часть оси входила во фрикционное соединение с внешней поверхностью одного из задних колес автомобиля.
Подберите батареи питания так, чтобы скорость автомобиля была приемлемой. Он не должен ездить слишком быстро, иначе им трудно будет управлять.
Для механизма поворота вырежьте из листа фанеры или пластика полукруг диаметром, равным длине передней оси автомобиля. Обычно рулевое управление игрушек осуществляется поворотом полностью, что несколько упрощает задачу создания механизма поворота. Со стороны днища автомобиля жестко закрепите полукруг на кронштейне крепления оси так, чтобы он не мешал вращению колес.Полукруг должен лежать горизонтально.
В зависимости от конструкции автомобиля, второй моторчик, то есть двигатель управления, можно расположить как вертикально, так и горизонтально. Но он должен быть на середине дуги. Важно, чтобы его обрезиненная ось, как и в первом случае, входила в зацепление с внешней дугой полукруга или с ближайшим к ней горизонтальным участком. Во втором случае хорошо бы прикрепить двигатель так, чтобы полукруг лежал сверху на обрезиненной оси. Подберите батарейки, чтобы поворот был плавным.
Пульт управления смонтируйте в пластмассовой коробке. Используйте 2 тумблера на 3 положения (то есть такие, у которых есть центральная нейтральная позиция). В этой конструкции батареи располагаются в самом автомобиле, поэтому все, что вам остается сделать - соединить гибким многожильным кабелем переключатели пульта управления с двигателями или батареями машинки. Сделать это необходимо так, чтобы в нейтральной точке обоих переключателей питание от двигателей отключалось. При положении выключателя хода "вперед-назад" полярность питания двигателя хода должна меняться в соответствии с положением тумблера. Точно так же положение переключателя поворота влево и вправо должно менять полярность двигателя механизма поворота.


Часовой пояс: UTC + 3 часа
Радиоуправляемая машинка не поворачивает
здравствуйте, подскажите в чем может быть проблема, машинка не поворачивает, моторчик проверял - работает
В первую очередь проверить транзисторы входящие в состав Н-моста, т.к. через них идут большие токи. Поэтому эти транзисторы являются самым слабым местом.
Возможно, что Н-мост там не на транзисторах, а стоит драйвер двигателя, т.е. тот же Н-мост, только в интегральном исполнении. В этом случае проверить этот драйвер.
Попытался рассмотреть, что там за микросхемы на фото платы, но как это обычно бывает, ничего не разобрал.
Потом будете проверять проходит ли команда посланная с передатчика, если она вообще передатчиком посылается.
JLCPCB, всего $2 за прототип печатной платы! Цвет - любой!
H-мост на Si2301+Si2302/2312 там для тягового двигателя. А для поворотов обычно используется рулевая машинка/сервомашинка, так что начать следует с её проверки. Для проверки рулевой машинки понадобится сервотестер .
_________________
Большой опыт, порой, не даёт находить/видеть нам простые и очевидные решения.
Всегда с уважением, Александр.
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет

как я понял стоит обычный моторчик, а не сервопривод, его я проверил работает
Необходим быстродействующий преобразователь питания средней мощности с высоким КПД? Он должен быть компактным и недорогим? Решение – карбид-кремниевые модули средней мощности WolfPACK производства Wolfspeed. В статье рассмотрены основные особенности модулей WolfPACK и показано, что переход на эту универсальную и масштабируемую платформу позволяет не только быстро разработать новые устройства, но и без значительных затрат времени и средств модернизировать уже существующие схемы на традиционной элементной базе.
_________________
90% времени уходит на отыскание неисправности,остальное - ждать когда нагреется паяльник!
Критически важные распределенные системы требуют синхронного преобразования во всех подсистемах и непрерывного потока данных. Распределенные системы сбора данных могут быть синхронизированы как на основе АЦП последовательного приближения, так и на основе сигма-дельта (∑-Δ)-АЦП. Новый подход, основанный на преобразователе частоты дискретизации (SRC), содержащемся в микросхемах линейки AD7770 производства Analog Devices, позволяет достигать синхронизации в системах на основе сигма-дельта-АЦП без прерывания потока данных.
Чтож, в таком случае alexradio1103 прав, это что-то типа драйвера двигателя L9110 (L9110 даже кажется по цоколёвке подходит ), и похоже этот драйвер того.
_________________
Большой опыт, порой, не даёт находить/видеть нам простые и очевидные решения.
Всегда с уважением, Александр.
8 ножка там на силовой тягу
рудежка там на SMD 8050\ 8550 мне попадала такая плата если 8ножка грется тоже наверно была переполюсовка силы и она пробита-тогда и бес команд грется будет и жрать батку а 8ххх сгорают тихо и без дыма-звонить надо в них по мобиле

_________________
Мудрость(Опыт и выдержка) приходит с годами.
Все Ваши беды и проблемы, от недостатка знаний.
Умный и у дурака научится, а дураку и ..
Алберт Ейнштейн не поможет и ВВП не спасет.и МЧС опаздает

На фото мы не смотрим? H-мост на Si2301+Si2302/2312 (видимо не хватило ещё одного Si2302 ) для тягового двигателя, синий и зелёный провода. На повороты идёт красный и два чёрных провода (я сначала думал на рулевую машинку, как раз 3 провода, и не придал значения драйверу в SO-8), но как теперь выяснилось что на рулевой машинке здесь сэкономили.
P.S
Ремонтировал пару тройку подобных моделек, везде на рулевой машинке повороты были.
_________________
Большой опыт, порой, не даёт находить/видеть нам простые и очевидные решения.
Всегда с уважением, Александр.
вы переоченивае китай какя РМ-стоит мелкий мотор редуктор с пластиковыми рычагами к колесам
от мотора 2 провода а не 3 идет! иногда tit стоит датчик поворота -типа концевиков там схема хитрее. не разрисовывал но походу чтото вроде интегратора-от длины нажатия зависит угол
_________________
Мудрость(Опыт и выдержка) приходит с годами.
Все Ваши беды и проблемы, от недостатка знаний.
Умный и у дурака научится, а дураку и ..
Алберт Ейнштейн не поможет и ВВП не спасет.и МЧС опаздает
_________________
90% времени уходит на отыскание неисправности,остальное - ждать когда нагреется паяльник!
Ну так теперь, по этому фото это понятно. А сначала по этому фото это было не так очевидно (три провода слева вверху).
а установка мосфетв на силу в корпусе SOT23 ЭТО нечто пожея плата имела 8550\8550SMD но на рулежке а сила была на чипе
L9110 и подобные имеют выходной ток около 0,7А. максимум до 1А., А Si2301/2302/2312 до 2,5А. И кто здесь для тяги, а кто для поворотов? Повторю, в моей практике попадались модельки с рулёжкой на рулевых машинках, а там свой драйвер.
_________________
Большой опыт, порой, не даёт находить/видеть нам простые и очевидные решения.
Всегда с уважением, Александр.
А тут в "пульте-пистолете" не серво-руль а тупо ещё 2 кнопки. И выдаёт он тоже всего 4 команды: вперёд-назад и влево-вправо ИМХО. Я встречал полно таких и очень редко, чтоб были на "серво".
_________________
90% времени уходит на отыскание неисправности,остальное - ждать когда нагреется паяльник!
Низ микросхемы ваще не интересует! Надпись - это номер(заводской) штампа, которым прессовали корпус.
Интересует именно верх. Отмойте тщательно! Ацетоном или любым растворителем.
Если там нет хоть следов букв/цифр, то наверняка просто затёрто - как раньше затирали напильником микр-ы "чтоб не угадали".
_________________
90% времени уходит на отыскание неисправности,остальное - ждать когда нагреется паяльник!
Это бесполезная информация. Сравните разводку со схемой включения L9110 выложенной alexradio1103, по ходу (на сколько я могу разглядеть) 99,72% что она там и стоит, или её аналог. Либо выкладывайте чёткое фото участка платы (чтобы были видны дорожки) выпаянной МС, если самостоятельно не разберётесь.
UPD:
_________________
Большой опыт, порой, не даёт находить/видеть нам простые и очевидные решения.
Всегда с уважением, Александр.
_________________
90% времени уходит на отыскание неисправности,остальное - ждать когда нагреется паяльник!
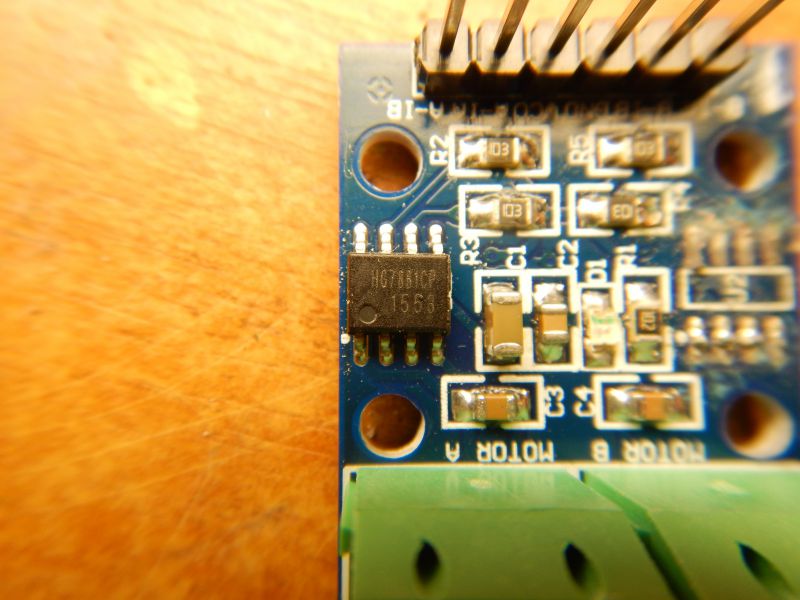
Схема включения L9110 один в один, начал искать L9110 для приобретения и не нашел в г.Новосибирске, только в составе "Модуля 2-х H-мостов для Arduino" где их 2шт, под заказ 10 дней, цена 150р. Получил а там другая маркировка на восьминожках, выпаял-впаял и все ОК, заработало!
Машинка по моему стала шустрее чем новая))), ребенок играет, доволен!
В общем всем спасибо кто помогал советами!
Часовой пояс: UTC + 3 часа
Кто сейчас на форуме
Powered by phpBB © 2000, 2002, 2005, 2007 phpBB Group
Русская поддержка phpBB
Extended by Karma MOD © 2007—2012 m157y
Extended by Topic Tags MOD © 2012 m157y
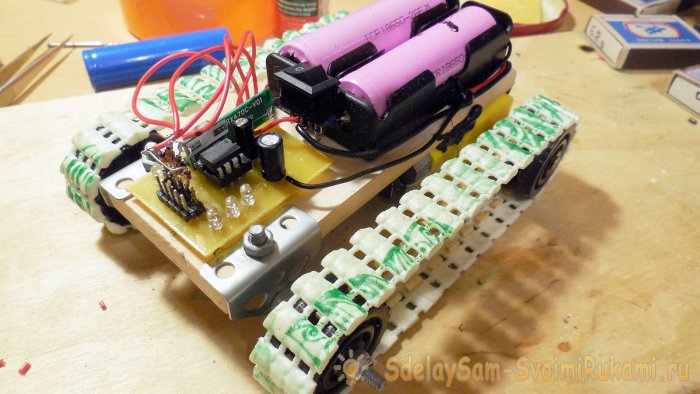
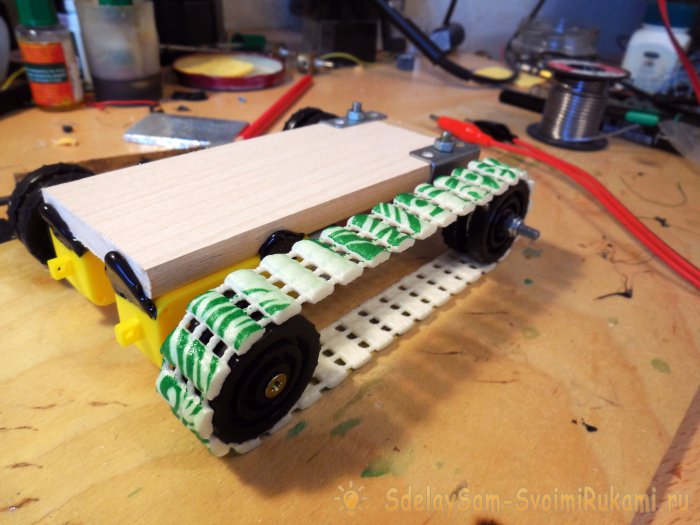
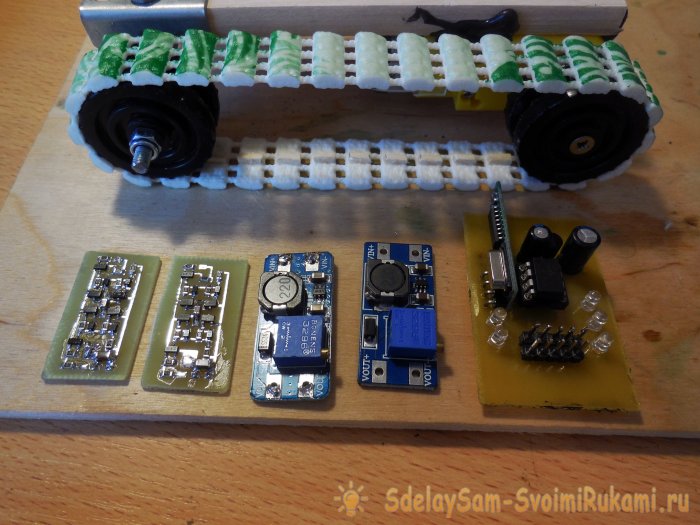
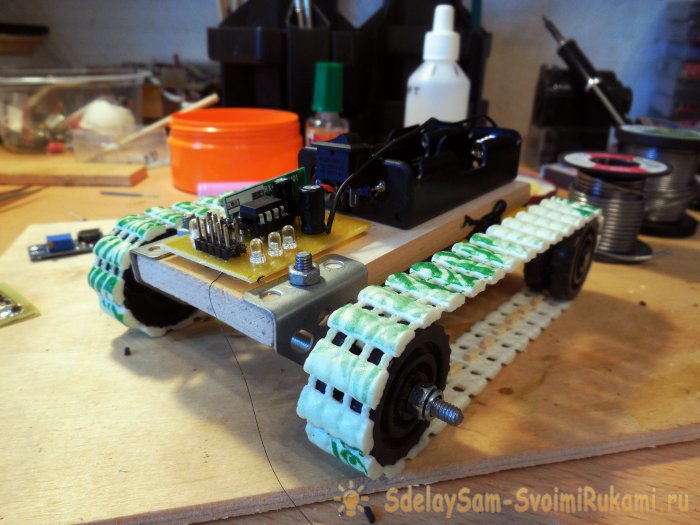
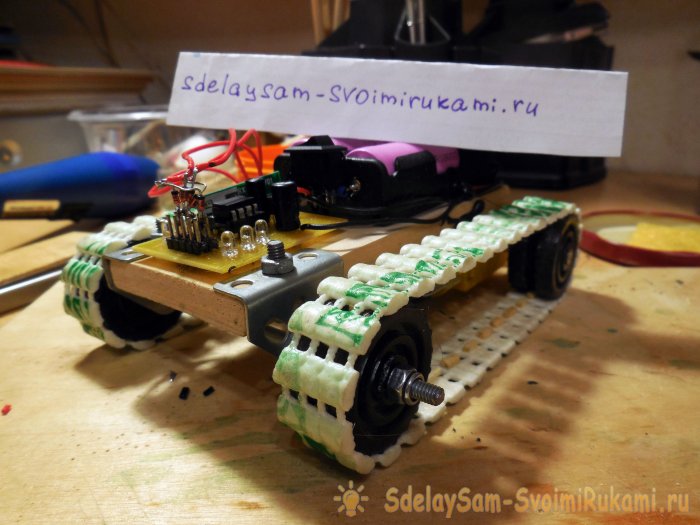
Рассмотрим создание машинки на гусеничном ходу с довольно элементарной конструкцией, собрать которую можно буквально за пару вечеров. Всю конструкцию условно можно разделить на две части – гусеничное шасси и электрическая часть, которая будет обеспечивать дистанционное управление машинкой с пульта.
Изготовление шасси
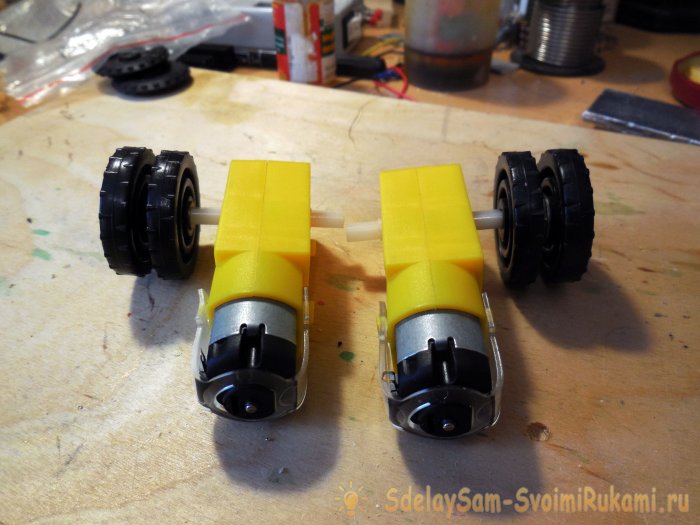
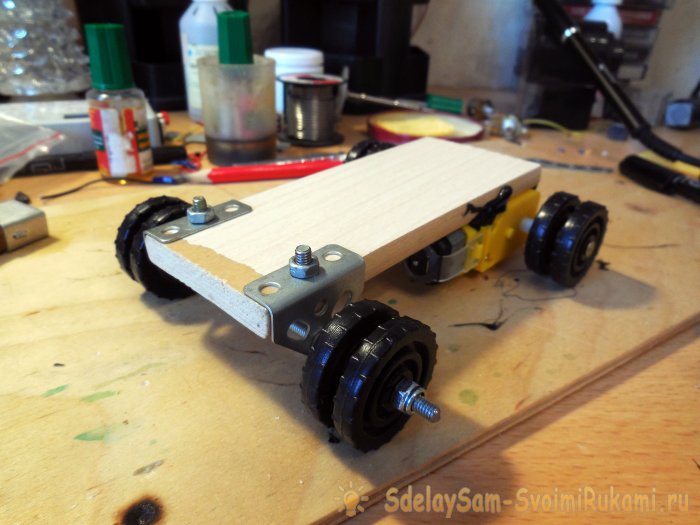
Каждый редуктор имеет выход на два вала, по разные стороны корпуса – для гусеничного шасси задействован будет только один вал с каждого мотора, второй можно удалить вовсе либо оставить на случай, если эти моторы ещё понадобятся в других проектах. На валы необходимо закрепить колёса – сделать это площе всего, вкрутив саморез в сам вал (внутри он полый), таким образом, колёса хорошо зажмутся. Для дополнительной фиксации, и чтобы не раскрутился саморез, можно обильно смазать соединение клеем. Обратите внимание, что колесо двойное – между каждым из колёс делается зазор примерно 3-4 мм, в дальнейшем с его помощью будет фиксироваться гусеница.

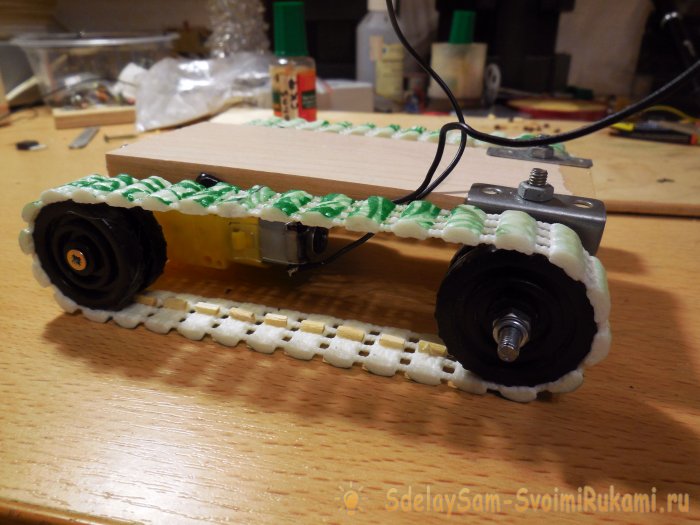
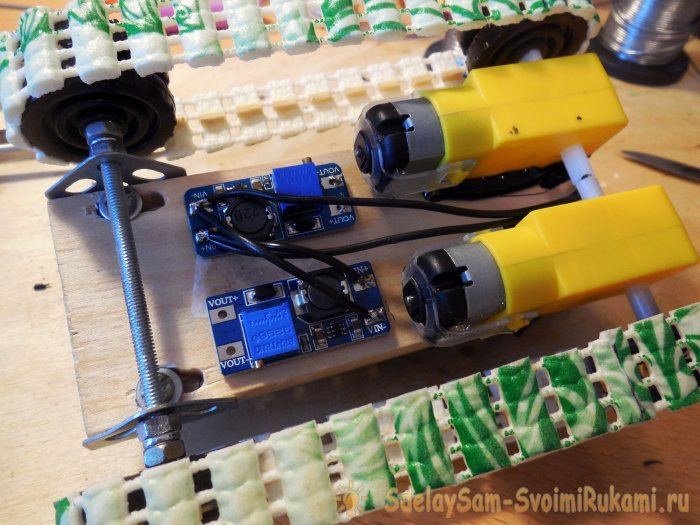
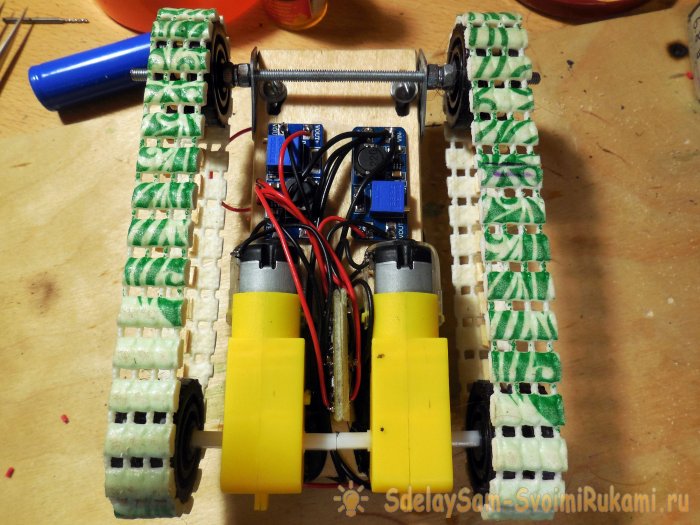
Моторы закрепляются на кусочке прочной фанеры, её размер можно выбрать произвольно, в зависимости от желаемых размеров машинки. Каких-либо удобных мест для крепления данные мотор-редукторы не предусматривают, поэтому зафиксировал я их с помощью термоклея – хорошие клеевые стержни обеспечивают отличное качество соединения, как показал опыт.
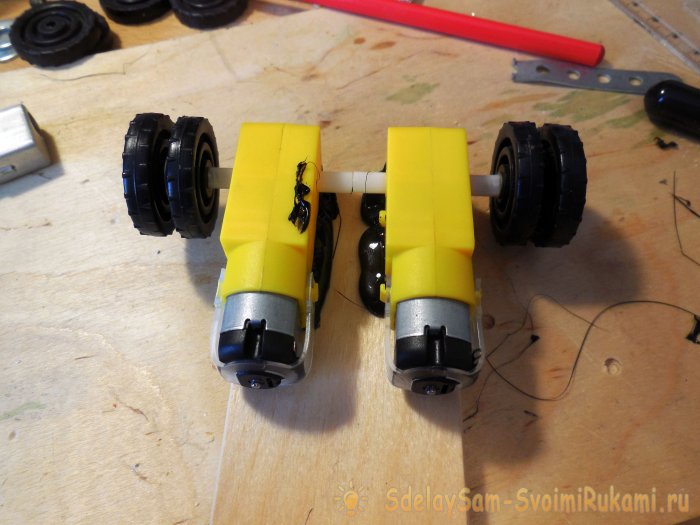
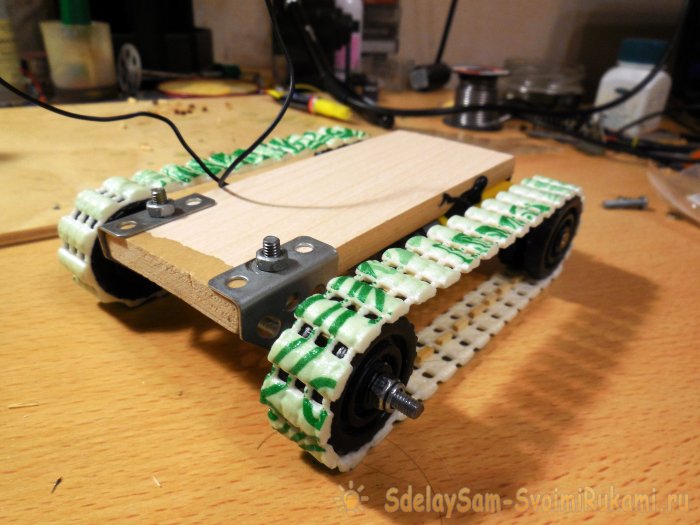
Далее в противоположной стороне от моторов необходимо закрепить уголки для оси передних колёс. Для этого очень рекомендую использовать детали от детского железного конструктора – там можно найти готовые уголки с отверстиями. При сверлении отверстия в фанерке нужно учитывать, что в дальнейшем понадобится регулировка натяжения гусениц, поэтому необходимо просверлить ряд отверстий длиной примерно 1-1,5 см, которые затем соединить в одну продолговатую прорезь. Таким образом, вся передняя ось будет двигаться взад-вперёд, фиксируясь болтами в нужном положении.
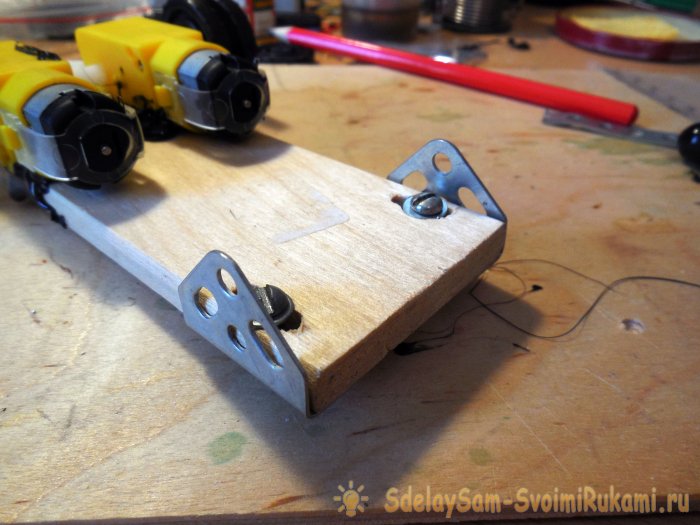
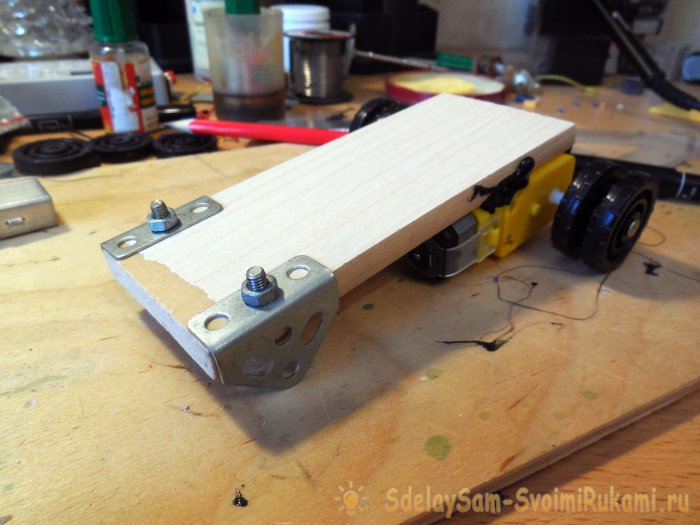
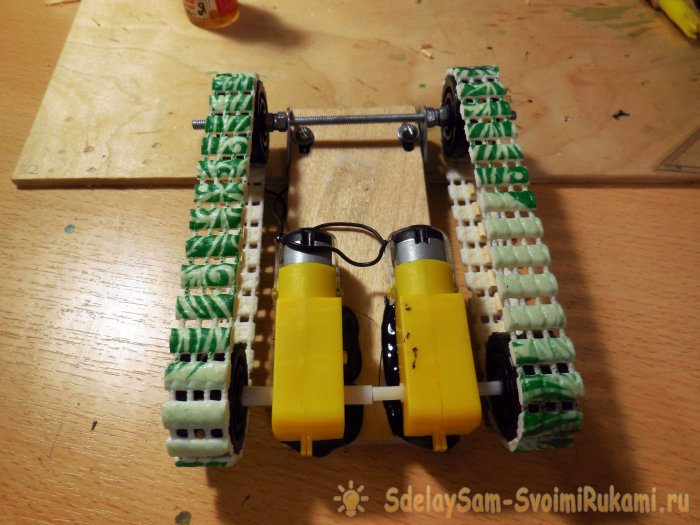
В отверстия в уголках продевается шпилька, удобно использовать м4, она даёт достаточную жёсткость и при этом подходит под отверстия в деталях железного конструктора. Шпильку необходимо жёстко закрепить на уголках, удобно использовать для этого гайки с фиксацией, они не раскрутятся сами собой, когда машинка начнёт ездить. По бокам устанавливаются те же двойные колёса, что и сзади, с точном таким же зазором. Колёса должны свободно вращаться на оси, обеспечить это можно теми же гайками с фиксацией. Обратите внимание, что левые и правые колёса должны вращаться независимо друг от друга. Такие колёса я взял в том же железном конструкторе, однако можно вырезать аналогичные и из пластика, либо из плотного картона, если сложить его в несколько слоёв и склеить.

Изготовление гусениц

Затем необходимо приложить ленту к закреплённым на шасси колёсам и отрезать её по необходимой длине, затем концы ленты склеиваются суперклеем. После того, как клей высохнет, можно примерить гусеницу на шасси и даже включить мотор – гусеница будет вращаться, однако быстро спадёт с колёс.
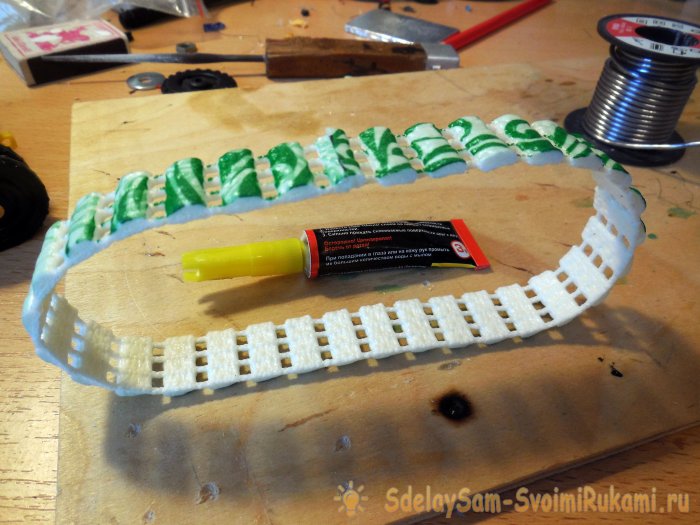

Все те же действия нужно сделать со второй гусеницей. После наклеивания спичек гусеницы можно считать готовыми – теперь они надеются на шасси и уже можно проверить, как поедет будущая машинка, подав напряжение с аккумулятора напрямую на оба мотора. При необходимости нужно отрегулировать силу натяжения – слишком слабая гусеница будет проворачиваться или спадать, а слишком сильно натянутая будет туго вращаться, оказывая дополнительную нагрузку на мотор.
Электрическая часть
Изготовление пульта
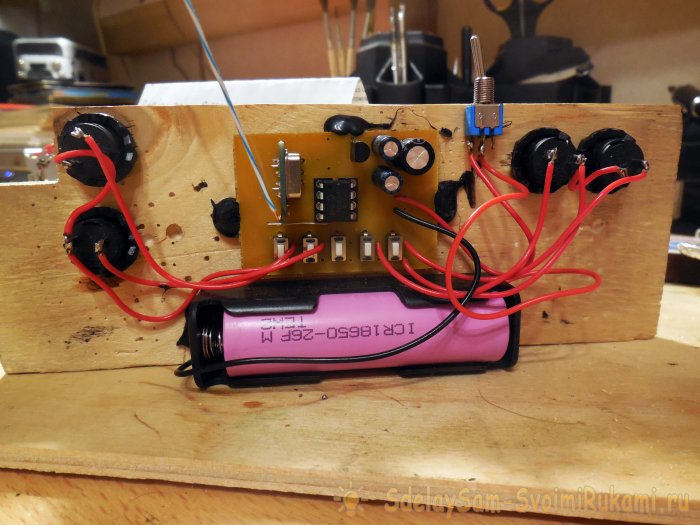
Как один из вариантов – использовать можно готовый пульт от какой-нибудь сломанной/ненужной радиоуправляемой игрушки, если внутри него достаточно места для установки платы кодера. Либо можно изготовить свой пульт, как я и сделал. В качестве основы применил ещё один обрезок фанеры, смонтировав на нём холдер для аккумулятора 18650, плату кодера с модулем-приёмником, а также 4 кнопки, расположив их по максимальному удобству управления. Обратите внимание, что плата кодера уже содержит посадочные места для кнопок на плату – их установка необязательна, разве что для проверки работоспособности после сборки. Рабочие кнопки выводятся с платы на проводах, как на фотографиях ниже.

Монтаж электроники на шасси
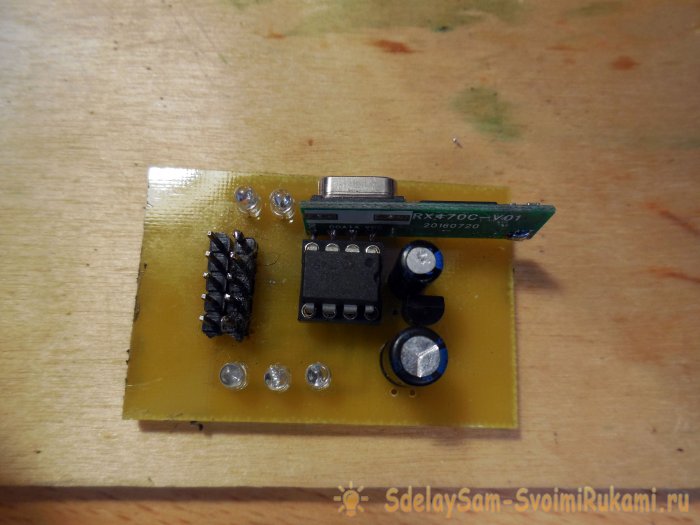
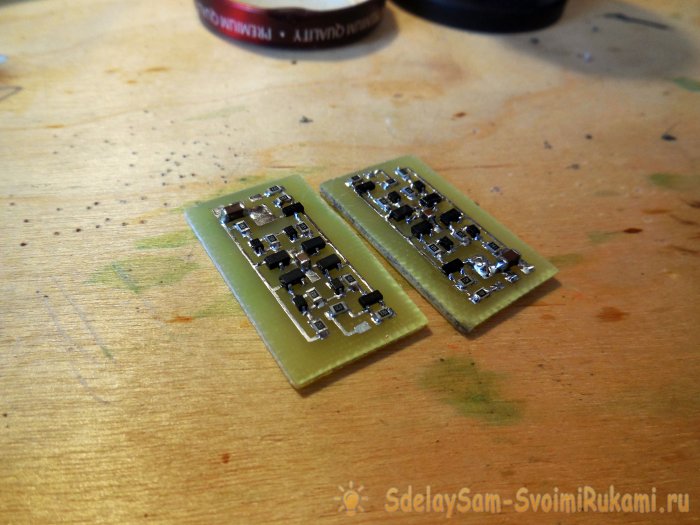
Подробное фото платы декодера. Обратите внимание, что она, так же, как и плата кодера, имеет несколько дополнительных конденсаторов по питанию – они точно не будут лишними в устройствах с микроконтроллерами.
Сборка мостовой схемы
Казалось бы – для чего нужна какая-то мостовая схема, ведь достаточно лишь с помощью ключа подавать напряжение на моторы. И она действительно не нужна в том случае, если машинке не требуется задний ход – а практика показывает, что без него совсем неинтересно. Таким образом, необходимо собрать небольшую дополнительную схемку, которая обеспечит смену полярности для мотора. Меняется полярность – меняется направление движения.
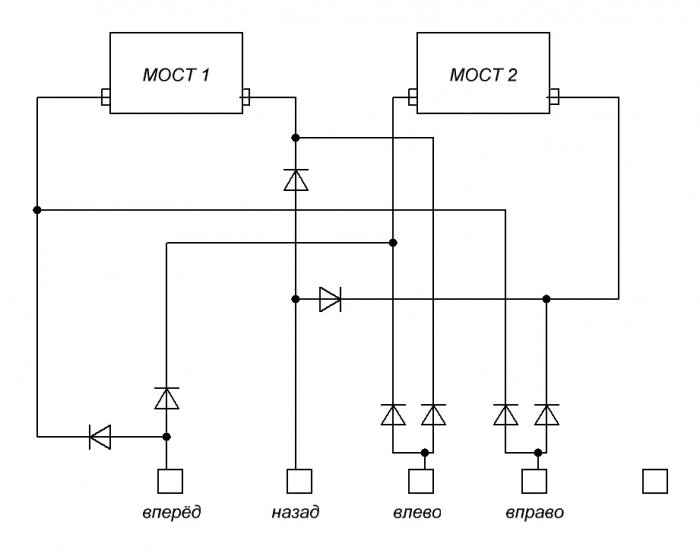
К данной схеме подключается двигатель, а также она содержит два входа – in1 и in2, подали 3-5 вольт на один вход – мотор вращается в одну сторону, подали 3-5 вольт на другой – мотор вращается уже в другую сторону. Если же напряжение не подаётся ни на один вход, либо подаётся на оба входа сразу – мотор не вращается, вот такая простая логика работы. На схеме имеется 4 полевых транзистора, которые будут коммутировать мотор, поэтому они должны быть рассчитаны на достаточно большой ток. Два из них N-канальные, можно использовать АО3400, другие два P-канальные, подойдут АО3401. Также на схеме присутствуют два биполярных NPN транзистора, подойдут BC847 или любые другие аналогичные. Для того, чтобы не занимать много места на шасси рекомендую собрать эту схему именно на SMD-компонентах. Диоды – любые понравившиеся, например, 1N4148W. На вход питания этой схемы (обозначен как 12 V) подаётся напряжение с преобразователя. Обратите внимание, что схему нужно собрать в двух экземплярах – для левого и правого мотора, соответственно питаться они будут с одного и со второго преобразователя. Фото собранных плат ниже.

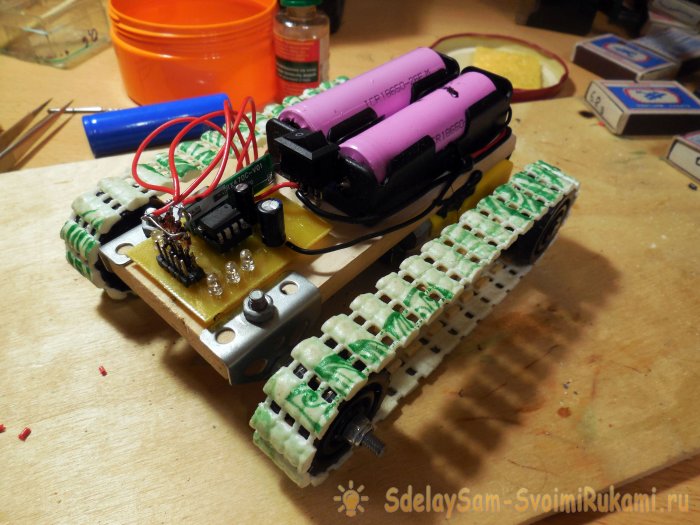
Теперь можно приступать непосредственно к монтажу – и первым делом стоит установить на верхнюю часть шасси пару холдеров под аккумуляторы 18650, именно от них будет питаться вся электроника, аккумуляторы соединяются параллельно.

Перед аккумуляторами, в передней части, устанавливается плата декодера, её сразу можно подключить через выключатель к контактам холдеров. Для удобства на этой плате дополнительно установлены 5 светодиодов – при нажатии на клавиши пульта будут загораться соответствующие светодиоды.
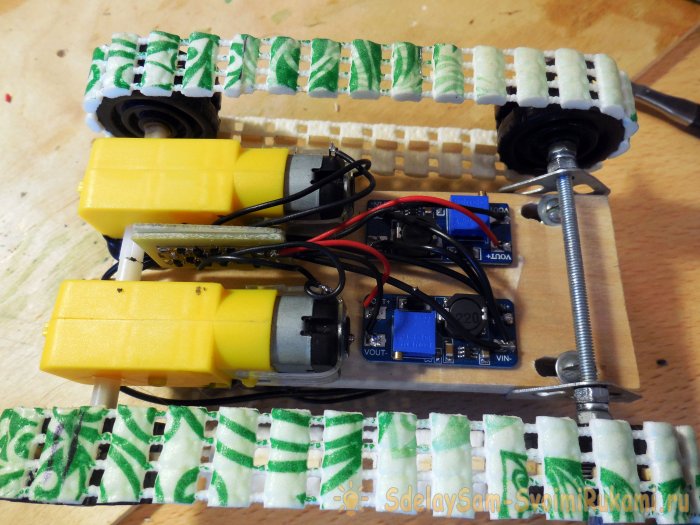
На нижнюю часть, под шасси, крепятся пара преобразователей и пара плат-мостов. Сразу всё соединяется проводами – входы преобразователей через выключатель к холдерам, выходы преобразователей на питание плат мостов, а выходы мостов, в свою очередь, уже к моторам. Следует учитывать, что моторы под нагрузкой могут потреблять достаточно большой ток, соответственно на входе преобразователей потребляемый ток будет ещё примерно в 2 раза больше и в некоторые моменты может достигать 1-1,5 ампера, поэтому нужно подводить питание достаточно толстыми проводами.
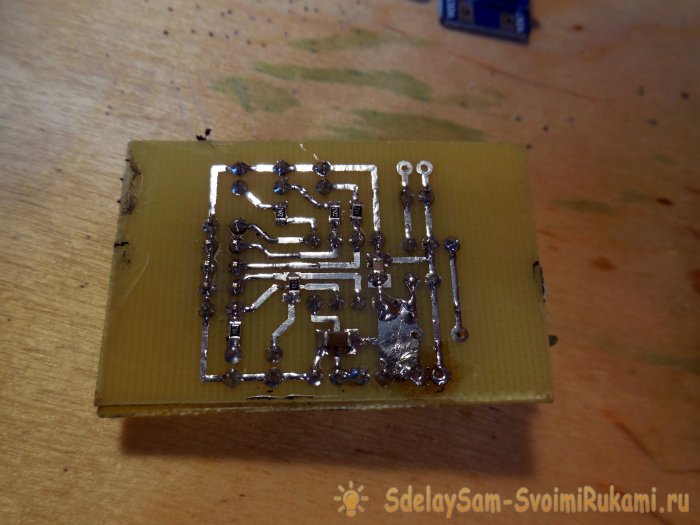
Снизу показаны выходы декодера, при этом один из них свободен, его можно задействовать для других действий. Диоды здесь можно использовать те же 1N4148, припаять их навесным монтажом прямо на выходах декодера.
Испытания
Смотрите видео
Вот потратились вы на игрушку для взрослых, а она не едет. Обидно же! Давайте это исправим.
Есть китайские радиоуправляемые игрушки. С управлением там всё просто: либо полный вперёд, либо полный назад, без промежуточных значений. С поворотом история та же — промежуточных значений нет. Опознать такие модельки можно по очень низкой цене, практически цельному днищу и специальному регулировочному винту оси передних колёс — он устанавливает центральное положение колёс, а поворот осуществляется моторчиком, который отклоняет колёса до упора в нужную сторону. Когда моторчик отпускает хватку, пружина возвращает колёса в центральное положение.
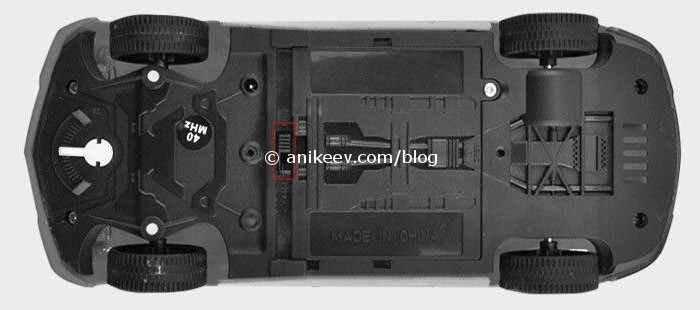
Белый рычажок на фото выше как раз регулирует центральное положение передних колёс. Но главное — у такой машины привод только на задние колёса, а закреплены они на единой оси. То есть мотор вращает оба задних колеса одинаково, а передние вообще болтаются как попало. Поэтому машина буксует, но всё-таки едет. Это хорошо. Зато управляется рывками — это плохо.
Любительские модели уровнем выше оснащаются пропорциональным управлением: на сколько повернул руль, настолько и колёса повернулись, насколько поддал газу, настолько машина и поехала. Начинка там значительно сложнее, часто появляется полный привод, некое подобие регулируемой подвески и — печаль-беда — настоящий взрослый дифференциал.

Что такое дифференциал? Это простейший механизм распределения крутящего момента на колёса оси. Он полезен для полноприводных машинок, ведь когда игрушка поворачивает, внешнее колесо передней оси совершает больше оборотов, чем внутренее. Но на задней оси тоже есть дифференциал — он добавляет реалистичности, но иногда мешает наслаждаться игрушкой: если вывесить одно колесо, то второе перестанет крутиться. Так что любительская модель отлично рулится, но плохо прёт по гравийке и пескам.
У взрослых машин проблема с вывешиванием колеса встречается только на серьёзном бездорожье. Но в песках, стоит одному колесу забуксовать, как его сосед по оси тут же отказывается крутиться. Это дифференциал, падла. В серьёзных вседорожниках дифференциал можно заблокировать, чтобы машина пёрла, как китайская игрушка, напролом. То же самое сделаем и мы для задней оси нашей машинки.
Я уже писал про свою машинку Turnigy 1/16 mini rally car, на ней все опыты и проводились. Но я не фиксировал процесс на камеру, так что объяснять буду на пальцах и картинках из интернета.

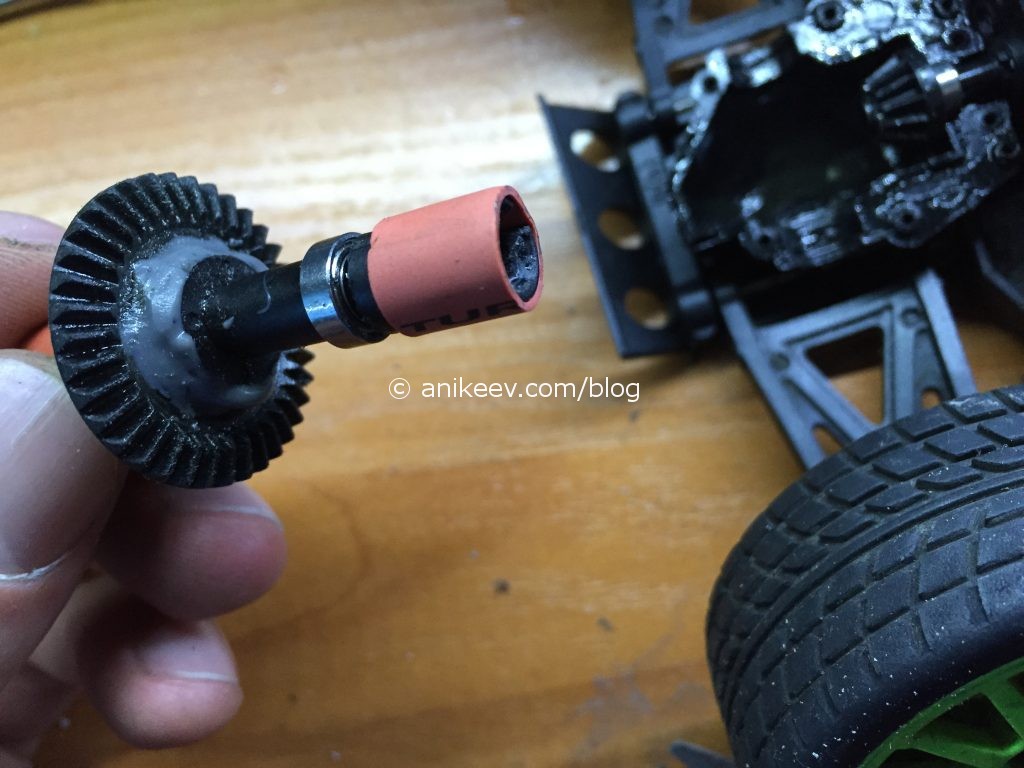
В общем случае дифференциал радиоуправляемой игрушки любительского уровня состоит из подающей шестеренки от кардана, крупной принимающей шестерёнки дифференциала, в которой есть три планетарных шестерёнки и к которым подключаются шестерёнки привода каждого колеса.

Планетарные шестерёнки внутри принимающей и обеспечивают распределение момента. Если мы не дадим им крутиться, то момент от мотора будет передаваться на колёса одинаково — прямо как на китайской игрушке. Так что возьмём эпоксидную смолу и от души накидаем на планетарные шестерни. Можно прям залить всю эту конструкцию.
С передним дифференциалом так поступать не советую — для уверенного преодоления грязи и гравия этого хватит. Но если вы гоняете исключительно по песку, заблокируйте и передний дифференциал.
Машинкой я владел лет пять назад, тогда же и производил блокировку. Вполне возможно, что сегодня есть более крутые дифференциалы с самоблокировкой и эта статья будет неактуальной.
Читайте также: