
Как сделать кулачок в компасе 3d
Добавил пользователь Владимир З. Обновлено: 04.10.2024
В ходе разработки различных изделий очень часто инженеру приходится сталкиваться со сборно-разборными способами примыкания деталей друг к другу. Основную часть таких соединений составляют болтовые, основной отличительной чертой которых является наличие резьбы. Подтипов таких соединений так же множество, но для примера в текущей статье будет рассмотрено то, как сделать резьбу в Компасе 3д во внутреннем и наружных исполнениях.
К решению вышепоставленной задачи можно подойти несколькими способами: ручным и программным. Отличия второго от первого состоят в первую очередь от трудоемкости процесса, а так же от наличия расширения в самой программе. В актуальных версиях программного комплекса Компас 3д существует специальная библиотека — , с помощью которой сделать резьбу не составляет никакого труда, даже лишний раз в ГОСТ заглядывать не требуется. Но не у всех она доступна. С ручным же исполнением все сложнее, но можно реализовать задуманное даже в простой учебной версии Компаса. Но обо всем по порядку.
Как сделать наружную резьбу в Компасе 3д?
Как уже отмечалось выше, сделать наружную резьбу в Компасе 3д можно различными способами.
Ручной способ создания наружной резьбы в Компасе 3д
В качестве примера будет рассмотрено нанесение наружной резьбы на цилиндр. Основной смысл этого способа заключается в том, что по поверхности цилиндра будет наноситься спираль, по траектории которой будет вырезаться сечение в виде канавки (согласно ГОСТ 24705-2004). Перечень действий по построению представлен ниже.
2. Необходимо ознакомится с п. 4.1 ГОСТ 24705-2004, чтобы по изображенному там рисунку начертить сечение (рис. 1).
Аналогично вычисляются остальные значения диаметров, необходимых для построения. Удобнее всего будет сначала построить профиль резьбы отдельным эскизом в Компасе (рис. 2). В дальнейшем его можно будет просто скопировать и использовать в работе.
4. В начале спирали на торцевой части вала (цилиндра) в плоскости, на которой она лежит, (рис. 6) создается эскиз, в который вставляется уже начерченное ранее сечение резьбы (рис. 7).
Автоматический способ создания наружной резьбы в Компасе 3д
2. Затем следует активировать вышеуказанное приложение для Компаса, после этого в панели параметров будут доступны настройки (рис. 16). После этого откроется новое окно, в котором нужно ввести свои данные (рис. 17). После закрытии этого окна, нужно выделить плоскость, из которой будет идти вал, и поставленную ранее точку. В результате получится следующий результат, как на рис. 18.
Таким образом, вариантов того, как сделать наружную резьбу в Компасе 3д, несколько. Все зависит от наличия специального приложения или времени на проектирование.
Как сделать внутреннюю резьбу в Компасе 3д?
Принцип создания внутренней резьбы аналогичен созданию внешней. Для того, чтобы выполнить внутреннюю резьбу в Компасе на примере втулки, можно воспользоваться следующими шагами.
1. Создаем втулку. Сделать это можно, создав эскиз с кольцом, а затем выдавив его в длину (рис. 19).
2. Для создания траектории, нужно активировать инструмент генерации спирали и нанести ее на внутреннюю часть втулки (рис. 20).
3. На плоскости, перпендикулярной к концу спирали, создать эскиз с резьбой (рис. 21).
Вывод
Технология для того, чтобы сделать резьбу в Компасе 3д наружной или внутренней одинакова. Лучше всего, конечно, пользоваться уже разработанными автоматическими решениями по их генерации, так как это экономит много времени, но, к сожалению, такая функция не всегда имеется в наличии в Компасе, поэтому выходом из этой ситуации будет ручной способ.
Ни для кого не секрет, что сегодняшний виртуальный мир немыслим без анимации. Напомню, что анимация — это технология, позволяющая при помощи неодушевленных неподвижных объектов создавать иллюзию движения. Для создания мультипликации, рекламы, фильмов и другого анимационного цифрового контента применяются специализированные программные продукты. Системы автоматизированного проектирования (САПР) также обладают средствами для визуализации движения механизмов, приборов, устройств, узлов машин.
В статье речь пойдет о работе с анимацией в САПР КОМПАС3D. Библиотека анимации КОМПАС3D предназначена для анализа взаимного движения компонентов и узлов механизма с наложенными связями и ограничениями на стадии разработки, а также выявление ошибок при соударении деталей. Еще одно ее предназначение — это создание интерактивных инструкций и руководств по сборкеразборке механизма, презентаций, видеороликов, а также двумерных последовательных кадров с целью подробного изучения взаимного движения компонентов и узлов механизма.
Функции и настройка
В режиме сборки при создании анимации к компонентам можно применять следующие действия:
- перемещение элемента или элементов сборки по траектории, которую можно задать с помощью 3Dсплайнов и 3Dломаных;
- вращение компонента вокруг осей;
- управление прозрачностью элемента;
- использование переменных;
- создание траектории любой точки.
Для режима перемещения и вращения в отдельном диалоге могут задаваться такие параметры, как направление, скорость, время.
Режимы анимации Перемещение и Вращение могут быть применены в сборках над деталями и подсборками. Если в сборке присутствует подсборка, то применить какоелибо действие к ее компонентам невозможно, только к самой подсборке, потому что фактически все детали этой подсборки считаются зафиксированными.
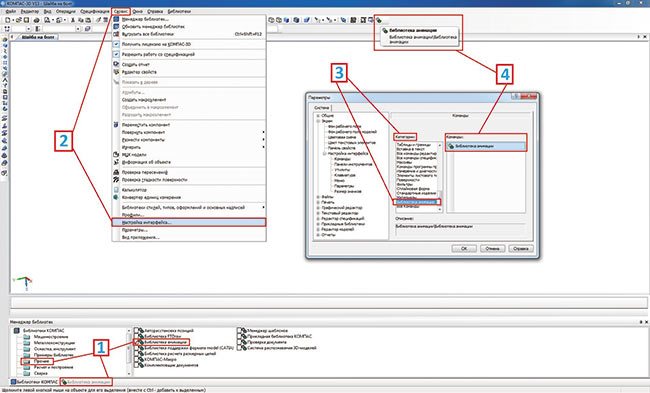
Рис. 1. Способы вызова библиотеки анимации
Пункт Настройки находится в меню Анимация (рис. 2). В этом пункте находится большое количество настроек, касающихся функций движения элементов и воспроизведения анимации: частота кадров, перестроение картинки, цикличность воспроизведения и т.д.
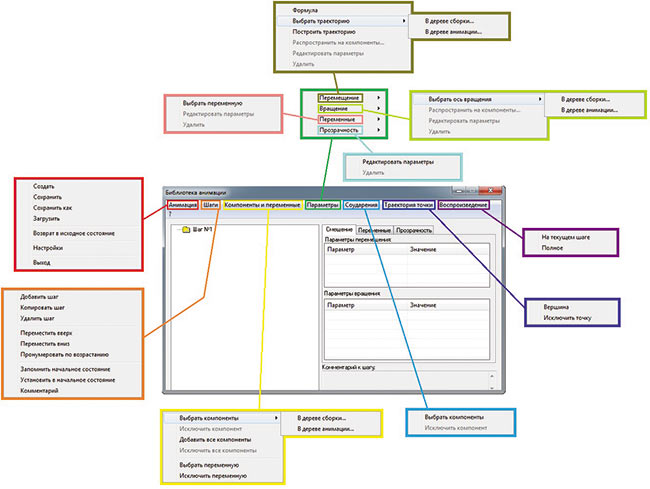
Рис. 2. Меню библиотеки анимации
Рис. 3. Дерево построения со свободным компонентом
и компонентами, лишенными всех степеней свободы
Однако это вовсе не означает, что при создании сборки пользователь должен добиваться фиксации всех элементов. Важно найти золотую середину и не перенасыщать сборку ненужными связями (если на два компонента, к примеру, одновременно наложены сопряжения Параллельность и На расстоянии, то, в дальнейшем это может привести к ошибке пересопряжения сборки). Сопряжения играют большую роль в создании анимации. Когда связи между компонентами настроены правильно, то процесс анимации протекает без ошибок.
Пункт Возврат в исходное состояние возвращает модель после очередной визуализации в исходное состояние, то есть все исключенные сопряжения включаются в расчет, тем самым возвращая компоненты в исходные точки с наложенными между ними связями. Такой маневр эффективен, потому что мы можем в любой момент остановить анимацию, если вдруг чтото пойдет не так. Вручную снова накладывать сопряжения очень долго, поэтому таким способом не только возвращается начало сценария, но и сама сборка возобновляет все связи и перестраивается в исходное положение.
Трудно показать пример анимации в статическом виде, но постараемся описать, как это должно выглядеть с точки зрения правильности настроек и последовательности написания сценария. Все анимации, рассматриваемые в данной статье, представлены на специальном интернетресурсе (ссылка в конце статьи).
Начало работы
Рассмотрим простейший пример анимации — перемещение шайбы вдоль оси болта. Перед тем как приступить к созданию сценария анимации, необходимо создать сопряжения данных элементов, а также построить траекторию перемещения шайбы.
Для данного сценария сделаем всего один шаг — Шаг 1. Создавать его из меню Шаги нет необходимости, потому что при старте диалогового окна библиотеки анимации Шаг 1 присутствует в контексте сценария по умолчанию (рис. 2).
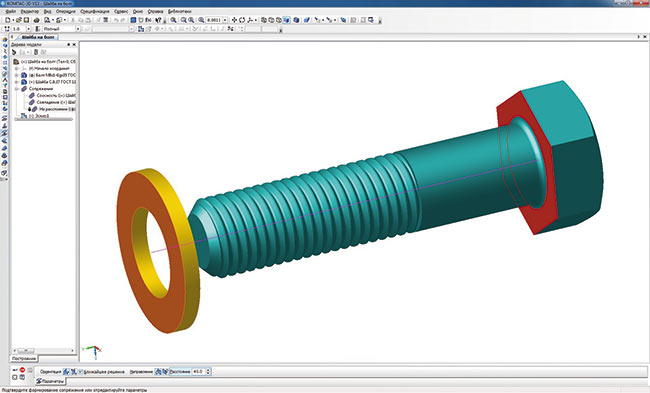
Рис. 4. Создание эскиза отрезка траектории
в контексте сборки и настройка сопряжений
Следующий этап — добавление компонента, который будет подвергаться перемещению. В меню Компоненты и переменные выбираем пункт Добавить компоненты -> В дереве сборки. Выбираем в дереве построения шайбу (элемент в окне сборки подсвечивается красным цветом) и нажимаем Ok в появившемся окошке (рис. 5). Также элемент можно выбрать в окне модели, нажав, к примеру, на любую из его граней. Шайба появляется в дереве анимации в соответствующем шаге (рис. 6).
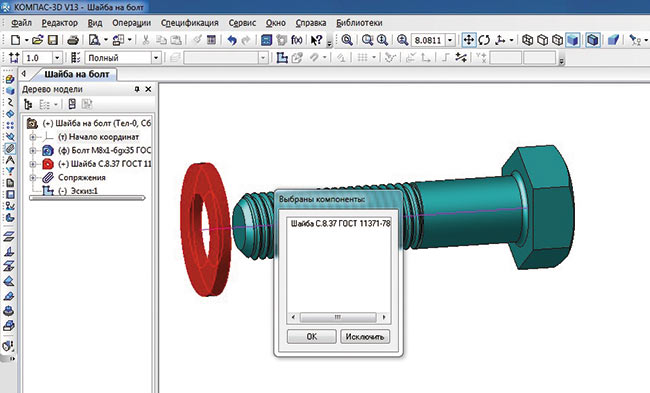
Рис. 5. Добавление компонента в сценарий анимации
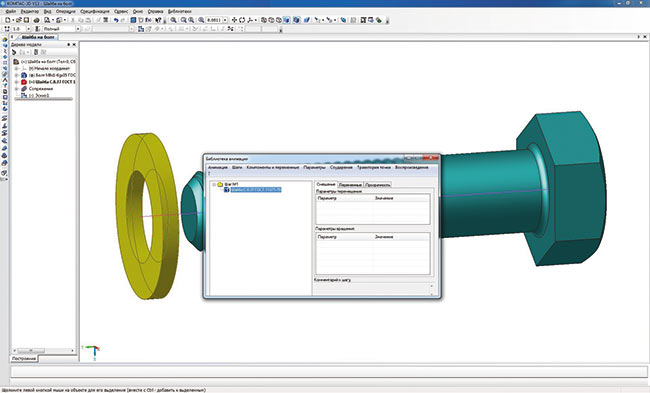
Рис. 6. Дерево анимации с выделенным в нем компонентом
Чтобы построить траекторию, необходимо выделить в дереве анимации шайбу (см. рис. 6) (в окне сборки она подсветится желтоватым цветом) и войти в меню Параметры. Выбираем пункт Добавить траекторию -> В дереве сборки и указываем в окне сборки левой клавишей мыши отрезок. В появившемся диалогом окне настраиваем направление (прямое или обратное), скорость перемещения или время, за которое шайба должна пройти данный путь (рис. 7).
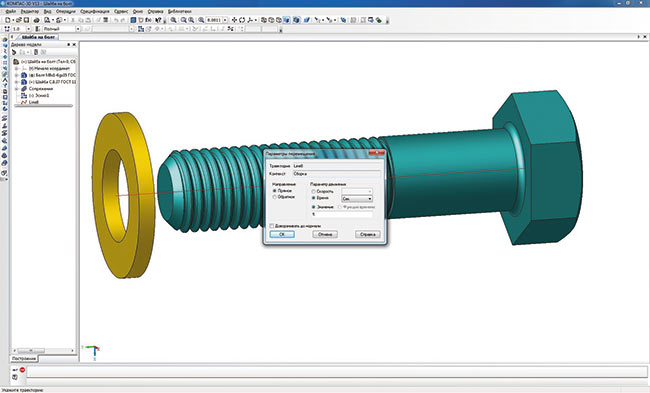
Рис. 7. Диалоговое окно параметров перемещения компонента
В дереве анимации в раскрывающемся списке Шаг 1 -> Шайба C.8.37 ГОСТ 1137178 появляется пиктограмма траектории, одновременно с этим в дереве построения сборки появляется 3Dсплайн. При создании сценария анимации сопряжения элементов, участвующие в визуализации и перемещении в пространстве, следует исключить из дерева построения. Это можно сделать не выходя из диалога сценария анимации (рис. 8).
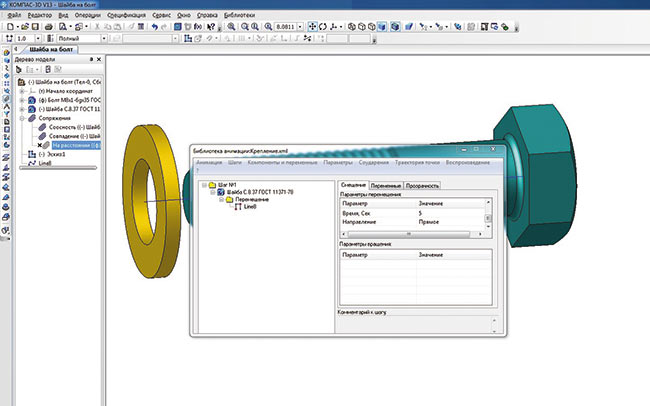
Рис. 8. Дерево сценария анимации и отключение сопряжений в дереве построения сборки
Как уже упоминалось ранее, в этом примере можно описать функцию соударения компонентов при движении. Для этого в меню Соударения выбираем пункт Выбрать компоненты и в дереве построения или окне сборки указываем шайбу и болт (рис. 9). В меню Анимация -> Настройки необходимо включить опцию Останавливать при соударении. После запуска анимации, как только шайба коснется шляпки болта, сборка выделяется красным цветом и анимация останавливается, что указывает на соударение компонентов (рис. 10). Это частный случай, когда специально было сделано преднамеренное превышение пути перемещения. В реальности такая функция носит более значимый характер — она служит для выявления коллизий при взаимном движении узлов и деталей в механизмах машин.
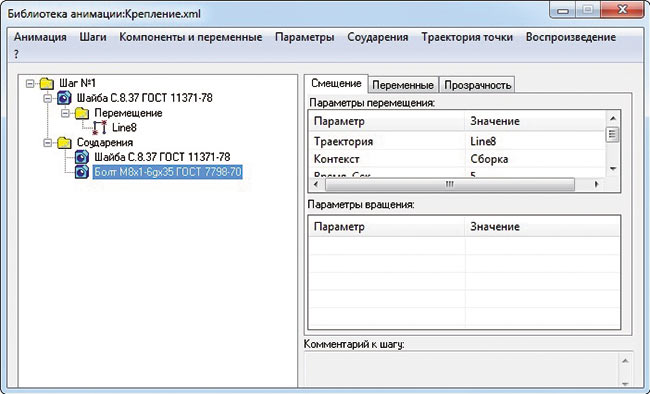
Рис. 9. Дерево анимации с добавлением функции соударения компонентов
Воспроизведение анимации
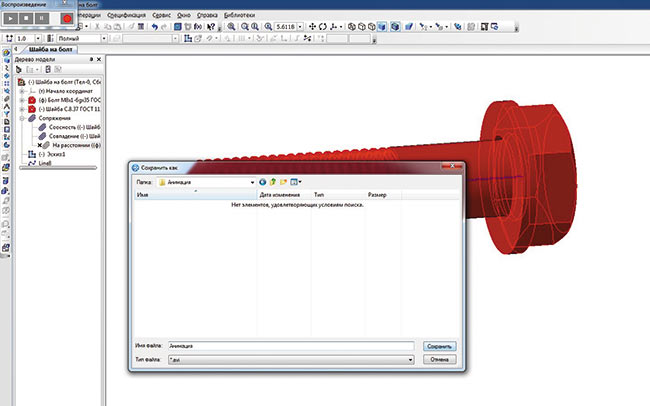
Рис. 10. Соударение компонентов в режиме анимации и панель управления воспроизведения анимации с сохранением видеофайла
Эффект вращения
На примере коленчатого вала двигателя попробуем рассмотреть эффект вращения. В реальности поршни приводят вал в движение, но для данного примера лучше переделать принцип работы механизма двигателя. Здесь вращательное движение вала будет приводить в поступательное движение шатуны с поршнями, которые перемещаются в осевом направлении по гильзам цилиндров. Правильное сопряжение всех деталей и подсборок исключает возможность появления ошибок при перестроении. Для наглядности процесса скроем главную зафиксированную деталь — блок цилиндров. В случае если элемент скрыт, в отличие от его исключения из расчета, все связи остаются активными. Для того чтобы сделать поршни видимыми и улучшить отображение процесса, разрежем гильзы цилиндров пополам секущей плоскостью в режиме деталировки.
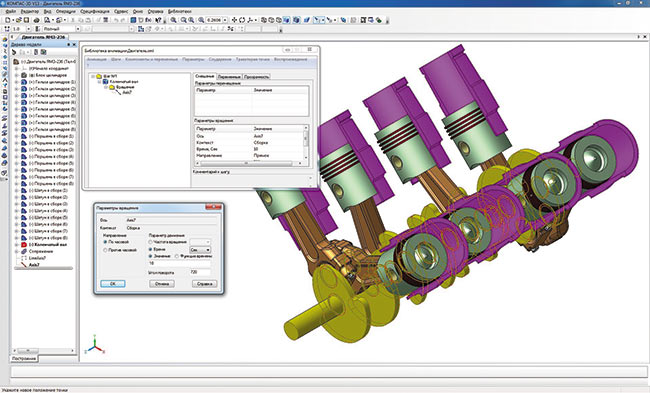
Рис. 11. Параметры вращения и дерево анимации
Поскольку поршни сопряжены с гильзами соосно, поршни сопряжены тем же образом с шатунами с помощью поршневых пальцев, а гильзы зафиксированы относительно блока цилиндров, при вращении вала каждый шатун будет проворачиваться на соответствующий угол, а поршень совершать поступательные движения по гильзе цилиндров. При анимации, когда элементы изменяют свое местоположение относительно начального положения, в дереве построения сборки пиктограммы соответствующих деталей и подсборок приобретают значок в виде красной галочки (рис. 12).
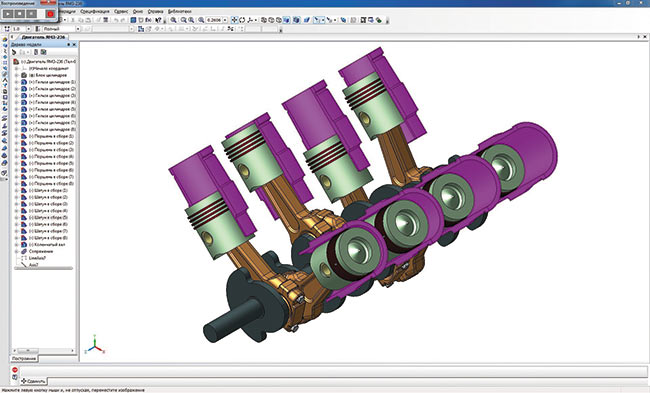
Рис. 12. Анимация вращения коленчатого вала
Сопряжения механической связи
В функционале КОМПАС3D помимо позиционирующих сопряжений присутствуют сопряжения механической связи: вращение — вращение, вращение — перемещение, кулачок — толкатель. Перемещение компонентов между собой происходит с учетом ограничений, налагаемых позиционирующими сопряжениями. Данные сопряжения позволяют немного увеличить потенциал операций вращения и перемещения при создании анимации. Чтобы понять суть сопряжений механических связей, рассмотрим несколько частных примеров.
Рис. 14. Анимация зацепления зубчатой конической передачи
На рис. 16 показано, как при возвратнопоступательном движении зубчатой рейки происходит поворот вращающегося захвата.
Для построения траектории перемещения необходимо в дереве анимации выделить рейку и воспользоваться командой Перемещение -> Построить траекторию из меню Параметры. Затем в появившемся окошке Построение нужно нажать кнопку Считать положение (так система запомнит начальное положение рейки), а потом ручным перемещением компонента в контексте сборки переместить рейку в конечное положение и снова нажать кнопку Считать положение. После, по нажатии кнопки Завершить, в дереве анимации и дереве построения автоматически появится траектория в виде 3Dломаной (рис. 17).

Рис. 17. Построение траектории перемещения компонента в контексте сборки
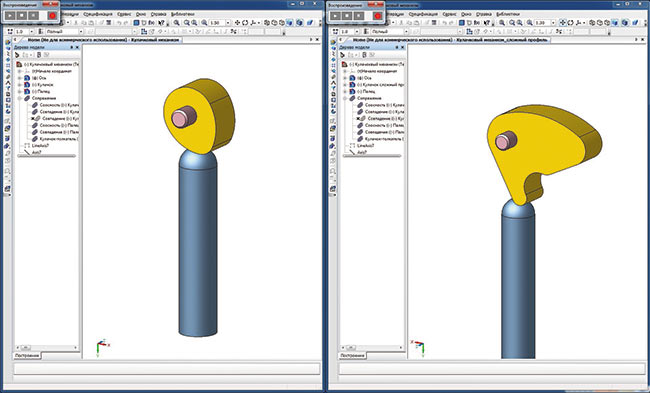
Рис. 18. Анимация кулачковых механизмов с кулачками разных профилей
Настройка взаимодействия сводится к выбору рабочих граней и оси вращения кулачка. Также в окне сборки или дереве построения необходимо указать толкатель и задать направление или вектор, вдоль которого он будет перемещаться (рис. 19).
В зависимости от профиля кулачка и формы толкателя анимация кулачкового механизма позволяет выявить заклинивание механизма.
На каждом шаге можно совмещать принципы движения, например перемещение — перемещение, перемещение — вращение, в зависимости от того, что требуется изобразить. Рассмотрим несколько частных примеров взаимодействия движений компонентов.
Взаимодействие движений компонентов
Совместное движение одного компонента относительно другого можно рассмотреть на примере имитации сборкиразборки болтового соединения двух пластин.
В анимации присутствует болт, две скрепляемые пластины, шайба обычная, шайба стопорная и гайка. В сборке зафиксируем болт, а остальные элементы сопряжем с ним соответствующими связями. Проделаем следующую последовательность: свинчивание гайки и снятие ее, снятие шайбы стопорной, снятие шайбы обычной, снятие одной пластины, а затем и другой. Все компоненты по мере снятия будут исчезать с помощью функции прозрачности компонента. После этого соберем всю сборку в обратном порядке. Для сценария разборки нам потребуется минимум шесть шагов. По умолчанию Шаг 1 уже присутствует в дереве сценария, поэтому необходимо добавить еще пять шагов через пункт Добавить шаг в меню Шаги (рис. 20). С шагами можно делать различные операции — их можно перемещать друг относительно друга по дереву вверх и вниз, менять нумерацию следования, копировать, удалять и т.д.
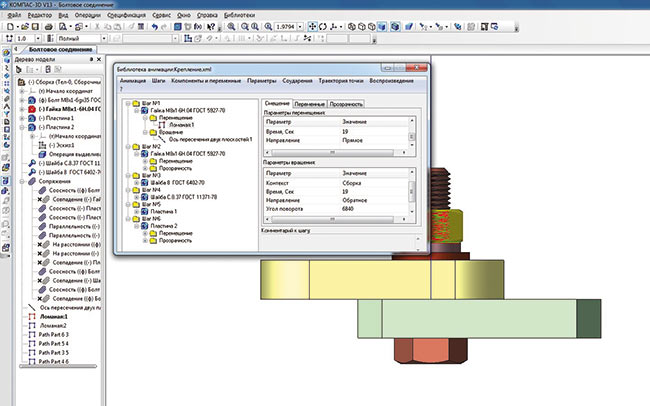
Рис. 20. Добавление шагов в сценарий анимации
На первом этапе надо скрутить гайку, для чего необходимо добавить ее в Шаг 1, предварительно выделив его левой клавишей мыши. Также в каждый последующий шаг добавляем по одному элементу в том порядке, в каком они должны сниматься с зафиксированного болта. Поскольку болт имеет резьбу (кинематический вырез эскиза вдоль кривой — спирали), то помимо вращения гайка должна еще и перемещаться. Остальные элементы будут только перемещаться.
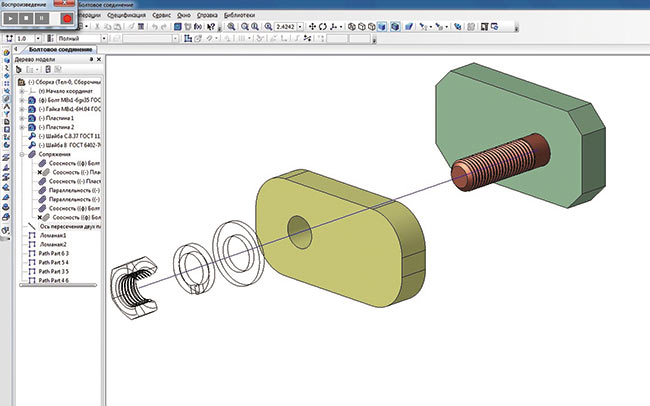
Рис. 21. Некорректное отображение исчезнувших компонентов
Для того чтобы компонент исчезал не в процессе движения, а после снятия с болта, прозрачность компонента необходимо выносить для каждого элемента отдельным шагом, следующим после шага перемещения.
В данном примере был рассмотрен случай совместного движения одного компонента в одном шаге. Другой вариант — это когда разные по назначению компоненты совершают перемещения в одном шаге. Яркий тому пример — движение любого автотранспорта осуществляется линейно по какойто траектории, одновременно с этим у автомобиля должны вращаться колеса.
Перемещение разных компонентов на одном шаге
Анимацию движения автомобиля рассмотрим на примере движения троллейбуса по дороге (пример взят из тематического задания командного зачета олимпиады CADOLYMP 2013). Важным замечанием в данной визуализации будет то, что колеса должны быть добавлены в головную сборку отдельно от самой сборки троллейбуса. Процесс анимации из подсборки будет рассмотрен позднее, во второй части статьи, потому что анимация движения деталей и механизмов в подсборках возможна только при использовании переменных.
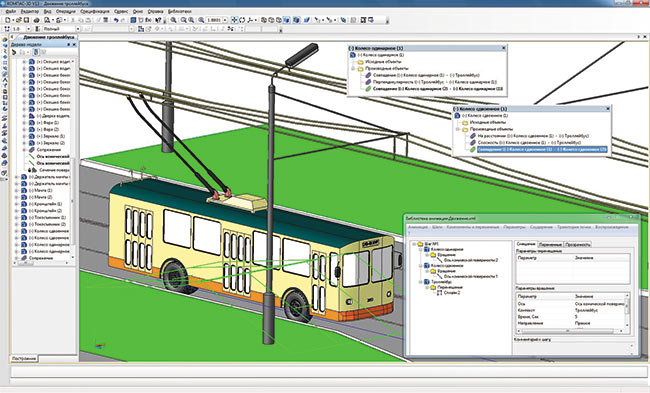
Рис. 22. Процесс создания сценария анимации движения троллейбуса
Траектория точки
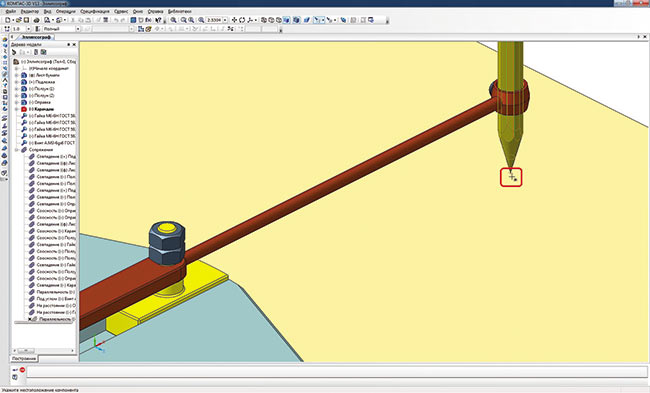
Рис. 23. Вершина конуса карандаша в ловушке курсора
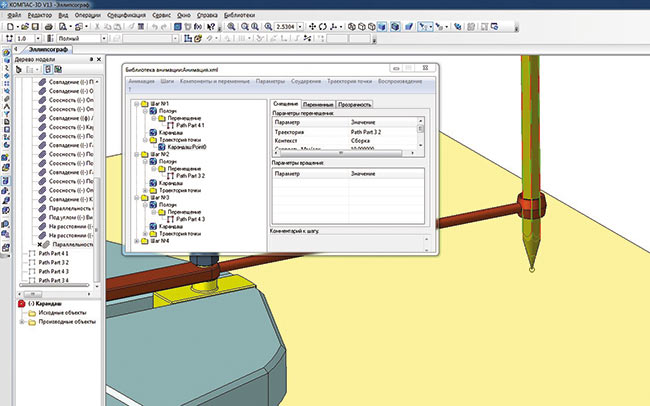
Рис. 24. Дерево анимации с настроенными параметрами
Кнопка Создать объект добавляет в ветку дерева анимации соответствующее свойство компонента. Аналогично создаются остальные три шага, каждый из которых описывает крайние положения ползунов и запоминает траектории точек (рис. 24).
Анимация показывает процесс рисования эллипса в виде 3Dтраектории, которая автоматически строится в дереве построения сборки. Эту траекторию можно потом редактировать стандартными средствами КОМПАС3D. По умолчанию в меню Скрыть все элементы в сборке должна быть открыта опция Пространственные кривые, иначе построение не будет видно на экране (рис. 25).
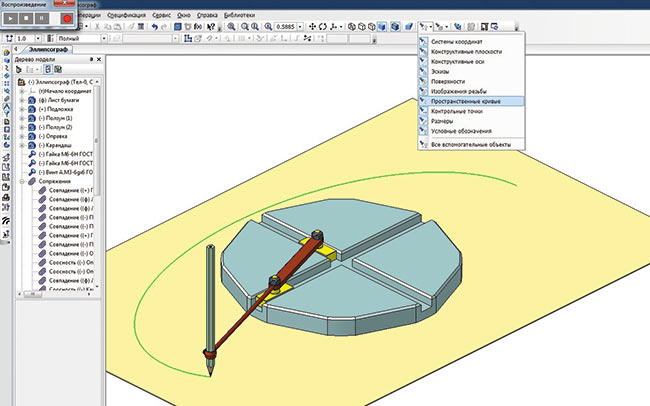
Рис. 25. Анимация рисования эллипса
Кинограммы
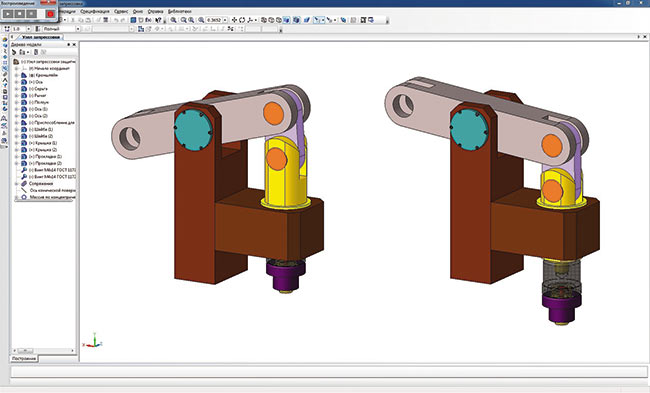
Рис. 26. Анимация узла запрессовки защитной разрезной шайбы
В меню Анимация -> Настройки необходимо включить опцию Кинограмма, задать ориентацию виду и выбрать количество кадров в секунду. Анимация механизма покадрово записывается в папку Кинограмма в отдельные файлы в виде КОМПАСФрагмент (рис. 27).
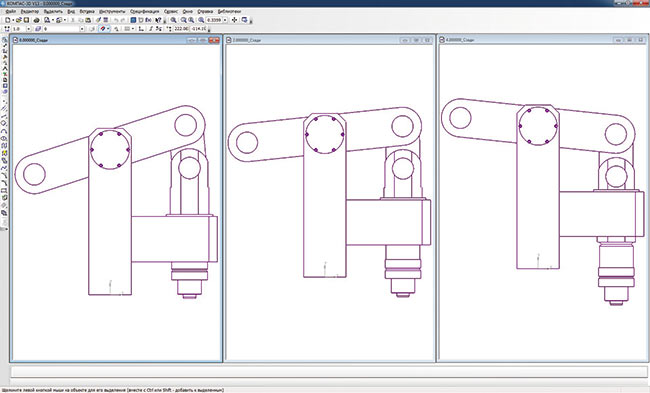
Рис. 27. Кинограмма механизма
В следующей части статьи планируется рассмотреть анимацию, затрагивающую работу в подсборках, где требуется использование параметризации объектов и ввод внешних переменных.
Создание деталей в КОМПАС не составит для Вас труда, если Вы хорошо ориентируетесь в функционале КОМПАС-График. Основа трехмерного проектирования — создание эскизов, перемещение которых в пространстве и позволяет получить объемные тела. Эскиз можно сравнить с фрагментом, для его построения используются команды построения геометрических примитивов: отрезков, окружностей, прямоугольников и др.
Если же говорить про способы создания детали, то их не так уж и много. Существует 4 формообразующие операции:
- выдавливания;
- вращения;
- по траектории;
- по сечениям.
Правда, существуют и другие способы построения, но они встречаются намного реже. Например, гибридное моделирование, работа с листовым телом, булевы операции.
Получается любая деталь состоит из простейших объемов, каждый из которых выполнен одной из 4-х формообразующих операций.
С чего начать создание детали
Каждая деталь состоит из последовательности формообразующих операций, формообразующие операции в свою очередь работают на базе эскизов. Первым делом стоит определиться на какие простейшие объемы можно разбить деталь, чтобы каждый из объемов выполнить в отдельной операции и в совокупности получить единую деталь.
Пошаговая инструкция построения детали
Разберем небольшой пример. Нам нужно создать деталь Упор. Конечная модель представлена на скриншоте:

За одну операцию данную деталь не построить, поэтому нужно проанализировать геометрию и определиться на какие части будет поделено тело. Не важно получится у Вас 3 части или 10, Вы должны только определиться: как сделать деталь быстрее и проще. Например, можно у детали Упор построить основание сразу с четырьмя крепежными отверстиями, а можно вначале операцией выдавливания выдавить прямоугольник, а отверстия добавить в следующей операции. Оба варианта будут правильными, главное выбрать удобный и понятный именно Вам.
- операция выдавливания основания;
- операция построения на основании усеченного конуса;
- операция вычитания четырех сквозных отверстий;
- операция вычитания глухого отверстия.
С последовательностью определились, следующий шаг выбрать плоскость для построения первого эскиза и направление выполнения операции. Плоскость и направление повлияют на последующее отображение данной модели в ассоциативных видах чертежа.
Если выбрать в качестве базовой плоскости для основания системную плоскость ZX, то вид Спереди будет выглядеть вот так:

Если же исходной плоскостью будет плоскость XY, то вид Спереди будет выглядеть вот так:

Ничего страшного в таком представлении нет, просто понадобятся дополнительные действия, чтобы ассоциативный чертеж соответствовал представлению конструктора о расположении видов.
Для правильного построения советуем изначально в пустом файле Детали выбрать нужную ориентацию на Панели быстрого доступа и после этого приступать к построению.

В нашем случае, если в качестве основания принимается прямоугольная бобышка, удобнее всего выбрать вид Сверху и выполнить построение первого эскиза на плоскости ZX.
Эскизы можно строить на плоскостях и плоских гранях. В нашем случае для построения первого эскиза используется системная плоскость ZX. Строить её не нужно, в новой детали системные плоскости: ZX, ZY, XY присутствуют по умолчанию.
Для создания эскиза выбираем плоскость ZX. Сделать это можно либо кликнув по плоскости в окне модели:

Либо указав её в Дереве модели:


Либо с контекстного меню, которое появляется при нажатии правой кнопкой мыши на плоскости

Или с контекстной панели, которая появляется при выделении плоскости

После запуска команды, выбранная плоскость разворачивается в плоскость экрана и доступными становятся команды построения геометрических примитивов. Работу в эскизе можно сравнить с работой во фрагменте или чертеже КОМПАС-График.



После вызова команды необходимо первым кликом указать центр прямоугольника, а вторым указать одну из вершин. Прямоугольник построим произвольных размеров, необходимые значения по горизонтали и вертикали зададим позже проставив управляющие размеры.


При простановке авторазмера достаточно кликнуть на одном из вертикальных отрезков и в месте расположения размерной надписи, а затем по одному из горизонтальных отрезков и также в месте расположения его размерной надписи.
После простановки размера появляется окно:

В данном окне необходимо ввести значение размера. В нашем случае это 160 у горизонтального размера и 100 у вертикального.


Эскиз готов, 4 сквозных отверстия мы выполним позже, поэтому на данном эскизе их изображать необходимости нет. Если же мы решили бы выполнить отверстия в этой же операции, то нужно было бы построить следующий эскиз:

Выполнив построения в эскизе можно сразу перейти к формообразующей операции. В нашем случае — это операция выдавливания:



Основание построено, для последующих эскизов можно использовать плоские грани основания. Способов создавать эскизы и операции несколько, в текущем примере мы рассмотрим один, чтобы не перегружать статью.



После построения окружности ставим к ней авторазмер и задаем его значение = 70.


Следующий шаг — добавить на деталь отверстия и скругления. Начнем с отверстий. Выделим верхнюю грань основания и создадим новый эскиз. Способы вызова команды рассматривали ранее, поэтому останавливаться подробнее на этом не будем.

После построения окружности ставим к ней авторазмер и задаем его значение = 15.
Также ставим 2 размера от начала координат — один вертикальный, другой горизонтальный. Значение вертикального размер 35, горизонтального 65.


Строим 2 отрезка произвольной длины — один вертикальный, второй горизонтальный. Точка привязки начальной точки отрезков — начало координат.


Укажем одну из построенных осей. В итоге произойдет симметричное копирование и эскиз будет выглядеть вот так:




В итоге получим деталь с четырьмя отверстиями

На верхней гране усеченного конуса создаем эскиз



Деталь должна выглядеть следующим образом:

Осталось указать на детали скругления и фаски.

Задаем на Панели параметров радиус скругления. В нашем случае у вертикальных ребер основания радиус равен 10 мм. Кликаем по всем четырем ребрам, в итоге получаем вот такое изображение:






внешнего контура. В развернувшемся меню выберите команду Шлицы . Откроется до!
полнительное меню с различными типами шлицев. Щелчком мыши укажите тип Шлицы
треугольные . На экране появится окно, предназначенное для ввода параметров шлицев
2. Нажмите на панели инструментов кнопку Перестроить , чтобы увидеть результаты пос!
3. После ввода параметров нажмите на панели инструментов кнопку OK .
Вы можете рассчитать на прочность и износостойкость шлицы, которые являются эле!
ментом модели КОМПАС SHAFT 2D. Расчет выполняется посредством специализирован!
ного модуля, являющегося частью системы КОМПАС SHAFT 2D.
Расчету подлежат только шлицы, передающие крутящий момент от элемента механичес!
По результатам расчета формируется отчет в формате FastReport. Готовый отчет может
быть распечатан, отредактирован, сохранен в файле формата frf.
Вы можете вызвать модуль расчета шлицевого соединения из окон, в которых задаются
параметры шлицев, при помощи кнопки с изображением калькулятора.
После загрузки модуля на экране появится окно Расчет шлицевого соединения
Чтобы приступить к вводу исходных данных, нажмите кнопку Проверочный расчет .
1. Если элемент механической передачи, нагружающий шлицы, сделан заодно с валом, в
списке параметров для расчета будут указаны характеристики зубчатого зацепления:
При расчете шлицев берется нагрузка от зубчатого колеса с внешними зубьями, распо!
ложенного ближе к правому краю модели КОМПАС SHAFT 2D.
2. Выберите схему расположения зубчатого венца. Для этого нажмите кнопку с изображе!
нием книги, введите в открывшемся окне номер нужного варианта (рис. 4.23) и нажмите
Интегрированная система проектирования тел вращения КОМПАС SHAFT 2D
Запуск проверочного расчета шлицев с указанными параметрами.
Вывод на экран результатов расчета в виде отчета, выполненного в
FastReport. Из окна отчета возможен вывод результатов на
▼ Коэффициент, учитывающий условия осевого закрепления ступицы зубчатого колеса на
Марка материала, из которого изготовлены шлицы, и его характеристики считываются
из списка параметров модели КОМПАС SHAFT 2D. Если данные параметры отсутствуют,
Базовый ресурс можно вводить в часах или в циклах. Укажите единицу измерения, вы!
После ввода данных нажмите на панели инструментов кнопку Расчет .
При отсутствии значения какой!либо запрашиваемой величины расчет выполняться не
будет. В этом случае потребуется ввести недостающие данные и вновь запустить расчет.
Если введенных данных достаточно для расчета, на экране появится окно Отчет . Оно
предназначено для просмотра и редактирования отчета, сформированного в результате
Управление отчетом осуществляется при помощи кнопок, вынесенных на панель инстру!
После выбора этой кнопки или двойного щелчка мышью в поле
отчета текущая страница готового отчета будет открыта в
Используя общие правила работы с Дизайнером отчетов,
Сохранение готового отчета в файле формата frp (FastReport).
диалога Windows. В этом окне выберите формат, укажите имя
Открытие файла формата frp, содержащего отчет FastReport.
стандартного диалога Windows. Укажите файл с отчетом и
Интегрированная система проектирования тел вращения КОМПАС SHAFT 2D
Отображение страницы отчета во всю высоту окна просмотра.
Отображение страницы отчета во всю ширину окна просмотра.
Отображение страницы отчета в окне просмотра в масштабе
Масштаб можно ввести при помощи клавиатуры или выбрать из
На цилиндрической ступени внешнего контура модели КОМПАС SHAFT 2D могут быть
Выделите в дереве ступеней и элементов цилиндрическую ступень внешнего контура и
нажмите кнопку Дополнительные элементы ступеней на инструментальной панели
внешнего контура. В развернувшемся меню выберите команду Шпоночные пазы . От!
кроется дополнительное меню с различными типами пазов. Щелчком мыши укажите тип
паза Под призматическую шпонку ГОСТ 23360 78 . На экране появится окно, пред!
назначенное для ввода параметров шпонки и шпоночного паза (рис. 4.25).
Для шпоночного паза под призматическую шпонку можно построить дополнительный
Выделите в дереве ступеней и элементов внешнего контура дополнительный элемент
Шпоночный паз под призматическую шпонку и нажмите кнопку Дополнительные
элементы ступеней на инструментальной панели внешнего контура. В раскрывшемся
меню выберите строку Профиль шпоночного паза и щелкните мышью. На экране по!
явится окно Профиль шпоночного паза на валу (рис. 4.26).
Интегрированная система проектирования тел вращения КОМПАС SHAFT 2D
Выделите в дереве ступеней и элементов цилиндрическую ступень внешнего контура и
нажмите кнопку Дополнительные элементы ступеней на инструментальной панели
внешнего контура. В развернувшемся меню выберите команду Шпоночные пазы . От!
кроется дополнительное меню с различными типами пазов. Щелчком мыши укажите тип
паза Под призматическую высокую шпонку ГОСТ 10748 79 . На экране появится ок!
но, предназначенное для ввода параметров шпонки и шпоночного паза (рис. 4.27).
Для шпоночного паза под призматическую высокую шпонку можно построить дополни!
тельный элемент Профиль шпоночного паза . Это делается так же, как для шпоночно!
го паза под призматическую шпонку (см. раздел «Профиль шпоночного паза под при!
Шпоночный паз под сегментную шпонку (передача крутящего момента)
Выделите в дереве ступеней и элементов цилиндрическую ступень внешнего контура и
нажмите кнопку Дополнительные элементы ступеней на инструментальной панели
внешнего контура. В развернувшемся меню выберите команду Шпоночные пазы . От!
кроется дополнительное меню с различными типами пазов. Щелчком мыши укажите тип
паза Под сегментную шпонку ГОСТ 24071 97 (передача крутящего момента) . На
экране появится окно, предназначенное для ввода параметров шпонки и шпоночного па!
1. Задайте требуемые характеристики. Порядок их ввода аналогичен порядку определения
параметров шпоночного паза под призматическую шпонку (см. раздел «Шпоночный паз
Шпоночный паз под сегментную шпонку (фиксация элементов)
Выделите в дереве ступеней и элементов цилиндрическую ступень внешнего контура и
нажмите кнопку Дополнительные элементы ступеней на инструментальной панели
внешнего контура. В развернувшемся меню выберите команду Шпоночные пазы . От!
кроется дополнительное меню с различными типами пазов. Щелчком мыши укажите тип
паза Под сегментную шпонку ГОСТ 24071 97 (фиксация элементов) . На экране по!
явится окно, предназначенное для ввода параметров шпонки и шпоночного паза
Для шпоночного паза под сегментную шпонку можно построить дополнительный эле!
мент Профиль шпоночного паза . Это делается так же, как для шпоночного паза под
призматическую шпонку (см. раздел «Профиль шпоночного паза под призматическую
Интегрированная система проектирования тел вращения КОМПАС SHAFT 2D
Выделите в дереве ступеней и элементов цилиндрическую ступень внешнего контура и
нажмите кнопку Дополнительные элементы ступеней на инструментальной панели
внешнего контура. В развернувшемся меню дополнительных элементов выберите ко!
манду Подшипники . Из раскрывшего списка вновь выберите строку Подшипники . На
экране появится одноименное команде окно. Оно содержит две вкладки:
Например, раздел классификатора подшипников Подшипники роликовые включает в
себя ряд стандартов, каждый из которых содержит несколько типов подшипников.
1. Укажите в классификаторе ГОСТ и тип подшипника. В области Изображение появится
соответствующая иллюстрация. Ниже будет приведено наименование подшипника.
2. В области Вариант привязки выберите способ привязки подшипника к валу. Для этого
щелкните по слайду правой (или два раза левой) клавишей мыши. На экране появится
развернутое меню вариантов привязки (рис. 4.31). Перемещая курсор, выберите нужный
3. Вы можете подобрать для модели подшипники с внутренним диа!
метром, превышающим диаметр активной ступени. Для этого от!
4. Задайте Расстояние от базового торца ступени до точки привязки
5. Определите способ отрисовки подшипника на чертеже. Для этого
выберите один из вариантов в группе Вариант отрисовки .
Включите опцию Зеркальная , чтобы получить зеркальное изображение подшипника.
При включении или выключении этой опции происходит смена иллюстрации в области
Чтобы выбрать конкретный подшипник указанного типа, раскройте вкладку Выбор
подшипника (рис. 4.32) и укажите подшипник, который должен быть установлен на ак!
Читайте также: