
Тросовый манипулятор своими руками
Добавил пользователь Валентин П. Обновлено: 04.10.2024
Появление манипуляторов стало настоящим революционным событием. Ведь именно благодаря такому оборудованию производительность лесозаготовительных работ увеличилась в разы. На сегодняшний день есть 3 вида таких устройств:
- трелевочные;
- для валочных работ;
- для погрузки древесины.
Самыми распространенными являются именно погрузочные манипуляторы, которые могут устанавливаться не только на тракторную технику, но и на лесовозные и лесные машины.
Как сделать навесной самодельный кран на трактор?
Имея нужный набор инструментов и деталей можно сконструировать кран на заднюю навеску трактора своими руками. Обязательно учтите тот момент, что вам нужен четкий расчет всех запчастей. Поскольку при перезагрузке на механизм трактор может элементарно стать на дыбы.
Нужные материалы:
- сварка;
- болгарка или газовый резак;
- разводные ключи, кувалда, молоток и прочие элементарные инструменты.
- 3 гидравлических цилиндра: 1-й – для подъема стрелы с ковшом и 2 остальных для изменения угла наклона ковша;
- металлические профили и пластины;
- цилиндрические шарнирные соединения.
Главное – это чертеж, его нужно подготовить в первую очередь. А теперь давайте поэтапно:
- Изготавливаем каркас. Он должен быть прямоугольной формы, низ которой выходит за грани. По центру также должен находится еще один прямоугольный каркас, который состоит из 2-х пластин, приваренных к верхней и нижней грани. К нему же снизу будет крепиться большой гидравлический цилиндр. Сверху к задней части крепится распорка, которая будет удерживать весь механизм. На верхней грани должны находится 4 шарнирных соединения (2 по центру и 2 по краям).
- Делаем стрелу. Со стороны основной части крепления на уровне 30º устанавливаем стрелу. В итоге конструкция должна выглядеть в форме бумеранга. А именно 2 изогнутых профиля должны быть соединены между собой на концах и по центру. Ближе к центру привариваем каркас, на который будет крепиться 2-й конец главного цилиндра.
- Под видом шарнирного цилиндрического соединения делаем центральную часть стрелы. Суть конструкции такова: 2 колена в изломе в 40º, на которых с одной стороны крепим 2 малых цилиндра, а с другой – перекладину для последующего соединения. Все соединяется на шарнирах, а колена имеют 1 общий шарнир.
- Теперь нам нужен ковш. Его либо нужно сделать самому, либо приобрести готовый. Удачным вариантом для его замены будет вилочный погрузчик для тюков или поддонов.
- Если стрела имеет вынос больше 2 м, тогда нужно наварить на раму корзину для дополнительных утяжелителей (песка, металлических грузов, бетонных блоков).
Вот такая вот схема работы поможет вам сэкономить свои средства и дополнительно оборудовать свой трактор полезным навесным устройством.

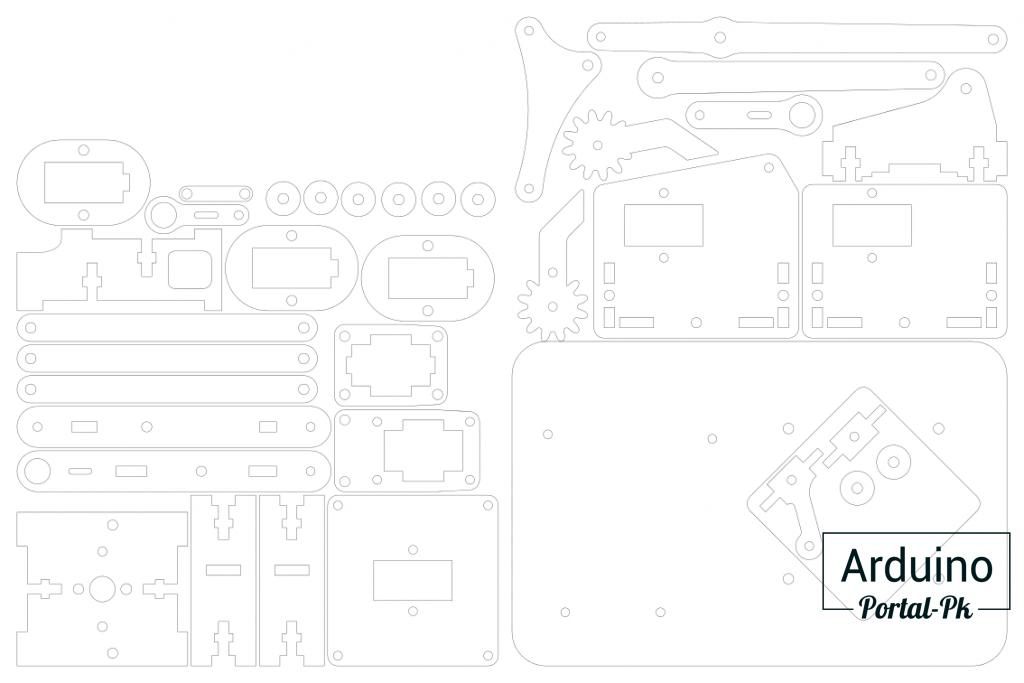
Я думал что с первого раза у меня ни чего не получиться. Так как это достаточно сложная работа для ЧПУ и очень много мелких деталей.
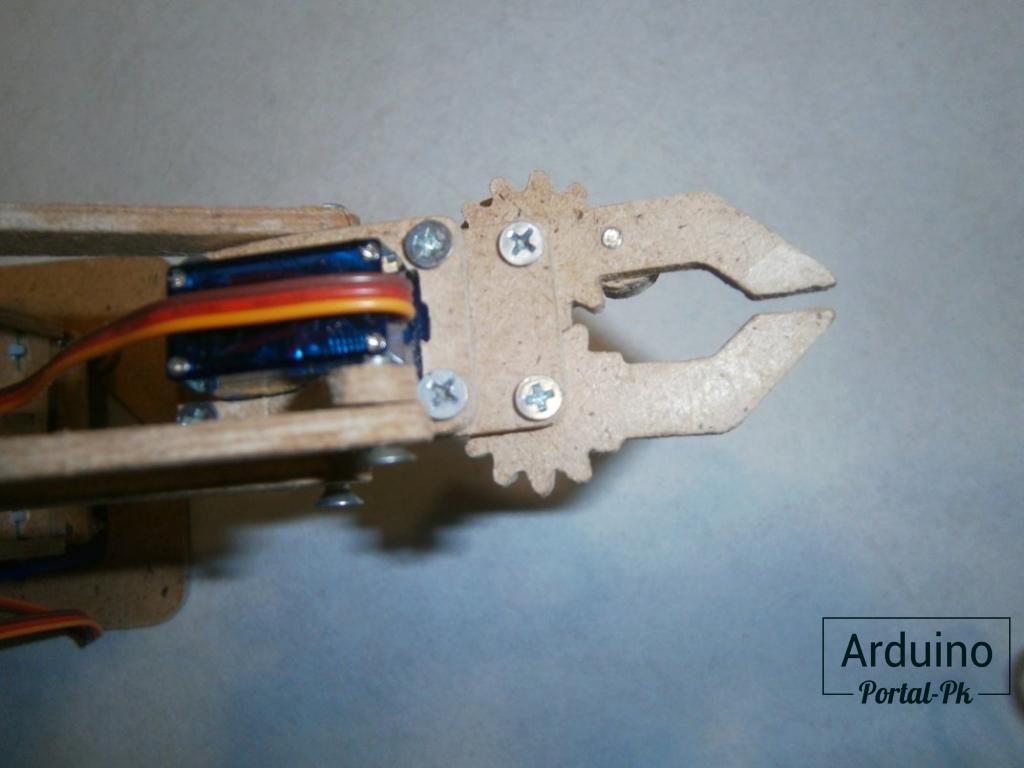
ЧПУ резал больше часа и вырезал все детали. Провел небольшую доработку с помощью надфиля. Собрал на винтики манипулятор. Кстати в интернете много инструкций, от текстовых до видео по сборке манипулятора.
И Вот что у меня получилось. Достаточно не плохо на мой взгляд.
Серо-приводы установлены, Манипулятор собран. Но как проверить его работоспособность. Поискал в интернете примеров не дал результатов и тогда я решил набросать небольшой пример кода для NodeMCU. Тем более у меня лежал без дела шилд для данной отладочной платы.
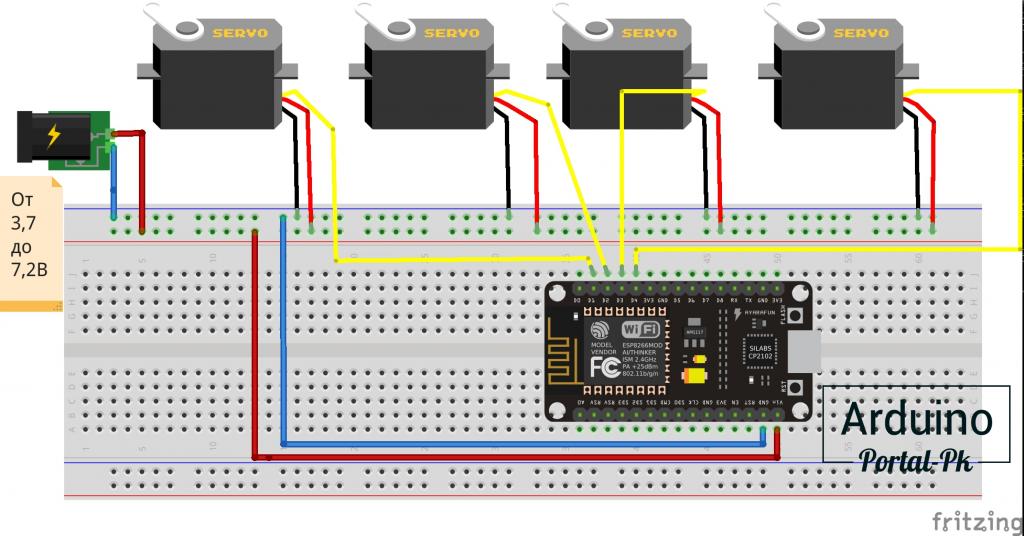
Код получился не очень красивый но для проверки достаточно.
Вам скорее всего нужно будет изменить начальные угол для серо-приводов.
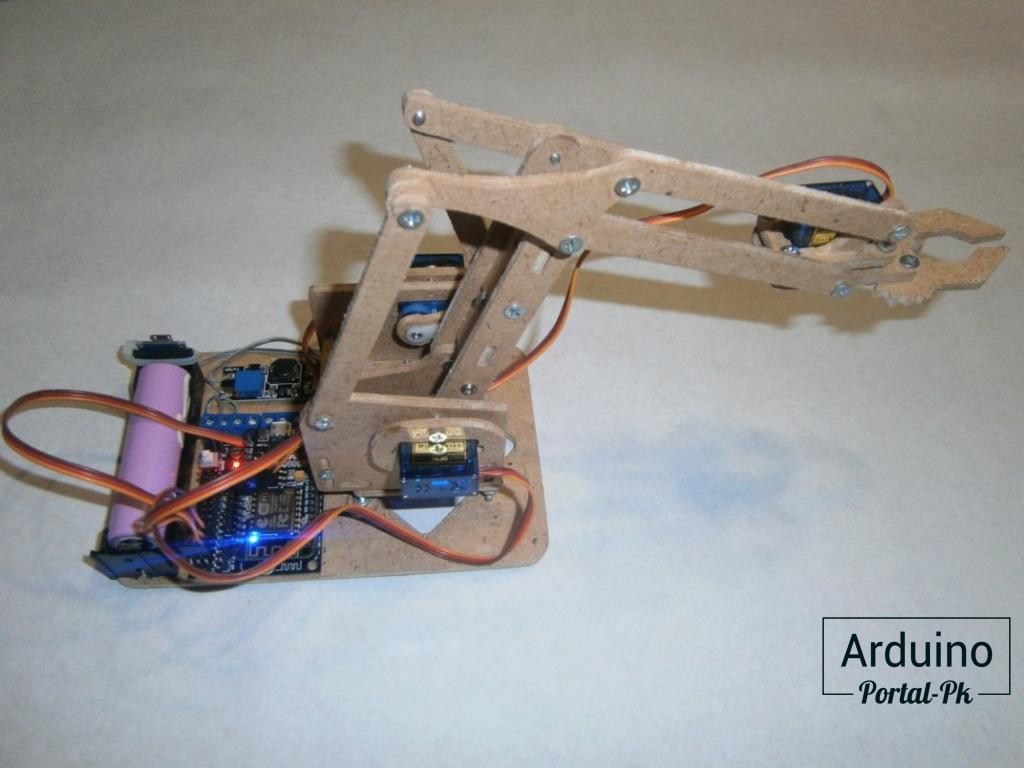
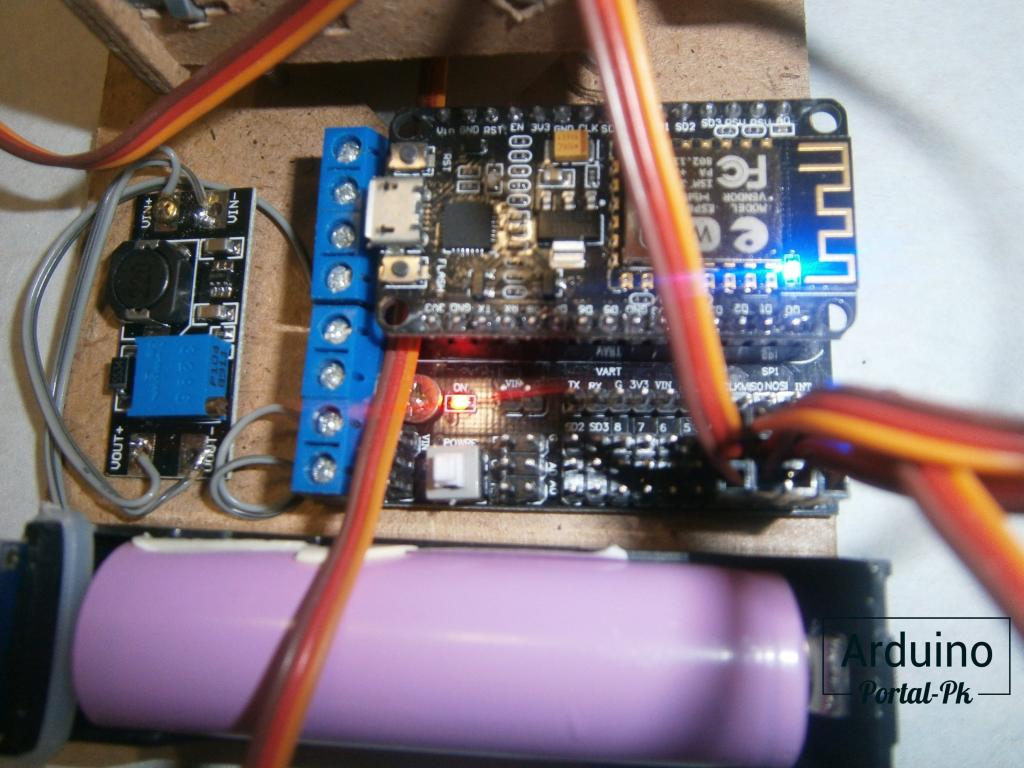
Тестирования самодельного манипулятора показал , что все работает но скорее всего не достаточно питания от одного аккумулятора 18650. И происходить перезагрузка NodeMCU .
Запланировал доработку кода для руки-манипулятора и переделать источник питания. Но как скоро будет продолжение зависит от вас и от свободного времени.
Сегодня канал The Q поделится секретом того, как самостоятельно изготовить из подручных приспособлений миниатюрный, но весьма надежный манипулятор из подручных средств.

Наверное, каждый хоть раз в жизни мечтал о собственной робо-руке. Но если у вас не хватает денег на футуристические гаджеты, всегда можно исполнить свою мечту самостоятельно. Преимущество гидравлических механизмов заключается в их легкости, доступности материалов и простоте изготовления. Все, что вам понадобится — это не сколько медицинских шприцов без игл, набор резиновых трубок и плотный картон или пластик, из которого будет выполнен корпус манипулятора. Управление системой происходит с помощью регулировки уровня жидкости шприцевыми поршнями, что обеспечивает игрушке подвижность и гибкость:
Сразу оговоримся, что совсем дешево делать не будем, т.к. не хочется убивать нервные клетки, делая доморощенные энкодеры для моторчиков + хочется упростить создание 3D модели, которая нужна для управления через ROS (ссылка на готовую модель – ниже в статье).
На момент написания статьи ориентировочная конечная стоимость изделия составляет ~70 000 руб. Если у вас есть 3D принтер, то можно смело вычесть из нее 20 000 руб. Если принтера нет, то его появление станет приятным бонусом. Все расходы я буду описывать исходя из того, что у нас нет ничего, кроме денег.
Как выглядит результат:

Также нужно отметить, что для программирования руки нам понадобится компьютер с установленными ОС Linux (я использую Ubuntu 18.04) и фреймворком ROS (я использую Melodic).
Отвечаю. Изначально я не хотел заморачиваться с созданием роборуки и думал просто купить что-нибудь простенькое, но достаточно функциональное в сборе.
Что являлось для меня критериями функциональности и минимальной допустимой простотой (т.е. почему НЕ подойдут манипуляторы с алиэкспресса) – можно обсудить в комментариях, чтобы не грузить тех, кому это очевидно и/или не интересно.
Конкурентные решения на рынке
Опишу, однако, кратко примеры того, что я рассматривал на рынке:
Забегая немного вперед скажу, что делать мы будем копию робо-руки PhantomX Pincher Robot Arm Kit Mark II, которая производится именно компанией TossenRobotics.
Итого, видим, что 70 000 руб – это совсем не так дорого.
Что же нам нужно купить?
Все цены привожу на момент написания статьи (июль 2020 года):
1) 6 моторчиков DYNAMIXEL AX-12A

Я покупал по цене 7200 руб за 1 штуку, но, кажется, можно найти и за 6000 при большом желании. Будем считать, что вам не повезет и вы тоже купите за 7200.
Суммарная стоимость: 43 200 руб
Подойдет любой простенький, можно уложиться в 20 000 руб.
3) Arduino Uno + Power Shield


Стоимость: ~4 000 руб
4) Опционально (но я очень рекомендую): Лабораторный источник питания

Стоимость: ~3 500 руб
Сборка
Отлично! Мы закупили все, что нам нужно (вероятно, дольше всего ждали доставки моторчиков, мне их везли больше месяца).
1) Напечатаем детали для манипулятора на 3D принтере.
Качаем STL файлы отсюда
2) Собираем воедино с моторчиками. Проблем со сборкой быть не должно, но если они вдруг появятся, можно воспользоваться вот этой инструкцией
Делаем 3D модель
Класс! Рука у нас есть, но ведь ей же нужно как-то управлять. Хочется максимально использовать достижения человечества, поэтому установим себе ROS.
Для того, чтобы полноценно работать с манипулятором в ROS – нужно сделать его URDF модель. Она будет нам необходима для того, чтобы управлять робо-рукой с помощью пакета MoveIT!
На момент написания статьи последняя стабильная сборка доступна для Melodic/Ubuntu 18.04, чем и объясняется мой выбор версии системы и фреймворка в начале статьи.
Построение URDF модели – довольно трудоемкая (и, на мой взгляд, самая скучная) часть данного проекта. Нужно немного допилить напильником stl модели компонентов и соединить их воедино в XML-образном файле, вручную подбирая правильные коэффициенты смещения деталей друг относительно друга.
Кто хочет – может проделать работу самостоятельно, всем остальным поберегу нервы и просто дам ссылку на свой готовый файл:
В данной модели пока нет захватывающего устройства, однако, до того момента, чтобы захватывать предметы в реальном мире нам еще далеко. Для остальных задач этой модели более чем достаточно.
Выглядит модель вот так:
Из полученного URDF файла мы сделаем конфиг MoveIT!, который позволит нам моделировать движения манипулятора и отправлять управляющие команды на реальную робо-руку.
Для создания конфига есть отличный туториал (ссылка)
Тут я могу опять сэкономить время и предоставить свой конфиг. Лежит он вот тут:
Можно скачать конфиг с гитхаба и запустить следующей командой:
Примерно так можно будет управлять нашей реальной робо-рукой через rviz, когда мы подключим ее к ROS:
А что с реальной рукой?
Переместимся из мира 3D моделей в суровую реальность. У нас есть собранный ранее манипулятор. Хотелось бы его как-то подвигать. Сделаем это с помощью Arduino UNO и Power Shield.
Подключим первый моторчик манипулятора (который снизу) к Power Shield'у и блоку питания следующим образом:

Да, data pin моторчика мы соединим сразу с 3 и 4 выводом Arduino. Пытливый читатель мануала Dynamixel (вот он) сразу заметит, что связь с внешним миром у моторчика организована по Half Duplex Asynchronous Serial Communication, а это означает, что data pin используется сразу и для получения команд и для ответа.
По умолчанию, на аппаратном уровне Arduino умеет работать только с Full Duplex UART. Эту проблему можно обойти, используя Soft Serial библиотеку, что мы и сделаем. Именно использование Half Duplex режима объясняет подключение data pin мотора к 3 и 4 выводам шилда одновременно.
Помимо полудуплексного обмена работа с Dynamixel через Arduino имеет еще пару занимательных моментов, которые могут быть не совсем очевидны с самого начала. Сведем их все воедино.
Как подвигать наш манипулятор?
1) Сначала скачаем нужную библиотеку. Она называется ardyno и ее можно получить через Arduino Library Manager, либо тут (ссылка)
2) По умолчанию Dynamixel AX-12A хотят работать с baud rate = 1000000. Однако Software Serial Interface не потянет такую скорость, поэтому baud rate стоит снизить до 57600. Таким образом, начало файла с вашей программой будет выглядеть примерно вот так:
3) Все наши моторчики соединены друг с другом последовательно. Значит, чтобы обращаться к каждому из них — нужно знать его ID? Это действительно так, объект DynamixelMotor при инициализации получает два параметра: interface (одинаков для всех, его мы задали в предыдущем пункте) и id (должен быть у всех разный, иначе поведение будет у манипулятора весьма странное)
Id каждому моторчику придется задать вручную. Кажется, что будучи соединенными последовательно, они могли бы и сами рассчитаться по номерам от 1 до 6, но этого не предусмотрено. Поэтому нужно каждый моторчик отдельно подключить к Arduino (отключив от остальных) и выполнить следующую программу:
Изначально все моторчики имеют именно поэтому мы и указываем вверху
NEW_ID для каждого моторчика нужно заменить на число от 1 до 6 (да, ок, первый моторчик можно не трогать). Нумеруем их в порядке от нижнего к верхнему.
Ура! у нас есть полноценный манипулятор, который мы можем двигать, а также имеется 3D модель к нему. Можно брать ROS и программировать любые крутые штуки. Но это уже рассказ для отдельной статьи (и не одной). Данное же повествование подошло к концу, спасибо за внимание!
Читайте также: