
Тормозной резистор своими руками
Добавил пользователь Алексей Ф. Обновлено: 05.10.2024
При работе преобразователя частоты для остановки электродвигателя используются два режима: режим выбега (двигатель останавливается по инерции) и режим торможения с управляемым временем замедления.
Режим остановки на выбеге
Остановка на свободном выбеге означает, что при подаче команды STOP выходы преобразователя отключаются от двигателя, и его ротор вращается по инерции. Время торможения при этом будет неопределенным, зависящим только от инерционных свойств нагрузки. Этот режим выбирается, когда нагрузка имеет большой момент инерции, а время торможения не критично.
Режимы остановки с замедлением
При остановке электродвигателя в режиме торможения время замедления задается пользователем в настройках частотного преобразователя, и может быть как больше, так и меньше времени остановки на выбеге.
В режиме с относительно большим временем замедления выходная частота преобразователя плавно уменьшается до заданной минимальной, затем напряжение с двигателя снимается. Фактически происходит не торможение, а плавное понижение оборотов двигателя.
При уменьшении времени замедления двигатель может переходить в генераторный режим с накоплением излишней энергии в звене постоянного тока ПЧ. Это происходит не только при замедлении, но и при отрицательном крутящем моменте, когда двигатель поддерживает заданную скорость, а нагрузка пытается ее увеличить.
Напряжение в звене постоянного тока может превышать допустимые значения в определенных пределах. В подобных случаях нужно либо увеличить время торможения, либо использовать тормозной резистор.
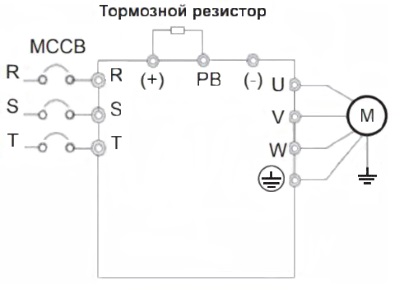
Модель тормозного модуля и номинал резистора выбираются в соответствии с рекомендациями производителя, исходя из мощности ПЧ и условий его работы. Также при проектировании и эксплуатации оборудования нужно учитывать, что резистор может значительно нагреваться в процессе работы.
Частотник без тормозного резистора
В некоторых моделях частотных преобразователей предусмотрена функция ограничения перенапряжения на шине постоянного тока. Тормозной резистор в таком случае не используется, при этом автоматически поддерживается максимальный тормозной момент, а время замедления может быть минимальным для данной нагрузки.
Без тормозного резистора можно обойтись еще в одном случае. Если в оборудовании используется несколько преобразователей частоты с одинаковым напряжением шины постоянного тока, их шины можно объединять. В результате ПЧ могут взаимно поглощать излишнее напряжение при торможении.
Приводы кранов, конвейеров и другого промышленного оборудования, работающего в повторно-кратковременных режимах с частыми включениями, отключениями и реверсами, оснащают тормозными устройствами, которые обеспечивают быструю остановку электродвигателя. Для этого используются электродинамический и механический метод.
Электродинамическое торможение достигается:
- Подачей постоянного напряжения на обмотки статора. При этом возникает неподвижное магнитное поле, создающее тормозной момент.
- Изменением порядка подключения фаз. Магнитное поле начинает вращаться в направлении, противоположном направлению вращения ротора электрической машины.
В обоих случаях на валу электродвигателя возникает отрицательный момент, обеспечивающий быструю остановку. Это необходимо для инерционных механизмов с высокой нагрузкой.
Электродинамическое торможение при помощи ПЧ
Большинство частотно-регулируемых приводов обеспечивают динамическое торможение асинхронного электродвигателя. При помощи ПЧ можно реализовать схемы торможения постоянным током и противовключением.
Электродинамическое торможение обладает следующими преимуществами:
- Высокая скорость торможения, что необходимо для точного позиционирования груза.
- Простота аппаратной реализации. Для этого требуются частотный преобразователь с тормозным прерывателем и резистор.
- Упрощение кинематической схемы оборудования.
При принудительной остановке электродвигателя, электроэнергия рассеивается в цепи, вызывая избыточный нагрев и срабатывание тепловой защиты. Для того чтобы избежать этого, применяют тормозные резисторы, обеспечивающие падение генерируемого напряжения и эффективное рассеивание тепла.
Электродинамическое торможение без дополнительных сопротивлений возможно для оборудования с нечастыми пусками, реверсами и остановками. Для грузоподъемных механизмов, рольтангов, лифтов необходим тормозной резистор.
Частотные преобразователи Данфосс с функцией динамического торможения комплектуются встроенным модулем Brake Choppe. Это устройство представляет собой электронный ключ на транзисторах IGBT, встроенный в звено постоянного тока. Возможна также опциональная комплектация этим блоком. Подключение тормозного резистора без прерывателя недопустимо.
Выбор тормозного резистора
Характеристики резисторов должны отвечать параметрам электропривода, типу частотного преобразователя, режимам пуска и эксплуатации двигателя. Компания Данфосс выпускает широкий модельный ряд добавочных сопротивлений для приводов разной мощности и марок. Тормозные резисторы выбирают:
- По циклу торможения (от 10% номинального момента, применяемых для вентиляторов, до 50% для механизмов с высоким моментом инерции).
- Числу фаз (одно- трехфазные).
- Номинальному напряжению.
- Классу защиты от пыли от влаги IP.
- Максимальной и номинальной мощности.
- Сопротивлению.
- Режиму работы электродвигателя.
Расчет характеристик делается по специальной методике на стадии проектирования привода или при его модернизации.
Расчет тормозного резистора
Исходными данными для вычисления параметров тормозных резисторов служат номинальное напряжение, мощность и частота вращения электродвигателя, момент инерции на валу, время остановки и т.д.
Расчет делается в несколько этапов:
-
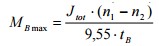
Определение максимального момента торможения. Эта величина определяется по формуле:
Где n1, n2 начальная и конечная скорость замедления, J – сумма все моментов инерции на валу, t – проектное время замедления.
где n1, n2 начальная и конечная скорость замедления, t – проектное время замедления, М- максимальный момент торможения.
где U – напряжение звена постоянного тока, Р – электрическая мощность торможения.
При расчете также учитывается коэффициент уменьшения нагрузки, который зависит от мощности привода, к.п.д. редуктора. Если передаточный механизм не включен в состав электропривода, значение к.п.д. редуктора принимается равным единице.
При необходимости управления торможением без добавочного сопротивления, при программировании ПЧ указываем отсутствие тормозного резистора или выбираем торможение противовключением на низкой частоте.

Компания Данфосс выпускает резисторы с рабочим циклом от 10% до 40%, класса пылевлагозащищенности IP20, IP65. Мощные устройства комплектуют термодатчиками и устройствами защиты от перегрева.
В статье рассматривается методике расчета и выбора тормозного сопротивления (тормозного резистора) для преобразователей частоты (ПЧ, частотника), на примере остановки асинхронного двигателя типа АИР.
Тормозные резисторы являются необходимыми элементами систем с тяжелыми режимами торможения (остановка большой нагрузки за малое время), если в их составе имеются преобразователи частоты с промежуточным звеном постоянного тока (например, серии GA700, GA500, A1000, L1000, J1000).

YASKAWA преобразователи частоты серий GA700 и GA500
Примерами таких систем могут служить:
- Лифты, эскалаторы.
- Различные краны и подъемные механизмы.
- Шпиндели станков.
- Конвейеры и системы подачи заготовок.

Примеры применений где требуются тормозные сопротивления
Пример расчета тормозного резистора
В качестве примера, рассмотрим работу преобразователя частоты серии GA700 (модель CIPR-GA70C4208) с двигателем АИР 280 М6 с циклом работы в 90 секунд и временем торможения 4 секунды (остановка производится с номинальной скорости вращения до 0). Двигатель подключен к механизму напрямую (без редуктора), а общий момент инерции составляет 38 кг*м 2 .

Циклограмма работы с участком торможения двигателя
Из циклограмм видно насколько сильно растет значение момента при переходе в отрицательную область во время торможения.
Если не предпринять меры по утилизации энергии, которая поступает на ПЧ во время торможения электродвигателя, то преобразователь отключится по ошибке перенапряжения на звене постоянного тока (код OV у YASKAWA). А в случае большой инерционной нагрузки на валу электродвигателя могут выйти из строя конденсаторы звена постоянного тока (ЗПТ).
Для утилизации возникающей энергии используют или тормозные сопротивления, преобразующие энергию в тепло, или рекуператоры для возврата ее в питающую сеть.
Для выбора тормозного резистора в первую очередь нам нужно определить электрическую мощность торможения:
Находим номинальную скорость двигателя в рад/с:
wном = 2p * nном / 60 = 2p * 968 / 60 = 101,3 [рад/c]
Рассчитываем максимальный момент для полной остановки по заданному циклу. Если механика имеет в своем составе несколько кинематических узлов (например, редукторы, барабаны и т.д.), то в суммарном моменте инерции эти узлы должны быть приведены к валу двигателя:
Mмакс = J∑* (wнач – wкон) / tторм = 38 * (101,3 – 0) / 4 = 962,35 [Н * м]
Определяем максимальную мощность при торможении:
Pмакс = Mмакс * (wнач – wкон) = 962,35 ´ (101,3 – 0) = 97486 [Вт]
Определяем электрическую мощность торможения. Так, как отсутствует редуктор, то величину его КПД берем равной 100%:
Pэл.торм = (Pмакс – k * Pном.дв) – ((1 – hред) * Pмакс )= (97486 – 0,05 * 90000) – ((1 – 1) * 97486) = 92986 [Вт]
Здесь k – вспомогательный коэффициент, зависящий от номинальной мощности двигателя:
Производим расчет допустимого сопротивления резистора:
Rмакс = U 2 зпт / Pэл.торм = 760 2 / 92986 = 6,2 [Ом]
будет иметь следующие значения в зависимости от величины напряжения на входе ПЧ:
– для 220 В: Uзпт = 388 В ± 3 %
– для 380 В: Uзпт = 757 В ± 3 %
Определяем продолжительность включения (ПВ) для режима торможения:
ПВ = (tторм / Tцикла) ´ 100% = (4 / 90) ´ 100% = 4,4 %
Находим номинальную мощность тормозного резистора:
Pторм.ном = Pэл.торм / fk = 92986 / 10 = 9298,6 [Вт]
где – коэффициент, зависящий от значения ПВ (соответствие на рис.3)

Зависимость коэффициента fk от ПВ
Согласно расчету, получается резистор 6Ом/18,5кВт. Один резистор этим условиям не удовлетворяет, но можно использовать по два резистора RH-9600W015-10 (9,6 кВт, 15 Ом, ПВ=10%).

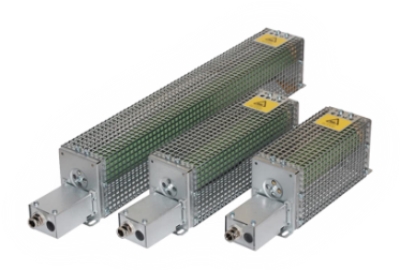
Тормозные резисторы разной мощности RFH и БТ
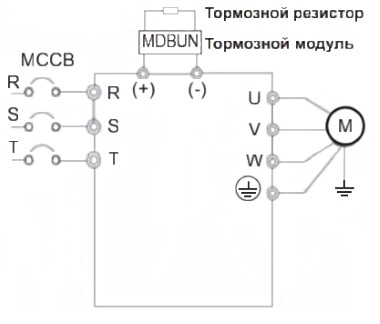
Выбор тормозного модуля
Для сброса энергии со звена постоянного тока при его повышении используется специальный силовой транзистор, называемый тормозным. Он может быть, как встроенным, так и внешним. У преобразователей YASKAWA тормозные модули встроены в сам ПЧ до определенной мощности:
- A1000 и L1000: до 30 кВт (тяжелый режим нагрузки [HD])
- GA700: до 75 кВт [HD]

Пример внешнего тормозного модуля YASKAWA CDBR-4045D
Для проверки работоспособности тормозного транзистора в данном режиме, необходимо найти ток, который будет протекать через него во время торможения. В нашем случае это будет:
Iторм = Uзпт / Rторм.ном = 760 / (15 / 2) = 101,3 [А]
В данном случае преобразователь GA700 имеет номинальную мощность 90 кВт при тяжелом режиме нагрузки [HD] и требует установки внешних тормозных модулей. По каталогу рекомендуется установка двух модулей CDBR-4045D с максимальным суммарным током 120 А.

Таблица характеристик тормозных модулей YASKAWA CDBR
Выводы
Расчет режимов торможения и выбор тормозных резисторов для преобразователей частоты необходимый этап перед его покупкой, чтобы в последствии избежать простоя оборудования и выхода из строя ПЧ.
Задача: резко выключить и остановить двигатель. У частотника три варианта торможения: постоянным током, резистором и переменным током. Как я понимаю наиболее эффективно торможение переменным током. Так ли это?
И второй вопрос: Для функции торможения постоянным током можно запрограммировать какой-либо вход (функция №5). Но как, елки палки, пользоваться функцией торможения переменным током и резистором?? Так и не нашел в РЭ.
1. Что значит - эффективно?
2. Разберитесь сначала, как работает каждый из механизмов торможения.
1. Под эффективностью имею ввиду с минимальным выбегом по инерции.
2. В РЭ на ПЧВ не объясняется суть торможение переменным током. Ну я как понимаю имеется ввиду торможение противовключением. Которое является наиболее эффективным из сих трех методов.
3. Так как же включить этот вид торможения на частотнике, кто знает?
1. А Вы уверены, что движок это выдержит при достаточно частом торможении?
2. Считайте, что это обычное торможение. Которое данный инвертор не очень любит, при большой скорости торможения.
Самый эффективный способ включает в себя тормозной резистор. При торможении выделяется энергия, которую нужно куда-то девать. Часть этой энергии расходуется на собственно торможение, аккумулируется в звене постоянного тока, а часть сливается в тормозной резистор.
Выбег по инерции возможен: 1. Если вы его явно включили; 2. Если выбранный режим торможения перегрузил преобразователь и системы защиты отключили управляемое торможение. В остальных случаях остановка происходит с учетом установленного времени замедления (DEC)
1. А Вы уверены, что движок это выдержит при достаточно частом торможении?
Движок 1,1 кВт с редуктором крутит шнек дозатор. Который примерно раз в полчаса будет пускаться на несколько минут и останавливаться. Чтобы точней была дозировка нужно убрать выбег. Там в принципе сам шнек и груз будут неплохим балластом для торможения. Не думаю, что движку будет больно.
Самый эффективный способ включает в себя тормозной резистор. При торможении выделяется энергия, которую нужно куда-то девать. Часть этой энергии расходуется на собственно торможение, аккумулируется в звене постоянного тока, а часть сливается в тормозной резистор.
Тормозной резистор - это пассивное торможение. Эффективней когда на обмотки подается ток и создает магнитное поле для торможения.
Не совсем так, вернее - совсем не так.
При отсутствии тормозного резистора тепло (кинетическая энергия системы) рассеивается на двигателе, при наличии - на резисторе.
Частотный регулятор это устройство, в первую очередь предназначенное для управления оборотами электродвигателя, а торможение- это уже второстепенная функция, расширяющая возможности частотного преобразователя. Если задача состоит в том, чтобы в нужный момент времени останавливался шнек, то здесь целесообразнее использовать дополнительные тормозные механизмы на валу шнека (или электродвигателя, или редуктора), которые могут быть электромагнитными, ленточными и др., а частотнику все же дать возможность работать по первоочередному предназначению. В конце концов, выход из строя дополнительного тормозного механизма - не так болезненно скажется на технологическом процессе и на финансовых ресурсах, чем как если бы вышел из строя сам частотник или электродвигатель.
Тормозной резистор - это пассивное торможение. Эффективней когда на обмотки подается ток и создает магнитное поле для торможения.
Нет, по крайней мере на относительно современных преобразователях с векторным управлением. Торможение происходит сдвигом (отставанием) прикладываемого поля относительно вращающегося поля ротора. При этом двигатель переходит в генераторный режим, выделяемая энергия частично расходуется на создание вращающегося тормозящего поля, остальное аккумулируется в конденсаторе постоянного звена. Соответственно, на нем растет напряжение. При превышении некоторого значения (500-600В), контроллер ПЧ уменьшает интенсивность торможения, чтобы уменьшить выделение энергии. При наличии в системе тормозного резистора, он подключается в этот момент и позволяет разряжать конденсатор через себя, не допуская перенапряжений и позволяет контроллеру удерживать значительный тормозящий момент.
В 21 веке никто не коротит обмотки через резисторы )))
Частотный регулятор это устройство, в первую очередь предназначенное для управления оборотами электродвигателя, а торможение- это уже второстепенная функция.
вы ошибаетесь, торможение - работа в 4 квадранте, ничем по своей сути не отличается от 1 квадранта - двигательного режима. Механические тормоза - это удержание вала в выключенном состоянии, ну только иногда аварийная блокировка, типо последнего шанса.
имелось в виду то, что для инерционного объекта регулирования применение механического тормоза куда более оправдано и менее энергозатратно. попробуйте ж/д локомотив остановить только электродвигателем.
имелось в виду то, что для инерционного объекта регулирования применение механического тормоза куда более оправдано и менее энергозатратно. попробуйте ж/д локомотив остановить только электродвигателем.
Таки вы будете смеяться, но рекуперативное торможение двигателем вплоть до остановки. Тоже самое в электромобилях. При торможении выделяется энергия, очень здорово если ее удается удержать в магнитном или электрическом поле - с ними легко работать. При механическом торможении - энергия выделяется в виде тепла, которое крайне сложно утилизировать
Таки вы будете смеяться, но рекуперативное торможение двигателем вплоть до остановки. Тоже самое в электромобилях. При торможении выделяется энергия, очень здорово если ее удается удержать в магнитном или электрическом поле - с ними легко работать. При механическом торможении - энергия выделяется в виде тепла, которое крайне сложно утилизировать
Ребят, я знаю вас медом не корми, только дай про вечный двигатель пофилософствовать ))
Есть у кого опыт, знание работы с овеновским ПЧВ102-1К5-В?
Как на нем включить торможение переменным током??
А зачем утилизировать? Это обычное трение, далее тепло рассеивается. Да и в случае применения частотника при торможении электродвигателя также выделяется тепло- его то как утилизируете? Причем здесь рекуперация- отдача энергии обратно в сеть при переходе электродвигателя в генераторный режим? На инерционном объекте, как в примере с ж/д локомотивом, рекуперативным торможением вы оооочень долго будете останавливаться.
Изначально задача ведь стояла в нужный момент времени остановить электродвигатель (шнек) для точной дозировки, а о рекуперации ни "речи". Да и рекуперация в основном применяется на электротранспорте, где есть инерция и есть смысл полезно утилизировать (отдавать в сеть) энергию.
2-10 = 2 - включить режим динамического торможения
2-16 = 100, - тормозной ток в процентах от номинального, можно увеличить до 150 для большей интенсивности
2-17 = 2 - контроль перенапряжений, чтобы не останавливался по ошибке
2-10 = 2 - включить режим динамического торможения
2-16 = 100, - тормозной ток в процентах от номинального, можно увеличить до 150 для большей интенсивности
2-17 = 2 - контроль перенапряжений, чтобы не останавливался по ошибке
Это я читал в РЭ. Но вопрос как включать это торможение при работе. На дискретных входах ПЧВ есть выбор функции 5-1*: "5- торможение постоянным током, инверсный;" Но нет выбора для торможения переменным током.
А зачем утилизировать? Это обычное трение, далее тепло рассеивается. Да и в случае применения частотника при торможении электродвигателя также выделяется тепло- его то как утилизируете? Причем здесь рекуперация- отдача энергии обратно в сеть при переходе электродвигателя в генераторный режим? На инерционном объекте, как в примере с ж/д локомотивом, рекуперативным торможением вы оооочень долго будете останавливаться.
Изначально задача ведь стояла в нужный момент времени остановить электродвигатель (шнек) для точной дозировки, а о рекуперации ни "речи". Да и рекуперация в основном применяется на электротранспорте, где есть инерция и есть смысл полезно утилизировать (отдавать в сеть) энергию.
Тепло выделяется быстро и локально, что приводит к тепловому разрушению механических тормозных устройств. При использовании ПЧВ тепло собственно не выделяется, ибо идет торможение полем. Чуть увеличенный нагрев несоизмерим с гасимой энергией и обусловлен КПД преобразования. В случае ПЧВ идет не полная рекуперация в сеть, а накопление энергии на внутреннем конденсаторе, т.е. преобразователь вливает ток в двигатель, не забирая его из сети, так сказать сам себя кормит.
"Поезд" т.е. шнек мгновенно остановить невозможно )) речь идет о контроллируемом останове, за заранее заданное время, что собственно и даст точную дозировку.
Время рекуперативного торможения зависит от желания "машиниста", с двигателя можно снимать энергию в любых количествах, это определяется возможностью применяемой электроники. Современные преобразователи позволяют плоскую характеристику, вплоть до минимальных частот. Экспоненциальные остались в середине 20 века.
оно будет использоваться когда вы снимите сигнал "вперед" ну или "назад". В обычном случае при снятии сигнала вращения, ПЧ начинает подавать на двигатель уменьшающуюся частоту. Время замедления будет взято из настроек. Предполагается что энергия расходуется на полезную нагрузку и мотор остается в двигательном режиме все время. Если нагрузка инерциальная, то получается некий выбег.
При использовании динамического торможения, ПЧ подает на двигатель поле, отстающее по фазе от вращающегося поля ротора, и переводит двигатель в генераторный режим, выдерживая таким образом темп замедления нужный для точного соответствия времени остановки из настроек, независимо от инерции нагрузки.
При использовании динамического торможения, ПЧ подает на двигатель поле, отстающее по фазе от вращающегося поля ротора, и переводит двигатель в генераторный режим, выдерживая таким образом темп замедления нужный для точного соответствия времени остановки из настроек, независимо от инерции нагрузки.
Почему тогда для торможения постоянным током предоставлена выделенная функция, которую можно запускать сигналом на дискретном входе, либо по rs-485. А для динамического торможения такой отдельной "кнопки" нет. Где собака зарыта то.
Потому что в инструкции не совсем верный перевод понятия. Правильная трактовка звучит примерно как "удержание постоянным током". И применяется в основном для удержания вала от проворачивания после остановки, в стояночных режимах. При торможении его конечно тоже используется, но результат мало предсказуем, в смысле что время до остановки будет меняться в зависимости от нагрузки и многих других факторов, ну и выбег больше. Мне кажется что режим сохраняют как наследие от старых ПЧ, с U/f характеристикой, когда динамическое торможение было просто недоступно. Кстати, и его можно включать как автоматически, так и командой по интерфейсу.
На инерционном объекте, как в примере с ж/д локомотивом, рекуперативным торможением вы оооочень долго будете останавливаться. Вы не поверите, но именно на ЖД локомотивах во всю используется данный вид торможения с четким управлением составом.
Не будем говорить про заграницу. На вагонах метро типа Русич и Ока применяется рекуперативное торможение и керамические колодки. Причем рекуперативное торможение вплоть до скорости в несколько км/ч только потом включаются механические тормоза. Преимущества - экономия до 35% энергии и практическая безызносность колодок.
Потому что в инструкции не совсем верный перевод понятия. Правильная трактовка звучит примерно как "удержание постоянным током". И применяется в основном для удержания вала от проворачивания после остановки, в стояночных режимах. При торможении его конечно тоже используется, но результат мало предсказуем, в смысле что время до остановки будет меняться в зависимости от нагрузки и многих других факторов, ну и выбег больше. Мне кажется что режим сохраняют как наследие от старых ПЧ, с U/f характеристикой, когда динамическое торможение было просто недоступно. Кстати, и его можно включать как автоматически, так и командой по интерфейсу.
Да есть там отдельная функция удержания постоянным током. Которая включается при запуске и также при остановке двигателя, когда частота становится ниже уставки. К всему этому есть отдельная функция торможения постоянным током, включаемая сразу при рабочем двигателе, которая означает одновременно стоп и торможение. Но на переменное торможение и торможение резистором такой функции нет. Будем надеяться, что она автоматически включиться при съеме сигнала пуск двигателя.
Шнек с маломощным (1,1 кВт) мотор-редуктором, да еще и заполненый сыпучим продуктом остановится практически мгновенно и без всякого принудительного торможения.
Powered by vBulletin® Version 4.2.3 Copyright © 2022 vBulletin Solutions, Inc. All rights reserved. Перевод: zCarot
Читайте также: