
Тахогенератор своими руками схема
Добавил пользователь Алексей Ф. Обновлено: 18.09.2024
Автомобильный тахометр — это измерительный прибор, который предназначен для измерения количества оборотов коленчатого вала двигателя в минуту (об/мин). Раньше в автомобили устанавливались механические тахометры. В современных автомобилях устанавливаются электрические или электронные тахометры.
Во время работы двигателя автомобиля тахометр позволяет контролировать стабильность его оборотов на холостом ходу и при движении автомобиля. По стабильности оборотов на холостом ходу можно судить о состоянии системы подачи топлива, системы зажигания и самого двигателя.
При установке оборотов холостого хода и регулировки угла опережения зажигания двигателя с помощью стробоскопа без тахометра не обойтись. Необходимо одновременно производить регулировку и наблюдать за оборотами двигателя. После каждого подкручивания винта регулировки смотреть показания тахометра, установленного в салоне автомобиля неудобно. Может выручить установленное в салоне зеркало, но это тоже не лучшее решение. Гораздо удобнее иметь тахометр, вмонтированный в стробоскоп.

При изготовлении стробоскопа своими руками я вмонтировал, тахометр в его корпус. При проверке и настройке УОЗ двигателя такое техническое решение показало удобство в работе.
Опубликованные в Интернете аналоговые схемы тахометров отличаются большей погрешностью показаний, выполненные на цифровых микросхемах не каждому автолюбителю под силу повторить.
Предлагаемое Вашему вниманию схемное решение тахометра отличается простотой и высокой точностью показаний в независимости от изменения температуры окружающей среды и питающего напряжения. Имеет растянутую шкалу, что позволяет при применении малогабаритного стрелочного индикатора измерять частоту оборотов двигателя с высокой точностью.
Электрическая принципиальная схема
Представленная схема тахометра отличается простотой и доступностью деталей для повторения благодаря применению интегрального таймера - микросхемы КР1006ВИ1 (аналог NE555).

Питающее напряжение на схему тахометра подается непосредственно с клемм автомобильного аккумулятора.
Принцип работы
При поступлении импульсов от прерывателя или катушки индуктивности, используемой в стробоскопе, конденсатор С1 через диод VD1 и резистор R1-R2 перезаряжается, создавая на базе транзистора VT1 импульсы, открывая его. В результате на коллекторе транзистора, включенного в ключевом режиме, образуются короткие положительные импульсы, длительность которых определяется емкостью конденсатора С1. VT2 служит для инвертирования импульсов, перед подачей на вход DA1. Форма импульсов приведена на электрической схеме тахометра с правой стороны, верхняя осциллограмма. На фото ниже структурная схема КР1006ВИ1.

Интегральный таймер КР1006ВИ1 включен по типовой схеме формирователя импульсов. По положительному фронту импульсов, поступающих на вход 2, микросхема формирует на выходе 3 положительные импульсы с шириной, линейно изменяющейся в зависимости от частоты поступающих на вход. Частота выше, импульсы шире. Исходная ширина импульсов зависит от постоянной времени R6, R7 и C3.
Благодаря такому схемному решению удалось исключить нелинейные элементы, получить линейное показание миллиамперметра при изменении частоты и обеспечить высокую точность измерений частоты вращения двигателя за счет растянутой шкалы. Так как в тахометре, по соображениям габаритных размеров, применен малогабаритный миллиамперметр от индикатора уровня записи магнитофона, у которого длина шкалы мала, то только благодаря растянутой шкале удалось получить высокую точность показаний.
Микросхемы стабилизаторов серии К142ЕН обеспечивают стабильное выходное напряжение в широком диапазоне температуры, чем и обусловлено применение микросхемы К142ЕН8А в тахометре. Конденсаторы С2, С5 и С6 установлены для сглаживания пульсаций питающего напряжения.
Конструкция и детали
Так как схема простая, то печатную плату я не разрабатывал. Монтаж всех деталей, кроме миллиамперметра, выполнил на универсальной макетной плате размером 30 мм×50 мм. На фотографии видно как размещены элементы схемы.
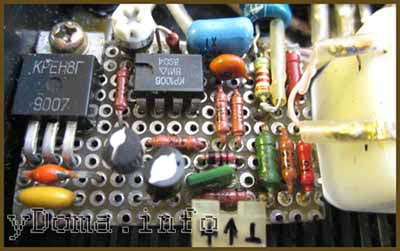
Для подвода питающего напряжения и входного сигнала применен трехконтактный разъем. Шкала миллиамперметра напечатана на принтере и приклеена сверху на его штатную шкалу.

Плата с деталями закреплена в крышке корпуса стробоскопа на винтах. Миллиамперметр установлен в вырезанном в крышке корпуса прямоугольном окне и закреплен с помощью силикона.

Такая конструкция размещения тахометра обеспечивает удобство доступа к плате стробоскопа, достаточно снять крышку, отсоединить разъем.
Настройка тахометра
Если не допущены ошибки при монтаже деталей и исправны элементы схемы, то тахометр сразу начнет работать. Необходимо будет только подогнать номиналы резисторов моста. Для этого нужно с импульсного генератора подать на вход тахометра прямоугольные импульсы частотой, взятой из нижеприведенной таблицы и откалибровать шкалу.
| Таблица перевода оборотов вращения двигателя в частоту | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Обороты двигателя, оборотов в минуту | 700 | 800 | 900 | 1000 | 1100 | 1200 | 1500 | 2000 | 2500 | 3000 | 3500 | 4000 | 4500 | 5000 | 6000 |
| Частота генератора, Гц | 12 | 13 | 15 | 17 | 18 | 20 | 25 | 33 | 42 | 50 | 58 | 67 | 75 | 83 | 100 |
| Частота генератора, 2×Гц | 24 | 26 | 30 | 34 | 36 | 40 | 50 | 66 | 84 | 100 | 116 | 134 | 150 | 166 | 200 |
Так как в автомобилях обычно за один оборот вала двигателя датчик выдает два импульса, то при калибровке тахометра нужно устанавливать частоту на генераторе в два раза больше. Например, при калибровке точки шкалы 800 нужно будет подать на вход тахометра импульсы частотой не 13 Гц, а 26 Гц. Ряд частот для такого случая приведен в нижней строке таблицы.
Для того, чтобы не испытывать трудностей при калибровке шкал тахометра нужно знать принцип работы мостовой схемы. Перед Вами принципиальная схема моста постоянного тока. При равенстве соотношений величин резисторов R1/R2 и R3/R4 напряжения в точках диагонали моста A и B равны, и ток через mA не протекает, стрелка стоит на нуле.
Если, например, уменьшить величину резистора R1, то напряжение в точке А увеличится, а в точке В останется прежним. Через миллиамперметр, находящийся в диагонали моста потечет ток и стрелка отклонится. То есть при постоянном напряжении в точке В и изменении напряжения в точке А стрелка прибора будет двигаться относительно шкалы.

В схеме тахометра функцию резистора R1 выполняет резистор R9, и так далее. При увеличении оборотов двигателя, частота и ширина импульсов с выхода микросхемы увеличивается и таким образом увеличивается напряжение в левой точке подключения миллиамперметра, протекающий ток увеличивается и стрелка отклоняется. Резисторы в плечах моста подобраны в таком соотношении, чтобы мост был изначально разбалансирован, и равенство напряжений в точках подключения миллиамперметра наступало при 700 оборотов двигателя.
Номиналы резисторов на схеме указаны при сопротивлении рамки миллиамперметра 1,2 кОм. Если использовать прибор, имеющий другое сопротивление рамки, то придется подбирать номинал резисторов R8, R9 и R12, R13, временно заменив их переменными. После калибровки прибора, измеряется сопротивление переменных резисторов, и они заменяется постоянными.
Переключатель S1 можно не устанавливать и настроить прибор для измерения в требуемом диапазоне по одной шкале. В таком случае точность измерений снизится в два раза. При растянутой шкале прибора такой точности тоже будет достаточно.
Тахометр, выполненный по предложенной схеме, является законченным прибором и его можно применять для измерения частоты вращения любых валов, например, двигателя моторной лодки, электродвигателей. В качестве датчиков могут использоваться датчики холла, фото и электромагнитные датчики. Достаточно доработать схему входного формирователя импульсов.
DIY цифровой тахометр на AVR ATtiny2313, КР514ИД2 и оптопаре
DIY цифровой тахометр на AVR ATtiny2313, КР514ИД2 и оптопаре
Добрый день. Выношу на Ваше рассмотрение схему простенького цифрового тахометра на AVR ATtiny2313
,
КР514ИД2
, и оптопаре спроектированного мною. Сразу оговорюсь: аналогичных схем в интернете много. У каждой реализации свои плюсы и минусы. Возможно, кому-то мой вариант подойдет больше. Начну, пожалуй, с
тех. задания.Задача
: нужно сделать цифровой тахометр для контроля оборотов электрического двигателя станка.
Вводные условия
: Есть готовый реперный диск на 20 отверстий от лазерного принтера. В наличии много оптопар от сломанных принтеров. Средние (рабочие) обороты 4 000-5 000 оборотов/минуту. Погрешность отображаемых результатов не должна превышать ± 100 оборотов.
Ограничение
: питание для блока управление составляет 36В (тахометр будет установлен в один корпус с блоком управления – об этом ниже).
Маленькое лирическое отступление.
Это станок моего друга. На станке установлен электромотор PIK-8, обороты которого контролируются согласно найденной в интернете и модифицированной схеме. По просьбе друга и был разработан простенький тахометр для станка.
Изначально в схеме планировалось применить ATMega16, но рассмотрев условия, решено было ограничиться ATtiny2313, работающего от внутреннего (RC) генератора на частоте 4 Мгц.
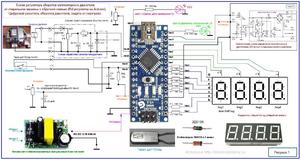
Общая схема
выглядит следующим образом:

Как видно, ничего сложного. Для преобразования двоичного кода в семисегментный, я применил дешифратор КР514ИД2, это дает сразу три плюса.
Сборка устройства
При необходимости внесения изменений в прошивку тахометра на плате предусмотрен разъем ISP.
На схеме подтягивающий резистор R12, номиналом 30 кОм, подобран опытным путём для конкретной оптопары. Как показывает практика – для разных оптопар он может отличаться, но среднее значение в 30 кОм должно обеспечить устойчивую работу для большинства принтерных оптопар. Согласно документации к ATtiny2313, величина внутреннего подтягивающего резистора составляет от 20 до 50 кОм в зависимости от реализации конкретной партии микроконтроллеров, (стр. 177 паспорта к ATtiny2313), что не совсем подходит. Если кто захочет повторить схему, может для начала включать внутренний подтягивающий резистор, возможно у Вас, для Вашей оптопары и вашего МК работать будет. У меня, для моего набора не заработало.
Так выглядит типичная оптопара от принтера.

Светодиод оптопары запитан через ограничивающий резистор на 1К, который я разместил непосредственно на плате с оптопарой. Для фильтрации пульсаций напряжения на схеме два конденсатора, электролитический на 220 мкФ х 25В (что было под рукой) и керамический на 0,1 мкФ, (общая схема включения микроконтроллера взята из паспорта ATtiny2313).
Для защиты от пыли и грязи плата тахометра покрыта толстым слоем автомобильного лака.
Замена компонентов.
Можно применить любой светодиодный индикатор на четыре цифры, либо два сдвоенных, либо четыре поодиночных. На худой конец, собрать индикатор на отдельных светодиодах.
Вместо КР514ИД2 можно применить КР514ИД1 (которая содержит внутри токоограничивающие резисторы), либо 564ИД5, К155ПП5, К155ИД9 (при параллельном соединении между собой ножек одного сегмента), или любой другой преобразователь двоичного в семисегментный (при соответствующих изменениях подключения выводов микросхем).
Транзисторы VT1-VT4 – любые слаботочные, работающие в режиме ключа.
Принцип работы
основан на подсчете количества импульсов полученных от оптопары за одну секунду и пересчет их для отображения количества оборотов в минуту. Для этого использован внутренний счетчик Timer/Counter1 работающий в режиме подсчета импульсов поступающих на вход Т1 (вывод PD5 ножка 9 МК). Для обеспечения стабильности работы, включен режим программного подавления дребезга. Отсчет секунд выполняет Timer/Counter0 плюс одна переменная.
Расчет оборотов
, на чем хотелось бы остановиться, происходит по следующей формуле: M = (N / 20) *60, где M – расчетные обороты в минуту (60 секунд), N – количество импульсов от оптопары за одну секунду, 20 – число отверстий в реперном диске. Итого, упростив формулу получаем: M = N*3. Но! В микроконтроллере ATtiny2313 отсутствует функция аппаратного умножения. Поэтому, было применено суммирование со смещением. Для тех, кто не знает суть метода: Число 3 можно разложить как 3 = 2+1 = 21 + 20. Если мы возьмем наше число N сдвинем его влево на 1 байт и приплюсуем еще одно N сдвинутое влево на 0 байт – получим наше число N умноженное на 3. В прошивке код на AVR ASM для двухбайтной операции умножения выглядит следующим образом:
Mul2bytes3: CLR LoCalcByte //очищаем рабочие регистры CLR HiCalcByte mov LoCalcByte,LoInByte //грузим значения полученные из Timer/Counter1 mov HiCalcByte,HiInByte CLC //чистим быт переноса ROL LoCalcByte //сдвигаем через бит переноса ROL HiCalcByte CLC ADD LoCalcByte,LoInByte //суммируем с учетом бита переноса ADC HiCalcByte,HiInByte ret
Проверка работоспособности и замер точности
проводился следующим образом. К вентилятору компьютерного куллера был приклеен картонный диск с двадцатью отверстиями. Обороты куллера мониторились через BIOS материнской платы и сравнивались с показателями тахометра. Отклонение составило порядка 20 оборотов на частоте 3200 оборотов/минуту, что составляет 0,6%.

Вполне возможно, что реальное расхождение составляет меньше 20 оборотов, т.к. измерения материнской платы округляются в пределах 5 оборотов (по личным наблюдениям для одной конкретной платы). Верхний предел измерения 9 999 оборотов в минуту. Нижний предел измерения, теоретически от ±10 оборотов, но на практике не замерялся (один импульс от оптопары в секунду дает 3 оборота в минуту, что, учитывая погрешность, теоретически должно правильно измерять скорость от 4 оборотов в минуту и выше, но на практике данный показатель необходимо завысить как минимум вдвое).
Отдельно остановлюсь на вопросе питания.
Вся схема питается от источника 5В, расчетное потребление всего устройства не превышает 300 мА. Но, по условиям ТЗ, тахометр конструктивно должен находится внутри блока управления оборотами двигателя, а к блоку от ЛАТРа поступает постоянное напряжение 36В., чтобы не тянуть отдельный провод питания, внутри блока установлена LM317 в паспортном включении, в режиме понижения питания до 5В (с ограничивающим резистором и стабилитроном для защиты от случайного перенапряжения). Логичнее было бы использовать ШИМ-контроллер в режиме step-down конвертера, на подобии МС34063, но у нас в городе купить такие вещи проблематично, поэтому, применяли то, что смогли найти.
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать - момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
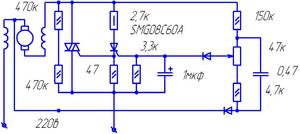
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
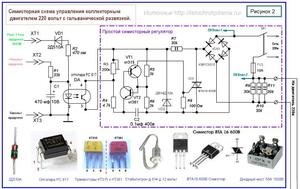
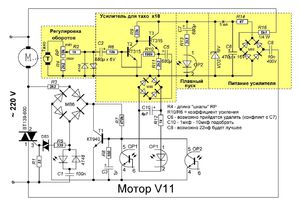
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:

- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать - момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Читайте также: