
Шагающие механизмы своими руками
Добавил пользователь Валентин П. Обновлено: 19.09.2024
Текст работы размещён без изображений и формул.
Полная версия работы доступна во вкладке "Файлы работы" в формате PDF
Предлагается новый способ шагающего движения с помощью кулачковых опор. Такие опоры устанавливаются на шатуны известных лямбдаоразных механизмов Пафнутия Львовича Чебышева. Эти опоры имеют два преимущества. Во-первых, шатун можно обрезать сверху до соединения с коромыслом, уменьшив высоту механизма в два раза. Во-вторых, шагающий механизм становится автономным, может работать один, чего нет в схеме П.Л.Чебышева. Главное преимущество заключается в переносе рабочей шагающей траектории из верхней части механизма ниже корпуса машины. Автономность работы механизма позволяет подступиться к решению другой технической задачи – повороту шагохода во время движения.
Ключевые слова: механизм, шарнир, рычаг, кулачок, траектория.
Цель работы заключается в смещении рабочей траектории опорной точки шагающего механизма вниз относительно корпуса. Недостатком шагающего механизма П.Л.Чебышева является верхнее расположении рабочей точки. Перевернуть механизм нельзя, потому что перевернётся траектория, будет потерян принцип шагающего движения. Однако сместить рабочую траекторию вниз необходимо, потому что опора машины всегда должна быть ниже корпуса. Для такого смещения разными авторами предлагалось несколько способов, в основном с дополнительными механизмами или устройствами. В этой статье предлагается решение технической задачи принципиально новым способом. Предлагается не дополнять кинематическую схему новыми механизмами, а напротив, уменьшить линейный размер шатуна, но выполнить это звено в виде кулачкового механизма с опорой на поверхность земли. Форму кулачка-опоры можно подобрать очень просто – это часть круга с центром в рабочей точке шатуна механизма П.Л.Чебышева. Но в новом механизме шатун обрезан до соединительного шарнира с коромыслом, поэтому бывшая рабочая точка шатуна стала воображаемой. Так как центр круга-шатуна двигается по прямолинейному отрезку, то рабочая опорная точка нижней части этого кулачка тоже будет двигаться прямолинейно, но с некоторым проскальзыванием. Незначительное скольжение является недостатком предлагаемого механизма, но зато значительно упрощает кинематическую схему. Создан демонстрационный макет предлагаемого механизма и машина.
Анализ литературы
Интерес к шагающим машинам возрастает. Это связано с освоением новых северных областей, в которых нет традиционной сети дорог, даже просёлочных. Слабые грунты должны выдерживать вес тяжёлых транспортных средств. Значит, колёса или гусеницы должны быть больших размеров, чтобы уменьшить давление на почву, снег или другую опорную поверхность. Но даже если размеры колёс или гусениц будут очень большими, остаётся проблема касательных напряжений, то есть проскальзывания. При движении с проскальзыванием, при пробуксовке разрушается верхний слой почвы, что особенно критично для растительности тундры. Общепризнанным фактом является экологичность шагающего способа передвижения по тундре с целью сохранения её растительности. Тем не менее, в настоящее время почти нет шагающего транспорта, даже отдельные опытные образцы не разработаны. Это связано с тем, что предложенный способ шагающего перемещения и разработанная в конце 19-го века машина русского инженера и учёного Пафнутия Львовича Чебышева остаются единственным техническим предложением в этой области [1]. Другие шагающие механизмы, например, Кланна и Тео Янсена, только называются шагающими, но по сути являются цепляющими, потому что не обеспечивают шагающую траекторию движения опорной точки, создавая те же самые касательные напряжения. В связи с этим за основу нового технического предложения был взят известный шагающий механизм П.Л.Чебышева, который часто называют лямбдаобразным механизмом и который часто не заслуженно связывают с именем Хойкена. Заслуга П.Л.Чебышева заключается в практическом применении шагающего механизма для создания нового транспортного средства, пусть даже в виде действующей модели, авторский исторический макет которой хранится в Музее Санкт-Петербургского государственного университета. Эта модель была повторена много раз, в том числе школьниками. Недостатком шагающей машины П.Л.Чебышева является верхнее расположение рабочих опорных точке в четырёх механизмах. Русский учёный сместил рабочую траекторию вниз с помощью вертикальных рычагов-опор. Но просто подвесить опоры на шарнирах к рабочей точке нельзя, потому что добавляется одна степень свободы, машина просто упадёт, что было проверено на практике. Для устранения этой лишней степени свободы П.Л.Чебышев попарно крестом жёстко соединил вертикальные рычаги-опоры: передний левый с задним правым, передний правый с задним левым. Учитывая, что новые связи не должны мешать движению других рычагов, конструкция машины получилась довольно сложной и громоздкой. При изучении шагающего движения и шагающих машин сразу же появился вопрос упрощения механической схемы.
Основной механизм П.Л.Чебышева
Цель работы заключается в смещении рабочей шагающей траектории с опорой на подстилающую поверхность ниже корпуса транспортного средства.
Суть нового технического решения поясняется схемой и процессом преобразования известного лямбдаобразного механизма П.Л.Чебышева в кулачково-опорный механизм. На рис.1 показан известный лямбдаобразный механизм П.Л.Чебышева. Схема механизма приводится со ссылкой на исторический оригинал статьи П.Л.Чебышева [1] и на работу А.А.Скворцовой [2].
Рис. 1. Начало доработки известного механизма П.Л.Чебышева
Анализ этого механизма показывает, что удлинённый шатун ВЕ нужен только с единственной целью – обеспечить шагающую траекторию движения транспортного средства с опорой на рабочую концевую точку Е в самой верхней части механизма. Рабочий прямолинейный участок шагающей траектории также находится в верхней части механизма, то есть над корпусом транспортного средства, тогда как опора должна быть всегда под машиной. На защиту выносится следующий способ и устройство смещения рабочей шагающей траектории ниже корпуса машины.
Новое техническое решение – кулачковая опора
Наиболее актуальным является прямолинейный участок рабочей шагающей траектории, поэтому пояснения будут проведены со ссылкой именно на него, хотя всё сказанное справедливо также для верхнего дугообразного участка переноса опоры, то есть для пассивного движения.
Предлагается на шатуне ВЕ жёстко закрепить круг-опору, центр которого расположен в рабочей точке Е шатуна. Например, такой круг может быть изготовлен из металла и неразъёмно, сваркой соединён с шатуном ВЕ. Радиус круга-шатуна должен быть таким, чтобы все рычаги располагались в его внутренней области, то есть окружность должна обязательно проходить ниже шарниров О и D . Принцип работы круга-опоры следующий. Когда рабочая точка Е шатуна ВЕ движется по нижнему прямолинейному участку шагающей траектории, нижняя точка круга как мгновенный центр вращения тоже движется прямолинейно относительно корпуса машины, хотя круг совершает не только поступательное движение, но и вращательное. Опорная поверхность предполагается горизонтальной, поэтому радиус круга всё время будет перпендикулярен ей, при этом рабочая точка Е шатуна ВЕ всё время будет находится на высоте, равной радиусу круга-опоры, над опорной поверхностью. Вращательное движение круга-опоры не нарушит горизонтального перемещения корпуса механизма и машины, но внесёт некоторые возмущения в постоянную скорость поступательного движения транспортного средства. Отдельной задачей будет определение этих возмущений за счёт вращательного движения круга-шатуна.
Дальнейшая доработка механизма П.Л.Чебышева поясняется схемой, приведённой на рис.2. На этом рисунке показаны три схемы, то есть три этапа создания кулачковой опоры. Первая схема является самой важной, хотя и самой простой. Она показывает, как свойство круга можно применить для смещения рабочей шагающей траектории сверху вниз, то есть ниже корпуса машины.
Рис. 2. Процесс доработки шагающего механизма П.Л.Чебышева
Первый рисунок показывает, как надо жёстко и неразъёмно соединить опорный круг с шатуном с выполнением двух обязательных требований. Во-первых, центр круга-опоры должен находиться в рабочей точке Е шатуна. Во-вторых, радиус круга-опоры должен быть таким, чтобы корпус машины находился внутри круга. Естественно, сразу же появляется вопрос о размерах колеса, которое на схеме значительно превосходит размеры транспортного средства. Уменьшение размеров колеса-опоры показано на верхней схеме в правой части рисунка. Верхняя часть колеса-опоры не является рабочей, потому что никогда не касается опорной поверхности. Следовательно, верхняя часть колеса является пассивной, поэтому может быть удалена. Вместо полного круга к шатуну оказался жёстко присоединён круговой сектор. Угловая величина этого сектора определяется из условия гарантированного и достаточного касания всех точек окружности с опорной поверхностью. Эта угловая величина была определена опытным путём при испытаниях машины.
Принципиальное изменение механизма П.Л.Чебышева
Новизна предлагаемого технического решения заключается не только в добавлении круга-опоры, но и в значительном и принципиальном сокращении размеров лямбдаобразного механизма П.Л.Чебышева. Действительно, верхняя часть шатуна была необходима только для формирования и фиксации рабочей точки Е, двигающейся по шагающей траектории. Но после замены шатуна-отрезка на шатун-сектор необходимость в точке Е отпала, потому что траектория посредством радиуса круга сместилась вертикально вниз, а именно, ниже корпуса транспортного средства. Необходимость в верхней части шатуна отпала, поэтому шатун можно обрезать до шарнирного соединения с коромыслом. Такая доработка показана на нижней схеме в правой части рисунка. При этом круговой сектор можно значительно облегчить, соблюдая только три обязательных условия. Во-первых, жёсткое крепление этого нового звена к укороченному шатуну, шарнирно соединённому с кривошипом и коромыслом, то есть фактически – это шатун видоизменённой формы. Во-вторых, нижняя опорная окружность должна быть достаточной во время поступательно-вращательного перемещения относительно корпуса. В-третьих, центр опорной окружности должен находиться в воображаемой и уже конструктивно удалённой рабочей точке Е шатуна. Точка касания дуги нового шатуна с опорной поверхностью движется относительно корпуса машины по шагающей траектории. Следовательно, транспортное средство тоже будет перемещаться шагающим способом. Однако возмущение в равномерность поступательного движения будут внесены вращением шатуна относительно корпуса машины. Чем меньше радиус опорной окружности, тем меньше такие возмущения, поэтому радиус надо сделать минимально возможным для поднятия корпуса механизма над опорной поверхностью.
Изготовление новой шагающей машины
Для доказательства правильности предложенного технического решения была изготовлена действующая демонстрационная модель механизма и шагающая машина [4], фотография которой показана на рис.3. Эти модели показывают, как постепенно можно заменить длинный шатун в известном лямбдаобразном механизме П.Л.Чебышева на новый укороченный шатун с дуговой опорой. Демонстрационная модель позволяет определить минимальный размер дуги для постоянной опоры нового шатуна. По сути новый шатун является кулачком, а весь механизм представляет собой кулачковую опору.
Рис. 3. Общий вид собранной модели (кулачки развёрнуты)
На рис.3 показана шагающая машина с развёрнутыми кулачками-опорами. Кулачки были развёрнуты навстречу друг другу с целью проведения автономных испытаний и выяснения расположения опорной дуги. После прояснения этих вопросов две кулачковые опоры были развёрнуты и установлены в том же направлении, что и две другие. Задействованы только четыре лямбдаобразных механизма П.Л.Чебышева, а другие четыре свободны, оставлены для дальнейших исследований новой машины.
Регулировка новых кулачковых опор
На шагающей машине предусмотрены восемь лямбдаобразных механизмов П.Л.Чебышева. Пара таких механизмов соединяется с общим кривошипом. Следовательно, на новой машине можно установить восемь кулачковых опор. Большое количество опор нужно для устойчивого положения машины на четырёх опорах, когда другие четыре кулачка совершают пассивное движение переноса по верхней дуговой части траектории. Множество кулачковых опор потребовало синхронизировать работу механизмов. Так как первые кулачки были выпилены из фанеры толщиной 6 мм, то сразу было решено сделать запас деталей. На рис. 4 показаны изготовленные кулачковые опоры. Было изготовлено десять кулачковых опор.
Рис. 4. Кулачковые опоры из фанеры
На рис.4 хорошо виден принцип проектирования кулачковой опоры. Технологический прямоугольник для крепления кулачка к шатуну механизма направлен от края сегмента к центру окружности опорной дуги. Опорная дуга была получена при автономных испытаниях кулачковых опор. Крепление кулачковой опоры на шатуне лямбдаобразного механизма показано на рис.5.
Было доказано, что даже четырёх опор достаточно для устойчивого движения машины. Следовательно, другие четыре механизма стали пассивными, не задействовались, но были оставлены для дальнейшего изучения свойств и характеристик новой шагающей машины.
Рис. 5. Дополнение известного механизма кулачком-опорой
Следующей задачей стала синхронизация работы лямбдаобразных механизмов. На рис.6 показан первый вариант синхронизации работы лямбдаобразных механизмов. Это поперечная синхронизация.
Рис. 6. Пример синхронизации работы механизмов (поперечная)
1. Предложен новый способ преобразования известного шагающего механизма П.Л.Чебышева в кулачково-опорный механизм.
2. Впервые предложено обрезать шатун, отказавшись от ранее принципиально важной верхней его половины, формирующей рабочую опорную точку.
3. Предложена методика определения формы нового шатуна, одновременно являющегося кулачком-опорой шагающей машины.
4. Создана демонстрационная дидактическая модель нового механизма.
5. Недостатком предложенного механизма является наличие касательных напряжений во время движения, величина которых требует отдельного изучения.
6. Наличие вращательного движения шатуна-кулачка вызовет нарушение равномерности движения, но не нарушит поступательность. Все возмущающие воздействия – это предмет изучения в отдельной работе, как научно-исследовательской, так и опытно-конструкторской.
7. Созданы демонстрационный макет нового механизма и действующая модель новой шагающей машины, подтверждающие правильность гипотезы о работе новой кулачковой опоры.
Список литературы
Схема шагающего устройства всего с 1 движущим мотором.
Схема шагающего устройства всего с 1 движущим мотором.
Всем привет.
Недавно начали выпускать этот механизм - шагающая игрушка на радиоуправлении:
Есть видео первого прототипа:
У него есть еще такое устройство гигантских размеров, но он его никак не хочет закончить уже несколько лет:
Там все довольно просто.
Есть две трехточечные опоры которые один мотор умеет поднимать друг относительно друга. Ось перемещения у них не строго вертикальная а под некоторым углом около 15-20 градусов
Второй мотор может менять орентацию этой оси в горизонтальной плоскости.
WickedGoblin писал(а): Там все довольно просто.
Есть две трехточечные опоры которые один мотор умеет поднимать друг относительно друга. Ось перемещения у них не строго вертикальная а под некоторым углом около 15-20 градусов
Второй мотор может менять орентацию этой оси в горизонтальной плоскости.
Рисованной схемы нигде не найдешь, можно только разобрать и разместить здесь схему.
А еще можно попросить нарисовать человека, который в этом разобрался и выложить здесь. Вот и появится единственный на весь интернет рисунок.
Широкий писал(а): А схема кинематическая где? Не могу понять как 1 мотором можно ходить в любую сторону.
уже на форуме обсуждали, как он работает. лень искать. захотите, найдёте. вот одно из видео
Radist писал(а): А еще можно попросить нарисовать человека, который в этом разобрался и выложить здесь. Вот и появится единственный на весь интернет рисунок.
Что рисовать то.
Гораздо легче представить как это работает если взять не 6 ног, а 8
Надо представить что есть два стола и один меньше другого и меньший стоит внутр большого.
Так ведь столы могут и 3-ногие быть. . А на видео и картинках не видно, чтобы там один "стол" был меньше другого.
ЗЫ. Смешное название у темы - "Схема . " - а самой схемы-то и нету. О5 топик-стартер забыл знак вопроса поставить.
Ну не шагающий блин это механизм.
Шагание подразумевает два ключевых момента:
Индивидуальное управление каждой опорой-ногой
Индивидуальный радиус и длину шага для каждой опоры
ну и не плохо 3-ий момент указать
Наличие индивидуальной ОС от каждой опоры.
WickedGoblin писал(а): Шагание подразумевает два ключевых момента:
Индивидуальное управление каждой опорой-ногой
Индивидуальный радиус и длину шага для каждой опоры
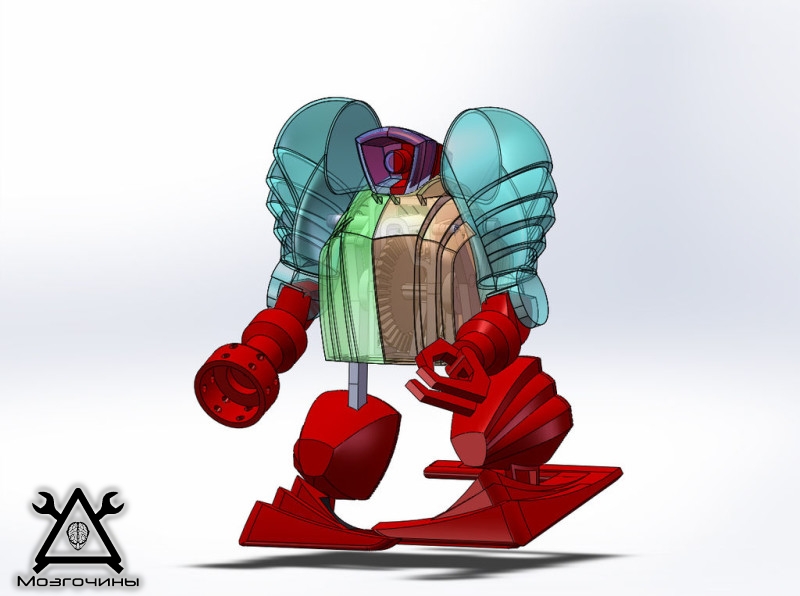
Я хочу показать вам, как сделать своими руками робота (разработанного мною), который может ходить и двигать руками. Для его создания я использовал 3D принтер и компьютер.
Это отличная работа, чтобы попрактиковаться в создании 3D моделей, в 3D печати и в аэрографии.
Шаг 1: Создание модели и печать
С помощью программы Solidworks я разработал модель и механизм робота. В программе вы можете свободно просматривать угодные вам детали.
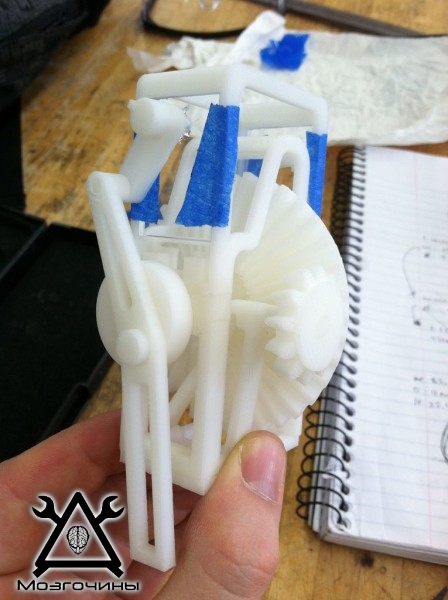
Что касается печати, я советую вам сначала напечатать внутренние части робота (механизм, шестерёнки). Вам, скорее всего, понадобиться обработать детали мелкой наждачной бумагой, чтобы всё подходило идеально, но всё зависит от принтера и его настроек.
Шаг 2: Обработка
Чтобы поверхность напечатанной детали была глянцевой, её можно слегка обработать грунтовкой.
Шаг 3: Грунтование и шлифование
Для нанесения грунтовки мною был использован распылитель. Используя высокое давление распылителя, нужно нанести высокоструктурированную грунтовку (лучше всего автомобильную и хорошего качества) на внешние части нашего изделия. После высыхания грунтовки, нужно обработать покрытые детали наждачной бумагой (начиная с 220 и заканчивая 600). Когда вы закончите обрабатывать, ваша модель будет выглядеть следующем образом.
Шаг 4: Покраска
После того, как вы отшлифовали все части, можно приступать к покраске. Аэрограф идеально подойдёт для покраски робота, но если у вас его нет, вы можете воспользоваться кисточками, но попытайтесь красить ровный слоем. Будьте изобретательны – покрасьте робота в “свои” цвета (у вас же должна быть фантазия).

Я использовал белую краску (для основания), перламутровую и оранжевую краску. Детали не были покрыты, ни какими лаками.
Шаг 5: Сборка
После высыхания всех окрашенный частей, вы можете приступить к сборке. Убедитесь перед финальной сборкой и склеиванием, что вся механика работает без проблем.
После сборки у вас получится великолепный двигающий руками и ногами робот, которого можно подарить ребёнку на день рождения или оставить себе).
Коммуникативный педагогический тренинг: способы взаимодействия с разными категориями учащихся
Сертификат и скидка на обучение каждому участнику

Муниципальное общеобразовательное учреждение – Гимназия №1
ТЕМА: «ШАГАЮЩИЕ МЕХАНИЗМЫ
Зонов Артём Михайлович
Дацко Елена Владимировна
Должность: учитель математики
г. Клин, 2015 год
1. Биография русского математика и механика П.Л.Чебышева 5-6
2. Многообразие механизмов, изобретённых П.Л. Чебышевым 6-8
4. Моё изобретение – макет стопоходящей машины 10-12
Список использованной литературы 14
Герберт Уэллс, английский писатель и публицист
Шагающие машины не сказка, и не выдумка из жанра научной фантастики. Вам кажется, что это дело далёкого будущего, а на самом деле первое в мире такое механическое чудо изобрёл русский математик П.Л. Чебышев в то время, когда в России появилась первая мартеновская печь, а Пржевальский только отправился в свою экспедицию. Это была вторая половина XIX века. Много лет Пафнутий Львович увлекался изобретением плоских шарнирных механизмов и придумал их несколько десятков.
С одной стороны их работа противоречит законам физики. Каким образом достаточно мощный моторчик, который всегда вращается в одну сторону и не может быстро менять направление движения, заставляет работать дворники? В этом ему помогают специальные реечки, преобразующие равномерное вращение оси в круговые движения – это и есть плоский шарнирный механизм.
Математик Пафнутий Львович Чебышев первым стал исследовать шарнирные механизмы с помощью математики. Он разработал новые направления науки – теорию приближения функций и теорию синтеза механизмов [4].
В работах Чебышева собрано много уникальных идей, что даёт ему право считаться одним из лучших представителей математической школы. И в наше время труды Пафнутия Львовича уникальны и актуальны. Во многих странах продолжается их развитие. Это доказывает актуальность выбранной мной темы.
Цель данного проекта заключается в изучении истории создания математических открытий Чебышева, изменивших ход развития науки. Для достижения поставленной цели требуется выполнить ряд следующих задач :
1. Познакомиться с биографией П.Л.Чебышева.
2. Изучить многообразие механизмов, изобретённых П.Л. Чебышевым.
3. Обобщив все полученные знания, согласно чертежам Чебышева повторить его изобретение – создать свой макет стопоходящей машины.
Объектом изучения данного проекта являются научные открытия П.Л.Чебышева. Предметом изучения выступает значение данных открытий для науки и повседневной практики.
Проектная работа состоит из введения, четырёх глав и заключения. В первой главе рассказывается о биографии великого российского учёного. Во второй главе описывается многообразие изобретённых им механизмов. В третьей главе рассматривается история создания стопоходящего механизма и практическая роль применения его в современной жизни. И в заключительной главе поэтапно описывается процесс самостоятельного создания макета стопоходящей машины.
Итогом проектной работы является создание собственного макета стопоходящей машины.
1. Биография русского математика и механика П.Л. Чебышева

Рис. 1. Пафнутий Львович Чебышев (1821-1894)
Жизнь великого русского учёного подобна его изобретениям – проста и удивительна. Родился он 26 мая 1821 года, в селе Акатове Калужской губернии Боровского уезда, в имении своей матери [4].
Вспоминая детство, Чебышев любил рассказывать о своей учительнице музыки, которая, не научив музыке, приучила его к точности и анализу.
Чебышев с детства прихрамывал, и ему приходилось пользоваться тростью. Это и помешало ему стать офицером, чего он очень хотел, так как был из семьи потомственных военных.
Юноша получил дома первоначальное образование. И пусть он не учился ни в одном из средних учебных заведений, легко сдал экзамен в Московский университет.
В то время, когда Европа слушала Шопена, Россия жадно ловила каждое Пушкинское слово, были изобретены серные спички, а Шампольон расшифровал египетские иероглифы, Пафнутий Львович продолжал прилежно учиться и в двадцать лет окончил университет, а к двадцати пяти годам защитил в университете диссертацию на степень магистра по теме теории вероятностей. На следующий год Чебышев переехал в Петербург, так как он был приглашён работать на кафедру Петербургского университета. Там он стал профессором, где отдал работе много сил и посвятил себя научной работе до последних минут своей жизни.
8 декабря 1894 утром за работой, Чебышев скончался за своим письменным столом. Днём ранее он обсуждал с учениками планы своих работ и узнавал о темах их самостоятельного творчества.
2. Многообразие механизмов, изобретённых П.Л. Чебышевым
Для своей эпохи П.Л. Чебышев был настоящим новатором науки и техники, подарив миру такое разнообразие открытий и изобретений.
Чебышев в поездке в Лиллу внимательно изучил местные ветряные мельницы и усовершенствовал форму их крыльев. Не обошёл вниманием и паровую машину Дж. Уатта – небольшие, казалось, изменения значительно улучшили данный механизм.
Учёный, наблюдая за походкой животных, построил модель стопоходящей машины (См. Рис. 2). Создал самокатное кресло, гребной механизм, сортировальную машину, арифмометр (См. Рис. 3). Но не всё из созданного и построенного Чебышевым нашло практическое применение. Многое осталось невостребованным. Первую счетную машину непрерывного действия – изобретателю пришлось подарить музею искусств и ремёсел в Париже [4].


Рис. 2. Макет стопоходящей машины
Рис. 3. Арифмометр
Тесная связь теоретических вопросов с практикой, наибольшее внимание к фундаментальным проблемам теории механизмов, самостоятельность от других направлений и школ – отличительная черта русской школы науки. Не все идеи академика были признаны современниками и продолжателями. Но научное направление, созданное под руководством Пафнутия Львовича, было важным и определяющим для развития всей русской математической школы [3].
3. Стопоходящая машина – исток современной робототехники
Природа создала бесконечное количество конструкций ног. Каких здесь только нет! Ноги, обеспечивающие высокую скорость передвижения. Ноги, пригодные для движения по песку, снегу, болоту; ноги для прыжков, опорные ноги и ноги толкатели, ноги, с помощью которых можно взбираться на гладкую стену и ходить по потолку.
В конструкции органов передвижения человек сделал весьма принципиальное изобретение, которому могла бы позавидовать сама природа. Это изобретение – колесо . И что наиболее важно – в изобретении колеса человек не копировал природу, а шёл своим самобытным путём [2].
Рассматривая историю развития транспортных колёсных средств за много веков, мы думаем, что шаговый принцип передвижения наиболее примитивный и неинтересный для современного технического века. Мы привычно думаем, что колесо эффективнее ног. Но использовать колёса хорошо только на ровной, твёрдой и гладкой поверхности. К сожалению, в природе это встречается не часто.
Колёса на мягкой почве беспомощны, машины, застрявшие в грязи, становятся бесполезными.

Рис. 4. Стопоходящая машина Чебышева
Выходит, что бабушкой нынешних японских роботов можно с полной уверенностью считать стопоходящую машину.
Сейчас шагающие роботы разрабатываются для различных практических целей. С их помощью исследуют морские глубины. Они особо необходимы в сложных условиях техногенных катастроф, для аварийно-спасательных работ.
И на службе в армии роботы нашли широкое применение – сапёры, разведчики, носильщики.
4. Моё изобретение – макет стопоходящей машины
Всё гениальное просто только на первый взгляд. Приступая к созданию собственного макета стопоходящей машины, я и не предполагал о тех трудностях, с которыми пришлось столкнуться.
Внимательно изучив чертежи механизма Чебышева и компьютерную 3-D модель, созданную по заказу Политехнического музея, я приступил к работе.
В результате для создания макета мною были использованы: пластиковая пластина, болты и шпильки с самоконтрящимися гайками, заклёпочник (для усиления узлов рычагов), лобзик, линейка, карандаш и, конечно же, схема будущего стопоходящего механизма (См. Рис. 5).

Рис. 5. Используемые приборы и материалы

Рис. 6. Механизм в процессе создания


Рис. 7. Собранные мной модели стопоходящих машин
Самое интересное, что я начал вам рассказывать историю с конца. На самом деле всё началось с того, что бесконечно совершенствуя собранных из конструктора роботов, меня заинтересовало, каким образом один моторчик двигает сразу четыре ноги. Простая игрушка открыла для меня целый мир удивительных открытий великого русского учёного Пафнутия Львовича Чебышева, которые заставили меня взглянуть на математику с совершенно другой стороны. И пусть пока я постигаю тонкости геометрии с помощью игрушек, уже сейчас мне ясно – математика будет со мною рядом всю жизнь!
Обобщив все полученные знания, согласно чертежам Чебышева я сумел повторить одно из его изобретений – создал свой макет стопоходящей машины. Уже сейчас я понимаю, как сложна профессия конструктора. Но в то же время она крайне увлекательна, и именно поэтому свою дальнейшую жизнь я бы хотел связать возможно с ней.
Читайте также: