
Самобалансирующийся куб своими руками
Добавил пользователь Дмитрий К. Обновлено: 19.09.2024
Баланс-борд (ундо-борд) - популярный в последнее время как у молодежи и детей, так и у взрослых спортивный тренажер. Представляет он собой доску и ролик, на который первый элемент и ставится. Баланс-бордисты подолгу удерживают равновесие на этом устройстве, делают на нем зрелищные трюки. Умение балансировать не только поможет удержаться на ногах в переполненном транспорте или пройтись, не падая, по узкому бордюру, но и здорово отразится на ваших навыках, если вы занимаетесь, например, серфингом, велоспортом, катаетесь на скейте, лонгборде или сноуборде. Сделать же свой первый баланс-борд своими руками вы легко сможете, прочитав эту статью.
Доска: обратите внимание
Если вы хотите получить в итоге своей работы качественный, удобный и долговечный тренажер, то нужно ответственно подойти к выбору материалов. Самым важным и главным из них будет доска. Перед тем как сделать баланс-борд своими руками, обратите внимание на следующее:
- Лучший материал для доски - влагостойкая и качественная фанера толщиной 12-15 мм. Большинство профессиональных мастеров останавливаются на березовой.
- Стандартная длина баланс-борда - 75 см. С шириной каждый определяется по своему вкусу - от 35 до 45 см.
- Форма доски может быть самой разнообразной - главное, чтобы вы чувствовали себя на ней комфортно и удобно. Самые популярные - это эллипс, "яйцо", "ласточкино гнездо".
- На первых порах вам наверняка понадобятся стопперы - ограничители для ролика внизу доски. Профессионалы обходятся без них - считают, что стопперы более мешают тренировкам, чем оберегают от падения. На всякий случай поставьте стопперы не на суперклей, а на саморезы - вы всегда сможете их открутить, если надобность в этих элементах отпадет.

Труба: важное
Чтобы сделать ролик-валик для баланс-борда своими руками, нужно определиться, что же может им быть. Некоторые спортсмены не заморачиваются - берут старую доску от скейта, наполняют обычную пластиковую бутылку водой - и вуаля! Кто-то для этих целей использует природный материал - обрубок круглого бревнышка.
Однако для правильного ундо-борда все же лучше использовать металлическую трубу. Не нужно лениться отшлифовать ее острые края. Самый оптимальный диаметр для вашего будущего тренажера - 110-170 мм.
После того как вы определились с лучшими для себя вариантами материалов, самое время перейти к изготовлению баланс-борда своими руками. Инструкцию мы представим на ваш выбор в трех вариантах.

Метод первый
Вам будут нужны:
- фанера;
- полиэтиленовая труба;
- два вида "наждачки" - крупнозернистая и мелкозернистая;
- лобзик;
- саморезы (35 мм);
- столярный клей;
- отвертка;
- лак или краска;
- маленькая малярная кисточка.

Начинаем делать баланс-борд своими руками:
- Начертите на фанере контур своего будущего тренажера - используйте в качестве шаблона подручные материалы, баланс-борд друга или же примените школьные знания геометрии.
- Строго по контуру выпилите лобзиком фигуру.
- Обязательно надев защитные перчатки, тщательно зашлифуйте доску - сначала крупной, а затем мелкой "шкуркой".
- Из оставшихся кусочков фанеры выпилите стопперы. Прикрутите их к нижней стороне доски саморезами.
- На этом этапе вам нужно скрупулезно закрасить или покрыть лаком свое творение. Старайтесь использовать нескользкие матовые красители. Как вариант - покройте верхнюю часть тонким слоем клея и засыпьте ее равномерным слоем мелкого, просеянного через сито песка.
- Последнее дело - ролик. Его надо отпилить от трубы и также зашлифовать. При отсутствии такого элемента можно воспользоваться обрубком черенка от лопаты, скалкой или, на худой конец, пластиковой бутылью, наполненной водой.
Метод второй
Баланс-борд своими руками можно сделать и несколько иначе:
- Сделайте в Paint или любом другом редакторе шаблон. Распечатайте изображение и перенесите на доску. По контуру выпилите баланс-борд, зашлифуйте "наждачкой" все неровности.
- Выпилите ограничители. Вместо саморезов стопперы можно также присоединить к доске шпильками из пневмопистолета.
- Не используйте для ролика хрупкую канализационную трубу. Самый лучший вариант - ПНД или асбестовая труба. Наждачной бумагой также сгладьте все неровности. Некоторые дополнительно обрабатывают ролик парафином.
- Если вы боитесь, что трубка может прогибаться под вами, по ее внутреннему диаметру вырежьте две деревянные заглушки.
- На этом этапе окрасьте и доску, и трубу в свой любимый цвет. Это не только придаст им эстетичный вид, но и защитит от скорой порчи.

Метод третий
Самый простой способ сделать баланс-борд своими руками:
- Раздобудьте старый скейт, освободите его от всего лишнего, чтобы в итоге осталась одна доска.
- Возьмите соответствующие ширине доски планки-рейки, прикрутите их к ее низу шурупами - сделайте стопперы.
- Теперь время поиска нужного отрезка трубы. Если вы не нашли ничего, кроме канализационной, то добавить ей жесткости поможет помещенная вовнутрь бутылка с водой. На этом все!
Популярный и полезный для ножных мышц баланс-борд вполне возможно смастерить самостоятельно. Трудности вызывает только поиск подходящих материалов.

Однажды китайский инженер Чжи Хуэй Цзюнь ехал на велосипеде на работу, упал и здорово проехался лицом по асфальту. День был испорчен, лицо саднило, а любимые им велопрогулки отныне потеряли изрядную долю очарования. Но технарь — на то и технарь, чтобы не страдать, а действовать.
Спустя 4 месяца инженер создал самобалансирующийся велосипед, на котором сможет ездить даже тот, кто в жизни не садился на обычный велик.
Чжи Хуэй Цзюнь трудился над этим проектом в свободное от основной работы время. Он вдохновился беспилотным велосипедом, который создали конструкторы из Пекинского университета Цинхуа еще в 2019 году. Однако инженер-одиночка решил придумать все самостоятельно, не опираясь на чужие разработки.
В его велосипеде используется продвинутая система акселерометров и гироскопов, способных отслеживать малозаметные движения велосипеда и корректировать их.
Самобалансирующийся велосипед оказался настолько хорош, что держит вертикальное положение практически идеально. Он может сохранять равновесие как в неподвижном состоянии, так и в движении. Даже если повесить на руль тяжелый груз, например кирпич, велосипед не отклонится в сторону.

Однако Чжи Хуэй Цзюню было мало и этого. Он также оснастил свой велосипед камерой с датчиками, которые позволяют ему избегать препятствий на пути. Иначе говоря, это практически идеальный велосипед: если дать ему ИИ, то он станет полноценным беспилотным устройством. Единственная слабость изобретения — оно работает за счет литиевой батарейки, и если та сядет, ездок рискует повторить кульбит инженера с падением лицом в асфальт.
Чжи Хуэй Цзюнь окончил Китайский университет электронных наук и технологий в 2018 и с тех пор участвует в программе Huawei Young Genius. Он работает над созданием ИИ в компании-производителе смартфонов Oppo, а в свободное время развлекает себя изобретательством. На своем YouTube-канале молодой инженер показывает примеры собственного творчества: от пауэрбанков с цветным дисплеем до небольших роботов.

Как сделать балансборд своими руками
Инструменты и материалы:
- Картонная втулка от ковролина, плёнки или других материалов;
- Фанера 20 мм толщиной (или 10 мм);
- Фанера толщиной 16 мм;
- Саморезы;
- Клей ПВА;
- Акриловый лак на водной основе;
- Электролобзик;
- Фрезер;
- Шуруповёрт;
- Наждачная бумага;
- Валик.
Как сделать балансборд, пошаговая инструкция:
Сначала я взял толстую водопроводную толстостенную трубу, чтобы использовать в качестве валика для балансировочной доски но она оказалась не идеально круглого сечения, была овальной. Затем попалась на глаза картонная втулка – катушка на которую наматывается плёнка или ковролин, толщина стенки у такой втулки 8 мм, это оказалось достаточно для прочности.

Как сделать балансборд своими руками

Как сделать балансборд своими руками
Затем я пропитал её хорошенько лаком, она стала ещё более прочной и влагозащищённой.
У меня дома нашлась фанера толщиной 10 мм длиной 1,5 м, я отрезал на всю её длину полосу шириной 38 см. Разрезаем полосу теперь пополам, чтобы получилось 2 одинаковых прямоугольника.
Нанесём на одну сторону каждой их досок столярный клей ПВА, размажем по всей поверхности и склеим их вместе. Сверху для качественного склеивания положил ещё один лист фанеры на который поставил тяжёлые вещи. Теперь нужно дать высохнуть клею, оставим примерно на сутки.

Как сделать балансборд своими руками

Как сделать балансборд своими руками

Как сделать балансборд своими руками
Теперь у нас получилась доска толщиной 20 см и её уже не сломать. Теперь нужно сформировать форму будущего балансборда. Для этого я с каждой из сторон (короткие стороны) отступил по 30 мм и провёл линию к центру доски (отступив от центра по 10 см), а дальше скруглил края, очертив крышку от банки краски. А затем прошёлся по отчерченому контуру электролобзиком.

Как сделать балансборд своими руками
Затем балансировочную доску зашлифовал со всех сторон наждачной бумагой с зерном 180, это я сделал с помощью шлифмашинки но можно это сделать и вручную.

Как сделать балансборд своими руками
С двух сторон доски отмериваем по 75 мм, сюда будем приклеивать по куску фанеры толщиной 16 мм. Дополнительно для крепости соединения я вкрутил в них по 2 самореза.

Как сделать балансборд своими руками
Снимем фаски с обоих сторон доски, я это делаю с помощью фрезера, можно это сделать с также помощью напильника, я им обработал те края куда не достала фреза фрезера. Теперь зашлифуем края дополнительно наждачной бумагой, чтобы они стали гладкими.

Как сделать балансборд своими руками
Нижнюю часть доски балансборда я покрыл лаком, а вот на фронтальную часть я буду сперва наносить рисунок, на нашем сайте мы показывали уже способ как перенести изображение на дерево. Коротко опишем как я это делал.
Для начала я распечатал картинку с изображением автобуса и вырезал по его контуру, затем взял акриловый лак на водной основе и намазал его на изображение и отложил в сторону. Теперь тем же лаком покрыл всю верхнюю поверхность доски толстым слоем.

Как сделать балансборд своими руками

Как сделать балансборд своими руками

Как сделать балансборд своими руками
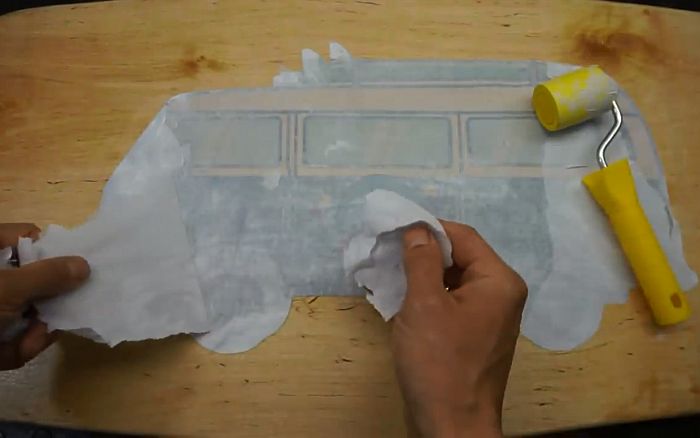
Накладываем картинку автобуса на покрытую только что лаком поверхность изображением к доске и хорошо приглаживаем валиком.

Как сделать балансборд своими руками
Теперь когда подсохнет немного отрываем аккуратно бумагу, верхний её слой и оставляем на время пока лак полностью высохнет. Затем смачиваем оставшуюся бумагу водой, это можно сделать кисточкой или мокрой губкой и начинаем скатывать бумагу пальцами, можно также это делать тряпочкой, сначала верхний слой постоянно смачивая дополнительно водой.
Как сделать балансборд своими руками

Как сделать балансборд своими руками
Так доводим до такого состояния пока бумаги совсем не останется, а будет хорошо и отчётливо просматриваться изображение.

Как сделать балансборд своими руками
Осталось покрыть поверхность вместе с перенесённым изображением лаком и балансборд сделанный своими руками готов!

Допустим, вы двигаетесь на велосипеде, и вдруг кто-то толкает вас сбоку. Чтобы быстро восстановить равновесие и избежать падения, вы повернете руль велосипеда в направлении толчка. Велосипедисты делают это рефлекторно, но удивительно, что велосипед может выполнить это действие самостоятельно. Современные велосипеды могут самостоятельно удерживать равновесие даже при движении без управления. Посмотрим, как этот эффект можно смоделировать в COMSOL Multiphysics.
Что мы знаем о самобалансировании велосипедов
Современный велосипед не очень сильно отличается от безопасного велосипеда — одной из первых конструкций, появившейся в 80-х годах XIX века. По прошествии более ста лет ученые все еще пытаются выяснить, за счет каких эффектов велосипед становится самобалансируемым. Другими словами, как неуправлемый велосипед сохраняет равновесие в вертикальном положении? Описанию движения велосипеда с помощью аналитических уравнений посвящено множество опубликованных работ. Одной из первых важных публикаций по этой теме была статья Фрэнсиса Уиппла, в которой он получил общие нелинейные уравнения динамики велосипеда, управляемого велосипедистом без использования рук.
Принято считать, что устойчивость велосипеда обеспечивается двумя факторами — гироскопической прецессией переднего колеса и стабилизирующим действием продольного наклона оси поворота колеса. Совсем недавно команда исследователей из Делфта и Корнелла (см. ссылку №3) опубликовала всеобъемлющий обзор линеаризованных уравнений движения для модели велосипеда Уиппла. Они использовали свои результаты для демонстрации самобалансирующегося велосипеда. Их исследование показывает, что этому явлению нельзя дать простое объяснение. Сочетание факторов, в том числе гироскопического и стабилизирующего эффектов, геометрии велосипеда, скорости и распределения массы позволяет неуправляемому велосипеду сохранять вертикальное положение.
Вдохновившись этой работой, мы построили динамическую модель многотельной системы, чтобы продемонстрировать самобалансирующееся движение велосипеда, управляемого велосипедистом без помощи рук.

Положение велосипеда в разные моменты времени.
Многотельная модель велосипеда
Эта учебная модель рассчитывает динамику движения велосипеда, управляемого велосипедистом без помощи рук, на плоской поверхности при воздействии поперечной силы, вызывающей отклонение от прямолинейного движения. Мы продолжили исследование, чтобы проанализировать, как велосипед самобалансируется при различных величинах скорости и наклона оси.
Чтобы построить модель велосипеда, сделаем следующие допущения:
- Все компоненты считаются жесткими.
- Трение во всех шарнирах не учитывается.
- Колеса велосипеда моделируются в предположении касательного контакта с землей.
- К колесам приложены ограничения на вращение.
- Предполагается, что велосипед двигается по плоской поверхности.
- Предполагается, что велосипедист не использует руки для управления велосипедом, что задано путем увеличения массы на задней раме.
Велосипед состоит из четырех жестких компонентов — заднего колеса, задней рамы, объединенной с велосипедистом, передней рамы с рулем и переднего колеса. Хотя колеса имеют конечную толщину, будем считать, что они имеют точечный контакт с землей. Задняя часть рамы и заднее колесо соединены с помощью шарнира. Еще один шарнир соединяет две части рамы. Ось этого шарнира формирует рулевую ось велосипеда. Третий шарнир соединяет переднее колесо и переднюю часть рамы.

Геометрия велосипеда в COMSOL Multiphysics.
Геометрия велосипеда, используемая в этой модели, показана выше. Инерционные свойства компонентов велосипеда определяются массой, моментом инерции и положением центра масс. Важными геометрическими параметрами являются радиус колеса, колесная база (wb) и направление оси наклона (st). Наклон рулевой оси контролирует уход вилки переднего колеса (c).

Схема велосипеда.
Как упоминалось ранее, считается, что велосипед катится по поверхности. В случае чистого качения, скорость в точке контакта с землей равна нулю. В этой модели вращение колеса реализовано без использования каких-либо контактных взаимодействий для уменьшения вычислений. Вместо этого мы используем альтернативные подходы динамики многотельных систем для моделирования движения. Чтобы описать отклонение от курса, наклон и вращательное движение колеса, создаются три соответствующие безынерционные связи. Мы задаем три ограничения по проскальзыванию, чтобы ограничить проскальзывание колес в прямом направлении, в поперечном направлении, и перпендикулярно поверхности контакта. Так как зафиксировать скорость не представляется возможным, мы введем ограничение перемещения.
Ниже мы расскажем, как задается это ограничение. Более подробно это условие описано в учебной модели вращения жесткого колеса.

Чтобы обеспечить чистое качение колес и ограничить их проскальзывание в трех направлениях, нам нужны три граничных условия.
Модель колеса с отображением направлений, в которых ограничены перемещения.
Используются следующие ограничения: Отсутствие проскальзывания в прямом направлении:
Отсутствие проскальзывания в поперечном направлении:
Отсутствие проскальзывания перпендикулярно поверхности контакта с землей:
где \bold_ , \bold_ , and \bold_ — мгновенное направление (наклонная ось), поперечное направление (ось вращения) и нормаль к поверхности контакта (\bold_=\bold_ \times\bold_) , соответственно;
\frac> — поступательная скорость движения; r — радиус колеса; \frac_> — угловая скорость вращения; \frac_> — угловая наклонная скорость.
Поскольку применить указанные граничные условия к скорости невозможно, они дискретизируются во времени и накладываются следующим образом:
где \bold_
, \bold_ и \bold_ — это вектор смещения, угол вращения и наклона в предыдущий момент времени, соответственно.
В дискретных граничных условиях, обеспечивающих отсутствие проскальзывания, используется результат расчета положения колеса на предыдущем шаге по времени. Положение жесткого тела, вращение и мгновенные положения осей на предыдущем шаге по времени сохраняются с помощью глобальных уравнений и узла Previous Solution в нестационарном решателе.
Моделирование движения самобалансирующегося велосипеда
Для анализа мы выбрали велосипед, угол наклона руля которого составляет 18°. Начальное значение скорости велосипеда составляет 4.6 м/с. Через 1 секунду после начала движения на велосипед в течение очень короткого периода времени воздействует сила 500 Н. Под действием силы велосипед отклоняется от прямолинейной траектории движения в заданном направлении.
В течении первой секунды велосипед движется вперед вдоль первоначально заданного направления с постоянной скоростью. Затем боковое усилие вызывает отклонение. Отметим, что велосипедист не держит руки на руле и не может управлять балансом велосипеда. Что происходит дальше? Мы можем заметить, что как только велосипед начинает наклоняться, руль поворачивается в направлении падения. Корректировка положения руля при падении приводит к восстановлению равновесия велосипеда.
Велосипед продолжает двигаться вперед, и в процессе движения начинает наклоняться в обратную сторону. Этот наклон меньше по величине, а движение руля точно следует за наклоном с небольшим отставанием. Такое колебание вправо-влево продолжается и в конечном итоге затухает. Велосипед движется вперед в строго вертикальном положении и слегка увеличивает скорость. Колебания руля, углы поворота и угловая скорость постепенно снижаются и затухают.
Движение велосипеда на ровной поверхности при отклонении от прямолинейного движения. Стрелка показывает наклон велосипеда.


Результаты расчета углов наклона и поворота руля (слева) и относительная угловая скорость (справа) велосипеда.
Проведение анализа устойчивости
Таким образом, мы узнали, что велосипед может самобалансироваться. Исследование показало, что невозможно выделить какой-то один параметр, определяющий устойчивость велосипеда. Конструкция велосипеда, распределение массы и скорость движения — все эти факторы влияют на устойчивость. Чтобы лучше понять это явление, мы провели дополнительный анализ для изучения влияния двух параметров — начальной скорости и наклона рулевой оси. Мы использовали описанную выше модель велосипеда с углом наклона оси руля 18° и начальной скоростью 4.6 м/с в качестве исходной конфигурации и провели параметрический анализ влияния этих двух факторов.
Различные значения начальной скорости
Велосипед не может оставаться в строго вертикальном положении, когда стоит на месте. Мы изменяли скорость движения от 2.6 м/с до 6.6 м/с с шагом 1 м/с, чтобы оценить влияние этого параметра. В диапазоне 2.6–3.6 м/с велосипед наклоняется слишком сильно и неустойчив. На скорости 5.6 м/с скорость наклона стремится к нулю, но сам угол наклона приобретает ненулевое значение. Хотя данная конфигурация устойчива, велосипед будет двигаться по кругу с небольшим наклоном. На 6.6 м/с наклон и угол поворота руля увеличиваются со временем, делая движение неустойчивым.
| Неустойчивое | Устойчивое | Неустойчивое | ||
|---|---|---|---|---|
| 2.6 м/с | 3.6 м/с | 4.6 м/с | 5.6 м/с | 6.6 м/с |


Устойчивый случай соответствует скорости 5.6 м/с (слева), а неустойчивый — скорости 6.6 м/с (справа).
Угол поворота руля
Узел рулевого управления очень важен для самобалансировки велосипеда. Если велосипедом невозможно управлять (например, если руль заклинило), то велосипед не сможет компенсировать наклон, поэтому он в итоге упадет. В этой связи, поворот оси руля, который контролирует уход вилки, также влияет на самобалансировку велосипеда.
Чтобы проанализировать влияние поворота оси руля на устойчивость велосипеда, мы изменяли углы поворота руля от 15° до 21° с шагом 1°. При угле в 15° наклон и угол поворота руля увеличиваются со временем, что делает данную конфигурацию неустойчивой. Велосипед устойчив в диапазоне от 16° до 19° и неустойчив для больших углов. При значениях поворота больше 19°, наклон и угол поворота колеблются, и эти осцилляции со временем возрастают, что приводит к потере устойчивости.
| Неустойчивое | Устойчивое | Неустойчивое | |||||
|---|---|---|---|---|---|---|---|
| Наклон | 15° | 16° | 17° | 18° | 19° | 20° | 21° |
| Уход вилки | 0.066 м | 0.0706 м | 0.0753 м | 0.08 м | 0.0848 м | 0.0896 м | 0.0945 м |


Два случая неустойчивости с поворотом в 15° (слева) и 21° (справа).
Заключительные замечания по использованию анализа многотельной динамики для изучения самоустойчивости велосипеда
В этой публикации мы рассказали, как смоделировать движение неуправляемого самобалансирующегося велосипеда с помощью модуля Динамика многотельных систем (Multibody Dynamics) в COMSOL Multiphysics. Мы продемонстрировали, как реализовать ограничения на проскальзывание на жестком колесе через уравнения, а затем объединили эти ограничения с многотельной моделью велосипеда. Затем мы проанализировали влияние начальной скорости и поворота оси на устойчивость велосипеда. Оценив эти параметры, мы увидели, что велосипед может сохранять устойчивость в одной конфигурации и терять ее в другой.
Самобалансировка велосипеда является следствием целого ряда факторов. С помощью нашего анализа и в соответствии с предыдущими исследованиями мы продемонстрировали, что устойчивость велосипеда связана с его способностью "подруливать" в направлении наклона.
Читайте также: