
Робот собака на ардуино своими руками
Добавил пользователь Владимир З. Обновлено: 04.10.2024
В этом видео я вам покажу, как собрать простого робота на Arduino UNO, который может объезжать препятствия. ▻ Купить .
Делаем робота на основе Arduino из трактора King Force 300 Исходный код прошивки этого робота для Arduino Nano .
В этом видео вы увидите вездеход, который я сделал своими руками на Ардуино. Маленький луноход. 00:50 - Общий .
Решил вот попробовать собрать простейшую схему радиоуправления для машинки на основе китайского пульта и .
Качай Быстрый Поиск и Браузер для Android и iPhone bit.ly/2P2IpJm. По промо-коду GYVER получи доступ ко ВСЕМ .
Занимательная робототехника. Робот своими руками собран из фанеры, сервопривода SG90 и arduino. Поскольку это .
В этом видео вы увидите вездеход, который я сделал своими руками на Ардуино. Маленький луноход. Список .
Купить arduino робот: ali.pub/24xxfc. Программа для управления роботом: yadi.sk/i/xO6Ixue8r6Y2J Группа в ВК: .
Как сделать кран(руку) манипулятор своими руками маленьких размеров? Создание подобного проекта очень .
Делаем собаку-робота. Подробная сборка, калибровка и настройка. Делаем первые шаги и гуляем по улице. Программное .
Привет друзья я робот 013 мою строительство наконец-то завершено и я с радостью вожусь в эксплуатацию я могу ходить .
SPECIAL. SpotMini от Boston Dynamics это кончено очень круто, но начнем мы с чего нибудь по проще В этом видео мы .
В этом ролике я решил собрать робота паука на Arduino, который будет управляться через смартфон по Bluetooth.
В этом выпуске вы узнаете: какие модули и компоненты для создания роботов можно купить на али экспресс; что нужно .
Мало в ютубе русскоязычных роликов про балансирующего робота и как его сделать, поэтому решил сделать свой .

ЧУДО психоанализа: заработать на модных профессиях не прочь даже бывший священник

Миллион долларов за селфи: индонезиец удачно продал архив университетских фото

В Балашове подростки заставили школьника на коленях целовать ботинки

Виртуальное исследование японской подлодки, которая затонула в 1942 году

Подсмотрено в ЗаМКАДье, или Житейские хитрости для комфортной жизни

Черный рынок, кошачий “спецназ” и медицина: необычные факты о блокадном Ленинграде
Как выглядели бы известные исторические личности сегодня

Похороненные Google: выживет ли новый проект корпорации Project Iris

Женщина быстро и эффектно потушила свой загоревшийся смартфон


В Татарстане водитель отказался убирать свою машину ради скорой с ребенком

Туры по льду Байкала пользуются ажиотажным спросом

"Да они совсем уже обалдели?": девушка сравнила цены на горнолыжных курортах Турции, Грузии и России


"Щедрый, без детей, зарплата больше сотки": каких мужчин ищут девушки в интернете

Причудливые и абсурдные картинки, претендующие на звание "Мем года"

15 искренних изображений, которые как раз то, что нужно в холодный день

В Саратове пенсионерка невозмутимо шла по рельсам, не пропуская трамвай

2000-е в России: редкие кадры того неоднозначного времени

25 преступлений против хорошего вкуса, совершенных дизайнерами интерьера

Поездка со вкусом: поезда прошлого и современности, способные удивить


Старшеклассница в гимназии решила снять пранк, но учитель шутки не оценила
Миролюбивые чистюли, а не кровожадные монстры: мифы и заблуждения о викингах

В Воронеже религиозный водитель автобуса возмутил молчаливого пассажира



Московских окон негасимый свет - теперь на вашем столе!

"Что за тупой сукин сын!". Президен Байден оскорбил репортера Fox News

Как выглядел бы ваш город, если бы он был человеком


26 актеров второго плана, которые всех переиграли и стали главным украшением фильма

14-летние пубертаты и бабушки — самые агрессивные пользователи рунета

35 фото разных классных штук, которыми поделились пользователи сети

Когда купил Bitcoin по 60, или Реакция на обвал рынка криптовалют

Робот-пылесос, сбежав из отеля, повеселил пользователей соцсетей

Детские ресурсы для недетского хобби: удивительные работы из LEGO

Кушайте, не обляпайтесь: в российской школе повар руками накладывал макароны в тарелки

Кто меняет цвет глаз, а кто натирается муравьями: необычные факты о животных

На россиянку приставы повесили многомиллионные долги 400 незнакомых ей людей

"Мы без России и месяца не проживем": Кадыров рассказал о сумме ежегодных дотаций для Чечни


Секунды до полуночи: кто и зачем переставляет стрелки на часах судного дня

История исчезновения: города-призраки, опустевшие из-за ошибок людей или проделок природы

Мыслить нешаблонно: история снайпера Василия Зайцева

75-летний французский путешественник погиб, переплывая океан

Вьетнамский умелец смастерил для сына Rolls-Royce из дерева

"Человек ошибся, вот и всё": у пенсионера отобрали пенсию, так как официально он мёртв
Нам кажется что многие из вас находятся под сильным впечатлением от быстро развивающихся технологий современного мира, одними из впечатляющих технологий современности являются двигатели от RYNO и самобалансирующиеся скутеры от Segway. Мы думаем, что многих из вас посещала мысль создать что либо подобное. Поэтому в данной статье мы рассмотрим создание DIY (самодельного, своими руками) самобалансирующегося робота на основе платы Arduino. Во многом принципы работы данного робота будут основаны на алгоритмах PID (PID - proportional, integral, derivative - пропорционально-интегрально-дифференцирующий (ПИД) регулятор), используемых для построения самобалансирующихся скутеров.
Оказалось, что создание подобного робота является задачей не из легких и дело здесь не ограничивается правильным выбором двигателей для робота и ввода необходимых значений в алгоритм PID. Оказалось, что для создания подобного рода необходимо учитывать и много других вещей, например, тип батареи, позиция батареи, захват колеса, тип драйвера мотора, поддержание центра тяжести и многое другое. Но мы все таки попробуем создать такого робота. Итак, начнем.
Необходимые компоненты
- Плата Arduino Uno (купить на AliExpress).
- Приводной двигатель постоянного тока желтого цвета (Geared DC motor (Yellow coloured) ) – 2 шт.
- Модуль драйвера мотора L298N (L298N Motor Driver Module) (купить на AliExpress).
- Гироскоп MPU6050 (купить на AliExpress).
- Два колеса.
- 7.4V Li-ion Battery (литий-ионная батарея или литий-полимерная батарея) (купить на AliExpress).
- Соединительные провода.
- Напечатанный на 3D принтере скелет (остов) робота.
Микроконтроллер: в качестве управляющего микроконтроллера в данном проекте мы выбрали плату Arduino UNO потому что с ней просто работать. Вы можете также использовать платы Arduino Nano или Arduino mini, но мы все таки рекомендовали использовать бы Arduino UNO потому что ее можно программировать без использования внешнего аппаратного обеспечения.
Двигатели: конечно, лучшим выбором для построения самобалансирующегося робота были бы шаговые двигатели, но в целях упрощения проекта мы использовали приводные двигатели (gear motor) постоянного тока желтого цвета – они значительно проще и дешевле чем шаговые.
Драйвер мотора (Motor Driver): если вы, как и мы, выбрали приводные двигатели постоянного тока, то вы можете использовать модуль драйвера мотора L298N или даже L293D (с ним проект будет также работать отлично). Более подробно об управлении электродвигателем постоянного тока с помощью платы Arduino и драйвера мотора L293D можно прочитать в этой статье.
Колеса: не стоит недооценивать эти элементы конструкции робота. У нас достаточно долго не получалось настроить баланс робота пока мы не поняли что проблема состоит в колесах. Колеса для построения самобалансирующегося робота должны иметь очень хорошее сцепление с полом и ни в коем случае они не должны проскальзывать при движении по полу.
Акселерометр и гироскоп: наилучшим выбором в качестве акселерометра и гироскопа для нашего проекта будет модуль MPU6050 – на нашем сайте вы можете прочитать статью о его подключении к плате Arduino. Ни в коем случае не пытайтесь создать подобного робота с использованием обычного акселерометра, например, ADXL345 или подобного ему – это не будет работать. Более подробно объяснение этого фактора будет приведено в конце статьи.
Батарея: для проекта необходима батарея, которая по возможности будет максимально легкой и ее напряжение должно быть больше 5V чтобы мы могли запитать от нее плату Arduino непосредственно, без использования повышающего напряжения модуля. Идеальным выбором в данном случае будет 7.4V Li-polymer (литий-полимерная) батарея. Но в нашем распоряжении была только 7.4V литий-ионная батарея, поэтому мы ее и использовали при создании робота. Но помните о том, что литий-полимерная батарея в данном случае будет все таки лучше чем литий-ионная.
Шасси робота: еще один элемент робота, при создании которого неуместны компромиссы. Для изготовления шасси робота вы можете использовать листы картона, дерево, пластик и т.п. Но помните о том, что шасси должно быть достаточно прочным и не изгибаться когда робот пытается балансировать. Мы для изготовления шасси робота использовали 3D принтер, ссылки на необходимые файлы для него будут приведены далее в статье.
3D печать и сборка шасси робота
Если вы хотите использовать (напечатать) то же самое шасси, которое использовали и мы, то вы можете скачать необходимые для его печати STL файлы с сервиса thingiverse. Мы также добавили туда файлы дизайна чтобы вы могли изменить внешний вид компонентов шасси по своему желанию.
Компоненты данного шасси робота не имею нависающих структур, поэтому вы без особых проблем можете напечатать их на практически любом 3D принтере. Мы для этой цели использовали программное обеспечение Cura и 3D принтер Tevo Tarantula, установки для печати компонентов показаны на следующем рисунке.

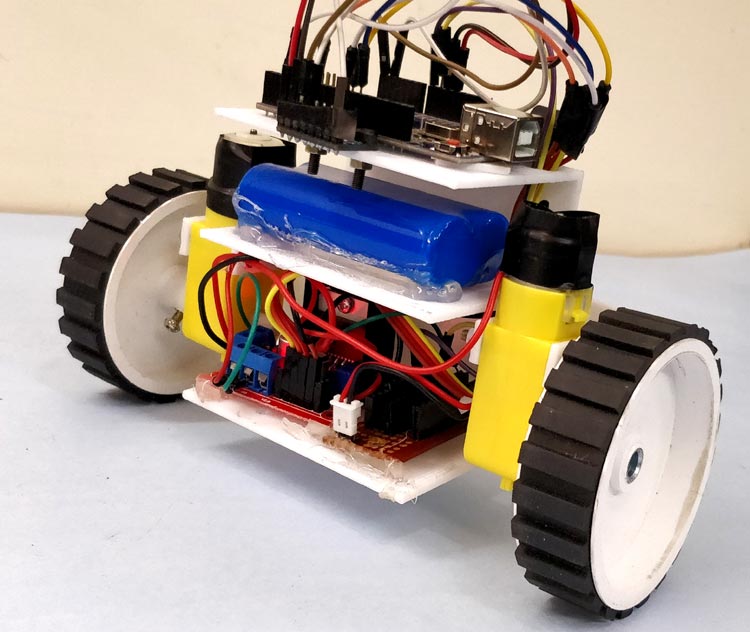
Вам необходимо напечатать скелет робота и 4 компонента для крепления двигателей. Для сборки робота можно использовать 3 мм болты (шурупы). После сборки у вас должна получиться конструкция примерно следующего вида:

Изначально дизайн робота предусматривал размещение модуля драйвера мотора L298N в нижнем отсеке робота и батарею на его верху как показано на приведенном выше рисунке. Этот дизайн робота также является рабочим и вы можете его использовать, в этом случае вы можете непосредственно скрепить части робота, используя специально выделенные для этого отверстия.
Но мы в дальнейшем решили немного изменить дизайн робота и поменяли место расположения батареи и платы Arduino UNO для упрощения ее программирования. Для обеспечения соединений в схеме мы использовали перфорированную плату. Внешний вид самобалансирующегося робота для данного расположения элементов показан на следующем рисунке.

Работа схемы
Схема самобалансирующегося робота на основе платы Arduino UNO представлена на следующем рисунке.

Как видите, схема достаточно проста и в ней вам всего лишь необходимо подключить гироскоп MPU6050 и драйвер мотора к плате Arduino, а также соединить двигатели с драйвером мотора. Схема запитывается от литий-ионной батареи на 7.4V.
Плата Arduino и модуль драйвер мотора L298N непосредственно запитываются через контакты Vin и 12V соответственно. Встроенный в плату Arduino регулятор напряжения преобразует входное напряжение 7.4V в напряжение 5V, с помощью которого и запитывается микроконтроллер ATmega на плате и гироскоп MPU6050. Электродвигатели постоянного тока могут запитываться от напряжения от 5V до 12V, в нашем случае они будут работать от напряжения 7.4V.
Распиновка подключения контактов гироскопа MPU6050 представлена в следующей таблице.
| MPU6050 | контакт Arduino |
| Vcc | +5V |
| Ground | Gnd |
| SCL | A5 |
| SDA | A4 |
| INT | D2 |
Распиновка подключения контактов драйвера мотора L298N представлена в следующей таблице.
| L298N | контакт Arduino |
| IN1 | D6 |
| IN2 | D9 |
| IN3 | D10 |
| IN4 | D11 |
Гироскоп MPU6050 взаимодействует с платой Arduino через интерфейс I2C, поэтому для его подключения мы использовали SPI контакты A4 и A5 платы Arduino. Двигатели постоянного тока управляются с помощью ШИМ (широтно-импульсная модуляция) контактов D6, D9, D10 и D11. ШИМ сигнал в данном случае необходим для управления скоростью вращения двигателей.
Программирование самобалансирующегося робота
Как мы уже видели, схема нашего проекта достаточно проста, но вся "магия" нашего проекта будет как раз заключаться в его программе для платы Arduino UNO. В программе мы с помощью гироскопа MPU6050 будем проверять наклоняется ли робот вперед или назад. Если робот будет наклоняться вперед, то нам необходимо вращать колеса в прямом направлении (прямо) для удержания баланса, а если он будет наклоняться назад, то нам необходимо будет вращать колеса в обратном направлении.
В это же самое время мы должны будем управлять скоростью вращения колес – если робот будет слегка дезориентирован от центрального положения колеса будут вращаться немного медленнее и скорость будет увеличиваться по мере удаления от центрального положения. Для управления подобной логикой робота мы использовали PID алгоритм, в котором центральное положение рассматривается как исходная точка, а уровень дезориентации является выходом.
Для определения текущего положения робота в нашем проекте мы используем модуль MPU6050, который является 6-осевым акселерометром и гироскопом одновременно. Для того чтобы получить надежное значение позиции робота нам необходимо получать значения одновременно и от акселерометра, и от гироскопа поскольку значения от акселерометра обычно зашумлены, а значения от гироскопа имеют тенденцию смещаться (дрифтовать) с течением времени. То есть в программе мы будем комбинировать значения с контактов yaw, pitch и roll гироскопа, а использовать будем только значение с выхода yaw.
На первый взгляд задача создания подобного робота в домашних условиях звучит как невозможная, неправда ли? Но благодаря сообществу Arduino у нас в распоряжении уже есть готовая библиотека, способная выполнять вычисления по алгоритму PID, а также библиотека для работы с гироскопом MPU6050. Эти библиотеки разработаны авторами br3ttb и jrowberg соответственно. Перед началом написания программы вам необходимо их скачать по ниже приведенным ссылкам и добавить в папку с библиотеками Arduino на вашем компьютере.
После того, как эти библиотеки добавлены в соответствующую папку, приступим к написанию программы для нашего самобалансирующегося робота. Полный код программы для этого робота приведен в конце данной статьи, здесь же сначала рассмотрим наиболее важные фрагменты этого кода.
Первым делом в программе мы должны подключить используемые библиотеки - I2C library, PID Library и MPU6050 Library (последние две мы как раз скачали).
В этом видео я вам покажу, как собрать простого робота на Arduino UNO, который может объезжать препятствия. ▻ Купить .
Делаем робота на основе Arduino из трактора King Force 300 Исходный код прошивки этого робота для Arduino Nano .
В этом видео вы увидите вездеход, который я сделал своими руками на Ардуино. Маленький луноход. 00:50 - Общий .
Решил вот попробовать собрать простейшую схему радиоуправления для машинки на основе китайского пульта и .
В этом ролике я решил собрать робота паука на Arduino, который будет управляться через смартфон по Bluetooth.
В этом видео вы увидите вездеход, который я сделал своими руками на Ардуино. Маленький луноход. Список .
Купить arduino робот: ali.pub/24xxfc. Программа для управления роботом: yadi.sk/i/xO6Ixue8r6Y2J Группа в ВК: .
Делаем собаку-робота. Подробная сборка, калибровка и настройка. Делаем первые шаги и гуляем по улице. Программное .
Качай Быстрый Поиск и Браузер для Android и iPhone bit.ly/2P2IpJm. По промо-коду GYVER получи доступ ко ВСЕМ .
SPECIAL. SpotMini от Boston Dynamics это кончено очень круто, но начнем мы с чего нибудь по проще В этом видео мы .
Как сделать кран(руку) манипулятор своими руками маленьких размеров? Создание подобного проекта очень .
Александр Королев в рамках своей авторской рубрики на канале ArturosTV представляет нашим зрителям крутейшего .
Привет друзья я робот 013 мою строительство наконец-то завершено и я с радостью вожусь в эксплуатацию я могу ходить .
В этом выпуске вы узнаете: какие модули и компоненты для создания роботов можно купить на али экспресс; что нужно .
Мало в ютубе русскоязычных роликов про балансирующего робота и как его сделать, поэтому решил сделать свой .
Делаем сами робота - платформу с двумя ногами. Осваиваем азы ходьбы без гироскопов и сложных датчиков.

На фото руководитель Endurance Георгий Фомичев справа.
С разработки робота СелфиБот в 2015г, который в апреле 2016 г. стал open-source, и теперь любой человек может сделать своего робота по технологии Endurance.


Селфибот – это, в первую очередь, персональный робот, которого может собрать каждый, используя недорогую электронику, программу и прошивку Endurance. Главное, что собранного робота можно реально использовать, например, как удобную подставку под телефон для видеотрансляций или видеозаписи. Большим плюсом устройства является его способность поворачиваться вслед за вами. Эта функция, использующая Google API, называется follow me.
Вообще варианты использования робота по сути очень разнообразные, но вернемся к нашему Bb8…
Чтобы его собрать, нам потребуется 3D-принтер.
Мы использовали обычный WanHao Duplicator i3. Он вполне подходит для печати пластиком PLA.
Еще нужно иметь желание разобраться в схемотехнике, чтобы собрать плату. Можно, конечно, собрать все на макетной/контактной плате, но мы используем печатную плату. Так надежнее.

Ставим на печать (предварительно увеличив до нужных нам размеров).
Пластика потребуется около 500 грамм.
Заказываем всю электронику на Ebay или Aliexpress… Тут ее немного, можно купить и в обычном радиомагазине. Но там намного дороже. Если есть желание сделать быстрее, то можно купить готовый комплект электроники у Endurance за 95 долларов, чтобы не заморачиваться, покупая все по частям.

После чего аккуратно делаем печатную плату, описанную на сайте.

Сделав плату, прошиваем ее.
Прошивка для Arduino также выложена на сайте Endurance.
Что получилось? Корпус готов, электроника готова.

Чтобы управлять Bb8, нам потребуется Android телефон. Любой подойдет, лишь бы версия операционной системы была 4.1.x и выше…
С приложением, все довольно просто.
Его нужно скачать и установить на телефон.
После чего важно связать, т.е. спарить Bluetooth телефона и Bluetooth электроники, предназначенной для нашего Bb8.

Пока можно проверить только механическую часть и убедиться, что сервоприводы вращаются и все работает.
Теперь начинается не вполне тривиальная работа.
Она связана с тем, что изначально мы распечатали только корпус Bb8, не задумываясь о внутренних крепежах и креплениях. Это, конечно, минус, но не беда. Готовим внутренние крепежи.
Для этого используем основу из обычного пластика или из акрила.
Теперь нужно закрепить сервоприводы, причем так, чтобы обеспечить вращение в 2-х осях и чтобы один сервопривод удерживал другой. Для этого сделаем чертеж соединительного механизма.

Данная конструкция хоть и не супер технологична, но она работает.
Дальше наша задача собрать это все воедино.


Подключаем питание 12 вольт. Включаем приложение на телефоне и вуаля — демо режим, чтобы проверить, все ли работает.
Робот начинает поворачивать головой.

Ну что ж, будем считать, что в рамках проекта DIY SelfieBot мы все для первого раза сделали.
Для следующего раза можно:
1. Попробовать обработать корпус и сделать его более красивым
2. Придумать какую-нибудь защиту или фартук в месте соединения головы робота и корпуса.
3. Попробовать сделать робота менее шумным.
Все это и не только мы опишем в следующей статье.
Читайте также: