
Робот рыба своими руками
Добавил пользователь Алексей Ф. Обновлено: 19.09.2024
Робототехника подводных устройств развивается по многим направлениям. Большинство подводных роботов создаются для проведения спасательных операций и исследований. В будущем подводные роботы будут помогать осваивать океан для организации рыбной ловли, в фармацевтике, поиске полезных ископаемых и источников энергии.
Подводные роботы могут использоваться также в качестве моделей тестирования роботов, предназначенных для космических исследований. Роботы с нулевой плавучестью являются в определенном смысле невесомыми. В подобных роботах ракетные двигатели моделируются двигателями с гребными винтами. Подводные испытания позволяют имитировать отсутствие трения, наблюдаемое в космическом пространстве. Если вы хотите создать робота, работающего в условиях космоса, то хорошие предварительные результаты можно получить с помощью модели подводного робота. Организация НАСА начала развитие технологий дистанционно управляемых устройств с использованием систем телеслежения (TROV) (см. рис. 13.1) и автономных подводных устройств (AUV). В устройствах TROV в качестве систем дистанционного управления используются системы виртуальной реальности. Технологии телеслежения играют еще более важную роль в исследованиях окружающего пространства и вредном для человека окружении. В будущем технологии телеслежения будут развиваться как в этих направлениях, так и осваивать новые, например индустрию развлечений.

Рис. 13.1 Аппарат TROV NASA. Фотография НАСА.
Дельфины и тунцы
Были предприняты интересные исследования принципов плавания и плавательных движений рыб. Общеизвестно, что подводные обитатели могут передвигаться и плыть более эффективно и экономично, чем гребной винт может двигать судно. Хотите легко доказать это самим себе? Вы когда-нибудь постукивали по стеклу аквариума, в котором плавают рыбы? Внезапный шум заставляет рыб метаться по аквариуму настолько быстро, что ваши глаза не способны уследить за их перемещениями. Представьте, что вы можете создать корабль, способный перемещаться с подобной быстротой и внезапностью. Поэтому неудивительно, что правительство США финансирует некоторые из этих исследований.
Насколько эффективнее плывет рыба по сравнению с нашими современными способами передвижения по воде? Давайте проведем краткий анализ. В 1936 году британский зоолог Джеймс Грей исследовал дельфинов. Его целью было подсчитать мощность, развиваемую дельфином, чтобы перемещаться со скоростью 20 узлов – скоростью, которую обычно наблюдают у дельфинов. Модель Грея была очень жесткой в предположении, что сопротивление воды для движущегося дельфина остается одинаковым для жесткой и гибкой моделей. Это оказалось неверным, но даже с учетом необходимой поправки, результаты Грея оказались очень любопытными. Оказалось, что его дельфин оказался в 7 раз слабее, чем это необходимо для достижения скорости в 20 узлов. Используя дедукцию, можно предположить, что дельфин каким-то образом способен в 7 раз уменьшить сопротивление воды. Но до настоящего времени точного ответа нет.
За последние 60 лет никто не смог окончательно подтвердить или опровергнуть вычисления Грея. Любой плавающий механизм, имитирующий движения рыбы, оказывается значительно менее эффективным. В последнее время предпринимаются новые исследования для изучения способа плавания рыб. С использованием новых компьютерных технологий ученые надеются получить ответ на этот давно волнующий вопрос.
Плавание с помощью крыла
Хвост рыбы можно рассматривать как подводное крыло. При движении хвоста из стороны в сторону он отбрасывает поток воды назад и соответственно движет рыбу вперед. Во время движения хвоста в воде за ним образуются вихри. Есть основания полагать, что принцип образования этих вихрей может быть ключом к пониманию эффективности передвижения рыбы.
Дельфины интересны тем, что их хвост – подводное крыло расположен горизонтально. Он не перемещается из стороны в сторону как у рыбы, а совершает движения вверх-вниз. Такие движения в той же степени эффективно толкают тело дельфина вперед.
Пингвины плывут с помощью толчков их крыльев. Вид пингвина, плывущего в воде, сильно напоминает полет птицы. Однако существует разница. При полете птица взмахами крыльев должна поддерживать тело в воздухе, а также обеспечивать движение вперед. Создание подъемной силы необходимо для преодоления силы притяжения. Для пингвинов подъемная сила не нужна. Плотность воды равна плотности тела пингвина (нулевая плавучесть), поэтому пингвин машет крыльями только для продвижения вперед.
Лопасти и весла
Рассматривая способы передвижения в воде, мы должны включить сюда использование лопастей и весел. При движении по воде утки используют перепончатые лапы в качестве лопастей. Водомерки используют ножки в качестве весел и двигаются вперед, как маленькие лодки.
Исследования в МТИ привели исследователей к идее использования жидкостного динамического параметра, известного как индекс Строхала. Для рыбы этот параметр вычисляется умножением частоты взмахов хвоста рыбы на ширину образующегося вихря, деленную на скорость рыбы. Были исследованы рыбы разных пород. Оказалось, что КПД у рыбы максимален, когда индекс Строхала лежит в пределах 0,25-0,35.
Когда плавники робота-рыбы, созданной в МТИ были переделаны и настроены так, что индекс Строхала попал в этот диапазон, КПД устройства возрос более чем до 86 %. Это большое достижение по сравнению с гребными винтами, обеспечивающими КПД не более 40 %.
Приступаем к проекту
B этой главе рассмотрены два основных проекта подводных роботов. Один из них предусматривает переделку игрушечной подводной лодки, а другой – изготовление робота-рыбы из подручных материалов.
Модели игрушечных подводных лодок производятся и продаются многими компаниями. Их возможности зависят от степени сложности модели, но обычно они управляются по радио и способны погружаться и всплывать (см. рис. 13.2).
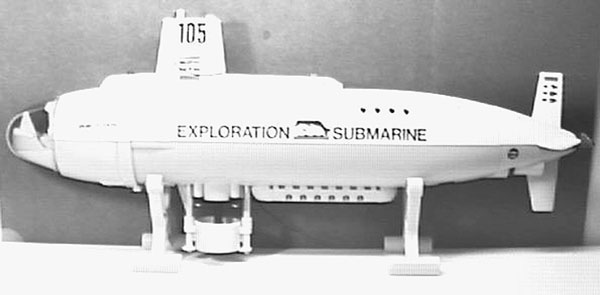
Рис. 13.2. Игрушечная подводная лодка готова к переделке в TROV
При переделке игрушечной подводной лодки я советую отказаться от радиоуправления и перейти к управлению по проводам с использованием соответствующего кабеля. По специальному кабелю можно подвести к подводной лодке питание и управляющие сигналы.

Рис. 13.3. Открытый отсек для размещения электронных компонентов
В подводную лодку можно установить большинство блоков, использованных в автомобиле с дистанционным управлением (см. гл. 9). Единственным отличием является управление по проводам вместо радиоканала.
Подводная лодка является игрушкой, поэтому лучше не запускать ее в открытые водоемы. Крошечные водяные движители в таких лодках могут работать только в спокойной воде. Конечно, создание такой лодки может служить началом для более совершенных конструкций.
Плавание с помощью хвоста
Как уже утверждалось ранее, устройства, имитирующие движения рыб, имеют очень низкий КПД. Эта модель не является исключением. Однако тщательный сбор информации источников типа МТИ может способствовать созданию модели (здесь этого не сделано) с гораздо большим КПД. И если кто-то хочет изготовлять роботов-андроидов, имеющих форму животного, то можно начать именно с этого проекта.
Кольцевые соленоиды
Движение робота-рыбы обеспечивается с помощью кольцевого соленоида (см. рис. 13.4). При включении питания верхняя часть соленоида поворачивается на угол примерно 30°. При отключении питания пружина возвращает механизм в исходное положение.

Рис. 13.4. Открытый отсек для размещения электронных компонентов
В верхней части соленоида находятся, по крайней мере, два резьбовых отверстия 1,6 мм, которые могут быть использованы для крепления деталей. В нижней части соленоида имеются две стойки с резьбой 1,6 мм для крепления соленоида. Соленоид оказался не таким мощным, как мне бы хотелось, но его все же достаточно для обеспечения подводного продвижения.
Электрическая схема
Для генерации медленной последовательности импульсов в схеме использован однопереходный транзистор Q1 (UJT2646) (см. рис. 13.5). Частота импульсов определяется номиналами C1 и R1. Импульсы подаются через резистор R2 на базу Q2. Q2 представляет собой NPN транзистор типа 2N2222. Транзистор Q2 используется для подачи инвертированного импульса на вывод 2 ИС 1. ИС 1 представляет собой таймер 555, включенный по схеме одновибратора. Форма и длина импульса определяются ИС 1. Выход таймера 555 управляет включением транзистора Q3. Транзистор Q3 управляет током, протекающим через кольцевой соленоид, использованный в роботе.

Рис. 13.5. Принципиальная схема устройства
Питание схемы осуществляется с помощью батареи 9 В. Схема достаточно проста и монтируется на печатной плате.
Проверьте работу схемы, соединив ее с соленоидом перед дальнейшей сборкой. Постоянная времени работы соленоида должна быть в районе 1 с.
Механика
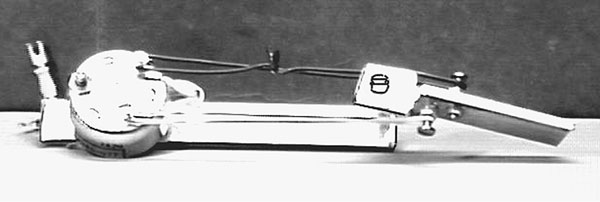
Рис. 13.6. Первоначальный привод движения хвоста
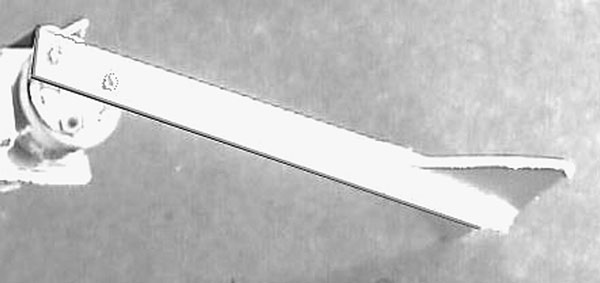
Рис. 13.7. Окончательный вариант привода
Полоса алюминия размерами 3х 12х 140 мм прикреплена к верхней крышке соленоида при помощи двух винтов 1,6 мм и длиной 6 мм. Просверлите сперва два отверстия в алюминиевой полосе, совпадающие с положением отверстий в верхней части соленоида. Затем, чтобы предотвратить излишне глубокое вворачивание винтов в соленоид, предварительно наверните на каждый винт гайку до упора. Если винты слишком глубоко ввернуты в верхнюю подвижную часть соленоида, то они будут препятствовать ее легкому вращению. Прикрепите алюминиевую полосу к подвижной части соленоида.
Плавник хвоста сделан из квадратного кусочка алюминия 30 мм, разрезанного по диагонали. Плавники крепятся к основанию 12 мм с помощью достаточного количества термоклея. Для лучшего контакта можно предварительно зачистить поверхности с помощью наждачной бумаги.
Соленоид крепится к задней части алюминиевой пластины размерами 3x30x50 мм на двух задних стойках 1,6 мм с помощью нескольких гаек. К передней части крепится плата электрической схемы и батарея (см. рис. 13.8).
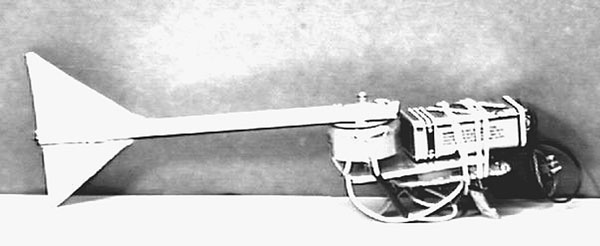
Рис. 13.8. Робот-рыба в сборе
Гидроизоляция
Мы изготовили привод соленоида и электрическую схему. Для исключения попадания воды, которая может привести к порче устройства, необходимо завернуть плату соленоида в тонкую прозрачную пленку, используемую в кулинарии. Чехол из пленки крепится к хвосту с помощью проволоки. Крепление должно обеспечивать легкое поперечное перемещение хвоста.
Эффективность модели
Данная модель робота не обладает КПД настоящей живой рыбы, хотя и обеспечивает движение. Я думаю, что КПД устройства можно повысить, распилив алюминиевую хвостовую пластину 12х 140 мм пополам, и затем соединить половины с помощью пружины 50 мм. Такая пружина позволит хвосту поворачиваться и изгибаться, что может обеспечить больший КПД передвижения.
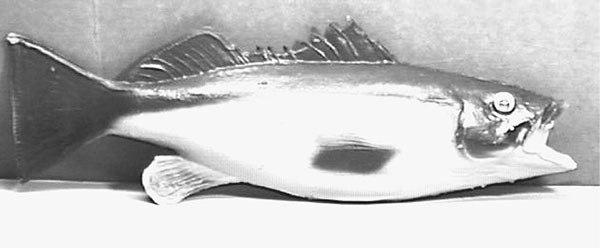
Рис. 13.9. Робот-рыба, заключенный в оболочку резиновой рыбы
Ученые Массачусетского технологического института продемонстрировали прототип мягкого робота-рыбы, перемещающегося в воде подобной настоящей особи. Мягкие роботы, имеющие корпус из силикона и перемещающиеся благодаря движению жидкости (или газа) в каналах внутри корпуса, стали довольно популярным направлением исследований. Новостям о достижениях в данной области посвящен новый журнал Soft Robotics (Мягкие роботы).

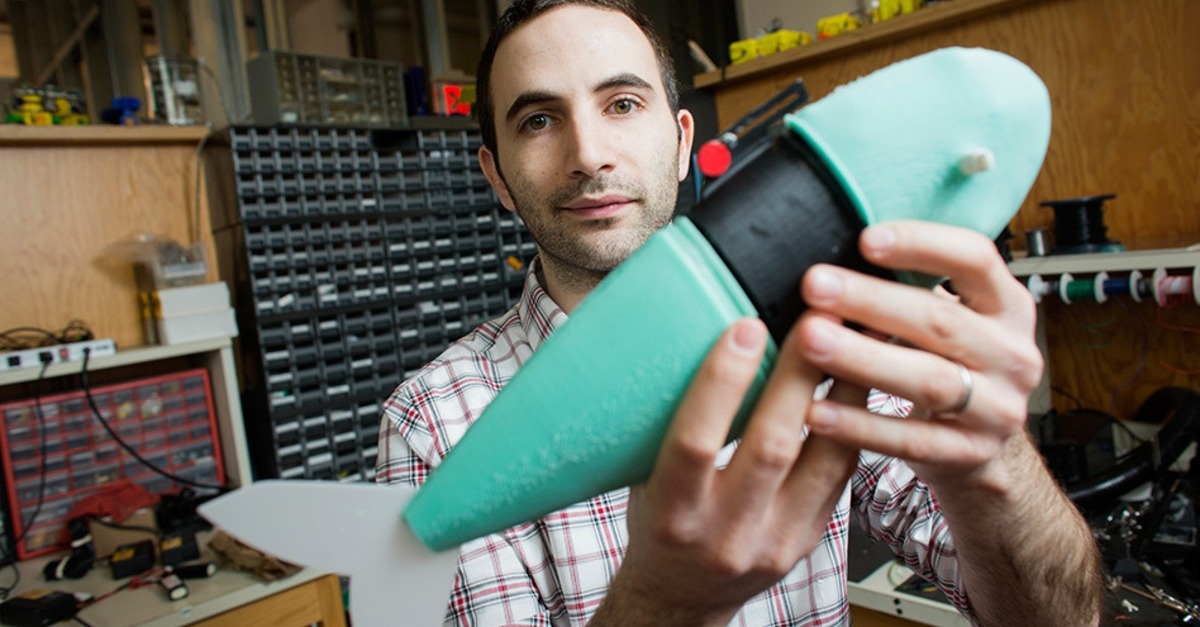
Движение туловища робота-рыбы обеспечиваются с помощью порционного высвобождения углекислого газа из емкости, находящейся в брюшной полости. Пропускание газа по каналам с одной стороны корпуса робота вызывает сокращение туловища и изгиб хвоста в противоположную сторону. Робот обладает полной автономностью. Благодаря конструктивным особенностям он способен осуществить поворот на 100 градусов за доли секунды.


В дальнейшем предполагается заменить в системе движения робота углекислый газ на воду. Кстати, некоторые детали робота-рыбы изготовлены с помощью 3D-принтера.
Прозрачный робота из гидрогеля ловит рыбу
Специалисты из Массачусетского технологического института создали робота из гидрогеля - прозрачного материала, состоящего из воды.

На опубликованном исследователями видео показаны возможности такого робота по захвату небольшой рыбы. Поскольку он незаметен в воде, рыба легко попадает в ловушку и захватывается щупальцами.
Робот двигается за счет накачки в него воды. Устройство способно выдержать до тысячи циклов без ухудшений своих свойств. Помимо захвата рыбки на видео робот продемонстрировал возможности по отталкиванию шарика.

Океан — место, которое не только богато уникальной морской жизнью. Обширные его участки также изобилуют элементами, такими как никель, медь, марганец, серебро, кобальт, цинк, которые необходимы для производства смартфонов, электромобилей и деталей солнечных батарей. Глубоководная добыча — это быстрорастущая область промышленной добычи полезных ископаемых со дна Мирового океана. Это включает в себя извлечение этих самых полезных ископаемых и отложений со дна океана, обнаруженных на глубине более 200 метров. Большая часть усилий по морской добыче, на 2021 год, ограничивается только мелководными прибрежными водами. Месторождения разрабатываются при помощи гидравлических насосов и ковшовых систем, которые выносят руду на сушу для дальнейшей обработки.
Проблема в том, что учёные и защитники окружающей среды выступают решительно против инвазивных методов, предлагаемых добывающими компаниями, поскольку они могут нанести непоправимый ущерб хрупким экосистемам. В конечном счете, способ, которым компаниям будет разрешено разрабатывать морское дно, зависит от Международного органа по морскому дну (International Seabed Authority, ISA). В 2020 году ISA ввёл в действие ряд экологических стандартов, что может привести к увеличению добычи полезных ископаемых на больших участках мирового дна.
Тем временем, учёные разрабатывают автономных рыб-роботов, которые смогут помочь в наблюдении и осваивании океана.

Плавники vs гребные винты
Ни один из известных морских существ не обладает гребными винтами. Возможно, это потому, что животным их слишком сложно развить из существующих частей тела. Или, возможно, это потому, что они не очень эффективны в качестве движителя. На плавучих средствах, чем больше гребной винт, тем сложнее его прикрепить к корпусу и тем больше он рискует увеличить осадку судна и, таким образом, зацепиться за морское дно. Поэтому даже гребные винты самых больших кораблей имеют диаметр не больше десяти метров.

Плавники и ласты не страдают от таких геометрических ограничений. Они могут быть достаточно большими, в отличие от винтов, и необязательно такими жесткими. Ведь жесткий плавник — это уже практически весло. Поэтому их нелегко повредить при контакте с морским дном или другими объектами. И таким образом, именно плавники и ласты стали естественной силовой установкой для передвижения в воде у морских обитателей: от рыб и ихтиозавров до дельфинов и китов, от плезиозавров и черепах до тюленей и пингвинов.
В свете этого эволюционного преимущества плавников, гребные винты кораблей выглядят как технология, созревшая для небольшой модификации биомиметики. Бенджамин Филардо, морской биолог и конструктор, и его компания Pliant Energy Systems разработали Velox, прототип, внешне напоминающий каракатицу, и приводимый в движение гибкими плавниками. Велокс может передвигаться на поверхности воды, под водой, а также по грязи и льду. Если инженерные решения по этому роботу сработают, гребные винты корабля могут однажды стать такими же старомодными, как паруса.

По словам Филардо, Velox производит в три раза больше тяги на единицу затраченной энергии. Продемонстрировав свое устройство американскому Управлению военно-морской разведки, он вызвал у них интерес. В результате появился следующий прототип, c-Ray, который легче и быстрее. В отличие от Velox, который управляется по кабелю, c-Ray автономный. Конечная цель — разработать группу подобных роботов для обнаружения и удаления мин, разведки и противолодочного патрулирования. Однако волнообразный движитель имеет ещё одно важное преимущество. Подводные лодки часто обнаруживаются по производимому ими шуму, большая часть которого исходит от гребного винта и вала, приводящего его в движение. Волнообразный движитель, перемещающий больше воды на более низкой скорости, должен быть тише любого гребного винта. Также такой движитель не производит шум, называемый кавитацией, вызванный кратковременными пузырьками газа, которые образуются в ответ на давление лопастей гребного винта.

Плавники, как у Velox, могут оказаться технологией, которая может быть применена для приведения в движение полноразмерных подводных лодок. Как отмечает Филардо, даже у самых крупных морских животных, больших китов, есть плавники, хоть и расположены иначе, чем у Велокса. Например, синий кит, может развивать скорость более 20 узлов, и может потягаться с ракетными подводными крейсерами стратегического назначения.
Даже если они не найдут применение в военно-морских операциях, Велоксы могут быть задействованы для выполнения различных задач: добыча моллюсков и ракообразных без разрушительного траления морского дна; посадка морских водорослей в больших масштабах; изучения фауны морских глубин. Велоксы уменьшат риск причинения вреда плавающим млекопитающим и рыбам, например, ламантинам, которых иногда смертельно ранят гребные винты кораблей.

Иллюстрация роботов C-Ray, собирающих глубоководные полиметаллические конкреции
— Вы продаете рыбов?
— Нет, просто имитируем.

Огромные косяки рыб являются одними из самых потрясающих зрелищ дикой природы: тысячи и тысячи рыб синхронизируют своё поведение, чтобы найти пищу, мигрировать и спастись от хищников. В косяке нет лидера: каждая отдельная рыба принимает решения на основе того, что делают её соседи, посредством естественного процесса, называемого неявной координацией. Команда исследователей из Гарвардского университета имитировала эту модель поведения с помощью роботов, получивших название Blueswarm, которые синхронизируют своё движение без внешнего контроля.

До этого математики и инженеры стремились понять влияние локальных взаимодействий на глобальное поведение, чтобы исследовать естественный коллективный разум и создать аналогичные коллективы искусственных роботов. Недавние достижения продемонстрировали успешные реализации самоорганизующихся роботов размером до 1000 единиц, хотя и ограниченными двумерными локальными взаимодействиями. Например, проект SWARM-BOTS продемонстрировал коллективный транспорт и формирование цепей, а проект Kilobot продемонстрировал самосборку крупномасштабной формы. В трёхмерной воздушной среде большие стаи дронов демонстрируют сложные маневры, хотя в основном полагаются на централизованные базовые станции или GPS, а не на локальные и самоорганизованные взаимодействия. Например, Intel Shooting Stars (использованный на Зимних Олимпийских играх 2018 года) и Crazyswarm централизованно управляются одним компьютером и сильно зависят от GPS и motion capture, тогда как VIO-Swarm использует местную визуальную инерциальную одометрию (visual inertial odometry, VIO) для определения положения. Другие воздушные рои демонстрируют децентрализованную самоорганизацию, но полагаются на обмен местоположениями GPS между роботами или на сигнальный домашний маяк для определения относительного положения. Полностью децентрализованная координация в 3D была достигнута с помощью Swarmanoid, разнородного роя, состоящего из взаимодействующих колесных, карабкающихся и летающих роботов.

По сравнению с наземными коллективами, трёхмерные подводные робототехнические системы ещё не смогли достичь аналогичных уровней самоорганизации. Несколько предыдущих проектов предусматривали создание коллективов роботов для мониторинга окружающей среды на участках с высокой экологической чувствительностью (например, коралловых рифов) до инспекций подводной инфраструктуры и поисково-спасательных операций. Кроме того, такие коллективы могут предоставить данные для понимания того, как поведение косяка возникает из-за решений отдельных рыб. Однако водная среда создает серьёзные проблемы для передвижения и ограничивает взаимодействие; традиционные методы наземной связи, такие как беспроводное радио, плохо работают под водой, а GPS и Wi-Fi недоступны. В результате большинство подводных роев координируются только на поверхности или вообще не имеют координации, как следствие, они не могут достичь сложного коллективного поведения, которое демонстрируют косяки рыб.
Для решения этой проблемы исследователи создали систему координации на основе зрения, и посредством синих светодиодов. Каждая отдельная робот-рыба, называемая Bluebot, оснащена двумя камерами и тремя светодиодными лампами. Встроенная камера с рыбьим объективом, обнаруживает светодиоды соседних Bluebots и использует специальный алгоритм для определения их местоположения и движения. Исследователи показали, что Blueswarm способен демонстрировать сложное синхронизированное поведение, такое как агрегация, дисперсия и формирование круга.

Исследователи говорят, что идеи этого проекта, помогут им разработать миниатюрные подводные рои, способные выполнять экологический мониторинг и даже поисковые миссии в хрупких средах, и для защиты окружающей среды. Исследователи также смоделировали простую поисковую миссию. Используя алгоритм рассеивания, Bluebots рассредоточиваются по резервуару, пока один из них не приблизится достаточно близко к объекту, испускающий сигнальный красный свет. Как только робот обнаруживает свет, его светодиоды начинают мигать, что запускает алгоритм агрегации у остальных роботов роя. Затем все Bluebots объединяются вокруг источника сигнала.

Bluebots напечатаны на 3D-принтере и имеют длину в 13 см. Они имеют независимо управляемые плавники, которые приводятся в движение электромагнитным приводом, что позволяет выполнять маневры, такие как поворот и остановка на месте, а также быстрое ныряние и всплытие. Также у них есть встроенные светодиоды синего света и пары камер (вместо глаз). Каждые полсекунды алгоритм машинного зрения определяет, сколько Bluebots в поле зрения, и определяет их относительные расстояния и угловые положения.
Роботизированные рыбы это новый инженерный шаг на пути к большей автономности роботов. Они могут дать толчок, необходимый для новых подводных исследований. Робот-рыба может плавать рядом с настоящей рыбой, и с ним, человек может по-новому взглянуть на жизнь под водой и приблизиться к морской жизни. В будущем, усилия этих разработок действительно могут привести к чему-то, выходящему за рамки нашего нынешнего воображения.

Инженеры из Корнелльского, Пенсильванского, а также одного из европейских университетов создали мягкого робота-рыбу, использующего в качестве источника энергии не твердые аккумуляторы, а систему искусственного кровотока, по которому течет жидкий электролит. Такой подход позволяет 40-сантиметровой машине накапливать больше энергии в ограниченном пространстве и работать в течение более длительных периодов времени без необходимости использования тяжелых и громоздких аккумуляторных блоков. О разработке сообщается в журнале Nature.
По мнению Роберта Шеперда, робототехника из Корнелльского университета, главы команды, разработавшей этого робота, их разработка перспективна благодаря своей мультифункциональности и автономности — на ее основе можно создать новое поколение роботов, способных выполнять задачи без вмешательства человека.
Как создать максимально автономного робота?
Создание максимально автономных роботов, способных самостоятельно работать в течение продолжительных периодов времени является ключевой проблемой в робототехнике. Между тем такие машины очень пригодились бы, например, при выполнении продолжительных поисково-спасательных операциях или в ходе глубоководных исследований, говорит Сесилия Ласки, робототехник из Школы перспективных исследований имени Святой Анны в Италии.
Разработанная инженерами роботрыба похожа на лучеперую рыбу-зебру. Ее конструкцию пронизывают гибкие искусственные сосуды, состоящие из связанных между собой проточных аккумуляторов. Внутри каждого такого аккумулятора есть положительный и отрицательный электроды (анод и катод), разделенные мембраной. Специальные небольшие насосы перекачивают по всей этой цепочке жидкий электролит (иодид цинка). Энергию, которая возникает при движении электронов от анода к катоду, роборыба использует для функционирования электронных систем робота. При этом ее плавники приводятся в движение непосредственно за счет движения жидкости внутри них. Такой подход позволил увеличить объем энергии, хранимый в роботе на 325 процентов, отмечают разработчики.

В ходе испытания роборыба могла плавать автономно в течение длительного времени (до 37 часов без подзарядки) со скоростью около 1,5 длины тела в минуту при движении против течения.

Роботы
Немного истории
Примерно 10 лет назад японские ученые и конструкторы приступили к созданию роботов, имитирующих поведение и движение рыб. Эксперимент задумывался как способ изучения образа жизни настоящих, живых морских и речных обитателей.
Первые управляемые модели выпустила компания Sedensha Co LTD, но они управлялись сигналами, идущими по проводу. Вскоре появились радиоуправляемые прототипы.
Совершенствование образцов подводных роботов (в частности, в японском Институте высоких технологий) привело к появлению устройств, имитирующих черепах, рыбу-меч, морских коньков, скатов и других удивительных обитателей морей и океанов. Совсем недавно удалось даже создать высокотехнологичного робота, похожего на медузу!
Изобретения японских конструкторов, изначально направленные на решение научных задач, вскоре стали основой для создания массового производства водных игрушек для детей и взрослых. В последние годы в этой деятельности весьма преуспела компания ZURU из Новой Зеландии, чьи высокотехнологичные игрушки массово продаются более чем в 40 странах мира.
Плавание рыбофишей. Как плавают robofish крупным планом
Для теста взяты рыбки из нашего магазина — 4 китайских аналога “Happy fish” в цветах: розовый, синий, зеленый и оранжевый, вид рыб – клоун.
Зеленая рыбка-робот Робофиш. Robofish
Скоро в продаже
Синяя рыбка-робот Робофиш. Robofish
Скоро в продаже
Розовая рыбка-робот Робофиш. Robofish
Скоро в продаже
Оранжевая рыбка-робот Робофиш. Robofish
Скоро в продаже
Как ведут себя рыбки-роботы в аквариуме
Однако как только искусственные рыбы попадают в воду, они включаются и начинают имитировать движения настоящих декоративных аквариумных животных:
- расправляются синтетические плавники,
- включаются светодиоды,
- микромоторы заставляют роботов двигаться с различной скоростью вверх и вниз, вперед и назад, поворачиваться вокруг своей оси и даже переворачиваться спинкой вниз.
Они двигают силиконовыми плавниками и хвостом совсем как живые!
Эксплуатировать высокотехнологичные устройства очень легко, так как они самостоятельно включаются, попадая в водную среду. Нужно лишь периодически менять маленькие элементы питания, так как пары батареек хватает на 5–6 часов активной работы. Когда требуется временно отключить RoboFish, то достаточно их просто достать из воды, а повторная активация возможна через любой промежуток времени.
Если в аквариуме разместить декорации, установить искусственные пластиковые водные растения, опустить в него роботов-рыбок, то можно создать отличный уголок, имитирующий прекрасный подводный мир!
Сравнение китайских и оригинальных рыб
Оригинал
Китай
хвост сделан более качественно, чем у китайской
слегка прозрачный пластик
в комплекте также идет подставка под рыбу
практически такая же, как и оригинал, только в нашем случае раскраска менее цветастая
пластик не прозрачный
выглядит более дешево, чем оригинал, но в воде сильного отличия нет
Роботы-рыбки (robofish) произвели фурор на рынке игрушек. Сейчас много подделок под оригинал, и вот мы решили разобраться чем же хуже китайские рыбы в отличие от оригинала (производства компании ZURU) и так ли это. В итоге скажем, что китайские рыбы плавают также, ни чуть не уступая оригинальным рыбам.
Достоинства и недостатки
Рыбы-роботы могут плавать в любой емкости с водой. Их можно запустить в обыкновенную банку, в ванну, в мини-аквариум, в детский бассейн.
- Основное преимущество состоит в том, что в данном случае совсем не требуется приобретать и использовать вспомогательное техническое оборудование — фильтры, аэраторы, компрессоры.
- Не нужна и аквариумная химия для борьбы с водорослями, так как достаточно просто вылить старую воду и залить свежую.
- Нет необходимости приобретать корм для рыбок и, соответственно, чистить аквариум от мусора.

Кстати, приобретая подобную игрушку, следует убедиться в наличии двух запасных батареек.
Разумеется, роботы (в том числе и похожие на рыб) никогда полностью не заменят живых существ. Искусственные двигающиеся рыбки не подойдут любителям настоящей, естественной природы. Однако в качестве игрушки или яркой декорации аквариум с RoboFish способен украсить любое помещение и доставить радость вашим детям!
Купить robofish (робо рыбки) можно прямо здесь на сайте
С технической точки зрения данное устройство можно назвать электронным прибором, который включается при соприкосновении с водой.
Следует отметить, что искусственные электронные рыбки чаще всего имитируют вполне определенные виды живых аквариумных рыб.
Светодиоды, вмонтированные в корпус устройства, включаются при уменьшении внешней освещенности. В вечернее и ночное время аквариум освещается самими рыбками, он представляет собой весьма оригинальный ночник, где источником света является стайка плавающих роботов, очень похожих на настоящих обитателей водной стихии.

Итоги теста более подробно
1. Оригинал плавает около 90-105 минут, после он плавает ещё минут 20-30, но из-за нехватки питания батареек движения вялые и толку особого нет, после высыхания и “отдыха” плавала около 30-45 минут, потом ещё столько же, в итоге среднее время работы около 3-4 часов.
2. Китайские рыба плавают меньше 60-75 минут и прекращают двигаться практически сразу, после окончания питания батареек. После “отдыха” снова плавают, без замены батареек, около 30-60 минут, поэтому время работы китайских рыб и оригинальных примерно одинаково. Также ещё после “отдыха” рыба тоже плавала некоторое время, в общем около 3 часов.
3. После 3 циклов замены батареек (это около 10 часов работы) как оригинал, так и китайские рыбы работают без нареканий.
В итоге мы считаем переплачивать в 2 раза за оригинал не имеет смысла, тем более, что через час плавание рыб уже поднадаедает и если запускать их в ванну при купании ребенка — вы тоже не будете купать его больше часа. В итоге все зависит от батареек, чем они лучше – тем больше будет рыба плавать, а время работы примерно одинаково.
РЕКОМЕНДАЦИИ: рыбы плавают лучше в квадратных емкостях, т.к. в круглых они практически всегда плывут по кругу. Меняйте батарейки хорошо вытерев рыбу от воды.
Читайте также: