
Робот пылесос своими руками на ардуино
Обновлено: 05.07.2024
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.
Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Изготовление робота-пылесоса в домашних условиях
Необходимые материалы
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.

Автор, специалист в сфере IT и новых технологий.
Получил высшее образование по специальности Фундаментальная информатика и информационные технологии в Московском государственном университете имени М.В. Ломоносова. После этого стал экспертом в известном интернет-издании. Спустя время, решил попробовать писать статьи самостоятельно. Ведет популярный блог на Ютубе и делится интересной информацией из мира технологий.
Видео уборки.
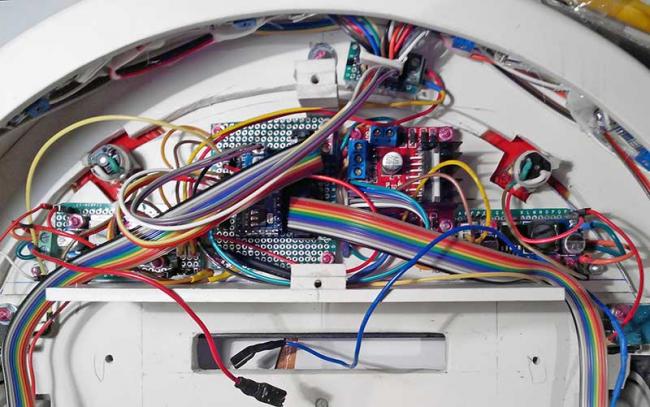
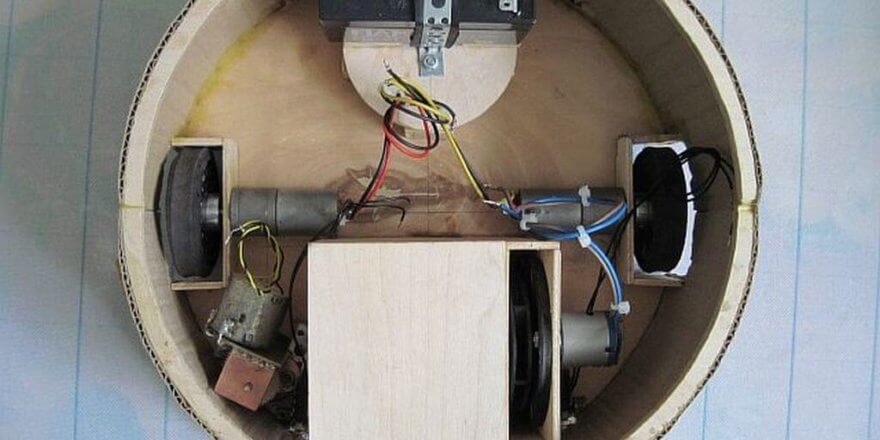
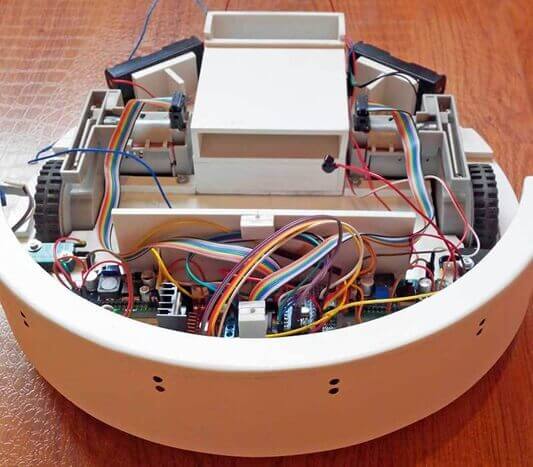
Почти вся электроника прячется впереди робота. Мозгом пылесоса служит Arduino Pro Mini.
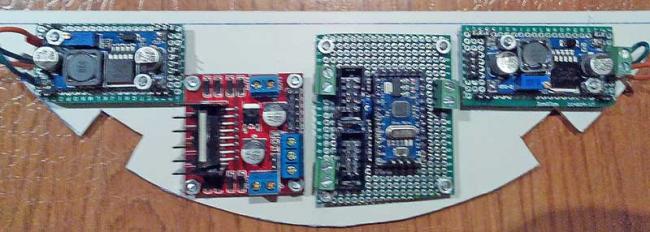
Вырезал из ПВХ подложку и прикрутил к ней все платы.
Колеса поставил мощные с оптическими энкодерами внутри. Описание колес и их характеристики есть здесь.
Перед тем как подключать колеса, припаял к ним такой 10-пиновый разъем.

Приделал на 10 жильный шлейф такой штекер. Просто вставил шлейф в штекер и зажал в тисках. Главное сильно не зажимать, я раздавил один :)
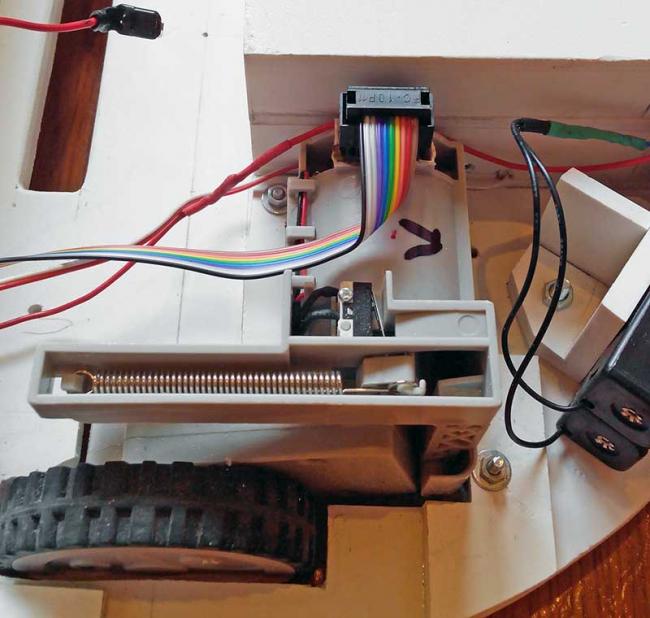
Получилось так.
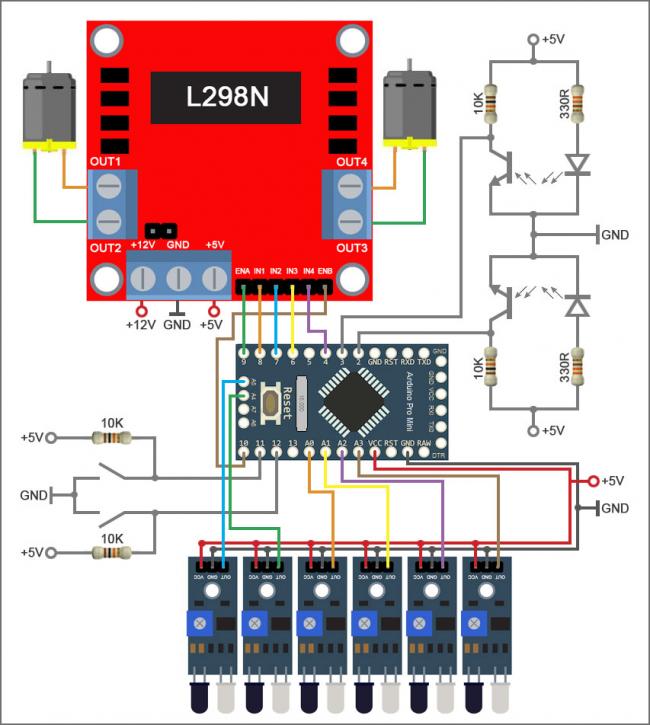
Схема. Моторы от колес подсоединены через модуль L298N. Для работы модуля подключил +5 вольт на логику и +12 вольт для моторов, перед этим снял перемычку. Если перемычку не снимать, то 5 вольт подключать не надо, но тогда модуль ведет себя нестабильно.
Выключатели столкновения подключены к пинам 11 и 12, оптические энкодеры к пинам 2 и 3 (см. схему).

Датчики препятствий поставил такие, как на фото, но пришлось перепаивать диоды на другую сторону и загибать их на 90 градусов по отношению к плате.
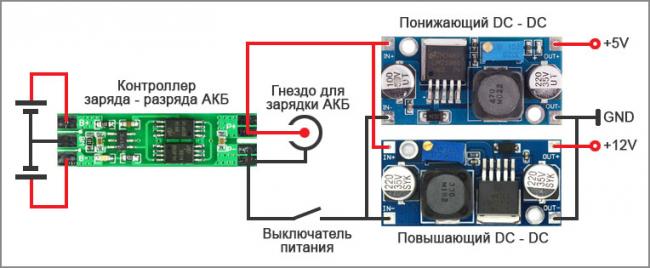
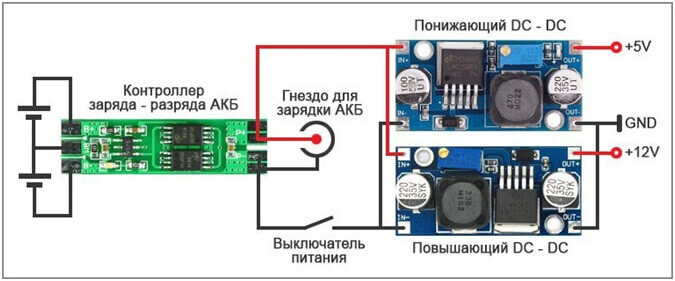
Схема питания робота-пылесоса.
Питается все это хозяйство от 4 аккумуляторов формата 18650, подключенных последовательно две пары, через контроллер заряда-разряда АКБ. Далее с контроллера через выключатель подсоединены повышающий и понижающий DC-DC преобразователи. + 12 вольт питает моторы колес и моторы передних щеток. +5 вольт питает всю остальную электронику. Турбина питается от 7 — 8 вольт, так что для нее преобразователь не нужен.
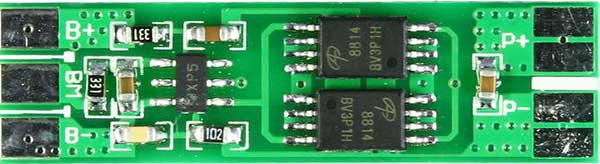
Сам контроллер.
Скетч пока самый простой, для хаотичной уборки.
В планах:
Покрасить корпус, или обтянуть пленкой.
Сделать несколько режимов уборки.
Подключить блютус модуль.
Написать программу для телефона на андроиде (управление режимами, ручное управление, отображение заряда АКБ.
Сделать под пылесосом синюю подсветку для красоты :)
Oldroid
Приветствую! Хотел бы попросить Алекса сделать ультра-бюджетный робот-пылесос на базе Arduino. В качестве корпуса можно использовать, например, герметичный контейнер для продуктов. Видел на ютубе подобные проекты. Но с ориентированием у них не очень, да и сосут плохо.
Wan-Derer
Oldroid
BoronnikovAI
@Oldroid, а ты думаешь, что нормально работающий умный пылесос можно сделать из одной дуины и моторчика?)
Oldroid
@Oldroid, а ты думаешь, что нормально работающий умный пылесос можно сделать из одной дуины и моторчика?)
BoronnikovAI
@Oldroid так в том видео датчиков итак по минимуму. Там нет малинки с круговым лазерным дальномером для постройки 3х мерой карты местности, сложных алгоритмов построения пути и прочего. Просто коробка, в которой поставлен датчик удара и 4 зафиксированых дальномера. Так что тупее только веник на колёсиках.
О сайте
- Официальное сообщество YouTube-канала AlexGyver. Здесь обсуждаются проекты автора и остальных участников форума, а также рождаются новые крутые идеи. У нас можно получить ответы на вопросы по техническим темам в разделе помощи, найти себе исполнителя или заказчика на разработку электроники и совместно заказать плату для проекта. Приятного общения!
Новые темы
- Автор: Maxsoys
- Вчера в 23:02
- Ответы: 1
- Автор: Stas_Bro
- Вчера в 22:24
- Ответы: 3
Статистика форума
На данном сайте используются файлы cookie, чтобы персонализировать контент и сохранить Ваш вход в систему, если Вы зарегистрируетесь.
Продолжая использовать этот сайт, Вы соглашаетесь на использование наших файлов cookie.
В современном ритме жизни не всегда получается поддерживать в доме чистоту. В этом деле поможет современные технологии. Робот-пылесос появился более 15 лет назад. Его типовой внешний вид напоминает крупную шайбу, которая передвигается по комнате по заданному алгоритму или случайным образом (пока на что-нибудь не наткнется) и собирает мусор. Предлагаем вам изучить 2 пошаговые инструкции, позволяющие сделать робот-пылесос своими руками.
Материалы для сборки
Итак, для сборки робота-пылесоса нужно разобраться с его составными частями, пойдем по порядку. Он должен сам передвигаться по комнате, поэтому нужны двигатели, в зависимости от конечной конструкции их должно быть от 2-х до 4-х, а также возможность переключения направления вращения и скорость, значит, нужна плата для управления двигателями. Если вы используете двигатели постоянного тока, то нужна плата с 4-мя транзисторами (H-мост).
Кроме пылесоса нужна подвижная (вращающаяся) щетка, которая будет отчищать поверхность, поднимать ворс половика, сметать мусор. Для этого нужен еще один или два моторчика.
Система, которая будет всем этим управлять. Простейший вариант на Arduino. Для такой задачи подойдет любая из плат, по размерам удобно разместить вариант Nano или Pro mini.
Идея №1: робот-пылесос из картона
Основа робота делается из плотного картона. Его лучше склеить в пару слоев, а волокна разместить перпендикулярно. Для его технической начинки нужен такой набор деталей:
- Любая плата Arduino.
- Breadboard или простая макетная плата, в принципе можно и без неё, всё просто спаять.
- 2 ультразвуковых датчика расстояния (дальномер).
- Турбина от пылесоса.
- Небольшой двигатель или кулер от компьютера.
- Двигатели с редукторами и колеса.
- Контроллер для двигателя.
- Провода для соединений схемы.
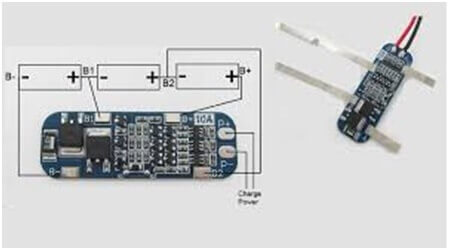
- Аккумуляторы и контроллер заряда.
В качестве питания для робота нужно использовать 3 литиевых аккумулятора. Напряжение каждого из них 3,7 В. Для их заряда нужен контроллер. Например, такой как на фото:
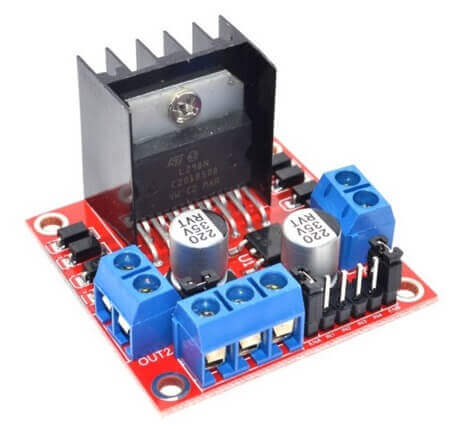
Для регулировки скорости на пин ENA или ENB подаётся ШИМ сигнал, а для задания направления вращения подают разноименные сигналы на IN1 и IN2 для одного двигателя и IN3, IN4 для другого двигателя. При этом если на пине IN1 у нас логическая единица, а на пине IN2 – логический ноль, двигатель крутится в одну сторону, чтобы сменить направление нужно поменять местами 1 с 0. Его нужно собрать с ардуино по такой схеме (пины можно использовать любые, это вы укажете в скетче).

Схема на ардуино
Далее нужно делать основу из картона и закрепить на ней колеса, должно получиться что-то вроде этого:

Основа из картона
Вот вид с нижней стороны. Два ведущих колеса с угловым редуктором и поворотное колесо:

Теперь нужно собрать схему, которая монтируется на основание. Диаметр основания должен быть около 30 см, чтобы туда влезла и электроника и сам блок пылесоса.

Вместо дальномеров можно использовать вариант с бамперами, которые соединены с концевыми выключателями. При столкновении с препятствием система управления даст сигнал о смене направления движения.

Контактные бампера можно сделать и своими руками, для этого нужен тонкий, но жесткий провод, например от витой пары. Для этого формирует контактную площадку на внутренней стороне бампера из фольги, и закрепляем проводник как это показано ниже. При столкновениях робота-пылесоса с мебелью и стенами они будут соприкасаться. Вам остается отрегулировать расстояние от проволоки до фольги, чтобы добиться нужной чувствительности и исключить ложные срабатывания. На фольгу подается 5В, а провод идёт на вход Ардуино, подтянутый к минусу через резистор на несколько кОм.

Самодельный контактный бампер
Устройство питается от аккумуляторов, для питания системы управления можно применить линейные стабилизаторы типа l7805. Чтобы отрегулировать скорость вращения моторов подойдет понижающий преобразователь, например LM2596.


Самое сложное — это сконструировать и собрать пылесос. Вот его приблизительный чертеж:
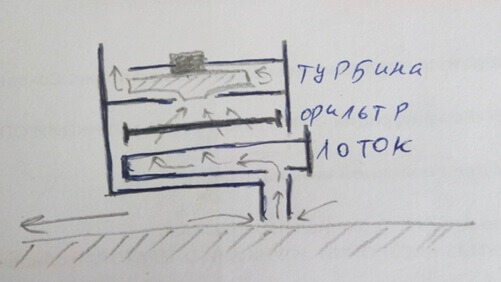
Отламываем родные лопасти от кулера, и закрепляем на его роторе турбину от пылесоса. Важно закрепить турбину точно в центре, иначе вы получите дисбаланс и вибрации.

Вот так выглядит обратная сторона турбины, закрепленной на роторе кулера. Закрепить её можно на термоклей или на суперклей

Вид турбины изнутри
Вот и вся пошаговая инструкция по сборке робота-пылесоса, сделанного из подручных материалов. Алгоритм его работы такой: робот-пылесос едет вперед, пока не встретит препятствие. После столкновения (или приближения, если вы используете УЗ дальномеры) останавливается, отъезжает назад на заданное расстояние, разворачивается на произвольный угол и едет дальше.
Идея №2: почти заводской робот
Предлагаем вашему вниманию не более сложный проект робота-пылесоса. Вот его внешний вид в собранном состоянии:
Самодельный роботизированный пылесос
Система навигации в нем собрана из комплекта 6-ти ИК-датчиков препятствия. На случай, если не сработал ни один из них, то предусмотрены два контактных датчика (концевых выключателя). Система управления двигателями на таком же драйвере с микросхемой L298N. Для его сборки вам понадобится:
- Плата Ардуино, в оригинале использовалась Pro-mini.
- USB-TTL переходник для прошивки этой модели ардуино. Если вы будете использовать Arduino Nano, то он не нужен, т.к. в ней есть возможность прошивки по USB.
- Драйвер для моторчиков L298N.
- Моторчики для колес с редуктором.
- 6 ИК-датчиков.
- Моторчики для турбины (по возможности помощнее).
- Крыльчатка турбины пылесоса.
- Моторчики для щеток могут быть любыми.
- 2 датчика столкновения.
Всё это собрать по такой схеме:
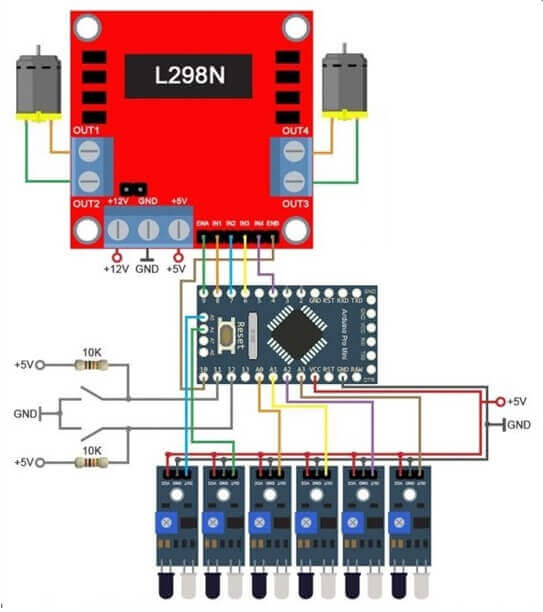
Схема сборки робота-пылесоса
Для сборки цепи питания робота-пылесоса нужны:
- 4 литиевых аккумулятора, подойдут типа 18650.
- 2 преобразователя постоянного напряжения (повышающий и понижающий).
- Контроллер для заряда и разряда 2-х аккумуляторов (искать в интернете по запросу 2s li-ion controller). В схеме используется последовательное включение двух параллельно включенных банок, в итоге их выходное напряжение получается больше 7,4В, а параллельная цепочка нужна для повышения ёмкости и автономности работы.

Вот схема питания этого робота:
Кроме этого нужен пластик (ПВХ) или любой другой материал для корпуса робота, можно его распечатать на 3D-принтере, если у вас есть такая возможность.
Для работы самоделки нужна прошивка, вот пример алгоритма хаотичной уборки, мы взяли его с сети. Ссылка для скачивания скетча: прошивка для робота-пылесоса.
В этой статье были рассмотрены 2 конструкции робота-пылесоса, которые можно повторить и собрать своими руками. Сделать автоматическое средство для уборки помещения можно, вложившись в бюджет от 30 до 100 долларов. Самыми дорогими деталями являются аккумуляторы, двигатели и платы ардуино. Если у вас получилось собрать самодельный робот-пылесос или вы придумали другую конструкцию, присылайте примеры в комментарии, будем рады открытому общению!
Напоследок рекомендуем просмотреть видео, на которых наглядно демонстрируется еще несколько идей, как сделать робот-пылесос в домашних условиях:
Дмитрий, я как понял эта малина,это компьютер на ладони в уменьшенном виде,тогда зачем системный блок большой загрузил операционку и пользуйся или я не так понял,что то не догоняю,интересная вещь но как отрисовку карт впихнуть туда не понял и нужна там уже не коды наверное а программы

Саша, это совсем разные вещи, к малине можно подключить камеру и там linux. Почитай ее характеристики и все поймешь.

Дмитрий, ну просто,такая фишка,я заметил у нового пулисоса,когда он проезжает в первый раз по помещению,то отрисовывает карту,пока что ездит в слепую так скажем но после,двигается по той траэктории пространства,что уже отресовано,тоесть автономно,без участия человека,я просто хотел и пулисос и коечто другое,что бы если к примеру дверь была открыта то он после отрисовки не смог туда уйти а двигался к примеру прямо,мне просто не хотелось бы что бы этот робот убежал от меня куда ему вздумается и попал в чужие руки или под машину под колесо,просто делаю сейчас хоть проэкт и сыроват,делаю машинку метор на метор для уборки снега,правда времени мало на это,и вот хочу что бы по этой карте ездил и чистил,но с блютузом через смартфон,что бы можно было и автономно включать и самому управлять им,но пока можно и без этого,программы нужны для ардуины мега или уно,у меня этого много:)
Дмитрий, а какой у малины процесор у ядра и видюха,смахивает малина на нетбук или планшет,если бы я раньше знал,что у неё такие возможности то планшет или нет бук нафик не нужен и рядом не стоял стакой крутой штукой,и что интересно эта плата выгоднее чем планшет или нетбук если сломается,купи новую плату дешевле обойдётся чем на планшет
BTSerial.begin(9600);
Serial.begin(9600);
vservo.attach(9);
vservo.write(90);
vspeed(255,255);
>
void loop() <
if (BTSerial.available())
<
vcmd = (char)BTSerial.read();
Serial.println(vcmd);
if (vcmd == 'F') <
vforward();
>
if (vcmd == 'L')
<
vleft();
>
if (vcmd == 'R')
<
vright();
>
BTSerial.begin(9600);
Serial.begin(9600);
vservo.attach(9);
vservo.write(90);
vspeed(255,255);
>
void loop() <
if (BTSerial.available())
<
vcmd = (char)BTSerial.read();
Serial.println(vcmd);
if (vcmd == 'F') <
vforward();
>
if (vcmd == 'L')
<
vleft();
>
if (vcmd == 'R')
<
vright();
>
Читайте также: