
Робот на 4 ногах своими руками
Добавил пользователь Morpheus Обновлено: 05.10.2024
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
За несколько последних десятилетий развитие науки и техники достигло больших высот. В связи со стремительным развитием робототехники во всем мире, появилась возможность упростить, ускорить и автоматизировать многие процессы, которые раньше требовали больших трудозатрат и рисков.
Строительство зданий и сооружений требует тщательной подготовки. Для этого необходимо большое количество высококлассных специалистов в области строительства: архитекторы, геологи, геодезисты, каменщики, электрики и др. Многие из них при выполнении работ подвергаются опасным факторам, таким как агрессивная среда, высотные работы, тяжелые климатические условия. Всё это требует высоких трудозатрат, материальных вложений и рисков.

В настоящее время задачей прогрессивного строительства является автоматизация процессов и повышение производительности опасных и высокоточных работ.
Я предлагаю кардинально новый способ проведения некоторых работ при строительстве объектов. Для автоматизации этих процессов будет использоваться роботизированное автоматическое устройство, называемое гексапод, с закреплённым к нему манипулятором, который будет проводить определённые работы.
Благодаря стопоходящему передвижению данный робот сможет перемещаться на различных видах поверхностей, взбираться на возвышения и с большой точностью совершать манипуляции с различными модулями.
Манипулятор на гексаподе служит для захвата объектов и перемещения их в пространстве. Так же к нему могут крепиться различные установки, например для заливки стяжки полов или фундамента, для бурения или сверления, сварочный аппарат. За счет встроенных датчиков, таких как инфракрасные, ультразвуковые или оптические, гексапод сможет ориентироваться не только днем, но и в темное время суток. При помощи специально разработанного ПО робот построит трехмерную модель полигона (участок, в котором проходит строительство) и в режиме реального времени будет сообщать о процессе строительства по средством протокола MQTT или же иных средств для передачи данных.
За счет модульного строительства (применение модулей из которых собирается сооружение, что напоминает сборку конструктора), собирать при помощи различных установок, гексапод сможет в буквальном смысле собирать и сцеплять модули между собой. В виду того, что гексапод имеет несколько типов походки и режимов управления, тот может выступать как в роли подъемного крана, так и в роли грузоперевозчика.
В настоящее время важным является автоматизация различных видов работ. Это дешевле, чем нанимать множество рабочих, значительно ускоряет процесс и повышает его точность. Технологии 21-го века позволяют создавать мощные мехатронные устройства, которые будут выполнять большинство однотипных работ, требующих от человека времени, концентрации внимания и рисков для жизни. Конечно же, на начальном этапе разработки требуется большое количество материальных вложений, но с массовым производством роботов и усовершенствованием их, удешевиться и их производство.
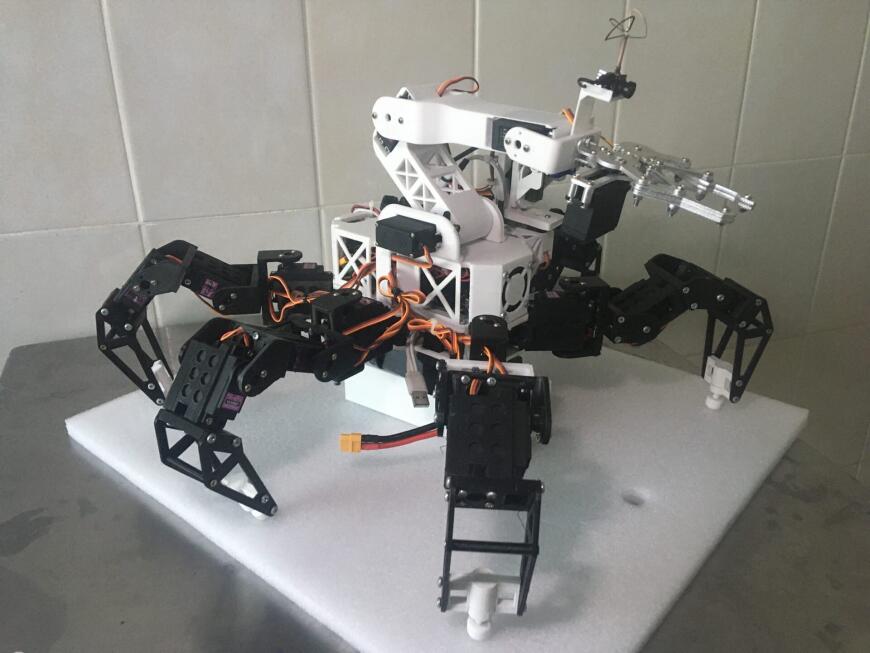

В данной модели применяется большее количество приводов, улучшенная модель ног и платформы, повышающая мобильность и гибкость. В данном роботе используется микроконтроллер Arduino mega 2560, усовершенствованная схема питания и реализовано беспроводное управление. Для создания данного проекта потребовалось приобретение 3Д принтера, мультиметра и различного CAD инструмента, объединяющий процессы разработки проекта. В данный момент на гексаподе не установлен манипулятор, но для него предусмотрено место крепления, а так же запас питания и вычислительные мощности контроллера управления.
Для изготовления деталей гексапода был приобретен FDM (Fused Depsition Modelling) 3д принтер Flying Bear Ghost 4s. Данный принтер является одним из лучших в своей ценовой категории. Он печатает пластиками PLA,Pet-G, ABS и другими. Хорошая кинематика этого принтера предотвращает повреждение деталей во время печати. Специально подогревающийся стол улучшает адгезивные свойства для лучшего сцепления детали с его поверхностью.
Основным материалом для изготовления был выбран PET-G так как его физико-механические свойства отлично подходят для гексапода. Демпферы были напечатаны из материала Bflex.
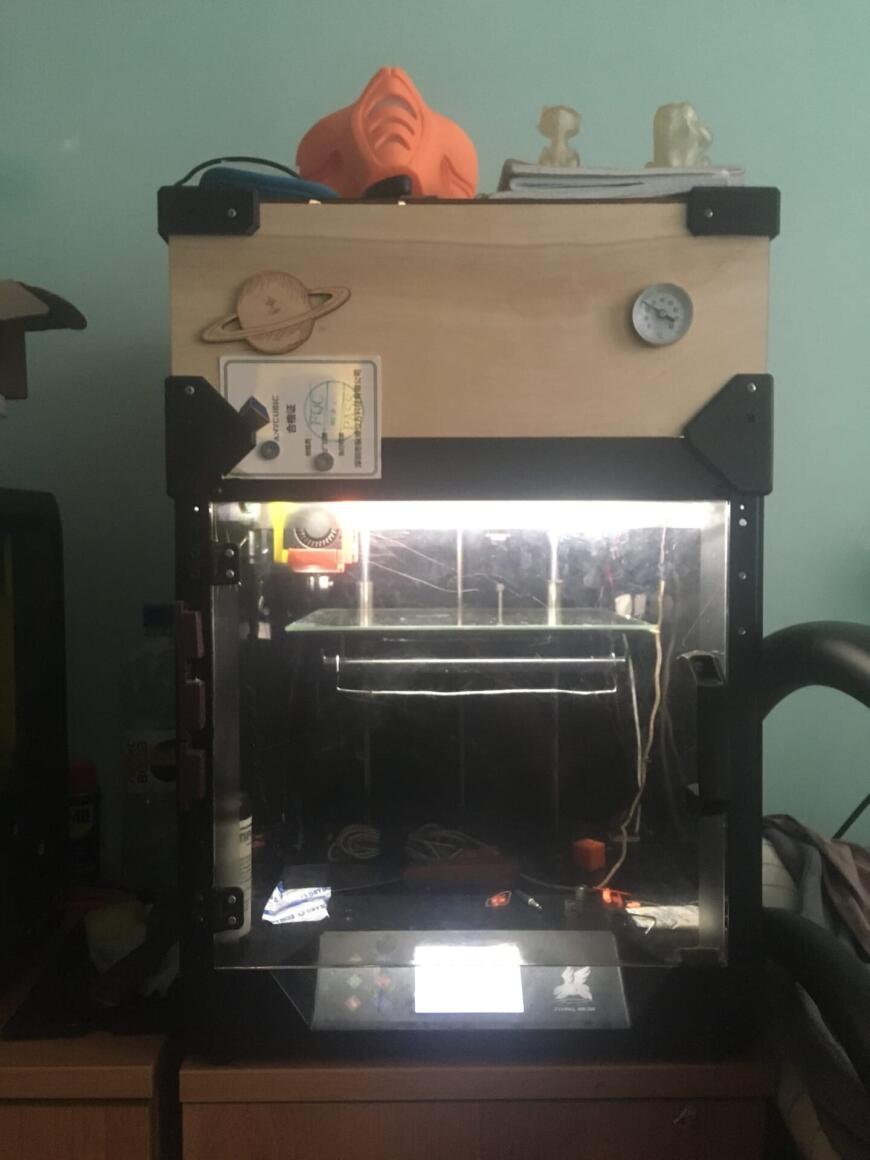
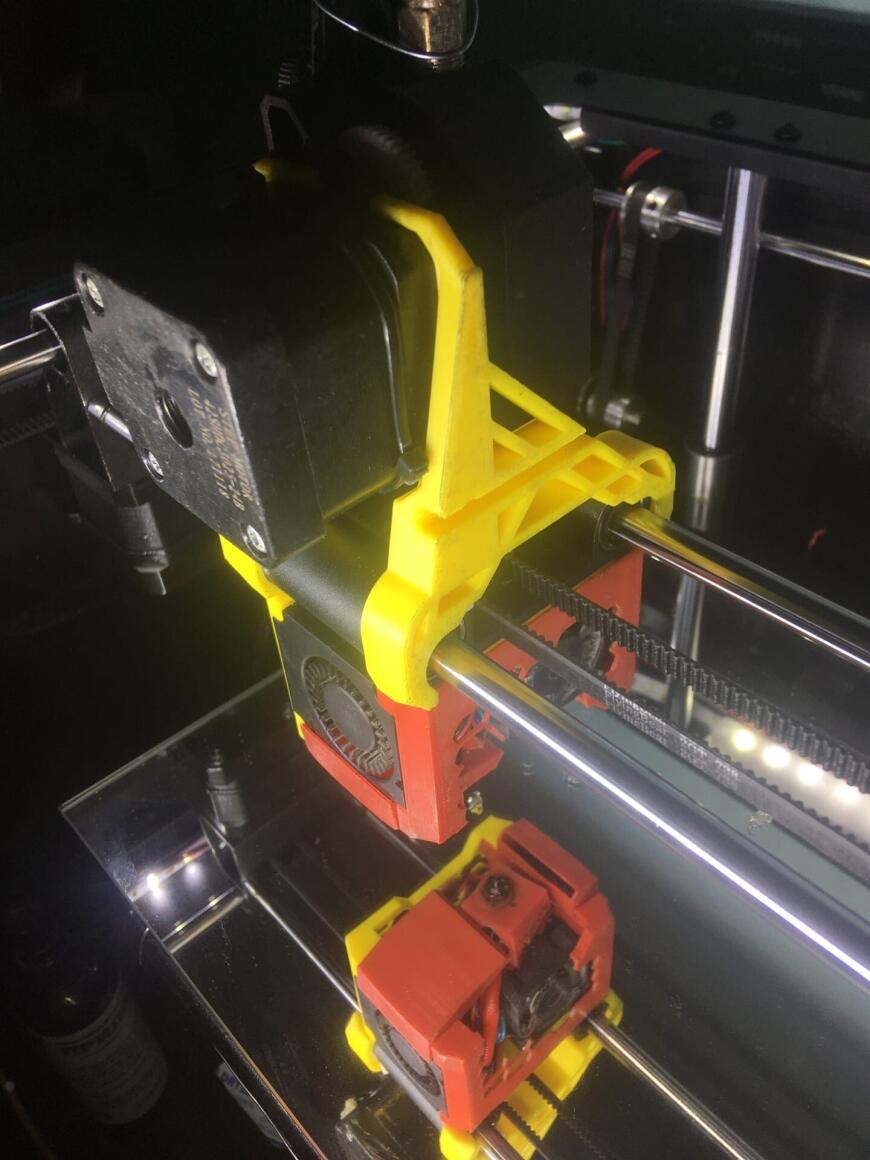
Для улучшения качества напечатанных моделей, была доработана конструкция принтера. Вместо изначально установленного bowden экструдера, был напечатан и установлен direct. Откалиброван PID для стола и нагревательного элемента, шаги для мотора экструдера, заменены драйвера для шаговых двигателей на осях X,Y,E. Собрана термокамера из верхнего бокса (фанера) и передней дверцы (акрил), заменено стоковое стекло на зеркало 3мм.
Так же был проведен расчет коэффициента усадки для точной печати отверстий.
Далее о создании данной модели гексапода

3д модель гексапода :

Робот разрабатывался на основе аналогичных существующих моделей, в том числе и роботов-гексаподов. В результате работы были значительно улучшены различные модули и усовершенствована конструкция ног, что потребовало использования 18 сервоприводов. Это позволило повысить мобильность и гибкость робота. Чертежи и модели частей корпуса робота полностью разрабатывались в CAD системе и производились при помощи аддитивных технологий. По 3д моделям можно производить технологические расчеты и использовать при дальнейшем производстве.

На концы ног разработаны и установлены наконечники-демпферы собственного производства. Они представляют собой пластиковый корпус с пружиной внутри. Наконечник предотвращает поломку элементов ноги во время удара, уменьшает нагрузку на вал редуктора сервопривода и устраняет его деформацию и износ, а так же избавляет от сильного стука во время перемещения. Улучшена конструкция платформы, благодаря чему на нее можно устанавливать манипулятор, кулер для охлаждения, а так же стабилизатор для FPV камеры.
В гексаподе используется микроконтроллер Arduino mega 2560 с дополнительно установленной Raspberry pi 4. Это позволяет плавно и с большой точностью перемещать робота. Так же были усовершенствованы: схема питания, которая позволила включать и выключать робота при помощи контроллера, и беспроводное управление, которым осуществляется движение робота, манипулятора и управление камерой. Присутствует возможность подключиться к гексаподу дистанционно по средством передачи данных wi-fi, а так же можно расширить функционал и управлять мехатронным устройством дистанционно. Робот изготовлен с учетом промышленных стандартов во избежание травматизма, на нем располагается кнопка аварийной остановки, а вся электроника помещена корпус. Светодиодный индикатор для отладки и отображения состояния робота собран и представлен на фотографии.

Манипулятор

Одним из основных частей гексапода является манипулятор. Он выполнен из PET-G пластика на 3д принтере. Манипулятор и его кинематика проектировались в CAD системе по собственным чертежам и наработкам. Манипулятор состоит из 3 звеньев и захвата, которые вращаются в одной плоскости. В роли двигателей используются сервоприводы, крутящий момент которых >10кг/см. Манипулятор способен поднимать объекты массой до 500 грамм и до 1000 в режиме удержания. Так же в роботе установлена FPV камера, которая позволяет управлять роботом дистанционно и камера для машинного зрения, обеспечивающая распознавание объектов и дальнейшим выводом их на монитор.
Программирование
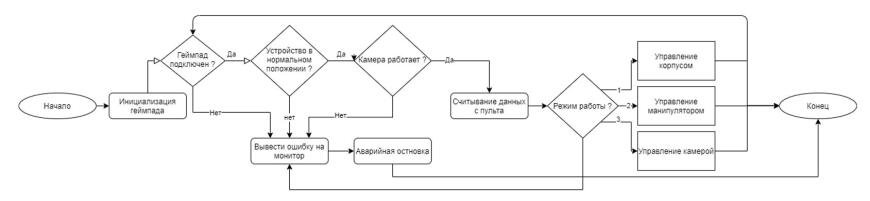
Программирование производилось в среде разработки Arduino IDE и sublime_text . Код состоит из функций, которые контролируют модули, и функций, которые ими управляют. В программе реализованы аварийные остановки и вывод ошибок при не правильном подключении или во время отклонений наклона корпуса от нормы. >60% программного обеспечения разрабатывалось вручную.
Для управления гексаподом используется геймпад от PlayStation2 с ресивером. Он позволяет точно управлять движением, выбирать различные типы походки и выбирать режимы управления. Беспроводное управление реализуется за счет встроенного радио модуля на 2.4гц . Приемник устанавливается на верхнюю часть платформы корпуса гексапода и подключается к Arduino mega (для передачи сигнала используются пины 2-5, а так же пины 3.3в и Gnd для питания).
В качестве источника питания для гексапода используются li-ion аккумуляторы. Для стабилизации напряжения используется стабилизатор бортового напряжения SBEC.
Аккумуляторы
В качестве батареи используются li-ion аккумуляторы формата 18650. К преимуществам можно отнести:
- Высокая энергетическая плотность.
- Отсутствие эффекта памяти.
- Низкий удельный вес.
Аккумуляторы собираются последовательно в 3s батарею (12.6в).
Стабилизатор
В роли стабилизатора используется стабилизатор бортового напряжения YEP 20A HV (2 ~ 12S) SBEC. По причине того, что на каждом сервоприводе просадка напряжения достигает 0.3в., суммарно, со всех двигателей, просадка по напряжению принимает значение до 6в., вследствие чего многие приводы не работают. Так же каждый привод потребляет до 800мА, опытным путем было выявлено, что суммарный потребляемый ток примерно 15А.
Исходя из вышеупомянутых проблем, стабилизатор должен соответствовать нескольким требованиям:
• Максимальный ток 20А
• Выходное напряжение 5-7.2в
Данным требованиям соответствует стабилизатор бортового напряжения YEP 20A HV
В этом проекте мы рассмотрим создание на основе платы Arduino небольшого робота, который умеет ходить и танцевать. Проект имеет целью научить вас создавать подобных роботов на основе Arduino, а также программировать сервомоторы для подобных применений. В конце этой статьи вы научитесь создавать шагающего и танцующего робота, который умеет принимать команды от мобильного телефона на Android чтобы выполнять некоторый заранее определенный набор действий.

Также вы можете использовать программу, приведенную в конце статьи, чтобы управлять движениями робота с помощью положения его сервомоторов и используя для этого последовательный монитор (Serial monitor). Если у вас есть 3D принтер, то вы можете сделать этот проект очень впечатляющим, но если у вас его нет, то вы можете изготовить компоненты корпуса робота из любого доступного материала: пластмасса, дерево, жесткий картон и т.д.
Необходимые компоненты
- Плата Arduino Nano (купить на AliExpress).
- Сервомотор SG90 (4 шт.) (купить на AliExpress).
- Bluetooth модуль (HC-05/HC-06) (купить на AliExpress).
- Соединительные колодки (типа папа).
- 3D принтер (опционально).
Внешний вид всех необходимых комплектующих для сборки этого робота вы можете увидеть на следующем рисунке.

Как вы видите, этот робот требует минимального количества электронных компонентов – это сделано с той целью чтобы максимально удешевить проект. Проект имеет обучающую цель и не претендует на то, чтобы его можно было использовать в каких-нибудь практических применениях.
Печать на 3D принтере необходимых компонентов
3D принтеры, появившиеся сравнительно недавно, дают большой простор для разнообразных DIY (сделай сам) проектов.
Мы в нашем проекте полностью напечатали тело робота на 3D принтере. Все необходимые STL файлы для этого вы можете скачать по следующей ссылке. Вы можете загрузить эти файлы программным обеспечением вашего 3D принтера (например, Cura) и непосредственно напечатать их. Принтер, который мы использовали, называется FABX v1, который доступен по приемлемой цене и может печатать в объеме до 10 кубических сантиметров. Мы использовали программное обеспечение Cura чтобы напечатать STL файлы. Мы сделали следующие настройки в данном программном обеспечении для печати нашего проекта:

Напечатанные нами части корпуса робота выглядят следующим образом:

После печати удостоверьтесь в том, что отверстия на ногах и туловище робота достаточны для того, чтобы через них прошел шуруп (винт). Если это не так, то расширьте их с помощью шила.
Работа схемы
Схема устройства представлена на следующем рисунке.

Мы использовали перфорированную плату чтобы облегчить создание соединений между компонентами схемы. Также следите за тем, чтобы созданная вами плата помещалась внутрь корпуса робота.
Сборка робота
После того как электрические соединения в схеме робота сделаны и корпус робота готов можно приступать к его окончательной сборке. Перед закреплением сервомоторов убедитесь в том что их оси повернуты на углы, указанные в следующей таблице:
| Motor Number (номер мотора) | Motor place (место мотора) | Motor position (позиция мотора) |
| 1 | Left Hip motor | 110 |
| 2 | Right Hip motor | 100 |
| 4 | Right Ankle Motor | 90 |
| 5 | Right Hip motor | 80 |
Эти углы можно выставить с помощью программы, приведенной в конце статьи. Просто загрузите программу в плату Arduino (когда все соединения уже сделаны) и напечатайте в окне последовательного монитора (serial monitor) (бодовая скорость: 57600):
Окно последовательного монитора у вас после установки всех сервомоторов в необходимые позиции должно выглядеть примерно так:

После того как оси сервомоторов повернуты на необходимые углы смонтируйте их на роботе как показано на следующем рисунке.

Если у вас возникли какие либо затруднения, то посмотрите видео, приведенное в конце статьи. После того как робот собран можно приступать к написанию программы чтобы заставить его танцевать.
Объяснение программы для Arduino
Если вы не уверенно чувствуете себя в программировании действий сервомоторов, то вначале рекомендуем изучить следующую статью – подключение сервомотора к плате Arduino. Также вы можете посмотреть на нашем сайте все статьи, связанные с управлением сервомоторами.
Полный текст программы приведен в конце статьи, либо вы можете скачать его по этой ссылке. Здесь же объяснены наиболее важные части программы. С помощью этой программы можно управлять движениями робота при помощи монитора последовательной связи (serial monitor) или технологии Bluetooth. Также вы на основе этой программы можете запрограммировать свой собственный набор движений для робота.
В следующих строчках кода мы укажем плате Arduino какие сервомоторы к каким ее контактам подключены. В нашем случае сервомоторы 1, 2, 4 и 5 подключены к контактам 3, 5, 9 и 10.
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.

Создавая шагающего робота, конструктор должен ответить на множество вопросов. Некоторые из них носят общий характер, но некоторые необходимо разбирать детально. В статье мы описали наиболее важные вопросы, связанные с дизайном и сборкой шагающих мобильных роботов.
Мы сосредоточились в этой статье на самом двигательном аппарате, и на возможных технических решениях, вытекающих из принятых допущений. Классификация шагающих роботов может варьироваться в зависимости от выбранных критериев.
Некоторые критерии тесно связаны, например, с количеством лап или ног, а также с возможными типами походки. Итак, давайте посмотрим на приведенные выше классификации.
Модели движения
Если движение шагающего робота похоже на походку животного, то такая модель называется биологической моделью. Конструирование таких роботов началось с наблюдения и попытки имитировать походку различных существ. На рисунке ниже показано типичное расположение лап насекомых, рептилий и млекопитающих.

Типичное расположение лап животных: а) рептилия, б) насекомое, в) млекопитающее.
Из рисунка виден важный критерий — это высота центра тяжести.
Типы ног
Другой критерий, связанный с биологической структурой, — это тип ног или лап. У робота могут быть одинаковые ноги, у него могут быть пары разных ног (по длине и / или форме). Это связано не только с их выбором, но и с возможными типами движения. Проще, и обычно дешевле, сделать робота с одинаковыми ногами.
Следующий, и последний критерий, связан с расположением ног по отношению к туловищу. Здесь снова у нас есть несколько вариантов:
лапы, расставленные симметрично по кругу

или лапы, расставленные по обеим сторонам робота, т.е. лапы находятся под телом — как у млекопитающего.

Своего рода стабильность
Еще один важный критерий — это тип устойчивости. Это неразрывно связано с количеством лап. Различают следующие типы устойчивости: статически стабильная походка, динамически стабильная походка и квазистатическая стабильная походка.
Статически стабильная походка
Статически стабильная походка — это походка, при которой робот может быть остановлен в любой момент, без потери равновесия. Классическим примером этого типа движений является походка шестиногих роботов.
Динамически стабильная походка
Противоположность этому типу движений — динамически устойчивая походка. В этом случае, только в определенные моменты движения, робот может быть остановлен, в другие, сохраняется стабильность походки за счет динамики движения. Остановка в такой момент приведет к опрокидыванию робота.
Квазистатическая устойчивая походка
Количество ног робота
В этом случае крепим любое количество ног. Их минимальное количество может быть равно нулю — в этом случае это будут, например, змееподобные ползучие роботы. Однако, когда мы говорим о педипуляторах (шагающих роботах), мы имеем в виду роботов с определенным количеством лап или ног — одной, двумя, четырьмя, шестью и более.
Одноногий или однолапый робот
В случае с одноногим роботом мы можем говорить только об одном виде походки — прыжках. Это динамический тип движения. Только благодаря большой мощности приводов, очень быстрой системе управления и датчикам, а также сложному алгоритму робот не опрокидывается при движении.

Двуногие роботы
Двуногие или двулапые роботы характеризуются динамически устойчивой походкой. Обычно ходят на согнутых ногах. Биологический образец таких роботов — человек.

Они также могут двигаться квазистабильным статическим движением. В этом случае структура ноги, а именно большая ступня, позволяет распределять баланс силы на большой площади, под которой также находится центр тяжести робота. Кроме того, относительно большая масса одной ноги позволяет балансировать вместе с телом во время движения и обеспечивает противовес туловищу.
Четвероногие роботы
Квадропеды — роботы с четырьмя ногами или лапами. В этом случае биологический образец обычно — млекопитающие или рептилии. Эти роботы могут двигаться как динамически стабильно (галопом), так и статически (перемещая одну ногу за один раз). Шестиногие роботы также могут двигаться как статически, так и динамически.
Таким образом, алгоритм движения является наиболее простым в программировании из всех перечисленных групп, единственная трудность может заключаться в большом количестве степеней свободы.
Многоногие роботы
Также есть группа многоногих роботов с более чем шестью ногами. В таком решении (до тех пор, пока мы должны контролировать каждую ногу отдельно) система управления усложняется. Эти роботы передвигаются статически стабильной походкой. Максимальное количество возможных шагов определяется формулой, приведенной Макги в 1968 году :
k — количество ног
N — количество возможных видов походки
! — означает факториал
Для молодых адептов робототехники, которые могут не знать эту математическую функцию — мы привели дополнительное пояснение:
! — факториал — это произведение всех чисел от 2 до n.
Пример:
6! = 2 ∙ 3 ∙ 4 ∙ 5 ∙ 6 = 720.
Для шестиногого робота результат формулы МакГи:
(2 ∙ 6-1)! = 11! = 39 916 800 возможных шагов.
Тип походки
Последний из этих критериев — тип походки. Приведенная выше формула дает максимально возможное количество шагов, но не все роботы могут двигаться всеми перечисленными способами. Это ограничение проистекает из используемых приводов, выбранного устройства движения и его ограничений, а также ограничений системы управления, особенно ее скорости.
Если у привода нет большого запаса мощности и динамики, то робот может двигаться только статически устойчивой походкой. Конструкция ног и механические связи между отдельными ногами (или степени свободы одной ноги) также ограничивают количество возможных аллюров. Это количество может быть ограничено одним типом.
Волновое движение очень популярно и легко реализуемо. Указанная здесь последовательность смены ног является циклической. Эту походку можно представить в виде диаграмм походок. Примеры схем представлены на рисунках ниже. Фаза движения ноги называется фазой вытягивания, а период, в течение которого нога соприкасается с землей, называется фазой рефрактерности. Эту походку еще называют периодической.
Примеры схем походки четвероногого и шестиногого роботов:
Эти походки используются на прямых и плоских поверхностях. Их преимущество — простота реализации. Другой вид — свободная походка — вольный стиль . В этом случае решение о том, какую ногу переместить и куда поставить, принимается постоянно. Такая походка требует сложного алгоритма управления, датчиков и быстрой системы управления. Её преимущество — очень широкий спектр применения — она подходит для использования на сложной местности.
Последний вид походки — это движение проводника. Следующая нога ставится на то место, где ранее находилась предыдущая нога. Её применение аналогично свободному движению.
Проектирование робота
При проектировании робота мы должны выбрать конкретный привод:
- электродвигатели
- пневматические приводы
- гидроцилиндры
У каждого из них есть свои достоинства и недостатки. В мобильных роботах (особенно любительских) чаще всего используются электродвигатели — электродвигатели постоянного тока или сервоприводы. Ими очень легко управлять, а для питания достаточно обычной батарейки. Оборудованные ими роботы могут быть автономными.
Другое дело ноги или лапы — их форма, длина, расположение, количество степеней свободы.
Важным вопросом является соотношение количества приводов к количеству опор. В простейшем случае — шестиногом роботе — мы можем использовать от двух до восемнадцати приводов. Два двигателя связаны с наибольшим ограничением количества возможных аллюров и большим количеством механических связей между ногами. Но во втором случае, если у нас по 3 привода на ногу, то с точки зрения робототехники это решение оптимально.
Примеры шестиногих роботов с двумя, тремя и восемнадцатью степенями свободы показаны на следующих рисунках:
На рисунке а показан робот с двумя степенями свободы. Механическая связь между ногами по обе стороны от робота позволяет ему двигаться вперед и поворачиваться. Система управления такого робота аналогична системе управления колесного робота с двумя независимо управляемыми колесами.
Робот с таким строением ног может двигаться только одним типом походки. На рисунке б можно увидеть конструкцию робота с тремя степенями свободы. В этом случае средняя пара ног уравновешивает робота так, чтобы две оставшиеся ноги с одной стороны были подняты вверх — они находятся в фазе вытягивания. При наклоне в другом направлении стороны меняются местами. Как видно на рисунке, внешние ноги с обеих сторон жестко соединены. Опять же, возможен только один тип движения, но он немного сложнее, чем в предыдущем случае.
Последний пример — робот с несколькими степенями свободы (рисунок в). Такое решение дает возможность независимо управлять подъемом и горизонтальным перемещением каждой ноги.
В случае 2 степеней свободы на ногу, один привод отвечает за вертикальное движение, а другой за горизонтальное. Разница между роботом с 2 степенями свободы на ногу и 3 степенями свободы на ногу в том, что в последнем случае можно двигаться боком (по типу краба). В первом поступательное движение может происходить только вперед или назад. В зависимости от запаса энергии приводов такое решение позволяет реализовать статическую походку (с малым запасом мощности) и динамическую походку (с большим запасом мощности).
На рисунках г, е можно увидеть роботов с одной степенью свободы. Конструкция ног идентична конструкции робота с двумя степенями свободы. Отличие заключается в конструкции трансмиссии и замене одного двигателя муфтой свободного хода, передающей вращение только в одном направлении.
Такое решение ограничивает возможные движения для ходьбы вперед и поворота в сторону ( рисунок е).
Расположение ног
Также немаловажным является размещение ног на теле робота. Чтобы робот не упал, надо помнить о положении центра тяжести. Это очень важно.
Опорный многоугольник — это многоугольник, вершинами которого являются точки, в которых ноги фактически соприкасаются с землей. Эта цифра меняется в каждый момент движения. Например, для четвероногого робота с симметрично распределенными ногами, когда все ноги соприкасаются с землей, опорный многоугольник представляет собой прямоугольник или квадрат; если одна нога поднята — многоугольник опоры становится треугольником.
При проектировании робота, который будет двигаться в статически стабильном движении, центр тяжести должен быть расположен таким образом, чтобы он никогда не выходил за пределы многоугольника. Чтобы повысить устойчивость и исключить влияние всех дополнительных динамических эффектов (например, сам факт движения ноги), применяется дополнительный запас прочности. Он заключается в построении ног и корпуса, при котором центр тяжести не приближается к сторонам многоугольника опоры.
Минимальное расстояние между ближайшей стороной текущего опорного полигона и центром тяжести называется статическим запасом устойчивости. Фигура, на следующем рисунке, показывает примерную последовательность опорных полигонов во время движения четвероногим роботом. На этом рисунке также показан центр тяжести робота.

Диаграммы походки
Наконец, мы хотели бы вернуться к вопросам схемы походки. Это не будет проблемой для роботов, которые могут двигаться только одним типом походки. Однако при разработке алгоритма походки робота с большим количеством степеней свободы, существует некоторая проблема.
Мы представили эту проблему на следующем рисунке а виде диаграммы. Существенным различием между двумя представленными вариантами является дополнительное пустое поле в периоде походки. В этот момент все ноги находятся на земле, а туловище выталкивается вперед на всю длину шага. Во время фазы стояния на одной ноге, другие движутся в обратном направлении 1/5 длины шага.

Системы управления — отдельная проблема. Простое перемещение даже роботов со многими степенями свободы и поддержкой нескольких простых датчиков расстояния может быть реализовано в восьмиразрядных микроконтроллерах. Написание программы на языках BASIC (bascom, BASIC stamp, BASIC micro) также не является большой проблемой для среднего опытного программиста.
Вывод
Надеемся, материал вам понравился. Не стесняйтесь узнавать больше о робототехнике, изобретать и конструировать собственных шагающих роботов. Конструкция такого робота доставит вам большое удовлетворение и гордость за себя, особенно когда заработает все как надо.
Читайте также: