
Робот мусорщик своими руками
Обновлено: 01.07.2024
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.

Обработка мусора — одна из областей, куда в течение последних лет активно приходят робототехнические решения. Число проектов из разных стран исчисляется десятками. Среди них, например, промышленные роботы-сортировщики от финской компании ZEN Robotics и американской AMP Robotics (и тот и другой представляют собой манипуляторы, которые уже работают на нескольких заводах), сортировщик от американской Waste Robotics, способный выхватывать с конвейера пластиковые пакеты с мусором, робот — подводная лодка от Rosalia Project (США), способный собирать мусор на дне водоемов.

Сырье и энергия
Другой давно освоенный метод — пиролиз, цепочка химических реакций полного разложения полимеров, которая протекает при высоких температурах (около 650°С) без доступа кислорода. В результате пиролиза получаются синтетические углеводороды, которые после дополнительной очистки могут использоваться в качестве топлива в двигателях внутреннего сгорания.
Использование сортированного переработанного пластика фактически не отличается от работы с обычным сырьем. За счет простоты сортировки ПЭТ-отходов от прочих полимерных отходов (плотность ПЭТ такова, что он будет плавать на поверхности воды), а также низкого числа циклов их переработки вторичный ПЭТ сохраняет высокое качество
По оценке Transparency Market Research, объем мирового рынка переработки пластика, который в 2017 году составлял $34,8 млрд, в ближайшие восемь лет будет расти на 6,8% в год. Однако затраты на сбор и отделение пластика от остального бытового мусора составляют в среднем около двух третей общей себестоимости переработки полимеров. Таким образом, центральной проблемой в борьбе с пластиком является не переработка как таковая, а именно его сбор.

Роботы-сортировщики способны отличать пластик от прочих типов отходов с помощью нейросетей, которые анализируют форму и степень прозрачности предметов: например, имея в своей базе данные о нескольких типах пластиковых стаканчиков, сопоставляют их образ с тем, что движется по конвейеру, и выхватывают манипулятором все, что соответствует этому образу. При этом нейросеть учится определять стаканчики, даже если они смяты или разорваны; база пластиковых предметов постоянно пополняется.
Снизив стоимость сбора пластиковых отходов, владельцы роботов-мусорщиков смогут зарабатывать на сборе и поставках отходов на перерабатывающие заводы. Развитие робототехники, скорее всего, приведет к настоящей охоте за пластиком.
Робот-акула для ловли океанского пластика WasteShark
Год создания: 2016
Разработчик: RanMarine (Нидерланды)
Услугами робота (всего их выпущено около сотни) пользуются в основном муниципалитеты городов (не только в Европе, но и, например, в ЮАР), которые хотят очистить прибрежные воды от тонн находящегося в них мусора.
Промышленный робот-сортировщик Max-AI
Год создания: 2015
Разработчик: Sadako Technologies (Испания) и Bulk Handling Systems (США)
Год создания: 2016
Разработчик: CleanRobotics (США)

Роботы бывают самые разные, от игрушек до сложных машин и применяются в различных целях. Нас всегда интересовало, как они устроены, как работают, кто их придумал, когда они появились. Всегда интересно узнать принцип работы сложных механизмов, чтобы можно было в будущем самому их воспроизвести. Наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни. Поэтому целью моей работы: является расширить знания в области науки и техники, а именно — робототехники, попробовать собрать простейшую модель робота–уборщика для вытирания пыли.

РОССИЙСКАЯ ФЕДЕРАЦИЯ
НАЦИОНАЛЬНАЯ ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА
МЕЖРЕГИОНАЛЬНЫЙ ФЕСТИВАЛЬ ИССЛЕДОВАТЕЛЬСКИХ РАБОТ
Курганов Александр Александрович
Трошина Наталья Георгиевна
учитель начальных классов
РОССИЙСКАЯ ФЕДЕРАЦИЯ
НАЦИОНАЛЬНАЯ ОБРАЗОВАТЕЛЬНАЯ ПРОГРАММА
МЕЖРЕГИОНАЛЬНЫЙ ФЕСТИВАЛЬ ИССЛЕДОВАТЕЛЬСКИХ РАБОТ
План исследования
Сегодня во многих сферах деятельности, человека заменяют автоматические устройства, которые способны не только выполнять много разных операций, но и оперативно переобучаться с одной операции на другую.
Роботы бывают самые разные, от игрушек до сложных машин и применяются в различных целях. Нас всегда интересовало, как они устроены, как работают, кто их придумал, когда они появились. Всегда интересно узнать принцип работы сложных механизмов, чтобы можно было в будущем самому их воспроизвести. Наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни. Поэтому целью моей работы: является расширить знания в области науки и техники, а именно — робототехники, попробовать собрать простейшую модель робота–уборщика для вытирания пыли.
Гипотеза: предположим, что изучив различные модели современных роботов, возможно, смоделировать домашнего робота помощника.
Исследование проводилось поэтапно в течение трех месяцев (октябрь – декабрь 2014 года).
1 этап (октябрь): выбор темы исследования, формулирование цели и задач, определение методов исследования, работа с научной литературой и периодической печатью по проблеме.
2 этап (ноябрь): Конструирование и сборка модели робота.
3 этап (декабрь): Презентация созданной модели робота – уборщика для вытирания пыли.
Библиография.
2.1 Описание и устройство робота………………………………………………………………. 8
Список использованной литературы…………………………………………. 10
1- этап конструкции робота …………………………………………. I
2 этап - конструкция вибрационного двигателя.………………………………………………. II
3 этап - крепление вибрационного двигателя к пластиковой тарелке…..……………………..III
Сегодня во многих сферах деятельности, человека заменяют автоматические устройства, которые способны не только выполнять много разных операций, но и оперативно переобучаться с одной операции на другую.
Роботы бывают самые разные, от игрушек до сложных машин и применяются в различных целях. Нас всегда интересовало, как они устроены, как работают, кто их придумал, когда они появились. Всегда интересно узнать принцип работы сложных механизмов, чтобы можно было в будущем самому их воспроизвести. Наука и техника не стоит на месте, постоянно создаются новые, все более совершенные роботы для различных областей жизни. Поэтому целью моей работы: является расширить знания в области науки и техники, а именно — робототехники, попробовать собрать простейшую модель робота–уборщика для вытирания пыли.
Задачи.
Познакомится с историей создания роботов;
Проанализировать научно-популярную литературу, для определения уровня развития робототехники;
Презентовать созданную модель робота – уборщика для вытирания пыли.
Объект исследования: процесс создания модели робота-уборщика.
Предмет исследования: моделирование простейшую модель робота-уборщика.
Методы исследования:
Сбор и анализ литературных источников, интернет - ресурсов и полученных знаний;
Гипотеза: предположим, что изучив различные модели современных роботов, возможно, смоделировать домашнего робота помощника.
1. Теоретическая часть.
1.1. История создания робота.
С момента своего появления полвека назад роботы прошли путь от примитивных механизмов до сложных, эффективных устройств, во многом превзойдя по своим возможностям человека. В ближайшие десятилетия всё более совершенные роботы станут незаменимыми помощниками людей и смогут взять на себя обеспечение большей части потребностей цивилизации.
1.2. Как роботы помогают людям
Современные мобильные роботы работают во вредных или опасных для человека условиях. Например, при ликвидации последствий аварий, при работе с взрывоопасными предметами. Использование мобильных роботов в таких условиях позволяет человеку не рисковать своей жизнью и здоровьем.
Промышленные роботы
Появление станков с числовым программным управлением привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Бытовые роботы
Одним из первых примеров удачной массовой промышленной реализации бытовых роботов стала механическая собачка корпорации Sony. В сентябре 2005 в свободную продажу впервые поступили первые человекообразные роботы производства фирмы Mitsubishi. Робот стоимостью $15 тыс. способен узнавать лица, понимать некоторые фразы, давать справки, выполнять некоторые секретарские функции, следить за помещением. Всё большую популярность набирают роботы-уборщики, по своей сути — автоматические пылесосы, способные самостоятельно прибраться в квартире и вернуться на место для подзарядки без участия человека.
Исследовательские роботы.
Они служат для поиска, сбора, переработки и передачи информации об исследуемых объектах. К числу таких объектов относятся космическое пространство, поверхности планет, подводное пространство, подземные полости такие, как шахты и пещеры.
Например, без робота Dante II человек никогда бы не заглянул в кратер действующего вулкана, а без робота Sojourner наши знания о Марсе были бы намного более скудными. Этот агрегат в 1997 году высадился на поверхность планеты и передал на Землю огромное количество фотоснимков.
Военные роботы.
Эти роботы, работают в специальных условиях и позволяют, не рискуя жизнью людей, осуществлять различные операции спасательного и антитеррористического характера.
Сегодня в основном речь идет лишь о дистанционно управляемых системах. Например, беспилотные летательные аппараты, роботы-сапёры, танки, и наземные бронетранспортеры-разведчики. Один такой беспилотный летательный аппарат может "присматривать" с неба за целой страной.
Роботы в медицине.
Роботы всё больше используются в медицине. В некоторых областях они уже могут работать более эффективно, с большей точностью и меньшей вероятностью ошибки, чем доктора люди. Скоро можно будет совместить робохирургов с технологиями диагностирования (экспертные системы уже давно используются для постановки диагнозов, анализа рентгеновских снимков и т. п.).
Спортивные роботы.
Одним из наиболее эффектных и зрелищных направлений спортивной робототехники является футбол роботов. Многими специалистами утверждается, что научить машину играть в футбол гораздо труднее, чем игре в шахматы. Помимо футбола существует множество иных состязаний роботов: робосумо, спринт, ориентирование на местности, дуэли и т.д. 1
Роботы – путешественники.
К спортивным роботам можно отнести роботов-путешественников, задача которых - самостоятельно доехать из одной точки в другую. Маршрут может быть ограничен специальным полигоном, а может быть длиной в десятки и сотни километров.
Кроме того, роботы должны выполнять определенные задания, например, к каждому роботу прицеплен груз и необходимо доставить его в определенные точки, отмеченные на карте. 2
Как устроены роботы и как они работают.
Роботы бывают разных размеров от микроскопических – похожих на маленьких мушек, до огромных – размером с многоэтажный дом. В каждом роботе есть подвижные части – шарниры – похожие на суставы человека, при помощи которых робот может двигаться. Конечности робота, при помощи которых он может брать, поднимать, опускать и перемещать предметы или выполнять какие-нибудь работы, называются манипуляторами. Роботы могут передвигаться по земле, по горам, могут опускаться под воду, летать по воздуху.
Силу и способность двигаться роботу дают электрические моторы или двигающиеся при помощи воздуха или жидкости цилиндры, которые называются приводом. 3
Некоторыми роботами люди могут управлять, находясь от них очень далеко, при этом команды роботу человек посылает по радиосвязи или по подключенному к роботу кабелю.
Некоторые роботы могут выполнять задания сами, без управления человеком. Такие роботы запрограммированы человеком на самостоятельную работу. Про таких роботов говорят, что они обладают искусственным разумом или интеллектом.

Финские инженеры сделали прорыв в проблеме переработки разных видов отходов, создав робота с искусственным интеллектом, который способен сортировать мусор. Роботизированная технология значительно эффективнее ручной, ускоряет процесс сортировки и переработки, и снижает общие издержки.
Создателями машины для сортировки отходов стали разработчики из компании ZenRobotics. Их ZenRobotics Recycler — это робот с искусственным интеллектом, основанный на адаптивном алгоритме поиска. Для создания интеллекта применялся принцип функционирования мозжечка человека.
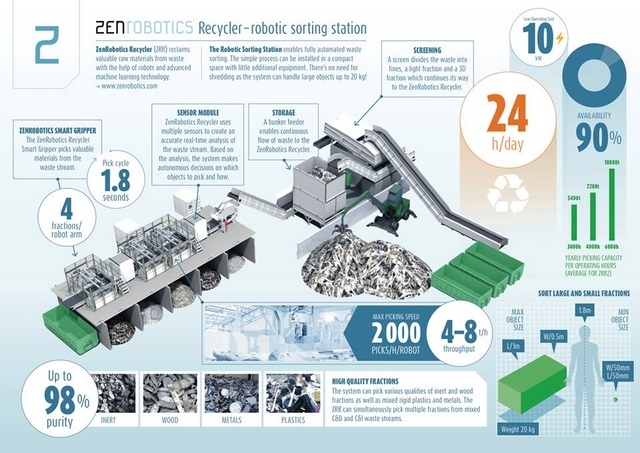
Робот ZenRobotics Recycler с высокой точностью сортирует различные виды мусора: древесину различных сортов, картон, пластмассу, минералы, а также строительный мусор, что сложно реализуемо для ручной работы. Высокая аккуратность и быстрота работы — вот как можно охарактеризовать этого робота.
Всего один ZenRobotics Recycler может перерабатывать до 12 млн. ед. строительного мусора в год. Благодаря этому значительно повышается эффективность предварительной сортировки отходов различных типов.

На видео показано как он шустро разделяет мусор из камней и дерева, иногда металла.
А как же всё остальное, пищевые отходы, бутылки, битое стекло, пластик всяких форм, пакеты с бытовым мусором и многое многое другое которое течет, тухнет и воняет так что та девочка менеджер точно бы не смогла без противогаза ходить вдоль конвейера с умным видом
Почему нельзя сразу контейнер поставить под сортированный мусор, а не возить его трактором в ковше?
Теперь имигрантам и на свалку будет не устроиться. Еще больше обсосов будет на пособии сидеть
В принципе, просто собрали известные технологии и оптимизировали свои затраты.
Спектрометр и металлодетектор позволяют довольно точно определить тип материала, с помощью камеры можно определять форму, алгоритмы по хватаю предметов уже есть давно. Я даже не уверен нужен ли тут ИИ и вообще используется ли на самом деле.
А забастовки у них есть? Если нет , то они очень скучно живут.
С одной стороны роботы это хорошо, но с другой это приведет к сильнейшей безработице и еще более сильному расслоению общества. А уж когда армию роботизируют или нацгвардию, то можно будет усмирять непокорных не задумываясь о морали, роботу будет все равно кого убивать - террориста или женщину с ребенком
Познакомьтесь с роботом-химиком, который может проводить собственные эксперименты

Робот, которого обычно можно найти на конвейере автомобилей, можно модифицировать для работы в химической лаборатории рядом с людьми. Об этом сообщают в статье, опубликованной вчера в журнале Nature. Робот связан с алгоритмами машинного обучения, что позволяет ему выбирать, какие эксперименты проводить при выдвижении гипотез.
Автоматизированные химические установки становятся все более распространенными как в академических, так и в промышленных лабораториях. Они сочетаются с поточным анализом и принятием решений, чтобы обеспечить определенную степень автономии. Однако химические роботы изготавливаются на заказ и требуют специализированных интерфейсов с лабораторным оборудованием и аналитическими приборами или специальными приборами, которые будет использовать только робот.
Эндрю Купер и его коллеги описывают модифицированного робота, который использует те же стандартные аналитические инструменты, что и химик-человек, автоматизируя исследователя, а не инструменты. Робот использует комбинацию лазерного сканирования в сочетании с сенсорной обратной связью для позиционирования, а не систему видения. Следовательно, он может работать в полной темноте, что является преимуществом для проведения светочувствительных фотохимических реакций. Робот имеет человеческие размеры и может работать в обычной неизмененной лаборатории. В отличие от многих автоматизированных систем, которые могут дозировать только жидкости, этот робот дозирует как твердые вещества, так и жидкости с высокой точностью и повторяемостью, расширяя его полезность в исследованиях материалов.
Авторы запрограммировали робота для изучения различных гипотез, чтобы улучшить производительность полимерного фотокатализатора. Он оптимизировал условия реакции в течение двух-трех дней вместо нескольких месяцев, которые требуются человеку. Авторы предполагают, что этот робот может использоваться в обычных лабораториях для решения ряда исследовательских задач, помимо фотокатализа.
Читайте также: