
Робот из ноутбука своими руками
Добавил пользователь Morpheus Обновлено: 05.10.2024
Как сделать робота своими руками? Можно разработать в гараже-подвале или на чердаке. Подробные фото и видео инструкции для того, чтобы создать самодельных роботов. В этом разделе Вы найдёте инструкции для конструирования устройств своими руками, а это занятие для настоящего робототехника!

Защитники прав роботов не дремлют
Всего через полвека роботы могут получить права, которыми сегодня обладает только человек. Такой вывод содержится в докладе, подготовленном сэром Дэвидом Кингом, главным .

Уже через пару лет можно будет напечатать на 3D принтере и запрограммировать робота
Футуролог компании Intel посетил недавно мероприятие Maker Faire в Нью-Йорке. Он прибыл туда, чтобы показать Jimmy — небольшого антропоморфного робота, создаваемого в рам.
Рубрика: Роботы своими руками - сделай сам - 3 [43]

Простой робот на микроконтроллере
Обычно, в статьях, я стараюсь излагать материал в порядке его разработки, но думаю, что это не тот случай. Поэтому, пропустим этапы проектирования принципиальной электрической.

Персональный реактор Железного человека
В статье описывается как самому из подручных средств собрать копию реактора железного человека. Сделайте и Вы реактор Тони Старка! Покажите на что.

Трансформер ростом в 7 метров из старого автомобиля
Один из жителей Америки сконструировал из старого автомобиля семиметрового робота-трансформера по типу тех, что были показаны в одноимённом фильме. Смогут ли жители России.

Тыква - робот
Сделай сам тыква-робота из тыквы, кучки светодиодов, ножика и фантазии! Можно по такой же схеме сделать робота из яблока, дыни или арбуза.

Сделай сам механическую руку, которая пишет время на доске
Этот робот оупенсорсный, так что его цифровые 3D-исходники и инструкции по сборке можно бесплатно скачать исходники робота на сервисе.
![]()
Проект Робот-паук

Вибро робот своими руками
Порой идеи создания автоматизированной машины приходят совсем неожиданно. Если поразмышлять на тему, как заставить робота из подручных средств двигаться, возникает мысль о.

Виброробот с фоторезисторами
Виброробот передвигается за счёт направленных вибрационных волн от быстро колеблющегося вибрационного двигателя (из пейдера или сотового телефона). Виброробот пассивно ожидает.
![]()
Самодельная мобильная робототехническая платформа

Робот своими руками как в рекламе
Думаю многие видели рекламу одного из известных браузеров, в которой простенький робот крутясь рисовал цветными фломастерами неразборчивые фигуры. Предлагаю вам попробовать.

Робот из пачек сигарет
Если у Вас есть пустые пачки из под сигарет и Вы не знаете куда бы их деть. Подождите, не выбрасывайте их. А сделайте из них что-нибудь необычное! Вот пример что можно сделать из.

Самодельный робот-магнит в виде гигантской божьей коровки
Очень многие любят украшать свои холодильники всяческими магнитами, разнообразие видов и форм которых иной раз просто поражает. Но создателю этого мега-магнита этого показалось.
![]()
Статьи и информация про роботов Проекты на платформе Ардуино
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Ритм жизни современного человека становится все более насыщенным и в его плотном графике становится все меньше времени на уборку собственного дома. В связи с этим в последнее время появляется все больше устройств, упрощающих наведение порядка в доме, одними из которых являются роботы-пылесосы, позволяющие в автоматическом режиме производить уборку пола в помещениях. У этих роботов-пылесосов достаточно много достоинств, но их существенным недостатком, сдерживающим их широкое распространение, является цена. Поэтому в данной статье мы рассмотрим создание робот-пылесоса на основе платы Arduino, который по функциональности будет мало отличаться от коммерческих моделей роботов-пылесосов, но стоить будет существенно дешевле них.

В составе робота мы будем использовать ультразвуковые датчики и инфракрасный датчик (IR proximity sensor). Ультразвуковые датчики будут помогать роботу избегать столкновения с препятствиями во время уборки помещения, а датчик приближения будет предотвращать падение робота с лестниц.
Ранее на нашем сайте мы уже рассматривали проект чистящего робота пылесоса на основе Arduino, но он был недостаточно совершенным и очень громоздким. Рассматриваемый в данном проекте робот-пылесос значительно более компактный и отличается более интеллектуальным алгоритмом работы. Также на нашем сайте вы поможете посмотреть похожие проекты роботов на основе платы Arduino:
Необходимые компоненты
- Плата Arduino Pro Mini (купить на AliExpress).
- Ультразвуковой датчик HC-SR04 – 3 шт. (купить на AliExpress).
- Драйвер двигателей L293d (купить на AliExpress).
- Электродвигатели постоянного тока формата N20, работающие от 5 В, с кронштейнами для их установки – 2 шт. (купить на AliExpress - смог найти только на 6 В, на 5 В почему то не удалось найти).
- Переключатель.
- Регулятор напряжения LM7805 (купить на AliExpress).
- Литий-ионная батарея 7.4V (купить на AliExpress).
- Инфракрасный датчик (купить на AliExpress).
- Перфорированная плата.
- Опорный ролик (колесо) для робота.
- MDF (из него будет делаться корпус робота).
- Портативный вакуумный пылесос (Vacuum Cleaner).
Внешний вид компонентов, необходимых для сборки данного робота-пылесоса, показан на следующем рисунке:

Портативный пылесос (Portable Vacuum Cleaner)
Для того, чтобы наш робот мог выполнять свою функцию по предназначению (то есть пылесосить помещение), в его составе должен быть портативный пылесос. Внешний вид подобного пылесоса показан на рисунке ниже. Этот пылесос имеет очень простой механизм. Он имеет три части внизу – небольшую камеру для сбора пыли, двигатель постоянного тока и вентилятор. Сверху пылесоса имеется контакт для подключения питания. Двигатель непосредственно запитывается от напряжения 3V (2 батарейки по 1,5 В формата AA) через простой выключатель. Поскольку мы будем запитывать все наше устройство от литий-ионной батареи 7.4V, мы можем отрезать провода пылесоса от его внутреннего источника питания и запитать его от напряжения 5V с нашей схемы. Таким образом, мы удалили все ненужные нам внутренности пылесоса и он стал выглядеть внутри так, как показано на следующем рисунке.

Ультразвуковой датчик HC-SR04

Для обнаружения роботом препятствий в нашем проекте мы будем использовать популярные ультразвуковые датчики HC-SR04. Принцип их работы достаточно прост: передающий модуль датчика излучает ультразвуковую волну, которая распространяется в окружающем пространстве, отражается от препятствия и улавливается (принимается) приемным модулем датчика, в результате чего на выходе датчика формируется импульс, равный времени распространения ультразвуковой волны до препятствия и обратно. Зная скорость распространения звука в воздухе, достаточно просто на основе этого времени определить расстояние до препятствия. Более подробно об определении расстояний с помощью данного ультразвукового датчика и платы Arduino можно прочитать в этой статье. Также на нашем сайте вы можете посмотреть все проекты, в которых для определения расстояния использовался ультразвуковой датчик HC-SR04.
Инфракрасный датчик для обнаружения лестниц
Для того, чтобы наш робот-пылесос мог обнаруживать лестницы и не падать с них, мы будем использовать инфракрасный датчик (IR Sensor). Принцип его действия достаточно прост – он содержит в своем составе излучающий инфракрасный диод (IR LED) и фотодиод. Излучающий инфракрасный диод излучает инфракрасный свет и если на его пути встречается препятствие, то он отражается от него и улавливается (принимается) фотодиодом. Но напряжение на выходе фотодиода достаточно мало, поэтому для его усиления до необходимого уровня в составе датчика содержится компаратор на основе операционного усилителя.

Инфракрасный датчик содержит 3 контакта – Vcc (питающее напряжение), ground (общий провод, земля) и output (выход). Когда вблизи датчика есть препятствие, то на его выходе формируется напряжение низкого уровня (low). Поэтому данный датчик мы можем использовать для обнаружения пола комнаты. Если он передвигается по полу, то на выходе датчика будет low. Если же на выходе датчика мы неожиданно обнаружим напряжение высокого уровня, то мы должны либо остановить робота, либо двигать его в обратном направлении, либо сделать что-либо другое чтобы предотвратить его падение с лестницы.
Схема проекта
Схема робота-пылесоса на основе платы Arduino представлена на следующем рисунке.

Для обнаружения препятствий мы в схеме робота используем три ультразвуковых датчика. Их контакты питания подключены к общему питанию схемы, а земля – к общему проводу схемы. Управляющие (trigger) и выходные контакты (echo pins) датчиков подключены к ШИМ (широтно-импульсная модуляция) платы Arduino. Инфракрасный датчик также запитывается от общих VCC и земли (ground) схемы, а его выходной контакт подключен к цифровому контакту D2 платы Arduino. У драйвера двигателя мы два его контакта, разрешающих его работу (enable pins), подключили к 5 В, также контакт подачи питающего напряжения мы подключили к 5 В поскольку мы используем электродвигатели, работающие от напряжения 5 В. Поскольку наш робот-пылесос запитывается от литий-ионной батареи напряжением 7.4 В, а все компоненты схемы питаются от напряжения 5 В, то для преобразования напряжения 7.4 В в напряжение 5 В мы используем регулятор напряжения LM7805.
Сборка конструкции робота
Для спайки компонентов между собой мы использовали перфорированную плату. Эта часть работы очень проста, но к ней все равно необходимо отнестись с тщательностью. Для подключения платы Arduino pro mini мы использовали два контакта типа "мама" (female headers). После того как мы закончили пайку на перфорированной плате мы использовали соединительные провода для подключения ультразвуковых датчиков.
Изготовление корпуса для робота-пылесоса
Мы решили сделать наш робот-пылесос круглой формы как и большинство современных коммерческих моделей роботов-пылесосов. В качестве материала для изготовления корпуса робота мы решили использовать MDF поскольку он достаточно прочный и имеет неплохую влагозащищенность. Разумеется, вы можете выбрать другой материал, какой вам больше по душе.
Для изготовления корпуса робота мы вырезали из MDF круг радиусом 8 см, а в нем отверстие радиусом 4 см – в него будет вставляться наш портативный пылесос. Также мы вырезали соответствующие отверстия под колеса и три небольшие отверстия для установки опорного валика (колеса). Далее мы установили двигатели с помощью кронштейнов, колеса и опорное колесо. Затем мы установили ультразвуковые датчики слева, справа и спереди робота. Также мы закрепили инфракрасный датчик снизу робота. И не забудьте установить в корпус робота выключатель питания. На следующем рисунке вы можете визуально посмотреть описанную последовательность шагов по сборке корпуса робота.

Для изготовления верхней части робота мы вырезали круг радиусом 11 см. Для скрепления верхней и нижней частей робота и обеспечения необходимого промежутка между ними мы использовали три пластиковых трубы длиной 4 см. Всю конструкцию мы скрепили с помощью клея. При желании боковые стенки робота вы можете изготовить из пластика или какого-нибудь другого материала.

Объяснение программы для Arduino
Полный код программы приведен в конце статьи, здесь же мы кратко рассмотрим его основные фрагменты.
В коде программы мы не будем использовать никаких внешних библиотек, поскольку взаимодействие с датчиком HC-SR04 осуществляется достаточно просто. Первым делом в программе мы объявим переменные для взаимодействия контактами Echo и Trigger ультразвуковых датчиков. Первый датчик у нас стоит слева робота, второй – спереди, а третий – справа робота.

Все началось с того момента когда я стал интерисоваться модификациями заводских компьютерных корпусов в году этак 2009 уже точно и не вспомню. Читал я в то время журнал ДПК где раз в год проводился моддинг конкурс, в котором я хотел принять участие но этого так и не случилось увы. В 2013 спроектировал свой первый кастомный корпус для пк из акрила со встроенным экраном. Намного позже появилась идея минимизировать рабочий корпус но в тоже время использовать стандартные комплектующие так сказать из магазина через дорогу, не прибегая к заказам из поднебесной в итоге его можно укомплектовать: atx блок питания, mini-ITX материнка, 1шт - 3.5 жесткий диск, 4 - 2.5 накопителя, 3 - корпусных вентилятора 120мм, максимальная длина видеокарты - 280мм. Позже в 2015г. изучая зарубежные и отечественные моддинг форумы и недовольство качеством(и толщиной пластика да и вообще..) и характеристиками выпускаемых ноутбуков среднего и нижнего ценового сегмента, а также на фоне взлетевшего курса доллара, закралась мне в голову идея - собрать ноутбук с нуля под свои нужды, и самая главная фишка его должна была стать производительность т.к. планировалось что он должен быть собран из десктопных(кторые можно встретить в рядовых пк) коплектующих)).
Выбор комплектующих и другие приключения
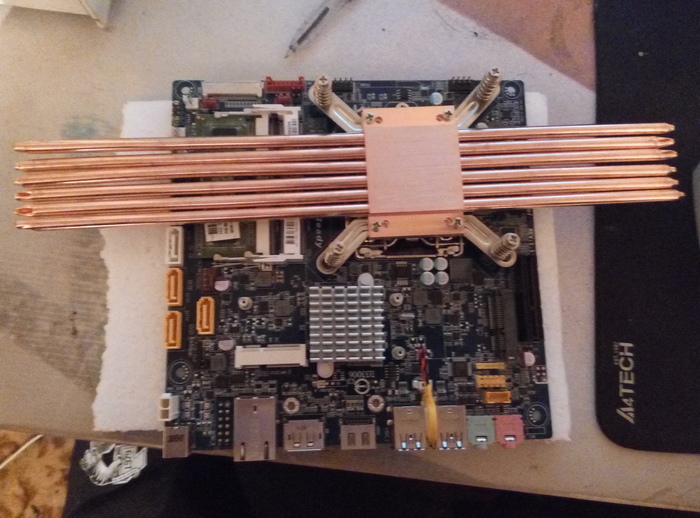
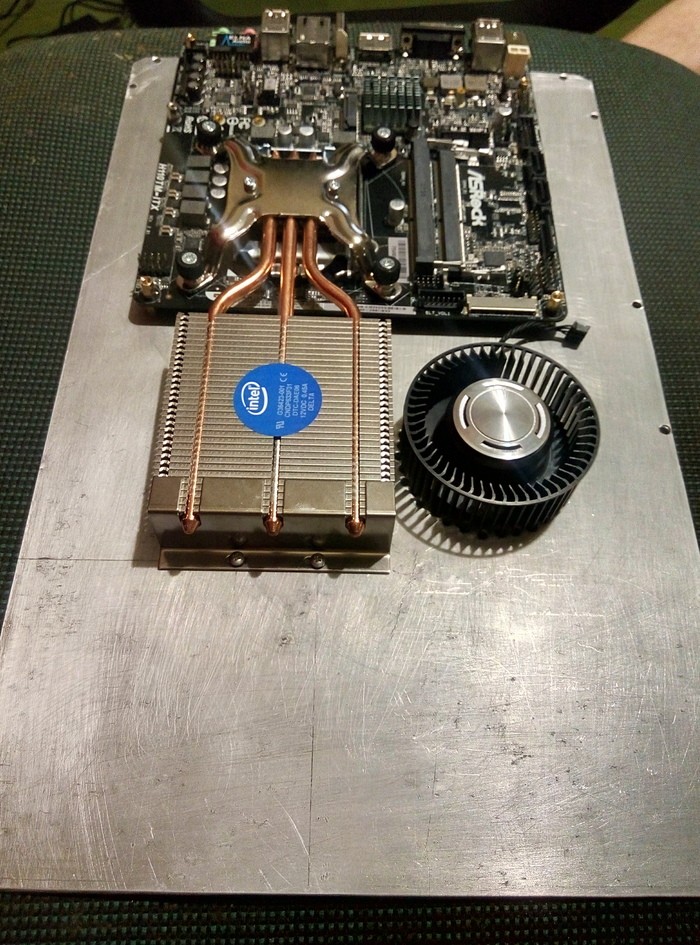
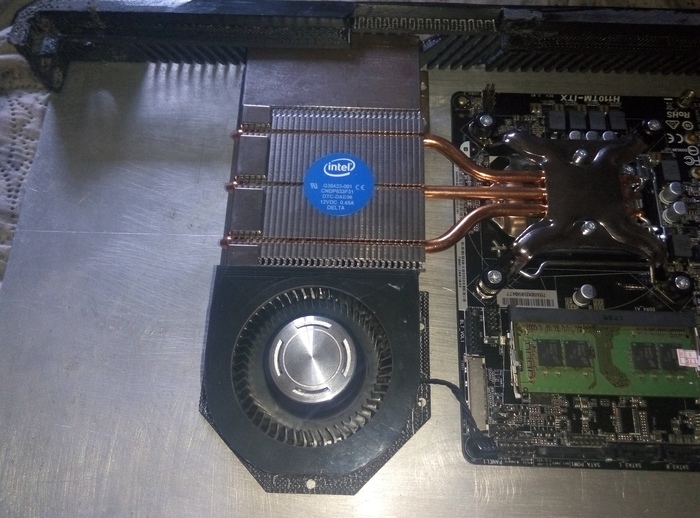
Ну что, задача поставлена просто и понятно - спроектировать корпус для ноутбука под десктопное железо, для этого нужно сначала определится с самим железом и заказать его, чтоб начать расчеты и разработку корпуса. Сказано сделано: была приобретена мат. плата thin mini-itx 1155 сокет(точную модель на вскидку не вспомню), процессор i3-2100 и другое по мелочи. Также изначально планировалось его сделать если не полностью пассивным то на 60% это точно - добиться я этого хотел с помощью алюминиевого корпуса радиатора и такого вот куллера из поднебесной:
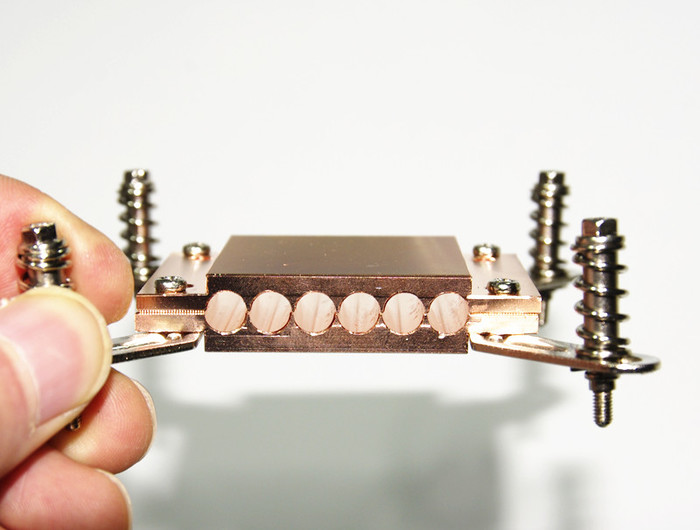
В который вставляются 6 теплотрубок диаметром 6мм.
Высборе это выглядело так:
Так же была заказана беспроводная клавиатура толщиной 4мм. Но дальше начали появляться трудности подключения ноутбучной матрицы к материнской плате через lvds разъем т.к. шнурок lvds 40pin в комплекте к материнской не входил а беглый обзор схожих ноутбучных шлейфов с такми же разъемом привел меня к выводу что на них совсем другая распиновка и их применить в моем проекте не удастся, благо что распиновка разъема приведена в инструкции к мп. Поиск шлейфа так и не увенчался успехом - проект был заморожен на неопределенное время.
Намного позже в 2017г. бороздя рынки поднебесной была обнаружена интересная мп с штырьевым разъемом lvds на 1151 сокете, недолго думая она и другие комплектующие были заказаны на сумму ок. 15к руб. и безвозвратно утеряны в процесс транспортировки(но это уже совсем другая история).
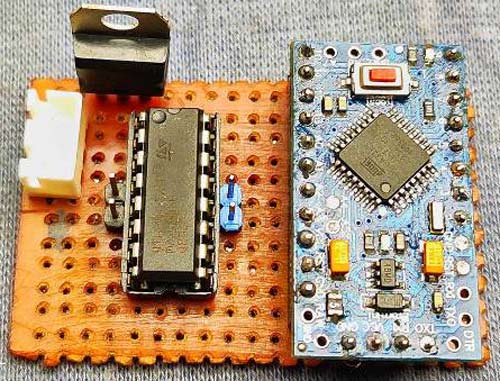
В итоге были выбраны и приобретены следующие основные комплектующие(с целью сделать замеры для проектировки корпуса и хотя бы просто запустить - проверить жизнеспособность всего этого):
Материнская плата - AsRock H110TM-ITX R2.0
Процессор - Intel Pentium G4400
Охлаждение - Intel BXHTS1155LP
Далее по получении всех основных комплектующих последовали их замеры , переосмысление дизайна корпуса и проектирование последнего.
Переосмысление дизайна корпуса и проектирование.
Изначально корпус ноутбука виделся у меня в голове в форме классического ноутбука: верхняя крышка с матрицей и основная часть с железом. Вот первые пробы пера:




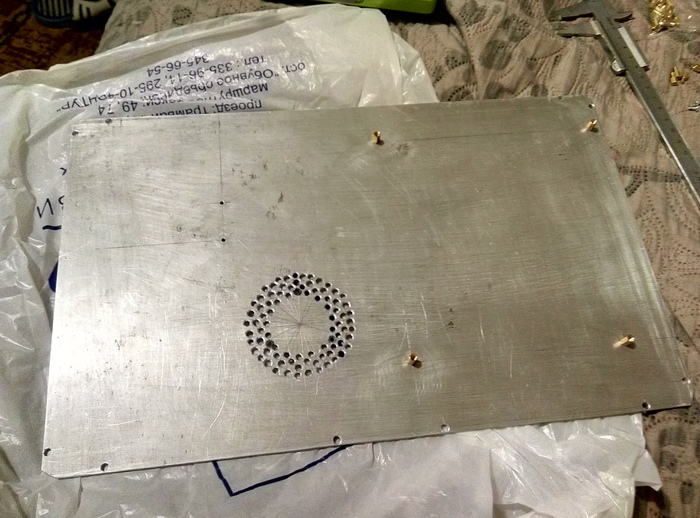
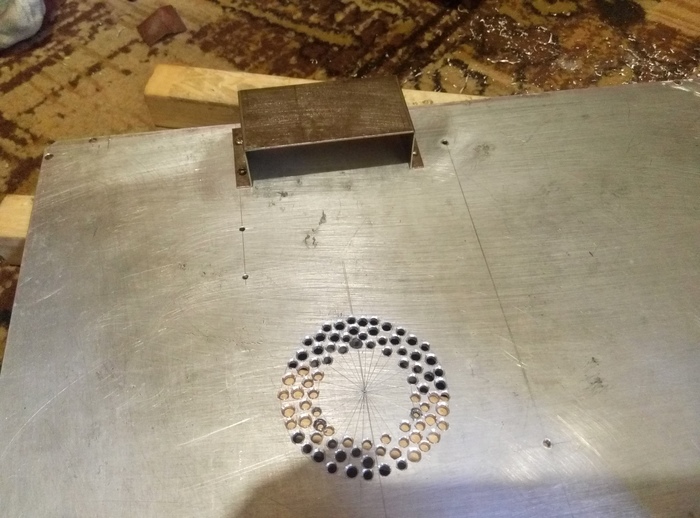
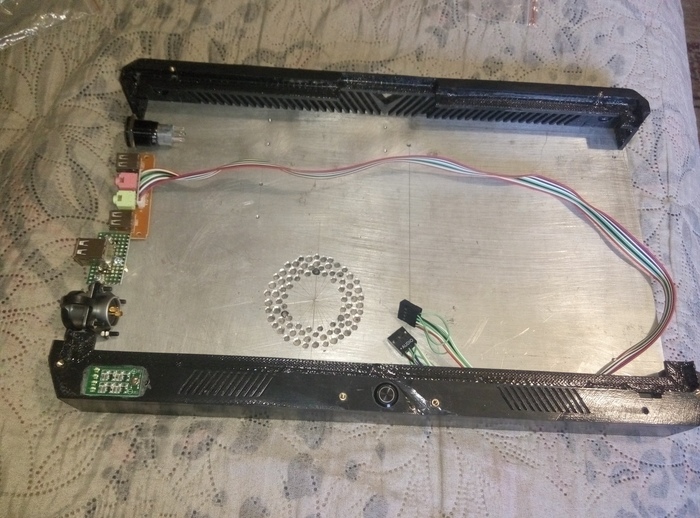
Дальше этих моделей я не стал заходить и начал думать в сторону упрощения конструкции и подвижных деталей(вроде петель) так и родилась идея сделать корпус в виде планшета. Дальше были наброски в тетрадных листах и долгие часы проектирования в компасе 3д моделей. Концепция финального корпуса: две пластиковые части верхняя и нижняя крепятся к нижнему листу алюминия, сверху и по бокам корпуса стальные листы).
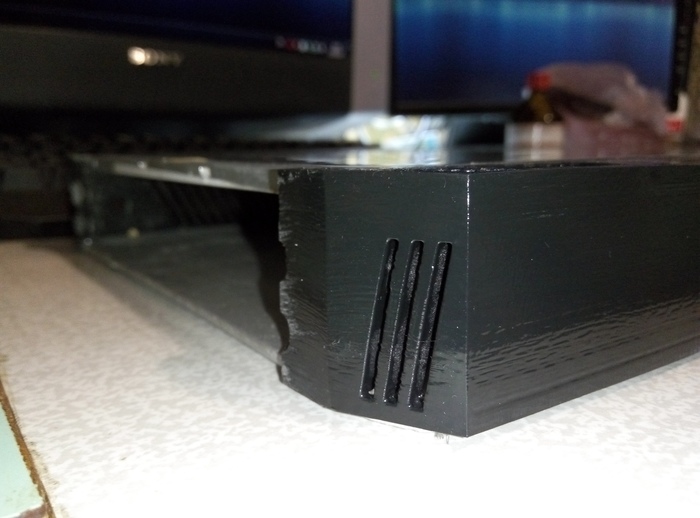
Вот что вышло в итоге:



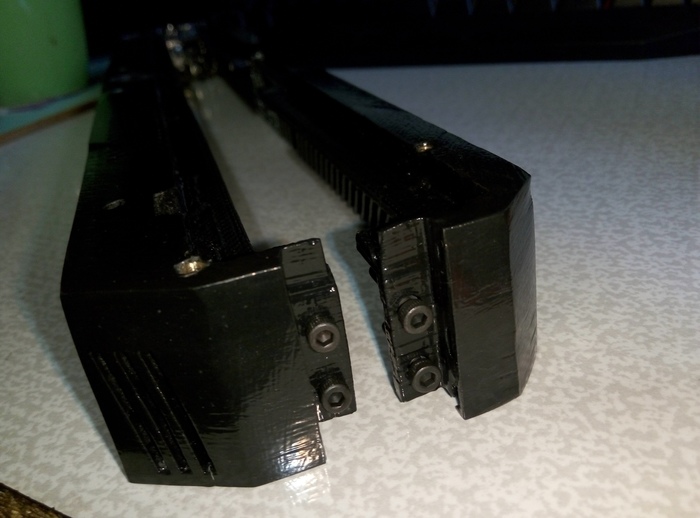
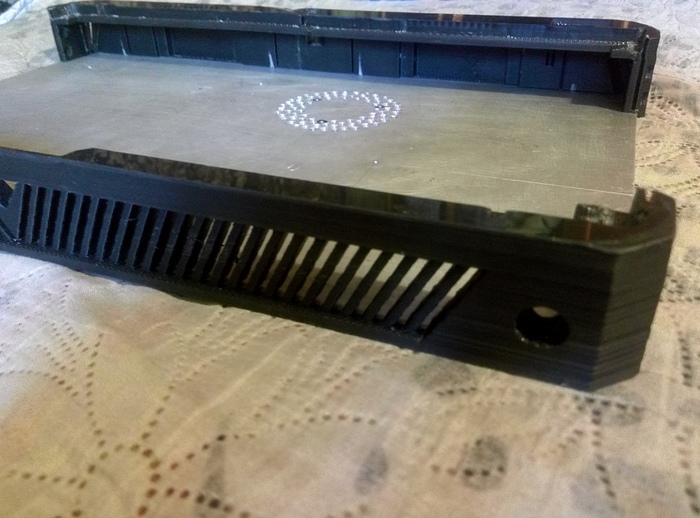
Далее мне предстоял выбор каким образом изготовить корпус: откинув прочие варианты осталось 2: фрезеровка или 3д печать.(это позже я нашел более эффективный и более дешевый способ) остановился на 3д печати поскольку фрезеровщики попросту отказывались за это браться. Напечатаны эти две части были из абс пластика на заказ но так как я модель рисовал "в притык" я еще не знал об так называемой усадке при печати, то мне пришлось долго и нудно допиливать все напильником.
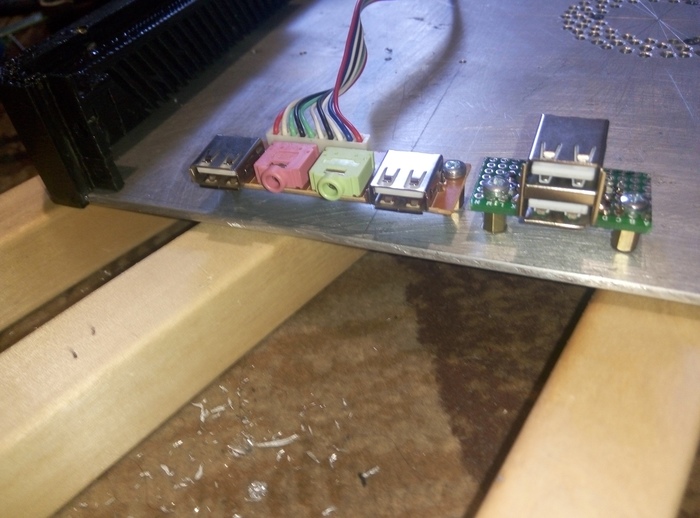
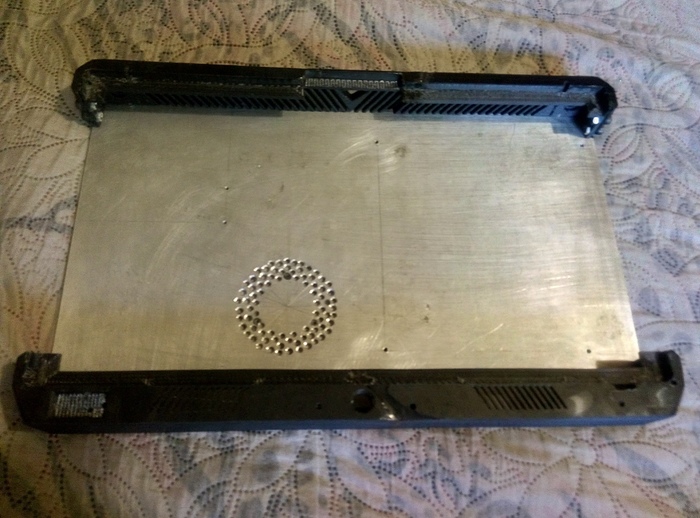
Далее фото процесса сборки примерок и допиливания:





На этом как я понял лимит фотографий в посте подошел к концу, поэтому продолжение ожидайте в следующем посте.
Читайте также: