
Радиоуправление своими руками на 12 команд
Добавил пользователь Евгений Кузнецов Обновлено: 18.09.2024
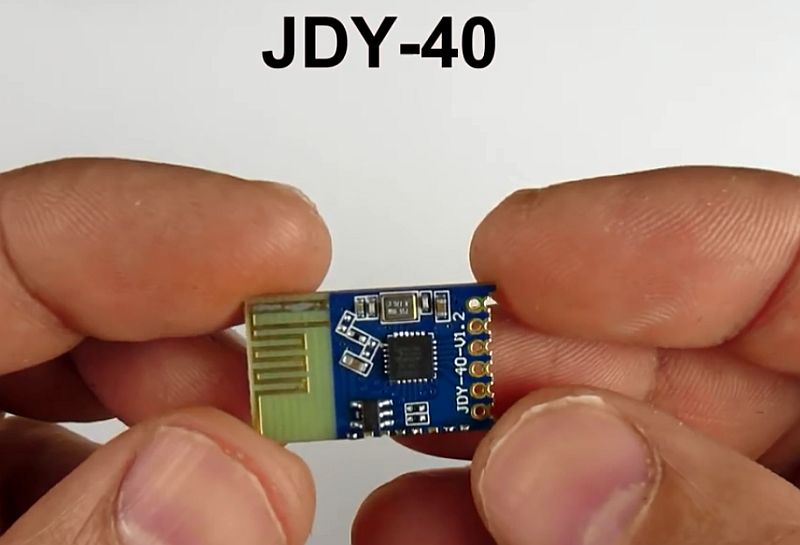
Благодаря очень дешёвому китайскому радиомодулю JDY-40 c Алиэкспресс который работает на частоте 2,4 ГГц сейчас можно сделать радиоуправление для различных поделок и при этом можно даже обойтись без микроконтроллера. Электронный модуль JDY-40 позиционируется для работы совместно с Arduino или микроконтроллерами но он может работать и без них, как автономное устройство, причём один модуль можно установить в роли передатчика, а второй как приёмник делая таким образом из них радиоуправление до 8 независимых каналов но в связке с Ардуино или микроконтроллером у него конечно становится больше возможностей но в данной статье мы обойдёмся без них.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Модуль JDY-40 очень компактный и можно его запитать от любого литий-ионного аккумулятора на 3,7 В, что позволяет встроить его в любые модели. Радиус действия радиомодуля до 120 метров в прямой видимости, что для большинства устройств вполне достаточно, если нужна большая дальность то можно подпаять наружную антенну, например от Wi-Fi роутера.
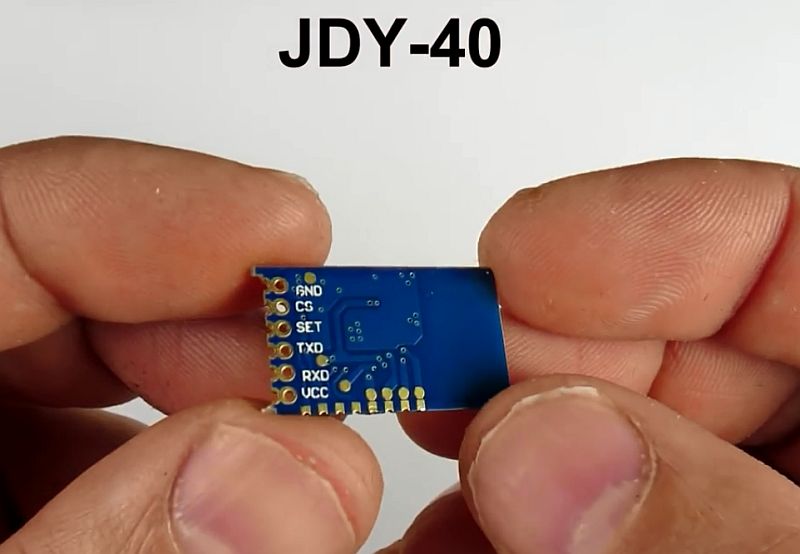
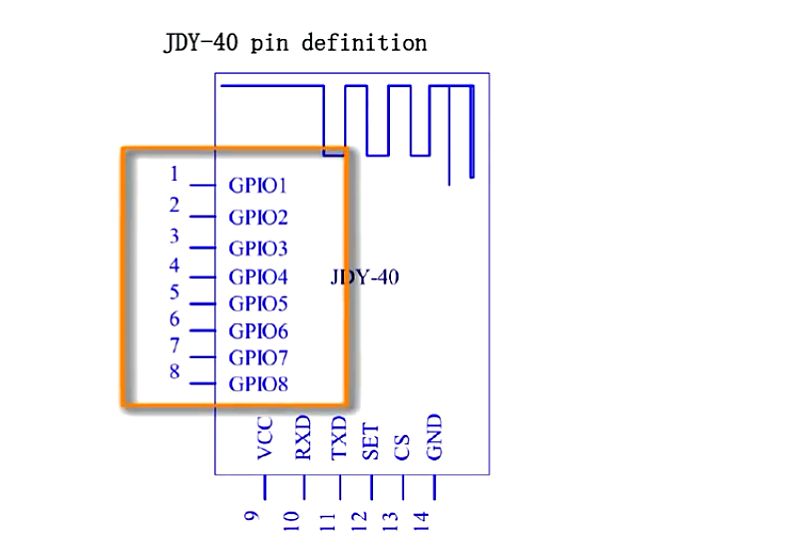
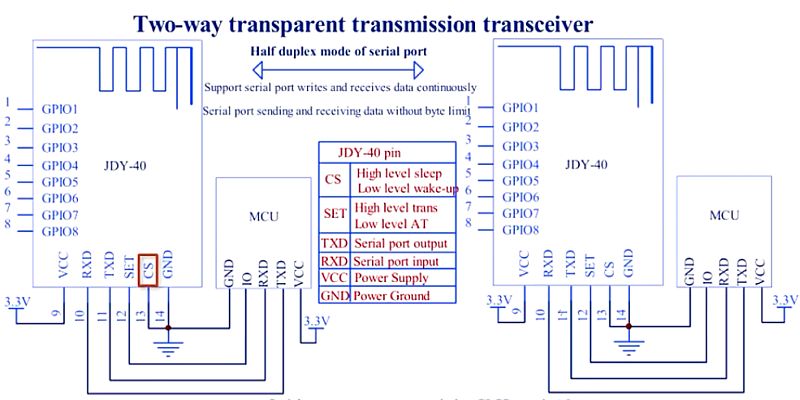
Для обмена данными с микроконтоллером или Ардуино у модуля JDY-40 осуществляется по USART интерфейсу с максимальной скоростью 19200 бит. Для подключения периферии к модулю доступно 8 портов ввода-вывода. Этот порт модуля можно использовать на прямую в качестве пульта на 8 команд.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
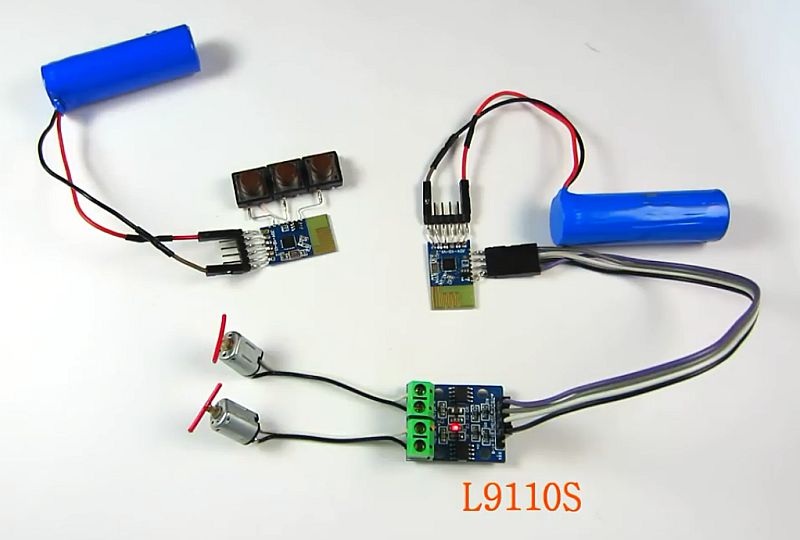
Ниже приводу простейшую схему подключения модуля JDY-40 совместно с Н-мостом для двигателей в роли модуля L9110S и управления или 2-мя кнопками по радиоканалу.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Надо помнить при подключении вывода CS радио модуля на плюс, то есть положительного потенциала он уходит в спящий режим, если негативный (минус питания) то модуль выходит из спящего режима. Если модуль используется в роли джойстика то этот вывод не используется.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
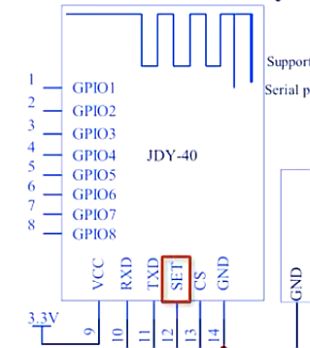
Также радио модуль JDY-40 прежде чем использовать в качестве ДУ следует настроить подключив каждый их них по очереди к компьютеру и настроив передавая AT команды по USART интерфейсу. Чтобы модуль принимал AT команды на вход SET модуля надо подать низкий уровень, в противном случае эти команды воспринимаются просто как данные и никак не выполняются. Перечень всех AT команд приведён в даташите к модулю.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
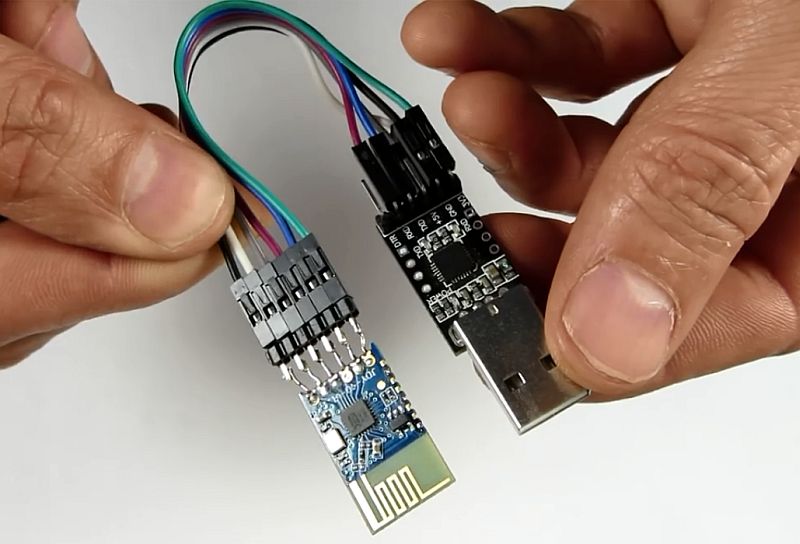
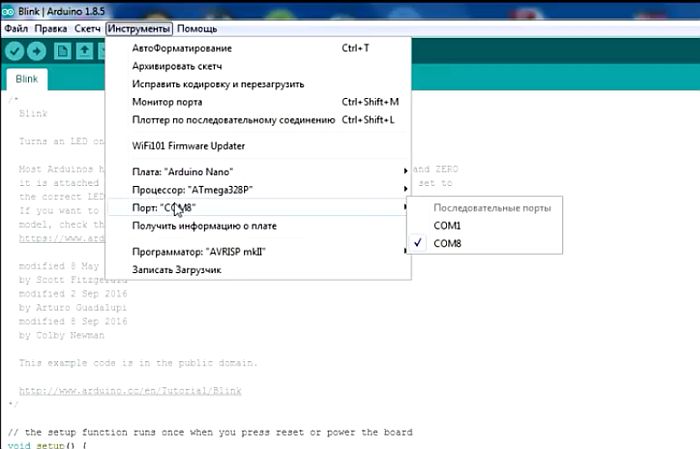
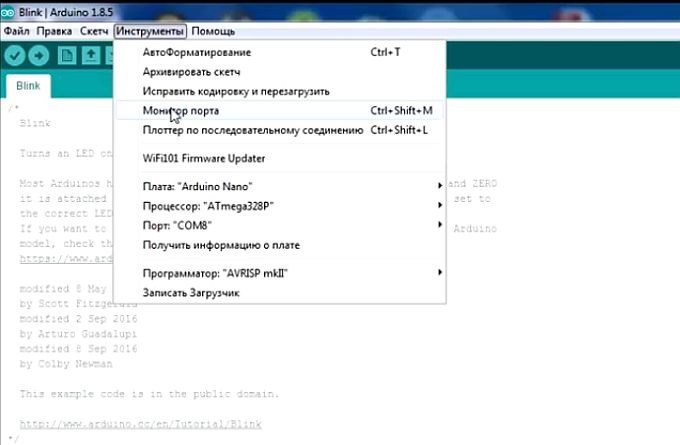
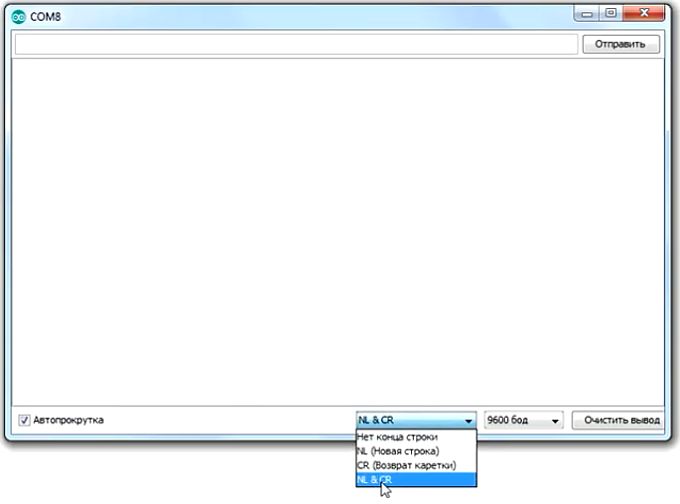
Подключить модуль к компьютеру можно через USB–UART TTL RS232 конвертер и воспользоваться любой терминальной программой на компьютере. Например в программной среде Arduino имеется встроенный терминал им и воспользуюсь. Для этого сначала выберем виртуальный COM порт к которому у Вас будет определено подключение модуля.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
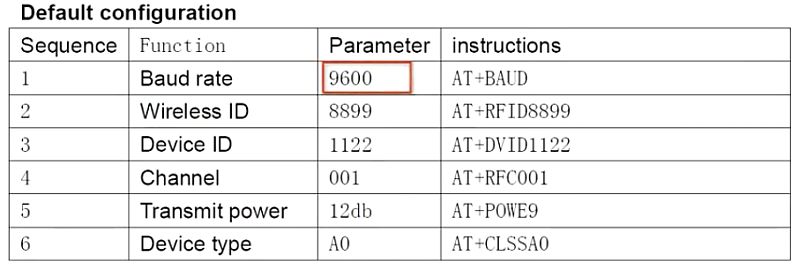
Изначально модуль поставляется с заводскими настройками, они приведены в этой таблице:
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
В ней как мы видим скорость передачи данными по умолчанию выставлено 9600 бод. Также здесь приводятся ID модуля и сети, канал приёма и передачи данных, здесь может быть максимальное значение – 127. Далее идёт выбор мощности передатчика, здесь можно понизить её, если нужно уменьшить влияние от других модулей которые работают неподалёку допустим если каждый модуль трудится в каждой из комнат квартиры на одном канале и можно с помощью одного пульта управлять разными модулями по всех квартире переходя из комнаты в комнату.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
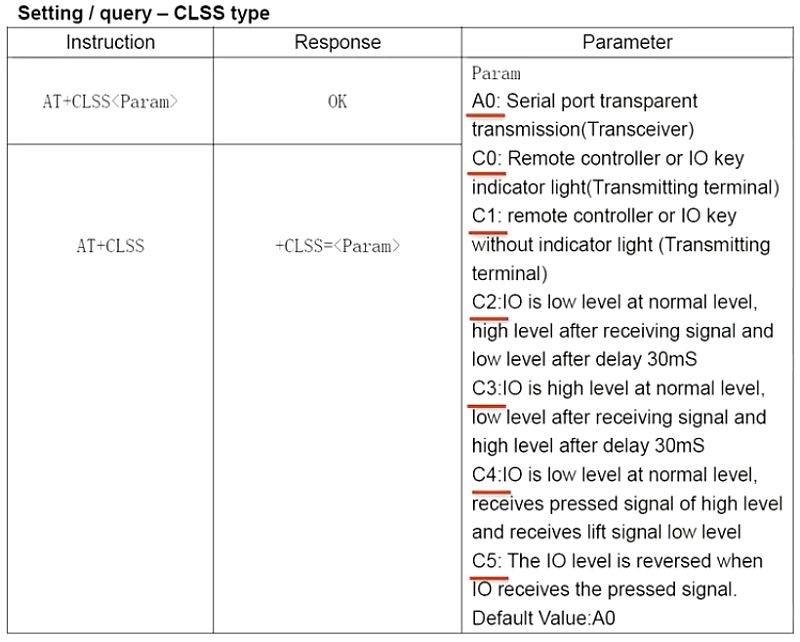
— Режим А0 переводит модуль в последовательный режим работы, этот пункт относится для обмена данных с микроконтроллером.
Остальные режимы относятся к работы модуля в качестве пульта управления:
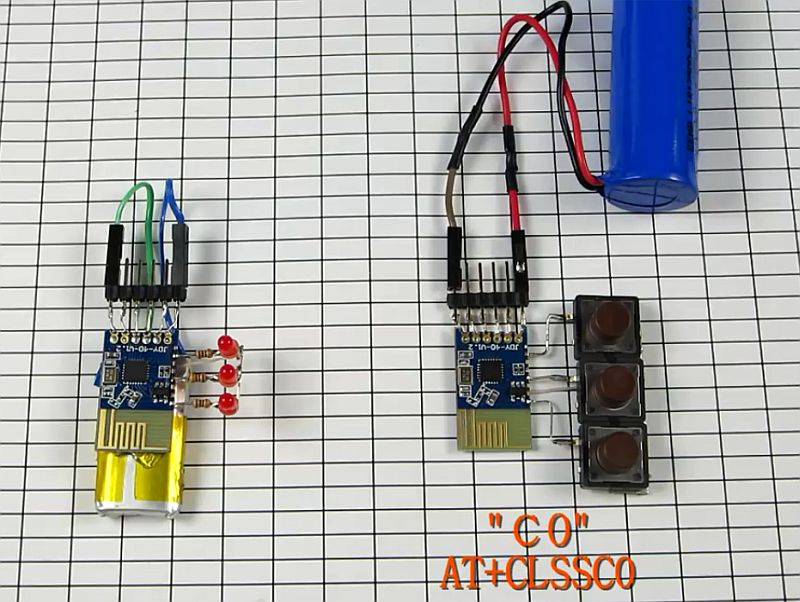
— В режиме С0 модуль переходит в режим пульта управления, он выступает как передатчик, при этом режиме порт модуля ввода-вывода переводится только на ввод, в таком режиме на все 8 портов можно навесить кнопки. В данной схеме в качестве демонстрации я подключил 3 кнопки.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
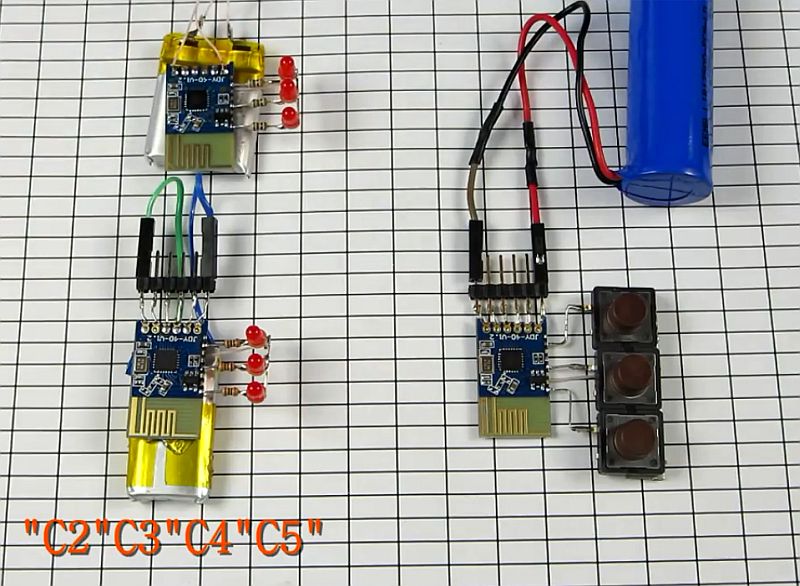
Другой модуль нужно перевести в режим исполняющего устройства, то есть в роли приёмника, это могут быть режимы: С2, С3, С4, С5. Они отличаются друг от друга по типу срабатывания. Причём приёмный модуль здесь может быть не один, а сразу несколько и все они будут выполнять команды одновременно. Выводы портов при этом у передатчика и приёмников должны совпадать. Итак, разберёмся что же означают данные режимы С2, С3, С4, С5.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
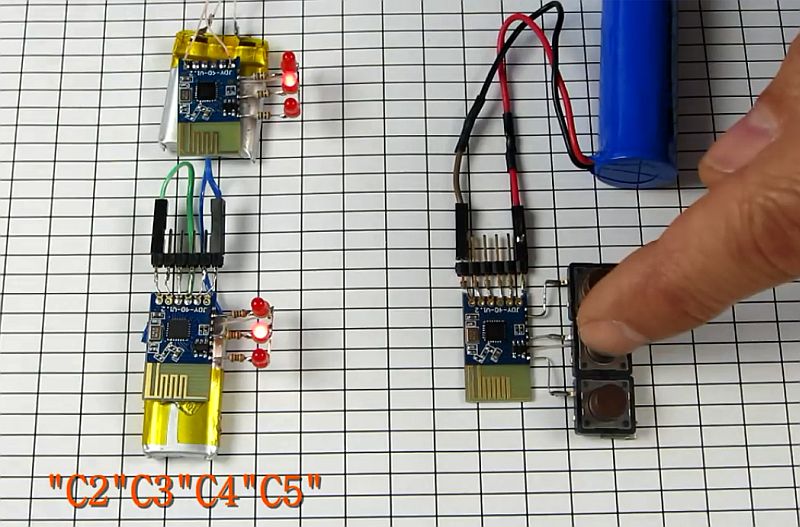
В режиме С2 при нажатии на пульте кнопки на порте приёмника, что соответствует такому же порту на передатчике с нажатой кнопкой формируется кратковременный импульс и светодиод вспыхивает и тут же гаснет, не смотря на то что кнопка ещё не отпущена.
Режим С3 точно такой же по логике как и С2 с отличием лишь в том, что на выводах порта изначально присутствует положительный потенциал и все светодиоды светятся изначально, при нажатии кнопки светодиод на таком же порту гаснет на несколько миллисекунд и снова засвечивается.
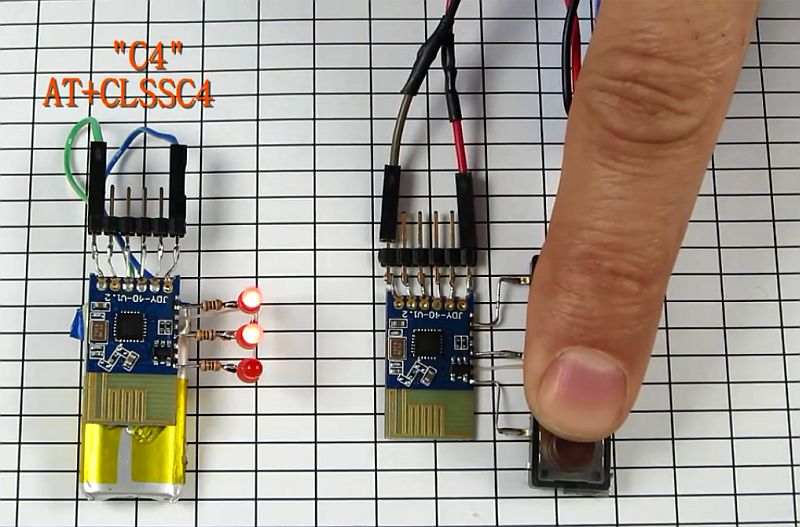
В режиме С4 при нажатии на кнопку передающего модуля на приёмном модуле на таком же порте появляется положительный потенциал и зажигается светодиод и он горит до тех пор, пока нажата кнопка, при отпускании светодиод гаснет.
Замечу, что каналы в любом из режимов независимы друг от друга и можно одновременно нажимать любое количество кнопок одновременно и все светодиоды этих портов тоже будут зажигаться.
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
В режиме С5 все выхода приёмника переходят в качестве триггеров, то есть, при нажатии кнопки на передатчике, в приёмнике на этом выходе появится положительный потенциал и он будет в таком состоянии даже при отжатии кнопки, чтобы выход приёмника перешёл опять в отрицательный потенциал и светодиод погас то нужно снова нажать на ту же кнопку.
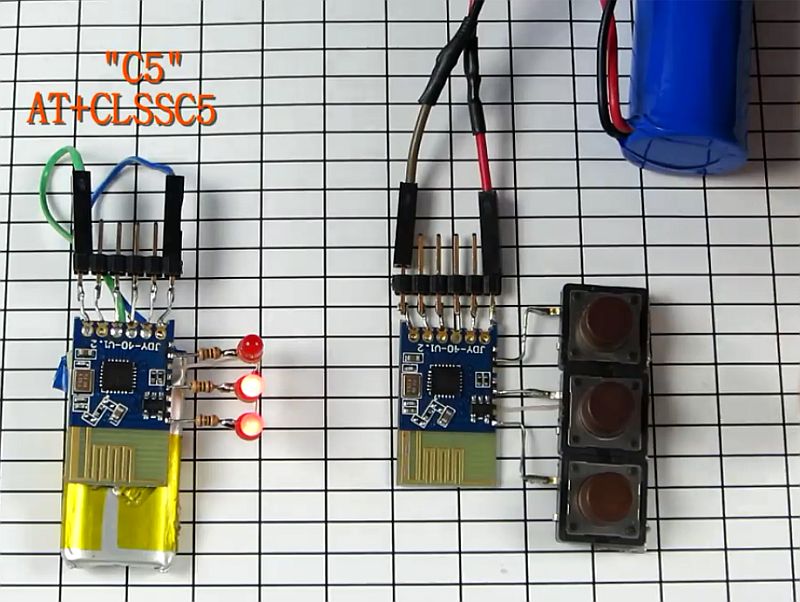
Делаем радиоуправление на радиомодуле JDY-40 без микроконтроллера
Вот мы и познакомились с радиомодулем JDY-40 и его возможностях в качестве простого ДУ для управления моделями по радиоканалу. Всё достаточно просто и имея эти крохотные модули можно оживлять любые игрушки и любых размеров добавляя им радиоуправление.

Кто из начинающих радиолюбителей не хотел сделать какое-нибудь устройство с управлением по радиоканалу? Наверняка многие.
Давайте рассмотрим, как на базе готового радиомодуля собрать несложное радиоуправляемое реле.
В качестве приёмо-передатчика я использовал готовый модуль. Купил его на AliExpress вот у этого продавца.
Комплект состоит из пульта–передатчика на 4 команды (брелок), а также платы приёмника. Плата приёмника выполнена в виде отдельной печатной платы и не имеет исполнительных цепей. Их необходимо собрать самому.
Вот внешний вид.

Брелок добротный, приятный на ощупь, поставляется с батарейкой 12V (23А).
В брелоке встроена плата, на которой собрана довольно примитивная схема пульта-передатчика на транзисторах и шифраторе SC2262 (полный аналог PT2262). Смутило то, что на микросхеме в качестве маркировки указано SC2264, хотя из даташита известно, что дешифратор для PT2262 – это PT2272. Тут же на корпусе микросхемы чуть ниже основной маркировки указано SCT2262. Вот и думай, что к чему . Что ж, для Китая это не удивительно.

Передатчик работает в режиме амплитудной модуляции (АМ) на частоте 315 МГц.
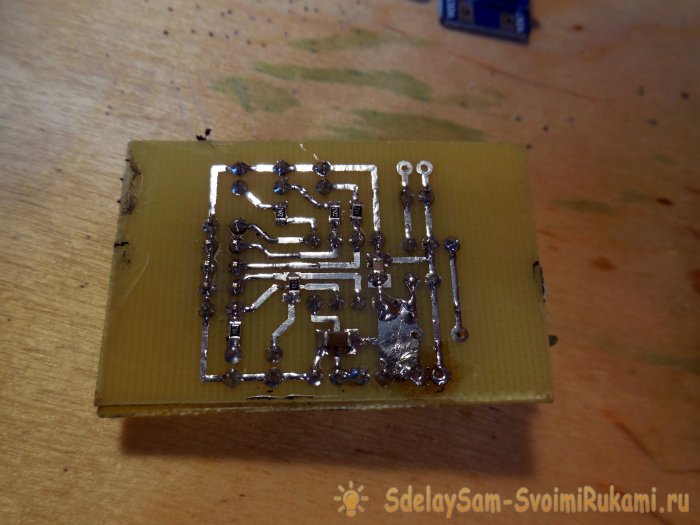
Приёмник собран на небольшой печатной плате. Радиоприёмный тракт выполнен на двух SMD-транзисторах с маркировкой R25 – биполярных N-P-N транзисторах 2SC3356. На операционном усилителе LM358 реализован компаратор, а к его выходу подключен дешифратор SC2272-M4 (она же PT2272-M4).

Как работает устройство?
Суть работы сего устройства такова. При нажатии на одну из кнопок пульта A, B, C, D передаётся сигнал. Приёмник усиливает сигнал, а на выходах D0, D1, D2, D3 платы приёмника появляется напряжение 5 вольт. Вся загвоздка в том, что 5 вольт на выходе будет только пока нажата соответствующая кнопка на брелоке. Стоит отпустить кнопку на пульте - напряжение на выходе приёмника пропадёт. Упс. В таком случае не получиться сделать радиоуправляемое реле, которое бы срабатывало при кратковременном нажатии кнопки на брелоке и отключалось при повторном.
Связано это с тем, что существуют разные модификации микросхемы PT2272 (китайский аналог – SC2272). А в такие модули почему то ставят именно PT2272-M4, у которых нет фиксации напряжения на выходе.
А какие же бывают разновидности микросхемы PT2272?
PT2272-M4 – 4 канала без фиксации. На выходе соответствующего канала +5V появляется только тогда, пока нажата кнопка на брелоке. Именно такая микросхема используется в купленном мной модуле.
PT2272-L4 – 4 зависимых канала с фиксацией. Если включается один выход, то другие отключаются. Не совсем удобно, если необходимо независимо управлять разными реле.
PT2272-T4 – 4 независимых канала с фиксацией. Самый лучший вариант для управления несколькими реле. Поскольку они независимы, то каждое может выполнять свою функцию независимо от работы других.
Что же сделать, чтобы реле срабатывало так, как нам нужно?
Тут есть несколько решений:
Выдираем микросхему SC2272-M4 и вместо неё ставим такую же, но с индексом T4 (SC2272-T4). Теперь выходы будут работать независимо и с фиксацией. То есть можно будет включить/выключить любое из 4 реле. Реле будут включаться при нажатии кнопки, и выключаться при повторном нажатии на соответствующую кнопку.
Дополняем схему триггером на К561ТМ2. Так как микросхема К561ТМ2 состоит из двух триггеров, то понадобиться 2 микросхемы. Тогда будет возможность управлять четырьмя реле.
Используем микроконтроллер. Требует навыков программирования.
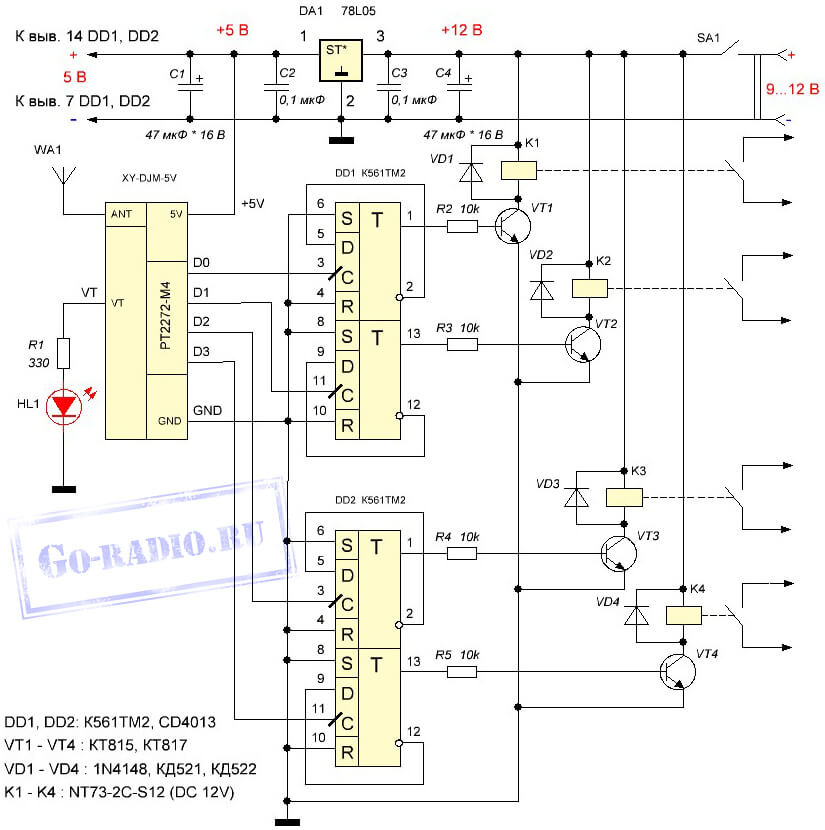
На радиорынке микросхему PT2272-T4 я не нашёл, а заказывать с Ali целую партию одинаковых микрух счёл нецелесообразным. Поэтому для сборки радиоуправляемого реле решил использовать второй вариант с триггером на К561ТМ2.
Схема достаточно проста (картинка кликабельна).
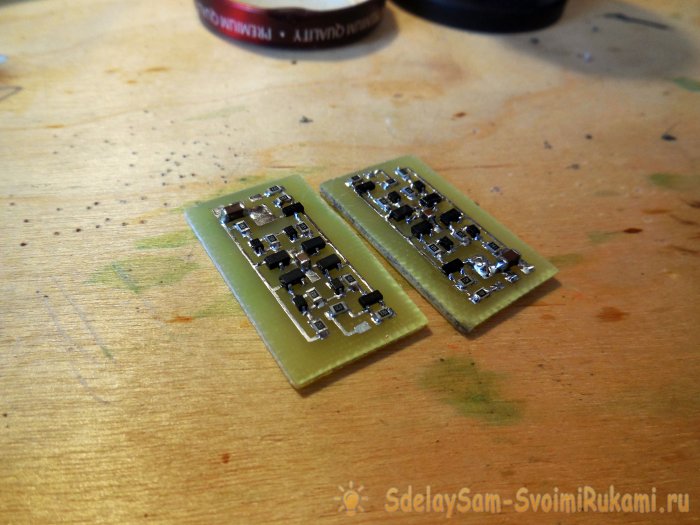
Вот реализация на макетной плате.


На макетке я быстренько собрал исполнительную цепь только для одного канала управления. Если взглянуть на схему, то можно увидеть, что они одинаковые. В качестве нагрузки на контакты реле нацепил красный светодиод через резистор в 1 кОм.
Наверняка заметили, что в макетку я воткнул готовый блок с реле. Его я вытащил из охранной сигнализации. Блок оказался очень удобным, так как на плате уже было распаяно само реле, штыревой разъём и защитный диод (это VD1–VD4 на схеме).
Пояснения к схеме.
Приёмный модуль.

Вывод VT – это вывод, на котором появляется напряжение 5 вольт, если был принят сигнал от передатчика. Я к нему подключил светодиод через сопротивление 300 Ом. Номинал резистора может быть от 270 до 560 Ом. Так указано в даташите на микросхему.
При нажатии на любую кнопку брелока светодиод, который мы подключили к выводу VT приёмника, будет кратковременно вспыхивать - это свидетельствует о приёме сигнала.
Выводы 5V и GND служат для подключения напряжения питания. Для питания схемы нам понадобится стабилизированный блок питания на 12 вольт. Ток потребления схемы небольшой, поэтому подойдёт любой блок. В качестве источника питания можно применить и блок питания, собранный своими руками.
Выводы D0, D1, D2, D3; – это выходы микросхемы дешифратора PT2272-M4. С них мы будем снимать принятый сигнал. На этих выходах появляется напряжение +5V, если был принят сигнал от пульта управления (брелока). Именно к этим выводам подключаются исполнительные цепи. Кнопки A, B, C, D на пульте (брелоке) соответствуют выходам D0, D1, D2, D3.
На схеме приёмный модуль и триггеры запитываются напряжением +5V от интегрального стабилизатора 78L05. Цоколёвка стабилизатора 78L05 показана на рисунке.

Буферная цепь на D-триггере.
На микросхеме К561ТМ2 собран делитель частоты на два. На вход С приходят импульсы с приёмника, и D-триггер переключается в другое состояние до тех пор, пока на вход С не придёт второй импульс с приёмника. Получается очень удобно. Поскольку реле управляется с выхода триггера, то и оно будет включено или выключено до тех пор, пока не придёт следующий импульс.
Вместо микросхемы К561ТМ2 можно использовать К176ТМ2, К564ТМ2, 1КТМ2 (в металле с позолотой) или импортные аналоги CD4013, HEF4013, HСF4013. Каждая из этих микросхем состоит из двух D-триггеров. Их цоколёвка одинаковая, но вот корпуса могут быть разные, как, например, у 1КТМ2.
Исполнительная цепь.
В качестве силового ключа используется биполярный транзистор VT1. Я использовал КТ817, но подойдёт КТ815. Он управляет электромагнитным реле K1 на 12V. К контактам электромагнитного реле K1.1 можно подключать любую нагрузку. Это может быть лампа накаливания, светодиодная лента, электродвигатель, электромагнит замка и др.
Цоколёвка транзистора КТ817, КТ815.
Следует учесть, что мощность подключаемой к контактам реле нагрузки должна быть не меньше той мощности, на которую рассчитаны контакты самого реле.
Диоды VD1–VD4 служат защитой транзисторов VT1–VT4 от напряжения самоиндукции. В момент отключения реле в его обмотке возникает напряжение, которое противоположено по знаку тому, которое поступало на обмотку реле от транзистора. В результате транзистор может выйти из строя. А диоды по отношению к напряжению самоиндукции оказываются открытыми и "гасят" его. Тем самым они берегут наши транзисторы. Не забывайте про них!
Если хотите дополнить исполнительную цепь индикатором включения реле, то добавляем в схему светодиод и резистор на 1 кОм. Вот схема.

Теперь, когда на обмотку реле будет подано напряжение, включится светодиод HL1. Это будет указывать на то, что реле включено.
Вместо отдельных транзисторов в схеме можно использовать всего лишь одну микросхему с минимумом обвязки. Подойдёт микросхема ULN2003A. Отечественный аналог К1109КТ22.
Это микросхема содержит 7 транзисторов Дарлингтона. Удобно то, что выводы входов и выходов расположены друг против друга, что облегчает разводку платы, да и обычное макетирование на беспаечной макетной плате.
Работает довольно просто. Подаём на вход IN1 напряжение +5V, составной транзистор открывается, и вывод OUT1 подключается к минусу питания. Тем самым на нагрузку подаётся напряжение питания. Нагрузкой может быть электромагнитное реле, электромотор, цепь из светодиодов, электромагнит и пр.
В даташите производитель микросхемы ULN2003A хвастается, что ток нагрузки каждого выхода может достигать 500 мА (0,5А), что собственно, не мало. Тут многие из нас умножат 0,5А на 7 выходов и получат суммарный ток в 3,5 ампера. Да, здорово! НО. Если микросхема и сможет прокачать через себя такой существенный ток, то на ней можно будет жарить шашлык.
На самом деле, если задействовать все выходы и пустить в нагрузку ток, то выжать без вреда для микросхемы можно будет около ~80 – 100мА на канал. Опс. Да, чудес не бывает.
Вот схема подключения ULN2003A к выходам триггера К561ТМ2.

Есть ещё одна широко распространённая микросхема, которую можно использовать – это ULN2803A.

У неё уже 8 входов/выходов. Я её выдрал с платы убитого промышленного контроллера и решил поэкспериментировать.
Схема подключения ULN2803A. Для индикации включения реле можно дополнить схему цепью из светодиода HL1 и резистора R1.

Вот так это выглядит на макетке.

Кстати, микросхемы ULN2003, ULN2803 допускают объединение выходов для увеличения максимально-допустимого выходного тока. Это может потребоваться, если нагрузка потребляет более 500 мА. Соответствующие входы также объединяются.
Вместо электромагнитного реле в схеме можно применить твёрдотельное реле (SSR - Solid State Relay). В таком случае, схему можно существенно упростить. Например, если применить твёрдотельное реле CPC1035N, то отпадает необходимость в питании устройства от 12 вольт. Достаточно будет 5-вольтового блока питания для питания всей схемы. Также отпадает необходимость в интегральном стабилизаторе напряжения DA1 (78L05) и конденсаторах С3, С4.
Вот так твёрдотельное реле CPC1035N подключается к триггеру на К561ТМ2.

Несмотря на свою миниатюрность, твёрдотельное реле CPC1035N может коммутировать переменное напряжение от 0 до 350 V, при токе нагрузки до 100 mA. Иногда этого достаточно, чтобы управлять маломощной нагрузкой.
Можно применить и отечественные твёрдотельные реле, я, например, экспериментировал с К293КП17Р.
Выдрал его с платы охранной сигнализации. В данной релюшке, кроме самого твёрдотельного реле, есть ещё и транзисторная оптопара. Её я не использовал – оставил выводы свободными. Вот схема подключения.

Возможности К293КП17Р весьма неплохие. Может коммутировать постоянное напряжение отрицательной и положительной полярности в пределах -230. 230 V при токе нагрузки до 100 mA. А вот с переменным напряжением работать не может. То есть постоянное напряжение к выводам 8 – 9 можно подводить как угодно, не заботясь о полярности. Но вот переменное напряжение подводить не стоит.
Дальность работы.
Чтобы приёмный модуль надёжно принимал сигналы от пульта–передатчика, к контакту ANT на плате нужно припаять антенну. Желательно, чтобы длина антенны была равна четверть длины волны передатчика (то бишь λ/4). Так как передатчик брелока работает на частоте в 315 МГц, то по формуле длина антенны составит ~24 см. Вот расчёт.

Где f – частота (в Гц), следовательно 315 000 000 Гц (315 Мегагерц);
Скорость света С – 300 000 000 метров в секунду (м/c);
λ – длина волны в метрах (м).
Те, кто не знает, как переводить приставки Мега- и Кило- в нули, прочтите статью о сокращённой записи численных величин.
Чтобы узнать, на какой частоте работает пульт–передатчик, вскрываем его и ищем на печатной плате фильтр на ПАВ (Поверхностно–акустических волнах). На нём обычно указана частота. В моём случае это 315 МГц.

При необходимости антенну можно и не припаивать, но дальность действия устройства сократится.
В качестве антенны можно применить телескопическую антенну от какого–нибудь неисправного радиоприёмника, магнитолы. Будет очень даже круто .
Дальность, при которой приёмник устойчиво принимает сигнал от брелока небольшое. Опытным путём я определил расстояние в 15 – 20 метров. С преградами это расстояние уменьшается, а вот при прямой видимости дальность будет в пределах 30 метров. Ожидать чего-то большего от такого простого устройства глупо, схемотехника его весьма проста.
Шифрование или "привязка" пульта к приёмнику.
Изначально, брелок и приёмный модуль незашифрованы. Иногда говорят, что не "привязаны".
Если купить и использовать два комплекта радиомодулей, то приёмник будет срабатывать от разных брелоков. Аналогично будет и с приёмным модулем. Два приёмных модуля будут срабатывать от одного брелока. Чтобы этого не происходило, применяется фиксированная кодировка. Если приглядеться, то на плате брелока и на плате приёмника есть места, где можно напаять перемычки.

Выводы от 1 до 8 у пары микросхем кодеров/декодеров (PT2262/PT2272) служат для установки кода. Если приглядется, то на плате пульта управления рядом с выводами 1 – 8 микросхемы есть лужёные полоски, а рядом с ними буквы H и L. Буква H – означает High ("высокий"), то есть высокий уровень.
Если паяльником накинуть перемычку от вывода микросхемы к полоске с пометкой H, то мы тем самым подадим высокий уровень напряжения в 5V на микросхему.
Буква L соответственно означает Low ("низкий"), то есть, накидывая перемычку c вывода микросхемы на полоску с буквой L, мы устанавливаем низкий уровень в 0 вольт на выводе микросхемы.
На печатной плате не указан нейтральный уровень – N. Это когда вывод микросхемы как бы "висит" в воздухе и ни к чему не подключен.
Таким образом, фиксированный код задаётся 3 уровнями (H, L, N). При использовании 8 выводов для установки кода получается 3 8 = 6561 возможных комбинаций! Если учесть, что четыре кнопки у пульта также участвуют в формировании кода, то возможных комбинаций становится ещё больше. В результате случайное срабатывание приёмника от чужого пульта с иной кодировкой становится маловероятным.
На плате приёмника пометок в виде букв L и H нет, но тут нет ничего сложного, так как полоска L подключена к минусовому проводу на плате. Как правило, минусовой или общий (GND) провод выполняется в виде обширного полигона и занимает на печатной плате большую площадь.
Полоска H подключается к цепям с напряжением в 5 вольт. Думаю понятно.
Я установил перемычки следующим образом. Теперь мой приёмник от другого пульта уже не сработает, он узнает только "свой" брелок. Естественно, распайка должна быть одинаковой как у приёмника, так и у пульта-передатчика.

Кстати, думаю, вы уже сообразили, что если потребуется управлять несколькими приёмниками от одного пульта, то просто распаиваем на них такую же комбинацию кодировки, как на пульте.
Стоит отметить, что фиксированный код не сложно взломать, поэтому не рекомендую использовать данные приёмо-передающие модули в устройствах доступа.
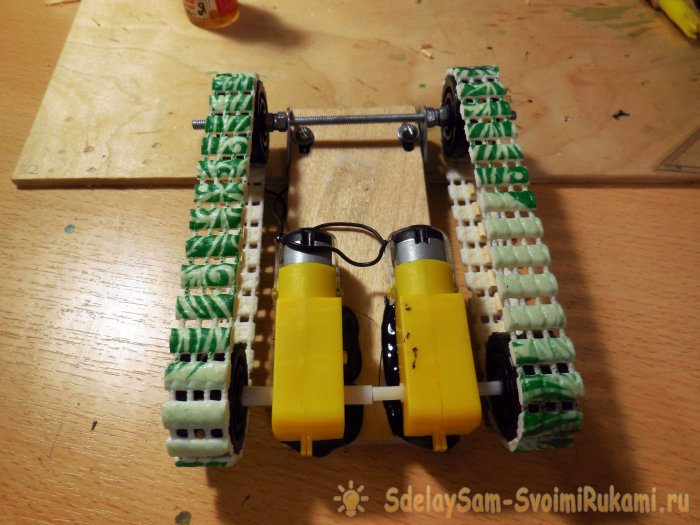
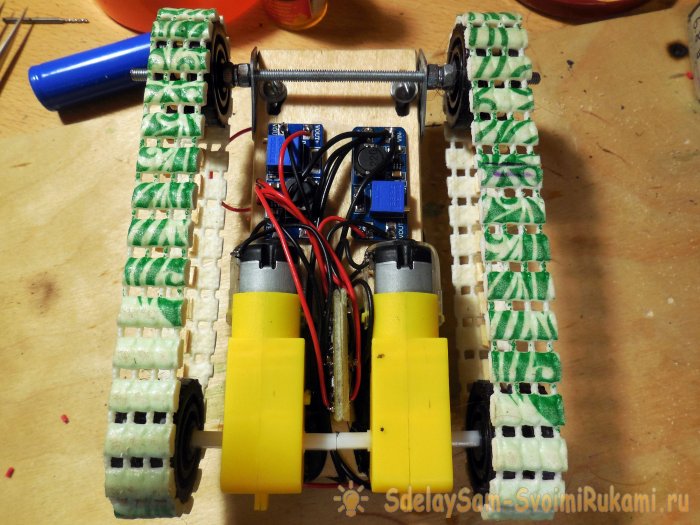
Рассмотрим создание машинки на гусеничном ходу с довольно элементарной конструкцией, собрать которую можно буквально за пару вечеров. Всю конструкцию условно можно разделить на две части – гусеничное шасси и электрическая часть, которая будет обеспечивать дистанционное управление машинкой с пульта.
Изготовление шасси
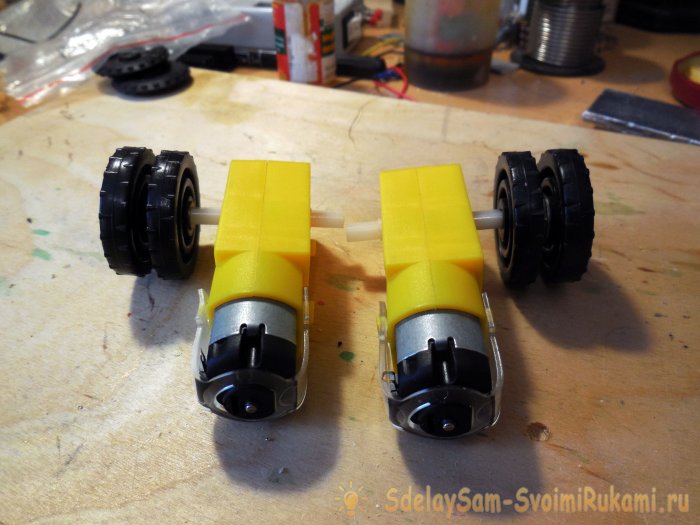
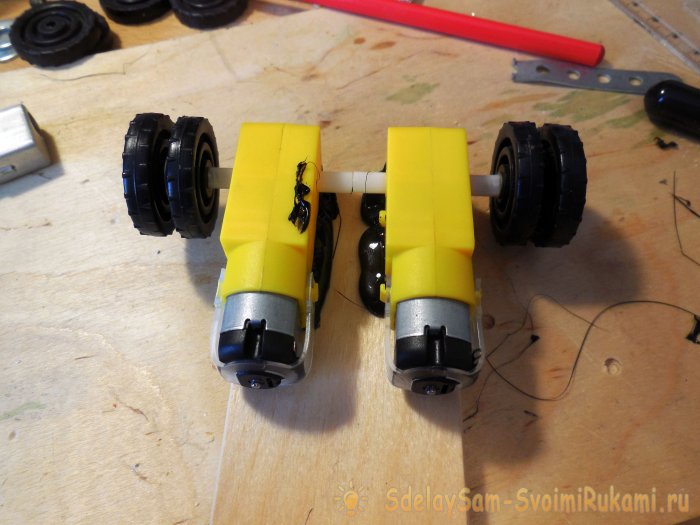
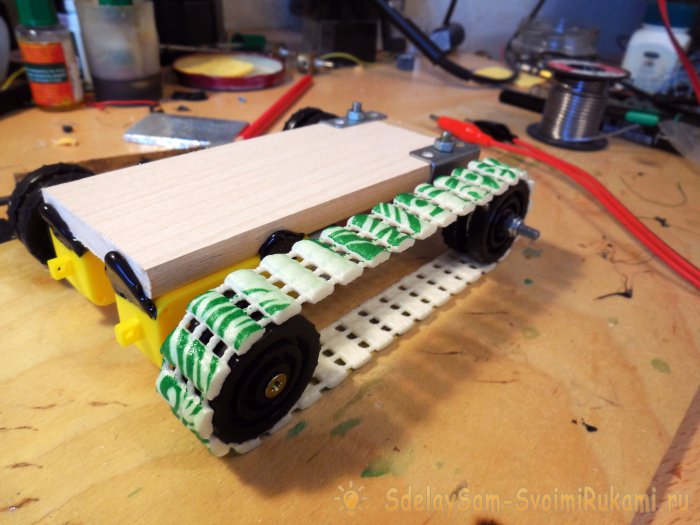
Каждый редуктор имеет выход на два вала, по разные стороны корпуса – для гусеничного шасси задействован будет только один вал с каждого мотора, второй можно удалить вовсе либо оставить на случай, если эти моторы ещё понадобятся в других проектах. На валы необходимо закрепить колёса – сделать это площе всего, вкрутив саморез в сам вал (внутри он полый), таким образом, колёса хорошо зажмутся. Для дополнительной фиксации, и чтобы не раскрутился саморез, можно обильно смазать соединение клеем. Обратите внимание, что колесо двойное – между каждым из колёс делается зазор примерно 3-4 мм, в дальнейшем с его помощью будет фиксироваться гусеница.

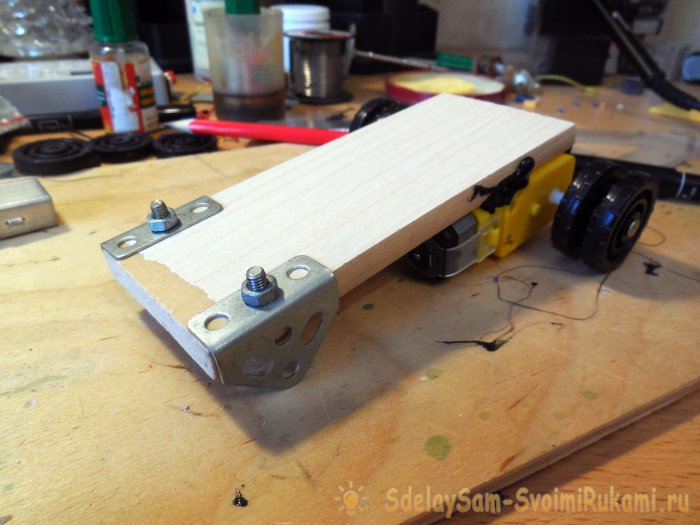
Моторы закрепляются на кусочке прочной фанеры, её размер можно выбрать произвольно, в зависимости от желаемых размеров машинки. Каких-либо удобных мест для крепления данные мотор-редукторы не предусматривают, поэтому зафиксировал я их с помощью термоклея – хорошие клеевые стержни обеспечивают отличное качество соединения, как показал опыт.
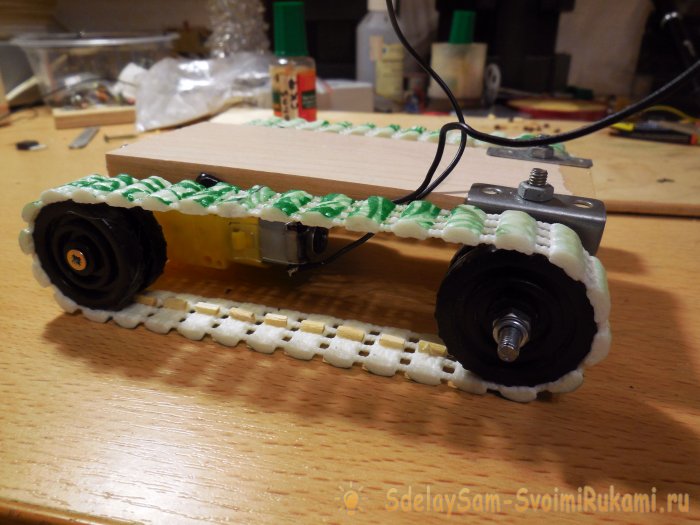
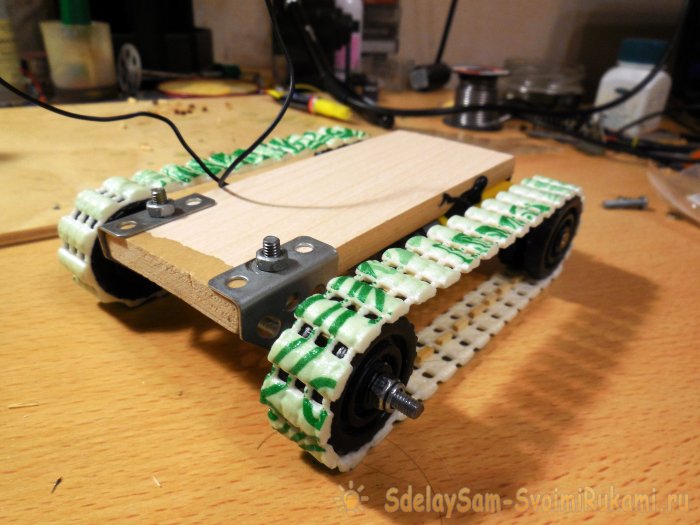
Далее в противоположной стороне от моторов необходимо закрепить уголки для оси передних колёс. Для этого очень рекомендую использовать детали от детского железного конструктора – там можно найти готовые уголки с отверстиями. При сверлении отверстия в фанерке нужно учитывать, что в дальнейшем понадобится регулировка натяжения гусениц, поэтому необходимо просверлить ряд отверстий длиной примерно 1-1,5 см, которые затем соединить в одну продолговатую прорезь. Таким образом, вся передняя ось будет двигаться взад-вперёд, фиксируясь болтами в нужном положении.
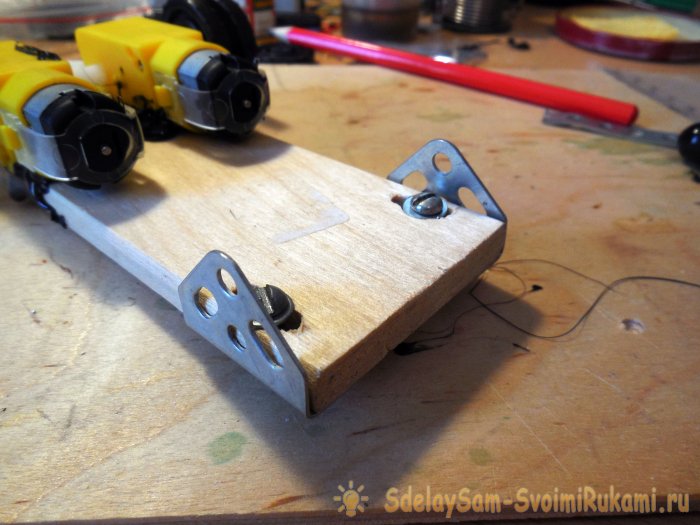
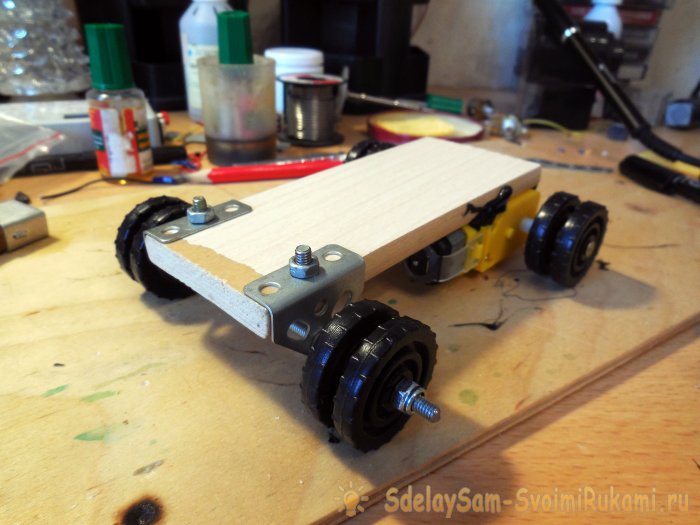
В отверстия в уголках продевается шпилька, удобно использовать м4, она даёт достаточную жёсткость и при этом подходит под отверстия в деталях железного конструктора. Шпильку необходимо жёстко закрепить на уголках, удобно использовать для этого гайки с фиксацией, они не раскрутятся сами собой, когда машинка начнёт ездить. По бокам устанавливаются те же двойные колёса, что и сзади, с точном таким же зазором. Колёса должны свободно вращаться на оси, обеспечить это можно теми же гайками с фиксацией. Обратите внимание, что левые и правые колёса должны вращаться независимо друг от друга. Такие колёса я взял в том же железном конструкторе, однако можно вырезать аналогичные и из пластика, либо из плотного картона, если сложить его в несколько слоёв и склеить.

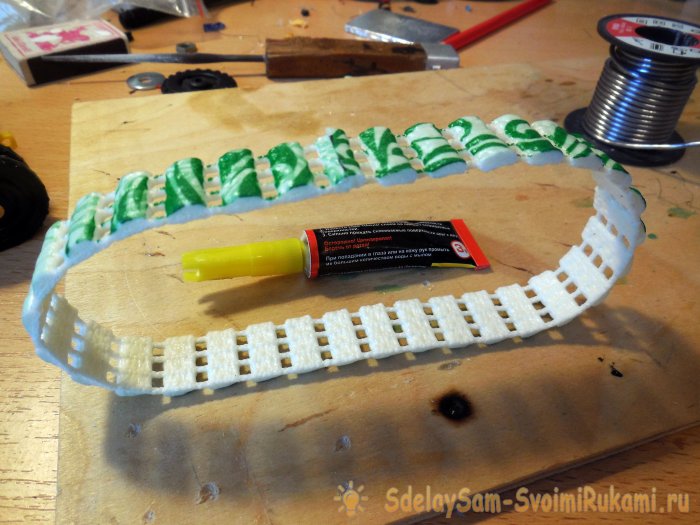
Изготовление гусениц

Затем необходимо приложить ленту к закреплённым на шасси колёсам и отрезать её по необходимой длине, затем концы ленты склеиваются суперклеем. После того, как клей высохнет, можно примерить гусеницу на шасси и даже включить мотор – гусеница будет вращаться, однако быстро спадёт с колёс.

Все те же действия нужно сделать со второй гусеницей. После наклеивания спичек гусеницы можно считать готовыми – теперь они надеются на шасси и уже можно проверить, как поедет будущая машинка, подав напряжение с аккумулятора напрямую на оба мотора. При необходимости нужно отрегулировать силу натяжения – слишком слабая гусеница будет проворачиваться или спадать, а слишком сильно натянутая будет туго вращаться, оказывая дополнительную нагрузку на мотор.
Электрическая часть
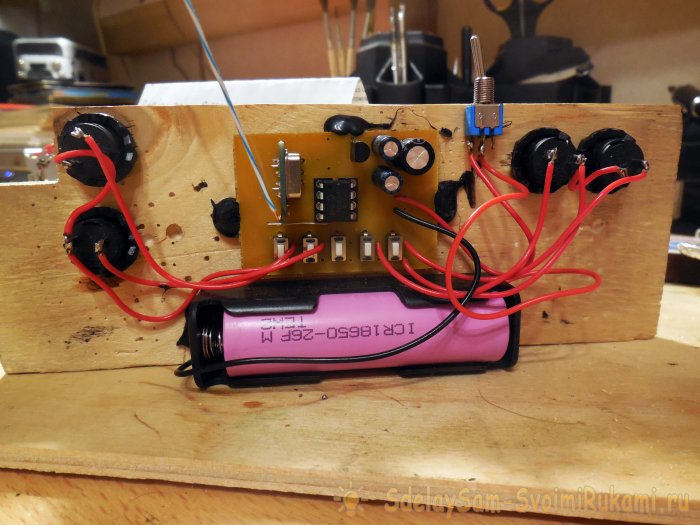
Изготовление пульта
Как один из вариантов – использовать можно готовый пульт от какой-нибудь сломанной/ненужной радиоуправляемой игрушки, если внутри него достаточно места для установки платы кодера. Либо можно изготовить свой пульт, как я и сделал. В качестве основы применил ещё один обрезок фанеры, смонтировав на нём холдер для аккумулятора 18650, плату кодера с модулем-приёмником, а также 4 кнопки, расположив их по максимальному удобству управления. Обратите внимание, что плата кодера уже содержит посадочные места для кнопок на плату – их установка необязательна, разве что для проверки работоспособности после сборки. Рабочие кнопки выводятся с платы на проводах, как на фотографиях ниже.

Монтаж электроники на шасси
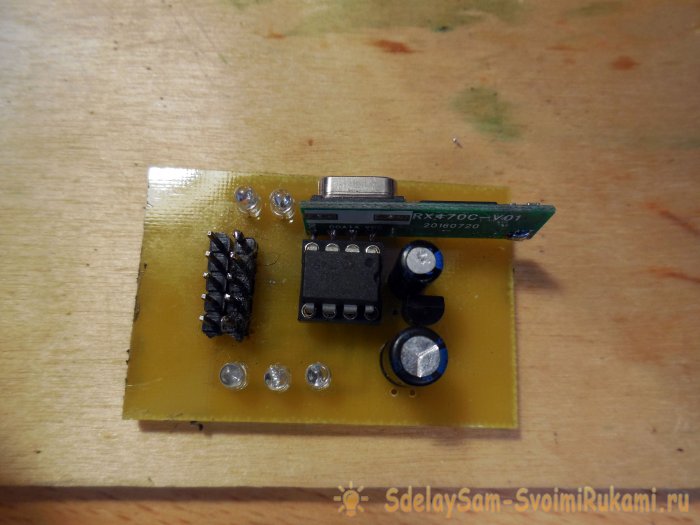
Подробное фото платы декодера. Обратите внимание, что она, так же, как и плата кодера, имеет несколько дополнительных конденсаторов по питанию – они точно не будут лишними в устройствах с микроконтроллерами.
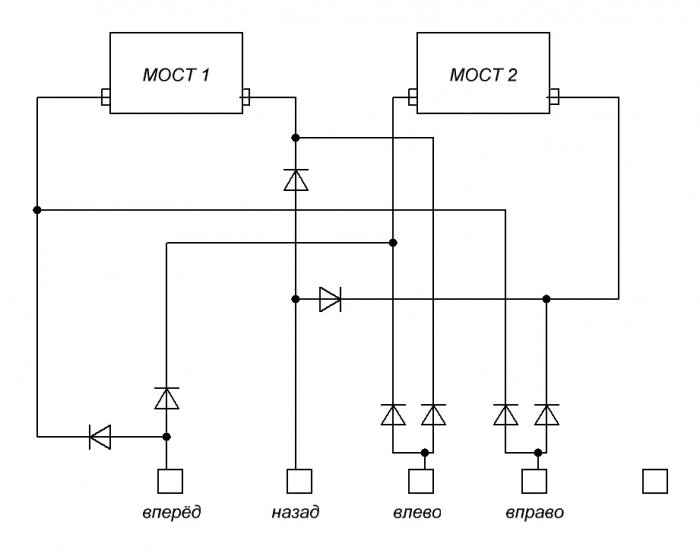
Сборка мостовой схемы
Казалось бы – для чего нужна какая-то мостовая схема, ведь достаточно лишь с помощью ключа подавать напряжение на моторы. И она действительно не нужна в том случае, если машинке не требуется задний ход – а практика показывает, что без него совсем неинтересно. Таким образом, необходимо собрать небольшую дополнительную схемку, которая обеспечит смену полярности для мотора. Меняется полярность – меняется направление движения.
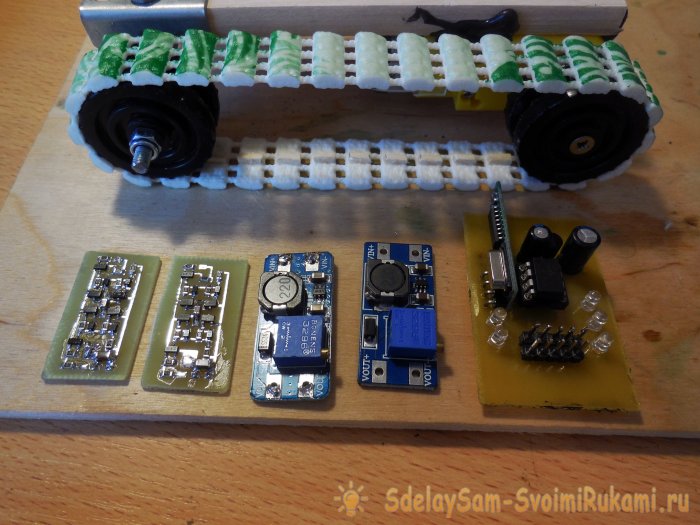
К данной схеме подключается двигатель, а также она содержит два входа – in1 и in2, подали 3-5 вольт на один вход – мотор вращается в одну сторону, подали 3-5 вольт на другой – мотор вращается уже в другую сторону. Если же напряжение не подаётся ни на один вход, либо подаётся на оба входа сразу – мотор не вращается, вот такая простая логика работы. На схеме имеется 4 полевых транзистора, которые будут коммутировать мотор, поэтому они должны быть рассчитаны на достаточно большой ток. Два из них N-канальные, можно использовать АО3400, другие два P-канальные, подойдут АО3401. Также на схеме присутствуют два биполярных NPN транзистора, подойдут BC847 или любые другие аналогичные. Для того, чтобы не занимать много места на шасси рекомендую собрать эту схему именно на SMD-компонентах. Диоды – любые понравившиеся, например, 1N4148W. На вход питания этой схемы (обозначен как 12 V) подаётся напряжение с преобразователя. Обратите внимание, что схему нужно собрать в двух экземплярах – для левого и правого мотора, соответственно питаться они будут с одного и со второго преобразователя. Фото собранных плат ниже.

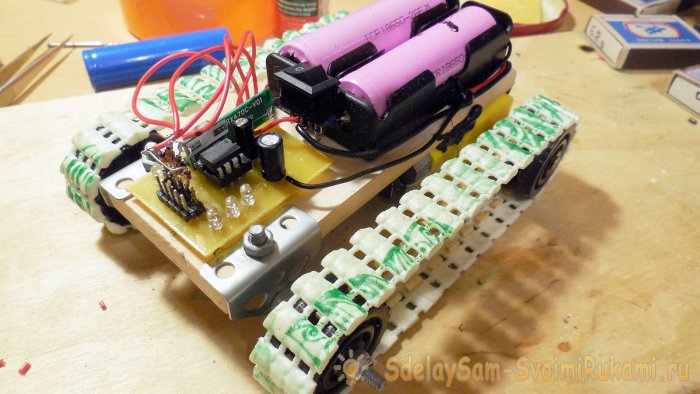
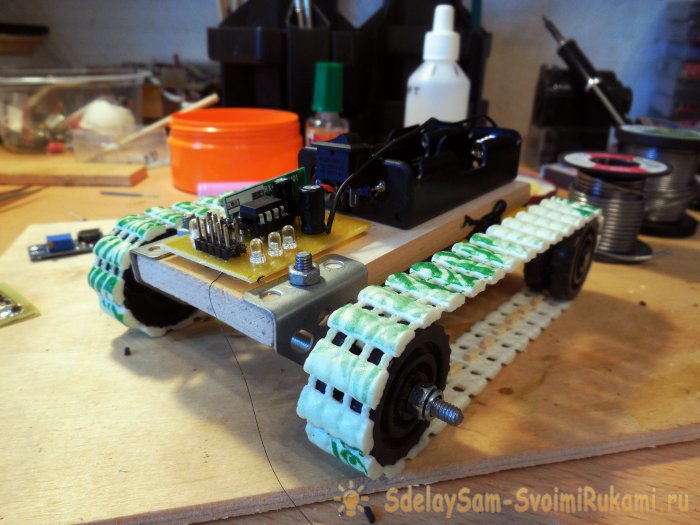
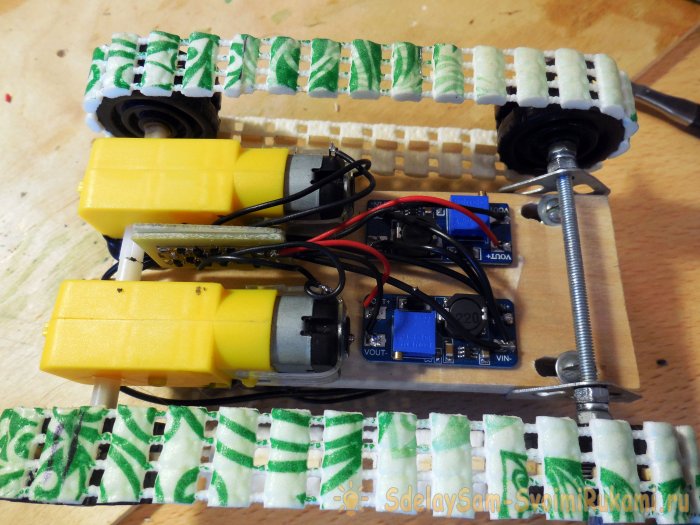
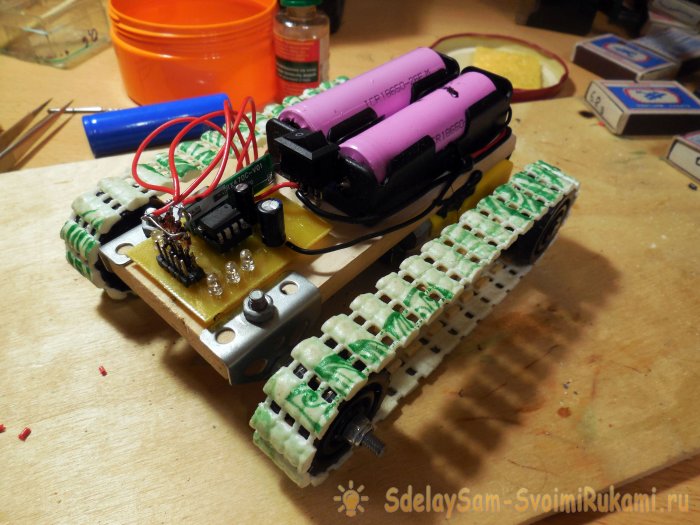
Теперь можно приступать непосредственно к монтажу – и первым делом стоит установить на верхнюю часть шасси пару холдеров под аккумуляторы 18650, именно от них будет питаться вся электроника, аккумуляторы соединяются параллельно.

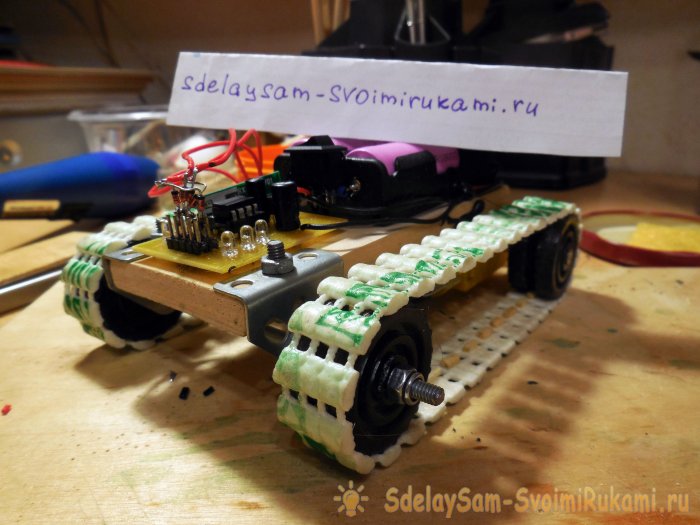
Перед аккумуляторами, в передней части, устанавливается плата декодера, её сразу можно подключить через выключатель к контактам холдеров. Для удобства на этой плате дополнительно установлены 5 светодиодов – при нажатии на клавиши пульта будут загораться соответствующие светодиоды.
На нижнюю часть, под шасси, крепятся пара преобразователей и пара плат-мостов. Сразу всё соединяется проводами – входы преобразователей через выключатель к холдерам, выходы преобразователей на питание плат мостов, а выходы мостов, в свою очередь, уже к моторам. Следует учитывать, что моторы под нагрузкой могут потреблять достаточно большой ток, соответственно на входе преобразователей потребляемый ток будет ещё примерно в 2 раза больше и в некоторые моменты может достигать 1-1,5 ампера, поэтому нужно подводить питание достаточно толстыми проводами.
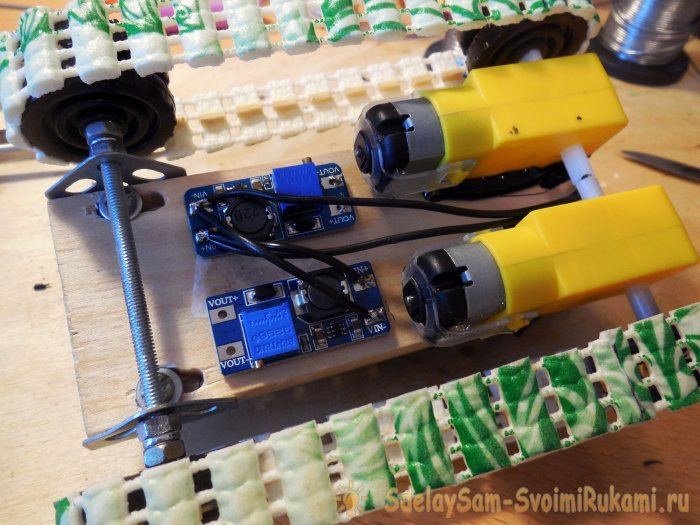
Снизу показаны выходы декодера, при этом один из них свободен, его можно задействовать для других действий. Диоды здесь можно использовать те же 1N4148, припаять их навесным монтажом прямо на выходах декодера.
Испытания
Смотрите видео
Наверное, многие хотели бы дистанционно управлять различными бытовыми приборами, и самодельными устройствами. Но их останавливает сложность изготовления передатчика и приемника, необходимость программирования микроконтроллера. На самом деле сделать радиоуправление сейчас стало очень просто. Ведь сейчас есть очень недорогие готовые радиомодули приемника и передатчика со встроенными декодером и кодером. Например, стоимость комплекта из двух радиомодулей TX118SA-4 и RX480E-4 на популярном источнике радиодеталей, — сайте Алиэкспресс начинается со 150 рублей.
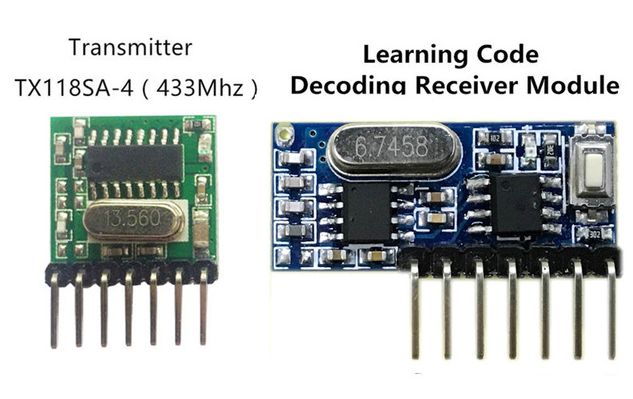
Радиомодули TX118SA-4 и RX480E-4
Рассмотрим что можно сделать из этих радиомодулей.
Модуль передатчика TX118SA-4 представляет собой миниатюрную плату с семью жесткими выводами с краю. На этой плате расположена схема маломощного УКВ передатчика и четырехкомандного кодера на основе микросхемы EV1527. Типовая схема включения TX118SA-4 показана на рисунке 1. Следует заметить что у каждого модуля передатчика есть индивидуальный код идентификации, который необходим для того чтобы приемник реагировал только на сигнал своего передатчика.

На рисунке 2 показана схема приемного узла системы радиоуправления. Это схема уже готового устройства для управления четырьмя объектами при помощи электромагнитных реле.

Плата приемного узла RX480E-4 (или альтернативная маркировка RX480R-4CH) больше платы передатчика. У неё тоже семь жестких выводов, но вывода для антенны нет, — для него сделана дорожка в которую нужно припаять кусочек монтажного провода, — он и будет служить антенной.
Два вывода служат для подачи питания. Номинальное напряжение питания может быть от 3 до 5 В. Четыре выхода команд, логические уровни на которых меняются согласно принятым командам. И седьмой вывод VT, его можно не использовать, он служит для подключения индикаторного светодиода. Но на самой плате есть такой же светодиод. Еще на плате есть кнопка для программирования приемника.
На схеме, показанной на рисунке 2, логические уровни с выходов команд платы приемника подаются на затворы полевых ключевых транзисторов VT1-VT4, управляющих электромагнитными реле.
Напряжение питания радиомодуля приемника может быть от 3 до 5 В, а вот напряжение питания обмоток реле зависит от самих реле, — оно быть должно равно их номинальному напряжению обмоток.
Выходы модуля приемника могут работать в трех режимах, — моностабильном, двухстабильном или переключательном.
В моностабильном режиме при отсутствии командного сигнала на всех выходах нули, а при наличии командного сигнала передатчика на выходе, соответствующем нажатой кнопке передатчика, устанавливается логическая единица, которая держится только пока эта кнопка нажата.
В двухстабильном режиме состояние выхода сохраняется и после отпускания кнопки передатчика. Но при каждом очередном нажатии кнопки состояние соответствующего выхода меняется на противоположное.
В переключательном режиме единица сохраняется и после отпускания кнопки пульта. Но единица может быть только на одном из выходов, то есть, кнопками пульта мы переключаем выходы.
На плате приемника есть кнопка и светодиод.
Если нужен моностабильный режим нажмите кнопку один раз.
Если нужен двухстабильный режим нажмите кнопку два раза.
Если нужен переключательный режим нажмите кнопку три раза.
После этого загорится светодиод. Теперь нажмите любую кнопку передатчика. Приемник примет сигнал, посланный передатчиком и запомнит его идентификационный код. Теперь он будет реагировать только на этот передатчик.
Чтобы стереть все передатчики из памяти приемника нужно кнопку нажать подряд восемь раз.
На Алиэкспресс есть как комплекты передатчик + приемник, так и отдельно. При покупке отдельно нужно знать что совместно будет работать только пара TX118SA-4 и RX480E-4 (или RX480R- 4CH). Кроме того, можно приобрести комплекты с передатчиками, выполненными уже в виде готового брелка. Такой комплект стоит обычно на 100-150 рублей дороже. При покупке брелка отдельно нужно чтобы он был протокола EV1527.
Автор: Каравкин В.
Источник: Радиоконструктор №4/2018
Читайте также: