
Радиопередатчик на ардуино своими руками
Добавил пользователь Alex Обновлено: 19.09.2024
Всем добрый день! Решил сделать радиоуправление (для машинки) на Arduino Pro Mini (Mega168). Принцип такой: передатчик (Pro Mini Mega168) передает 1 байт в котором первые 4 бита - напрвление движения и управление поворотами. В подробности не буду вдаваться - прикреплю скетчи передатчика и приемника - там все расписано. Схема управления в машинке простая:
2 аккумулятора 18650 - от них понижалка LM2596 на 5 вольт - все это питает Ардуинку + серву(повороты) + H-мост моторчика. От LM2596 идет еще понижалка 1117 на 3.3 вольта для питания радиомодуля nrf24l01+.
Схема работает отлично без каких-либо проблем. НО! Надо сделать радиоуправляемой другую машинку. И тут пришлось "изголяться". Машинка типа "Баги", внутреннего пространства почти нет, по этому пришлось вместо 2-х аккумуляторов 18650 ставить один аккумулятор cga103450 (плоский и меньше чем 18650) + повышалку MT3608 на 5 вольт для работы схемы. Еще дно изменение: вместо радиомодуля nrf24l01+ поставил китайскую копию SE8R01. Схема (щелкните для увеличения):
Фото схемы внутри машинки (ногами не пинайте, это пока тестовая сборка) :
На первом фото виднеется слева повышалка, потом идет серва, ардуина и радиомодуль. На втором фото в отсеке для батареек расположился H-мост и аккумулятор.
Если отключить моторчик от H-моста то подобных зависаний нет, но если вместо моторчика поставить хоть какую-то нагрузку (светодиод) то история опять повторяется. Получается что вся беда в H-мосте (когда к нему хоть что-то подключено). Но почему - не понятно. Платку моста снял с машинки. Платка раньше работала без проблем. В чем может быть причина? Из-за чего такой глюк может быть?
Сейчас куда не глянь, везде используют Arduino. Так как эта область мне интересна уже некоторое время, решил все же освоить эту платформу. Для этой цели отлично подошла плата Arduino Nano, а именно версии 3.0 (на основе микроконтроллера Atmega328p) – действительно очень небольшой размер. Удивили кварцевые резонаторы на плате размером 1 мм х 3 мм, причем уже с конденсаторами небольшой емкости. Плату заказывал из Китая с преобразователем USB – UART на микросхеме CH340. Этот вариант более дешевый, чем по сравнению с FT232, но никаких проблем я не вижу, только другие драйвера необходимо устанавливать – специальные для CH340 / 341. В остальном все полностью идентично оригинальным платам Arduino.
Итак, для работы с Arduino нам необходимо установить софт Arduino, посредством которого можно написать код прошивки (прошивка для Arduino называется скетч) и там же в одно нажатие загрузить ее в микроконтроллер. Прошивка происходит через UART (для чего и нужен USB – UART преобразователь), это особенность платформы Arduino, что позволяет без программатора записывать скетчи. На самом деле удобно, а еще достаточно быстро. В целом Arduino у меня создало впечатление того, что это все абсолютно то же самое, что и просто AVR микроконтроллеры, только все переназвано и представлено в другой форме. К слову скетчи компилируются при помощи все того же священного GCC, хотя язык написания программ слегка видоизменен, это уже как бы не Си, но все подчиняется законам языка программирования Си, Си++. Интерфейс софта крайне минималистичен, работает шустро, свои функции выполняет хорошо, а больше и не нужно.
Таким образом, чтобы опробовать платформу Arduino, было решено создать небольшой проект, а именно радио с управлением через персональный компьютер. В итоге родилась схема, по которой собираем устройство:

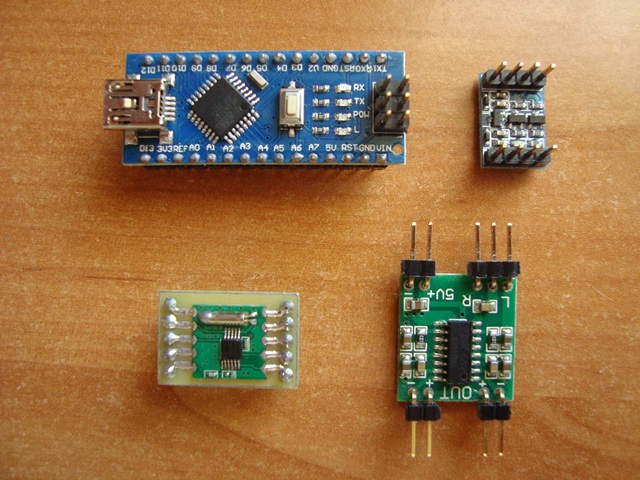
Сразу стоит отметить, что по желанию схему можно минимизировать, но об этом чуть позже. В основе схемы заложена плата Arduino Nano 3.0. На ней же имеется микроконтроллер само собой и интерфейс USB для подключения к компьютеру на основе микросхемы CH340. Это позволит нам обмениваться информацией с компьютером. Дальше я использовал модуль согласования уровней I 2 C для безопасной работы с модулем радио RDA5807M, который работает от напряжения 3 (3,3) вольта. На модуле согласования уровней I 2 C помимо транзисторов расположен стабилизатор напряжения на 3,3 вольта, поэтому на схеме этот стабилизатор также присутствует. Другим вариантом может быть использование просто транзисторов для согласования уровней, либо применить специализированную микросхему, например PCA9517 или аналогичные. Тогда стабилизатор напряжения VR1 можно исключить из схемы, а напряжение 3,3 вольта брать от платы Arduino. Резисторы R3, R4 и R5, R6 необходимы для корректной работы интерфейса I2C, образуя высокий уровень на линиях передачи данных. Номинал можно варьировать в разумных пределах. Как это хорошо видно, в качестве FM тюнера используется модуль на основе RDA5807M. Здесь, как минимум в моем случае в городских условиях (много шума от бытовых приборов, бетонные стены и так далее), необходима антенна достаточной длинны, чтобы сигнал принимался более уверенно, кроме того такую антенну желательно расположить ближе к окну, например, чтобы сигнал ловился наименее заглушенный. Звуковой выход модуля радио соединяется с усилителем звуковой частоты на микросхеме PAM8403. Это усилитель D-класса, мощность до 3 Ватт. По качеству звучания достаточно неплох. Цепь усилителя звуковой частоты построена в соответствии с даташитом. Кроме того, уже готовый модуль можно приобрести (как на фото) и использовать при построении подобных схем. Модуль собран по такой же схеме.
Переменные резисторы R7 и R8 регулируют уровень громкости, желательно использовать вообще один сдвоенный резистор. Динамики лучше всего использовать сопротивлением не менее 8 Ом, чтобы не перегружать USB порт компьютера или ноутбука. При нагрузке в 8 Ом, согласно даташиту, выходная мощность составит 1,4 – 1,8 Вт, что укладывается в стандартную мощность USB порта. Хотя на этот счет можно возразить тем, что современные компьютеры давно вышли из рамок 500 мА на порт и могут выдавать больше на самом деле. При подключении динамиков сопротивлением 4 Ом выходная мощность составит 2,5 – 3,2 Вт, что при учете потребления всей схемы не уложится в 500 мА.
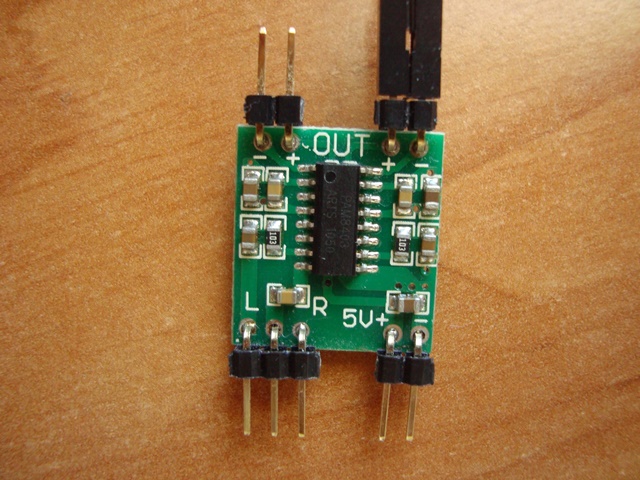
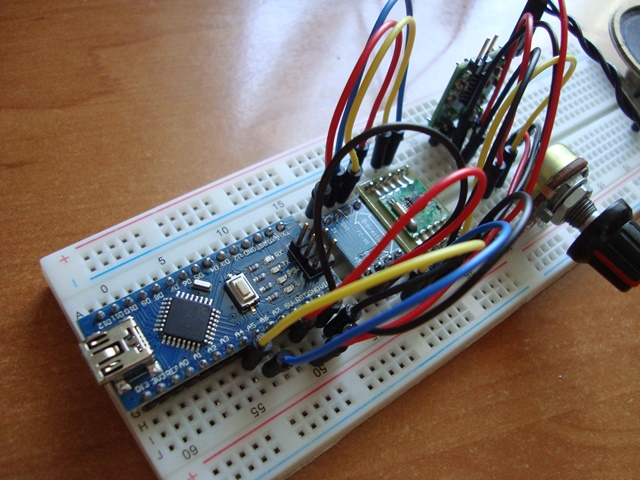
Схема собрана на безпаечной плате с применением модулей (шилдов):
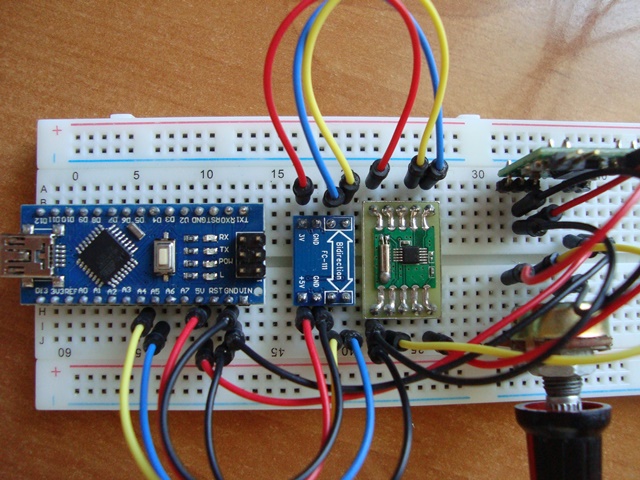
При сборке макета из-за отсутствия второго динамика использовался только один правый канал аудио и соответственно один переменный резистор для регулировки звука.
Раз уж схема настраивается посредством софта на компьютере, то и усилитель с динамиками можно выбросить из схемы и подключать либо напрямую к колонкам, либо через аудио разъем подключиться к входу аудио аудиокарты компьютера (обычно это вход для микрофона) и в настройках разрешить выводить звук на колонки. Можно выбрать любой, удобный для вас способ получения звука от радио. В случае, если подключать к колонкам, резисторы, регулирующие громкость R7 и R8, также можно исключить, так как громкость регулируется либо на самих колонках, либо через Windows. Третий вариант это регулировка уровня громкости через настройки радио модуля, но пока что этой функции нет в софте.
Софт, необходимый для поиска станций радио (скачать можно в конце статьи):

С платой Arduino соединяется через USB – UART преобразователь (он уже является частью платы Arduino).
В данной разработке не преследовалось целей сделать что-то супер функциональное, это скорее некоторый опыт работы на основе Arduino со всеми вытекающими последствиями.
К статье прилагается скетч для Arduino, программа FM для настройки станций, видео работы устройства.
Сегодня мы займёмся подключением радиомодуля, а точнее, двух модулей – приёмника XY-MK-5V и передатчика FS1000A – к Arduino. Тоже к двум.
Нам понадобится:
1 Описание радиопередатчика FS1000A и приёмника XY-MK-5V

Внешний вид приёмника XY-MK-5V и передатчика FS1000A
2 Подключение к Arduino радиопередатчика FS1000A и приёмника XY-MK-5V
Прежде чем подключать передатчик FS1000A к Arduino, необходимо к контактной площадке, обозначенной на плате ANT, припаять отрезок провода сечением примерно 0,25…0,5 мм и длиной 17,3 см. Это будет антенной.
Частоте 433 МГц соответствует длина волны, равная примерно 69 см. При длине антенны, равной 1/4 от длины волны, волновой вибратор (антенна) находится в резонансе с длиной волны, и её эффективность максимальна. Отсюда число 17,3 см (= 69 / 4).
Передатчик FS1000A можно запитать напряжением от 3,3 до 12 В. В зависимости от поданного напряжения дальность передачи может несколько меняться: при большем напряжении – большая дальность. Мы подадим на передатчик напряжение 5 В, и остальные выводы подключим согласно схеме.

Схема подключения передатчика FS1000A к Arduino
Приёмник XY-MK-5V подключается тоже просто. Вывод "DATA" на модуле сдвоен, можно подключаться к любой из двух ножек. Питание также подадим 5 В от платы Arduino.

Схема подключения приёмника XY-MK-5V к Arduino
3 Пример простейшей передачи данных по радиоканалу с помощью Arduino
Особенностью радиопередачи является то, что длительные сигналы одного уровня передавать невозможно, передача будет срываться. Для более-менее устойчивой передачи необходимо передавать переменный сигнал. Причём необходимо каким-то образом выделять полезный сигнал из шума, который всегда присутствует в радиоэфире.
Для первого эксперимента возьмём стандартный скетч мигания светодиодом Blink и немного модифицируем его: каждые 5 секунд будем посылать команду с одного Arduino (передатчика) к другому (приёмнику). По принятии команды приёмник будет либо зажигать светодиод, если он погашен, либо гасить. То есть каждые 5 секунд приёмник будет менять своё состояние по принятой команде. Сделать это немного сложнее, чем кажется, ведь нам нужно выделить команду из постоянно присутствующего в эфире шума.
Первый скетч – для передатчика. Он довольно простой.
Временная диаграмма команды приведена на рисунке:
Передаваемая в радиоэфир команда Временная диаграмма двух идущих подряд команд
Скетч для приёмника, ввиду описанных выше причин, сложнее. Поэтому для начала давайте просто периодически читать данные на входе приёмника и выводить то, что принимаем, в последовательный порт.
В мониторе последовательного порта мы увидим череду из быстро сменяющихся единиц и нулей. Если полученные за примерно 17 секунд данные отобразить графически, то увидим следующее:

Данные+шум на входе приёмника
Как видно, на входе приёмника постоянно присутствует шумовой сигнал. Моменты, когда излучает передатчик, легко отслеживаются на глаз (на рисунке они выделены синими пунктирными рамками). После окончания передачи ненадолго устанавливается нулевой уровень, но затем система автоматической регулировки усиления снова усиливает шумы, и на входе приёмника появляется хаотичная смена логических уровней.
Однако, выделение полезного сигнала из шума с помощью аппаратуры не так просто, как на глаз.
Для простоты возьмём период опроса данных (период дискретизации) со входа приёмника 50 мс – это число равно длительности самой короткой части команды, которую мы каждые 5 секунд отправляем передатчиком в радиоэфир. Снимая по одному отсчёту за 50 мс мы, конечно же, нарушаем теорему Котельникова (период дискретизации надо брать хотя бы 25 мс или меньше). Но для максимального упрощения примера оставим так и посмотрим, сможем ли выделить из шума в радиоэфире нашу команду.

Длительность логических уровней передаваемой команды
Опрашивая данные с приёмника каждые 50 мс (зелёные вертикальные штрихи на рисунке – моменты опроса приёмника), мы должны увидеть последовательность "110101100". При этом вероятность ложных срабатываний нашего детектора будет достаточно высока, т.к. есть немалый шанс, что в моменты считывания данных с приёмника случайный шумовой сигнал будут иметь точно такие же значения. К счастью, в конце последовательности имеется большое число нулей. Так что будем искать последовательность, скажем, "11010110000000".
Функция ShiftReg() получает на вход два аргумента: текущее содержимое тестового регистра и последнее полученное со входа приёмника значение. Она сдвигает все значения в регистре на 1 позицию, а в младший разряд регистра помещает текущее принятое значение. Таким образом, в регистре постоянно хранятся 16 (в данном конкретном случае) последних считанных с приёмника значений. Если мы посмотрим как меняется содержимое регистра, которое формируется функцией ShiftReg(), то увидим примерно следующее:
Выводы
На практике, полученный детектор довольно хорошо справляется с поставленной задачей. Светодиод на плате Arduino, к которой подсоединён приёмник, каждые 5 секунд ожидаемо меняет своё состояние. Это от него и требовалось.
Однако в реальности, как правило, возникают более сложные задачи, а именно – передавать какие-то осмысленные данные. В следующей статье, посвящённой работе с модулями XY-MK-5V и FS1000A, я детально рассмотрел возможность передачи данных по радиоканалу. Идея ориентирована на передачу между двумя компьютерами с помощью модулей UART. Но Arduino также имеет линии Rx и Tx, относящиеся к UART. Так что адаптировать идею к использованию с Arduino, уверен, не составит большого труда.

Данная машинка получилась более быстрая и удобная в управлении. Но все равно чего-то не хватает: гибкости настройки программы, чувствительности джойстика и пр.
Поэтому я решил сделать машинку на радио управлении.
Что мне понадобится.
Пульт:
Машинка:
5. Источник питания. Я использовал power bank
6. Провода для подключения можно взять от мышки, USB- зарядки и пр. что у вас не работает и лежит без дела.
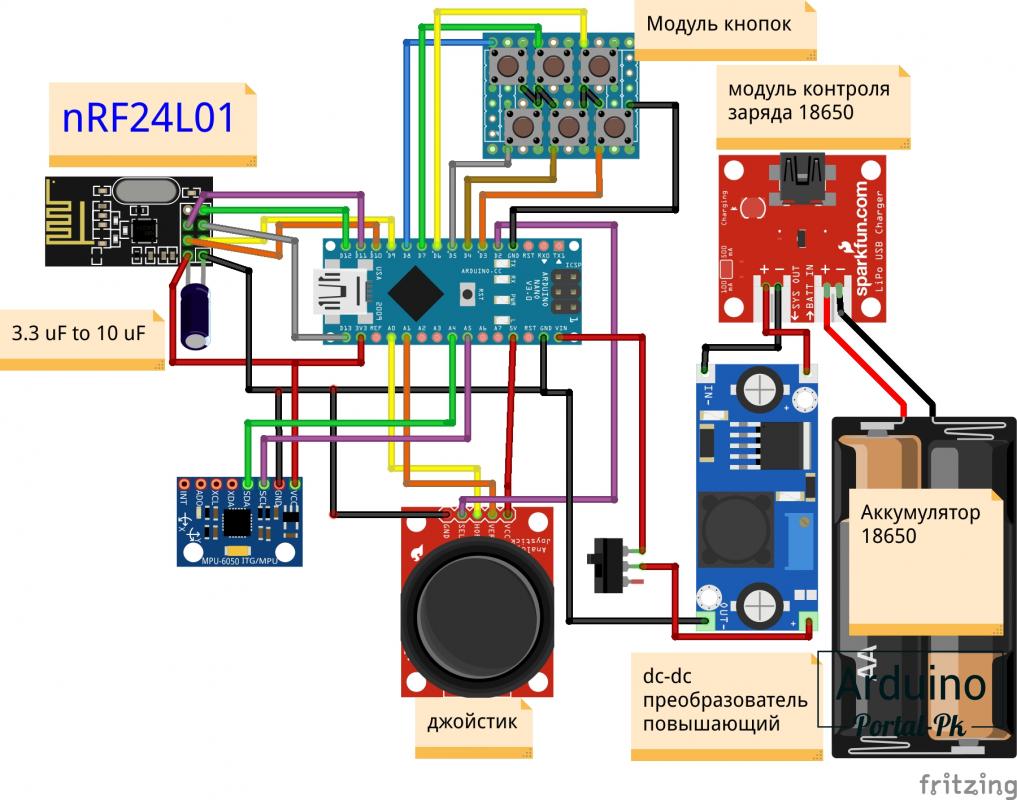
Схема подключения пульта управления на Arduino + NRF24L01 + гироскоп GY-521 MPU-6050 выглядит вот так.
Скетч в среде программирования Arduino IDE выглядит вот так.
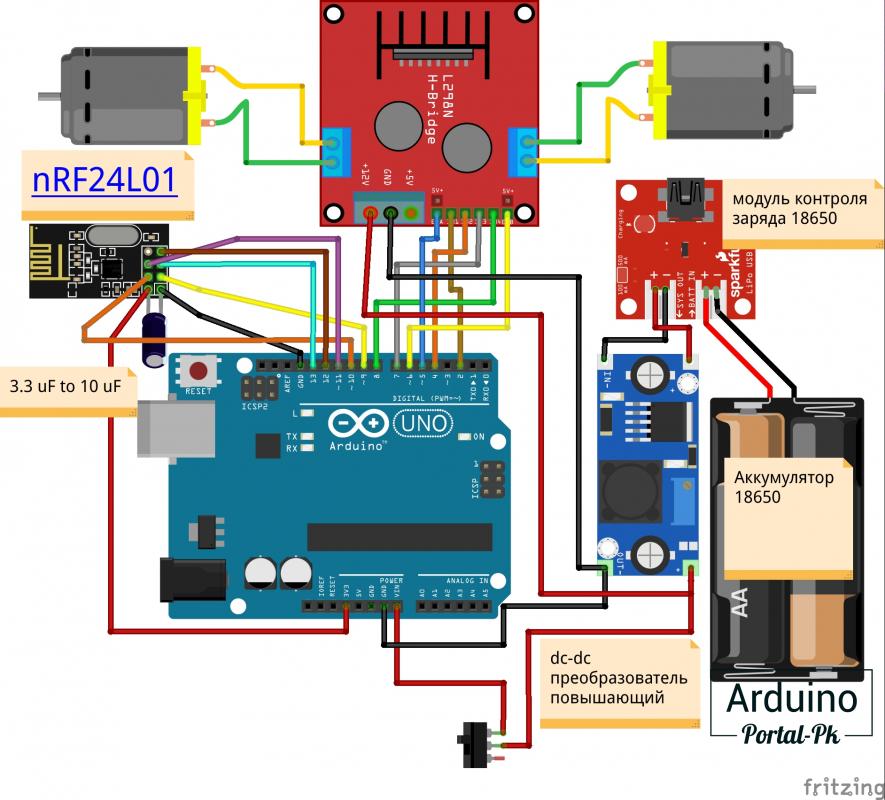
Схема подключения Ардуино машинки на на радио управлении NRF24L01 выглядит вот таким образом.
Скетч среде программирования Arduino IDE для радио Arduino машинки.
Читайте также: