
Подставка для gps квадрокоптера своими руками
Добавил пользователь Владимир З. Обновлено: 05.10.2024
Сегодня в интернете множество статей на тему "собрать квадрокоптер своими руками", а самый лёгкий способ сделать квадрокоптер, для новичка, это сделать его "по инструкции", поэтому достаточно найти качественную статью-инструкцию и попытаться повторить творение автора. Главное не только знать какой летательный аппарат Вам нужен, но и на какие перспективы Вы рассчитываете. Я хотел коптер "с запасом", чтоб была возможность повесить камеру (типа Gopro) на бесколлекторный подвес и транслировать видео "на землю". А "Пустой" же т.е. не нагруженный, смог летать максимально длительное время. Найти готовую статью не смог, поэтому пришлось "перелопатить" груду материалов.
Эта статья о квадрокоптере предназначенного для FPV - полет с камерой от первого лица и аэрофотосъёмки. Аэрофотосъемка планируется нетолько с GoPro (и аналоги), но и с возможностью погрузить на борт более менее приличную "мыльницу" (150-250 грамм). Плюс чтоб время полета было длительным и чтоб в экстренных и любых непредвиденных случаях автопилот возвращал аппарат "домой".
Самое сложное в сборке первого квадрокоптера это принять решение "какой коптер" и "для каких целей" он нужен, сделать заказ и оплатить, сумма выходит не малая.
Далее речь, в этой статье, пойдет о среднем коптере, размером рамы 450 мм, весом 1.4 - 2.3 кг.
Рама и силовая часть с пропеллерами.
- Рама для квадрокоптера F450 - 450mm

- Двигатель AX-2810Q 750кв

- Регулятор оборотов ESC Turnigy Multistar 40A V2 Slim BLHeli Multi-Rotor Brushless OPTO 2-6S


- Пропеллеры 12x6 карбон, дешевые, с Aliexpress

Полетный контроллер (мозг) - я выбрал APM 2.6:
- замечательный бюджетный вариант. Хотя есть более дешевые варианты, но APM (ardu pilot mega) обладает всеми функциями "продвинутого" полетного контроллера. К нему подключаю GPS модуль для того, чтоб автопилот мог вернуть коптер "домой" в случае пропадания связи.

Для полета по камере также устанавливаю OSD - это наложение, на транслируемое видео, телеметрических данных: скорость полета, высота, стрелочка указывающая путь домой и самое главное данные о заряде батареи - с земли можно видеть энергопотребление и прогноз насколько долго еще хватит батареи.
Так же для получения данных о состоянии батареи необходим модуль питания:

FPV комплект для трансляции видео с квадрокоптера на землю включает в себя комплект приемник и передатчик:
Рабочая частота 5.8 ГГц. Мощность передатчика (на фото с права) 600 мВт - что при нормальных антеннах должно в прямой видимости держать устойчивый прием на растоянии свыше 5 км. Изначально этот комплект я расчитывал для самолета и полета на 10 км, поэтому он черезчур мощный и тяжеловат. Вес передатчика 40 гр вместе со штатной антенной.
В таком комплекте лучше сменить штатные штырьевые антенны(диполь) на современные антены круговой поляризации называющиеся - "клевер" они обеспечивают более стабильный прием/передачу сигнала, т.е. на видео будет меньше шумов:


На земле смотреть изображение планирую в дешевом видео шлеме:

Поставляется шлем в разобранном виде, как на фото справа. Что собой представляет шлем: пенопластовый корпус (EPO), ЖК экран (5") и линза френеля. Т.е. линза позволяет более-менее комфортно смотреть на экран на близком расстоянии (5-6 см), в итоге Вы видите большой экран. Из за такой линзы есть небольшие искажения по краям видимой области. Из минусов этого шлема - это ЖК экран низкого разрешения 640 точек, чувствуется зернистость, поэтому любители и энтузиасты заменяют стандартный экран на экран такого же размера, но большего разрешения, например 840 точек на дюйм, главное, чтоб в нем отсутствовал черный или синий экран при отсутствуии сигнала, т.к. при плохом приеме важно видеть хотяб очертания изображения сквозь помехи.
Стоимость такого шлема (монитора) составляет около 2000 руб (35$). Существуют и другие модели шлемов с разрешением экрана 1280, качество и ощущение присутствия в таких на высшем уровне, но и цена выше.
Что касается видео очков, то их качество оценивается весьма крупной стоимостью (за счет компактности). Нормальный очки Fatshark (640 dpi) по качеству будут не намного выше шлема за 2000 руб, а цена их будет держаться около 8000 руб. Дешевые видео очки с aliexpress больше подойдут "пассажиру" нежеле чем пилоту.

Производитель заявляет, что в очках имитируется виртуальный дисплей диагональю 52 дюйма, это так и есть (но на растоянии 5-6 метров), смотреть кино абсолютно приемлемо, но в полетах с камерой нужно не только в пространстве ориентироваться, но и на местности, а так же небходимо отвлекаться на данные OSD, которые на маленьком зернистом экране выглядят мелкими. Новичку такие очки не советую. Цена описаных очков 100$, их разрешение всего 320х240.
Камера на квадрокоптере, для записи и трансляции видео будет установлена на 2х осевом бесколлекторном подвесе с алиэкспресса. Камера выбрана SJ5000.

Ожидается, что получится примерно такой дрон:


Антивибрационная патформа для APM - апм принято устанавливать на антивибрационную подставку, это улучшает стабильность работы контроллера.
BEC - это стабилизатор питания преобразующий входящие 11.1 или 14.8 вольт в 5 вольт, которые используются для питания приемника, полетного контроллера и д.р. Он необходим т.к. мои ESC (регулятор оборотов бесколлекторного двигателя) без встроенного BEC.

Вес моего коптера составил:
- рама, 4 двигателя, 4 ESC, 1 BEC, APM, плата разводки питания с коннекторами XT60, приемник, "ноги" - 990 гр.
- FPV набор: minimosd-6гр, курсовая камера-20гр, передатчик видео с антенной-30гр, GPS модуль-30гр.
- Видеосъемка: двух осевой подвес-212гр, камера SJ4000-70гр.
- Аккумулятор: 5000мАч 4S 30C - 650гр.
Итого пустой: 1 кг - с аккумулятором 1650 гр.
с FPV комплектом - 1100 и 1750гр с аккумулятором.
с бесколлекторным подвесом и камерой-2,1 кг.
Длительность полета так же хочется увеличить за счет больших винтов. Поэтому тестировать буду в следующей комплектации: двигатели описаны выше, винты 12х4.5 с питанием 3s (11.1 вольт) и второй вариант винты 10х4.5 питание 4s (14.8).
Как выбрать двигатель/раму для квадрокоптера?
Вы должны знать вес будущего летательного аппарата, вес полностью загруженного - рама, двигатели, регуляторы, приемник, видеопередатчик, OSD, GPS, контроллер полетный, камера, аккумулятор, подвес для камеры и т.д. Под этот вес выбираются двигатель/пропеллер - ВМГ - винтомоторная группа и аккумулятор.
Винтомоторная группа развивает определенную тягу в граммах, обычно продавец или производитель публикует технические характеристики: потребляемый ток, вольтаж/пропеллер, сила тяги в граммах.

Пример: вертикально расположена шкала тяги в граммах, по горизонтали потребление тока в амперах. Вольтаж 14.8 (4S), два графика - один для пропеллера 11х4.7 второй для 10х4.7
К сожалению не на каждый двигатель найдутся данные о силе тяги или они могут быть не совсем корректны. Зачастую эти данные выкладывают в комментариях, энтузиасты поводящие замер. И в принципе это правильно, купил двигатель установил на стенд с весами и начинаешь тестирование, перебирая варианты пропеллеров, заявленные производителем, на каком из пропеллеров выше тяга и умеренный нагрев тот и подойдет.
Например Вы нашли двигатель с тягой 1 кг, в квадро-коптере 4 двигателя соответственно 4 кг тяги. Тяговооруженность - это запас можности по тяге, т.е. если квадрик будет весить 4 кг и тяга составляет 4 кг, то тяговооруженность равна единице (1 - не полетит), для коптеров нужно от 2 до 3.
Теперь, когда вы выбрали или спроектировали раму БПЛА, выбрали моторы, несущие винты, ESC и батарею, можно приступить к выбору полётного контроллера. Полётный контроллер для мультироторного беспилотного летательного аппарата представляет собой интегральную схему, обычно состоящую из микропроцессора, датчиков и входных/выходных контактов. После распаковки контроллер полёта не знает какой конкретный тип или конфигурацию БПЛА вы используете, поэтому изначально необходимо будет установить определенные параметры в программном обеспечении, после чего заданная конфигурация загружается на борт. Вместо того, чтобы просто сравнивать доступные в настоящее время полётные контроллеры, подход, который мы здесь использовали, перечисляет, какие элементы ПК отвечают за какие функции, а также аспекты, на которые необходимо обратить внимание.
Основной процессор

8051 vs AVR vs PIC vs ARM: Семейство микроконтроллеров составляющее основу большинства современных контроллеров полёта. Arduino основан на AVR (ATmel), и сообщество, похоже, сосредоточено на MultiWii, как на предпочтительном коде. Microchip является основным производителем чипов PIC. Трудно утверждать, что одно лучше другого, всё сводится к тому, что может делать программное обеспечение. ARM (например, STM32) использует 16/32-битную архитектуру, при этом десятки используют 8/16-битные AVR и PIC. Поскольку одноплатные компьютеры становятся все менее и менее дорогостоящими, ожидается появление полётных контроллеров нового поколения, которые могут работать с полноценными операционными системами, такими как Linux, или Android.
Программная память/Флэш: Флэш-память — это место, где хранится основной код. Если программа сложная, она может занимать много места. Очевидно, что чем больше память, тем больше информации она может хранить. Память также актуальна при хранении данных в полёте, таких как координаты GPS, планы полёта, автоматическое движение камеры и т.д. Код, загруженный на флэш-память, остается на чипе даже после отключения питания.
EEPROM: электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) обычно используется для хранения информации, которая не изменяется во время полёта, например настройки, в отличие от данных, хранящихся на SRAM, к которым могут относиться показания датчика и т.д.
Дополнительные порты Ввода/Вывода: большинство микроконтроллеров имеют большое количество цифровых и аналоговых портов ввода и вывода, на контроллере полёта некоторые используются под датчики, другие для связи, либо для общего ввода и вывода. К этим дополнительным портам могут быть подключены RC сервоприводы, системы подвеса, зуммеры и многое другое.
Питание

Повторим. В идеале не нужно запитывать контроллер полёта отдельно от основной батареи. Единственное исключение — если вам нужна резервная АКБ на случай, когда основная батарея отдаёт столько энергии, что BEC не может вырабатывать достаточно тока/ напряжения, вызывая тем самым отключение питания/сброс. Но, в таком случае вместо резервной батареи часто используют конденсаторы.
Сенсоры
С точки зрения аппаратного обеспечения, контроллер полёта по сути является обычным программируемым микроконтроллером, только со специальными датчиками на борту. Как минимум, контроллер полёта будет включать в себя 3-осевой гироскоп, но без автовыравнивания. Не все контроллеры полёта оснащаются указанными ниже сенсорами, но они также могут включать их комбинацию:
- Гироскоп: Гироскоп измеряет скорость изменения углов по трём угловым осям (назовём их: альфа, бета и гамма). Обычно измеряется в градусах в секунду. Обратите внимание, что гироскоп не измеряет абсолютные углы напрямую, но вы можете выполнить итерацию, чтобы получить угол, который, как и у акселерометра, способствует дрейфу. Выход реального гироскопа имеет тенденцию быть аналоговым или I2C, но в большинстве случаев вам не нужно беспокоиться об этом, так как все поступающие данные обрабатываются кодом контроллера полёта. Гироскоп должен быть установлен так, чтобы его оси вращения совпадали с осями БПЛА.
- Инерционный измерительный блок (IMU): IMU — по сути, это небольшая плата, которая содержит как акселерометр, так и гироскоп (обычно многоосевые). Большинство из них включают трёхосевой акселерометр и трёхосевой гироскоп, другие могут включать дополнительные сенсоры, например трёхосевой магнитометр, обеспечивающий в общей сложности 9 осей измерения.
- Компас/Магнитометр: Электронный магнитный компас способный определять магнитное поле Земли и использовать эти данные для определения направления компаса беспилотника (относительно северного магнитного полюса). Этот сенсор почти всегда присутствует, если система имеет GPS вход и доступно от одной до трех осей.
- Давление/Барометр: Так как атмосферное давление изменяется по мере удаления от уровня моря, можно использовать сенсор давления, чтобы получить довольно точные показания высоты БПЛА. Для расчёта максимально точной высоты, большинство контроллеров полёта получают данные одновременно от сенсора давления и спутниковой системы навигации (GPS). При сборке обратите внимание, что предпочтительнее, чтобы отверстие в корпусе барометра было накрыто куском поролона, это уменьшить отрицательное влияние ветра на чип.
- Расстояние: Датчики расстояния все чаще используются на беспилотниках, поскольку GPS-координаты и датчики давления не могут рассказать вам, насколько далеко вы находитесь от земли (холма, горы или здания), либо столкнётесь ли вы с объектом или нет. Датчик расстояния, обращенный вниз, может быть основан на ультразвуковой, лазерной или лидарной технологии (ИК-сенсоры могут испытывать проблемы в работе при солнечном свете). Датчики расстояния редко входят в стандартный комплект полётного контроллера.
Режимы полёта
- ACRO — обычно режим по умолчанию, из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп (беспилотник не может автоматически выравниваться). Актуален для спортивного (акробатического) полёта.
- ANGLE — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп и акселерометр. Углы ограничены. Будет удерживать беспилотник в горизонтальном положении (но без удержания позиции).
- BARO (Altitude Hold) — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и барометр. Углы ограничены. Барометр используется для удержания определенной (фиксированной) высоты, когда с аппаратуры управления не подаются никакие команды.
- MAG (Heading Hold) — режим блокировки курса (направления компаса), беспилотник будет сохранять Yaw ориентацию. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- HEADFREE (CareFree, Headless, Безголовый) — исключает отслеживание ориентации (Yaw) дрона и тем самым позволяет перемещаться в 2D направлении согласно перемещению стика управления ROLL/PITCH. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- GPS/Return to Home — автоматически использует компас и GPS, чтобы вернуться к месту взлёта. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Waypoint — позволяет беспилотнику автономно следовать по предварительно установленным GPS точкам. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Position Hold — удерживает текущую позицию с помощью GPS и барометра (если доступен). Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- Failsafe (аварийный/отказоустойчивый режим) — если другие режимы полёта заданы не были, беспилотник переходит в режим Acro. Из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп. Актуален при сбоях в программном обеспечении беспилотника, позволяет восстановить контроль над БЛА посредством ранее предустановленных команд.
Программное обеспечение

ПИД-регулятор (назначение и настройка)
Proportional Integral Derivate (PID) или Пропорционально-интегрально-дифференцирующий регулятор (ПИД) — часть программного обеспечения полётного контроллера, которое считывает данные с сенсоров и вычисляет, как быстро должны вращаться моторы, чтобы сохранить желаемую скорость перемещения БЛА.
Разработчики готовых к полёту БЛА как правило оптимально настраивают параметры ПИД-регулятора, поэтому большинство RTF беспилотников отлично пилотируются прямо из коробки. Чего не скажешь про кастомные сборки БЛА, где актуально использование универсального полётного контроллера подходящего для любой мультироторной сборки, с возможностью регулировки значений PID до тех пор, пока они не будут соответствовать требуемым характеристикам полёта конечного пользователя.

GUI
Graphical User Interface (GUI) или Графический интерфейс пользователя — это то, что используется для визуального редактирования кода (при помощи компьютера), который будет загружен в полётный контроллер. Программное обеспечение, поставляемое с контроллерами полёта, продолжает становиться все лучше и лучше; первые контроллеры полёта использовали в основном текстовые интерфейсы, которые требовали, чтобы пользователи понимали почти весь код и меняли определенные разделы в соответствии с проектом. В последнее время в GUI применяются интерактивные графические интерфейсы, с целью облегчить пользователю настройку необходимых параметров.
Связь
-
(взлёт и снижение) (вращение вокруг своей оси влево и вправо) (движение вперёд и назад) (движение влево и вправо)
- Арминг (Arming или Arm)/Дизарминг (Disarming или Disarm) — постановка/снятие с охраны моторов.
- Управление подвесом (панорамирование вверх/вниз, вращение по часовой стрелке/против часовой стрелки, зуммирование)
- Смена режимов полёта (ACRO/ANGLE и т.д.)
- Активировать/Задействовать полезную нагрузку (парашют, зуммер или другое устройство)
- Любое другое применение
- Не все RC передатчики могут обеспечить полный диапазон RC сигналов от 500мс до 2500мс; некоторые искусственно ограничивают этот диапазон, так как большинство используемых RC предназначены для радиоуправляемых автомобилей, самолётов и вертолётов.
- Дальность/Макс. воздушный радиус действия (измеряется в футах или метрах) RC-системы — практически никогда не предоставляются производителями, поскольку на этот параметр влияют множество факторов, таких как помехи, температура, влажность, заряд батареи и другие.
- Некоторые RC-системы имеют приёмник, который также имеет встроенный передатчик для передачи данных от датчика (например, GPS-координат), которые в последствии будут отображаться на ЖК-дисплее RC передатчика.

Bluetooth
Bluetooth и более поздние продукты BLE (Bluetooth Low Energy) изначально предназначались для передачи данных между устройствами без заморочек сопряжения или согласования частот. Некоторые имеющиеся на рынке контроллеры полёта могут отправлять и получать данные по беспроводной связи через соединение Bluetooth, что упрощает поиск неисправностей в полевых условиях.
Wi-Fi
Управление по Wi-Fi обычно достигается посредством Wi-Fi роутера, компьютера (в том числе ноутбук, десктоп, планшет) или смартфон. Wi-Fi в состоянии справится как с передачей данных, так и с передачей видеопотока, но одновременно с этим эту технологию сложнее настроить/реализовать. Как и для всех Wi-Fi устройств, расстояние удаления ограничено Wi-Fi передатчиком.
Смартфон
Хоть это и не тип связи, самого вопроса, как управлять дроном используя смартфон, достаточно, чтобы уделить ему отдельный раздел. Современные смартфоны это по сути мощные компьютеры, которые по случайному совпадению могут также совершать телефонные звонки. Почти все смартфоны имеют встроенный модуль Bluetooth, а также модуль WiFi, каждый из которых используется для управления дроном и/или получения данных и/или видео.

Инфракрасное излучение (Infrared (IR))
Инфракрасная связь (то что можно найти в каждом телевизионном пульте дистанционного управления) редко используется для управления дронами, так как даже в обычных комнатах (не говоря уже об открытом пространстве) присутствует так много инфракрасных помех, что они не очень надёжны. Несмотря на то, что технологию можно использовать для управления БПЛА, не может быть предложена как основной вариант.
Дополнительные соображения
Функциональность: Производители полётных контроллеров, обычно, стараются предоставить как можно больше функций — либо включены по умолчанию, либо приобретаются отдельно в качестве опций/дополнений. Ниже приведены лишь некоторые из множества дополнительных функций, на которые вы, возможно, захотите взглянуть при сравнении контроллеров полёта.
Демпфирование: даже небольшие вибрации в раме, обычно вызываемые несбалансированными несущими винтами и/или моторами, могут быть выявлены встроенным акселерометром, который, в свою очередь, отправит соответствующие сигналы на главный процессор, который предпримет корректирующие действия. Эти незначительные исправления не нужны или не желательны для стабильного полёта, и лучше всего, чтобы контроллер полёта вибрировал как можно меньше. По этой причине между контроллером полёта и рамой часто используются виброгасители/демпферы.
Корпус: защитный корпус вокруг контроллера полёта может помочь в различных ситуациях. Помимо того, что корпус выглядит более эстетично, чем голая печатная плата, корпус часто обеспечивает некоторый уровень защиты элект. элементов, а также дополнительную защиту в случае краша.
- Четыре отверстия на расстоянии 30.5мм или 45мм друг от друга в квадрате.
- Плоская нижняя часть для использования с наклейкой.
- Четыре отверстия в прямоугольнике (стандарт не установлен).
Сообщество: поскольку вы создаете кастомный дрон, участие в онлайн-сообществе может значительно помочь, особенно, если вы столкнулись с проблемами или хотите получить совет. Получение рекомендаций от сообщества или просмотр отзывов пользователей, касательно качества и простоты использования различных контроллеров полёта, может также быть полезным.
Аксессуары: Для полноценного использования продукта, помимо самого контроллера полёта, могут потребоваться сопутствующие элементы (аксессуары или опции). Такие аксессуары могут включать, но не ограничиваются ими: модуль GPS и/или GPS антенна; кабели; монтажные принадлежности; экран (LCD/OLED);
Пример
Итак, учитывая все эти различные сравнительные характеристики, какую информацию вы можете получить о контроллере полёта и что может включать контроллер полета? В качестве примера мы выбрали Quadrino Nano Flight Controller.
Главный процессор
Сенсоры

Quadrino Nano включает микросхему MPU9150 IMU, которая включает в себя 3-осевой гироскоп, 3-осевой акселерометр и 3-осевой магнитометр. Это помогает сделать плату достаточно маленькой, не жертвуя качеством датчика. Барометр MS5611 предоставляет данные о давлении и покрыт кусочком пены. Интегрированный Venus 838FLPx GPS с внешней GPS антенной (в комплекте).
Программное обеспечение

Quadrino Nano был создан специально для использования новейшего программного обеспечения MultiWii (на базе Arduino). Вместо того, чтобы изменять код Arduino напрямую, было создано отдельное, более графическое программное обеспечение.
Сборка квадрокоптера и его настройка своими руками из китайских комплектующих.

Квадрокоптер с бесколлекторными моторами , на 250 мм раме , с FPV камерой (курсовая). С задатками гоночного квадрокоптера - долголета. Собранный своими руками.
Характеристики
Квадрокоптер
рама до 250 мм
Тип управления
радиоканал, пульт управления в комплект не входит
Дальность управления
от 500 м (радиоканал)
Камера
Вид от первого лица (FPV)
Питание
Аккумулятор
3S-4S Lipo
Максимальное время полета
7-30 мин
Всем доброго дня. Загорелся собрать квадрокоптер максимально эффективный. Что бы быстро летал , мог поднять пишущую камеру типа GOPRO и мог долго оставаться в воздухе.Нашел в интернете мног видео по сборке с сылками на комплектующие , так же видео по настройке таких аппаратов. Но при сборке постоянно сталкивался с мелкими проблемами , которые были по сути пустяковыми и опытные блогеры просто упаскали их из виду , но меня они ставили в тупик.Так как опыта у меня никого нет.Вот и решился создать тему по сборке квадрокоптера из китайских комплектующих , что бы было с кем посоветоваться и сложить накопленную полезную информацию аккуратненько по порядку в шапку темы.
Сразу же скажу у меня уже есть квадрокоптер SYMA X8HC она меня не устроила :
1 мало грузоподъемности.
2 при потери связи сразу падает
3 вялое управление
4 нет FPV камеры ,есть конечно другая версия с камерой передающая по wi-fi НО дальность у нее оставляет желать лучшего( исправляется конечно , установив миниатюрную китайскую камеру с передатчиком)
5 камеру типа gopro с подвесом не поставить , а если и установить то время полета с 7 минут упадет гдето в два раза а про динамику полета и говорить нечего.
Начинал с выбора радиоаппаратуры. Искал чтонибудь дальнобойное и побольше каналов для управления, выбор пал на Радиолинк AT9S R9DS , стоит досихпор дороговато 5834,57 руб.
сам брал у другого продавца ,
Брал её как подарок себе на день рожденья (все таки 6 т.р. как то жалко , деньги не малые , нужно было какое нибудь оправдание для траты такой суммы , а день варенье всё таки раз в году , чем не повод?) . Расчет был такой что приемник можно будет перестовлять на другие сборки , так как аппаратура имеет память под разные преднастройки для управления(лодки , машины , самолеты) и летать планировал не только на квадрокоптере но и на моделях самолётов.Вложился , взял более качественную на мой взгляд аппаратуру , соответственно и дорогую.В начале расматривал в два раза дешевле аппаратуру FlySky FS-i6X .
FS-i6 Технические характеристики:
Каналы: 6 Каналы
Тип модели: планер/Heli/Airplane
Диапазон RF: 2.40-2.48 ГГц
Ban dШирина: 500 кГц
Ray-Ban d: 142
Мощность RF: менее 20dBm
2.4 ГГц система: AFHDS 2A и AFHDS
Код Тип: GFSK
Чувствительность: 1024
Низкое напряжение Предупреждение: менее 4.2 В
Порт DSC: PS2; Выход: ppm
Зарядное устройство Порты и разъёмы: нет
Длина муравья: 26 мм * 2 (двойная антенна)
Вес передатчика: 392 г
Вес упаковки: 676 г
Размер передатчика: 174x89x190 мм
Размер упаковки: 23.5 х 21.2 х 10.6 см.
Мощность: 6 В 1.5аа * 4
Режим дисплея: трансфлективный stn Positive type, 128*64 Dot Matrix va73 * 39 мм, белая подсветка.
Обновление в строке: Да
Цвет: черный
Сертификат: ce0678, fcc
Модель воспоминания: 20
Диапазон управления: 500 м
Но смутила дальность работы аппаратуры.
Потом я наткнулся на видеоролики где на радиоаппаратуру устанавливали усилители и добивались дальности до 10 километров.
Вот характеристики Радиолинк AT9S R9DS
Начал просматривать ролики в Youtube по сборке различных квадрокоптеров, откуда вынес следующее что их можно разделить на:
гоночные - где важна скорость.(Организуют гонки между собой)
И на долголеты - здесь не важна скорость главное гузоподъемность и время полета. (С которых делают какие нибудь качественные видео красивой местности или кто то даже свадьбы снимать пробует)
Хотелось бы конечно все и сразу.
Наткнулся на сборку чего то среднего , рама у него как угоночного квадрокоптера 250 мм (если я правильно понял то гоночные это как раз до 250 мм) , а вот моторы автор видео поставил на 1500 оборотов на один вольт(1500kv) т. е. при подключении аккумулятора 3S (11.1 вольта) этот двигатель расчетно развивает примерно 16000 оборотов в минуту.Это конечно не самые оборотистые двигатели есть и 2300kv и 2600kv , но эта скорость двигателей более энерго эфективна. В плане коптер и не вялый - может быстро взлетать и сравнительно дольше может летать исходя из видеоролика до 22 минут , примерно как дорогие квадрокоптеры которые стоят от 45 000 рублей. Вобщем что то между гоночным и долголетом.
Решил на движках не экономить ибо от энергоэфективности движков и зависит как квадрокоптер будет вести себя в полете и сколько он сможет пролетететь по времени и по дальности на одной зарядке , взял 4 шт. Garila X2507 1500KV . Не плохие движки но дороговаты и ГЛАВНЫЙ минус они продаются только комплектом т. е. при выходе из строя одного движка не получится докупить один дв. , что сильно огорчяет.
Конечно есть аналогичные двигатели типа Cobra CPL2207 Green 1500KV они дешевле и продаются по одному но на этих моторы квад летает вяленько.
DYS - это производитель
XT - скорее всего модель у этого производителя , точно не знаю.Кто знает пусть поправят.
Дльше самое важное для нас:
50 - это обозначает размер пропов 5 дюймов.
45 - это обозначает угол на который лопости откланены относительно оси вращения 45 градусов. Чем болше угол тем больше воздуха буде загребать мотор, тем сильнее он будет тянуть. Ток тоже выростет.Но больше не всегда лучше , надо искать золотую середину.
X3 - это количество лопостей . Указывается лишь тогда , когда лопостей более двух.
Расмотрим верхню строчку в левой верхней колонке с нашим пропеллером из примера DYS XT5045x3(PROP1) :
Первая цифра 500 Thrust(g) - это тяга двигателя указывается в граммах в данный момент(500 грамм)
Вторая цифра 5.7 Load(A) - это ток который потребляет двигатель в данный момент (5.7 ампер)
Третья цифра 23.9 Vohs(V) - это напряжение подаваемое на двигатель в данный момент(23.9 вольт)
Четвертая цифра 136 Power(W) - это мощность потребляемая двигателем в данный момент(136 ватт)
Пятая цифра 3.7 eff (g/w) - это эфективность , отношение веса к мощности или отношение затраченной энергиии к поднятому весу.
При тяге 500 грамм с напряжением поданым на двигатель 23.9 вольт(это батарея 6s, тоесть 6 банок по 3.7 вольта) , двигатель потребяет 5.7 ампер
При тяге 1617 грамм (это максимальная тяга)с напряжением поданым на двигатель 23.7 вольт(6S) , двигатель потребяет 27.2 ампер
Тоесть при использовании этих пропов с аккумулятором (6S) нам нужны регуляторы оборотов способные пропустить через себя 30 ампер.
Можно использовать для пропеллеров типа DYS XT5045x3(PROP1) регуляторы тип racerstar RS30A Lite 30A Blheli_S расчитаные на 30 ампер.
Для нашего двигателя с пропеллерами 6045 (6 дюймов) с двигателями 1500KV(1500 оборотов на один вольт) и аккумулятором 4S ( 14.8 Вольт) подойдут racerstar RS30A Lite 30A регуляторы на 30 ампер .


Хочу на свой вертолет поставить камеру с передатчиком и к ним очки vr
Может что посоветуете. Вертолет немаленький, правда забросил я его
Сначало напишите название и модель вертолета.
Подозреваю что на него сложно чтонибудь поставить.
Есть конечно камеры сразу же с видеопередатчиком и весят всего 5 грамм , например Eachine TX02 Super Mini .
Производитель: Eachine
Характеристики :

Ну и конечно же для нормального полёта квадрокоптера нам нужен мозг (полётный контроллер).
Здесь тоже есть из чего выбирать.
Есть разные режимы полёта :
В режиме стабилизации(STAB) - при отпускании стиков управления в полете квадрокоптер сам выравнивается относительно горизонта и удерживает высоту.
В режиме (ACRO) - нет ни какой стабилизации , вы самостоятельно регулируете высоту и самое главное отклонив коптер относительно горизонта и отпустив стики упавления коптер останица в томже наклоне.
Последний режим может показаться неудобным или неправильным и в конце концов опасным для коптера(в этом режиме ещё проще разбить коптер) , но поверте только в таком режиме вы ощутите полный свободный полет и получите класное видео снятое вашим дроном. Перед полетом в ACRO режиме настоятельно рекомендуют полетать в симуляторе с вашей аппаратурой управления , пока не научитесь не разбивать виртуальный дрон.Так как разбить настоящий это очень неприятно и дорого.
Опыта полета у меня никакой поэтому я взял полетный контроллер с баро-датчиком Betaflight F4 Pro (V2) , позволяет не дергать стик газа для поддержания нужной высоты полёта. Но как показала практика при включении baro в полете коптер начинает прыгать в воздухе (в диопазоне 20 см) . Я пока не победил данный глюк.Может кто-нибудь подскажет. Буду рад.
Самый главный плюс этого контроллера , это наличие встроенного OSD.
OSD
OSD - это устройство позволяющее полученные данные от датчиков полетного контроллера накладывать на видео в режиме реального времени.Что очень удобно видя уровень заряда аккумулятора вовремя посадить коптер или орентируясь по датчику тока подобрать экономичный режим полета.
Теперь можно приступать к сборке.
Сбираем раму (зарание на КАЖДЫЙ лучи которые будут крепиться моторы можно одеть термоусадочную трубку для крепления регуляторов оборотов)
Выглядить будет примерно так:

Но неустанавливайте пока верхню крышку рамы и стойки , они помешают в дальнейшей сборке.
После сборки нижней части рамы установите на неё моторы(проводами вдоль луча к плате ;) ).ВНИМАНИЕ болты идущие в комплекте могут не подходить по длине. У меня они оказались короткие(6мм) , цепляли двигатель буквально на два витка. Что крайне не надежно. Нашел на 8 мм в самый раз . ВНИМАНИЕ слишком длинные болты могут у переться в обмотку двигателя и повредить её , будте крайне внимательны.
Сделал недавно площадку для аккумулятора, с виду неказистая , но входе эксплуатации часто меня выручяла. При жосткой посадке хорошо амортизирует. Прикрепляю фото:

ВопросыКвадрокоптеры
Для того чтобы собрать квадрокоптер с камерой своими руками, нужно разделить сборку на два этапа. Первый этап это сборка самого квадрокоптера. Второй – подключение к нему камеры.
Итак, первый этап.
Рецепт сборки квадрокоптера своими руками
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Рама для квадрокоптера своими руками
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;

рама для квадрокоптера с камерой своими руками
Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей. Чтобы их прикрутить (двигатели), можно использовать крепления, те что используют для крепления труб к стенам при проводке проводов.
Квадрокоптер с камерой своими руками: видео процесса сборки
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
квадрокоптер с камерой своими руками рама для квадрокоптера с камерой своими руками
Как подключить электронику всего квадрокоптера
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
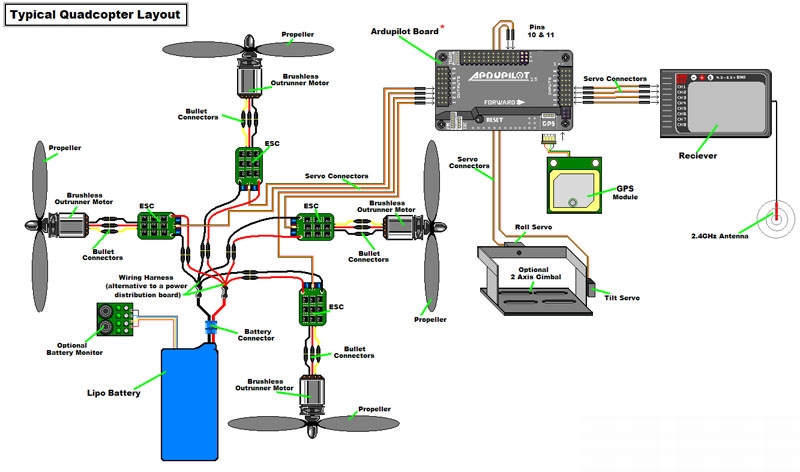
инструкиция подключения квадрокоптера eng
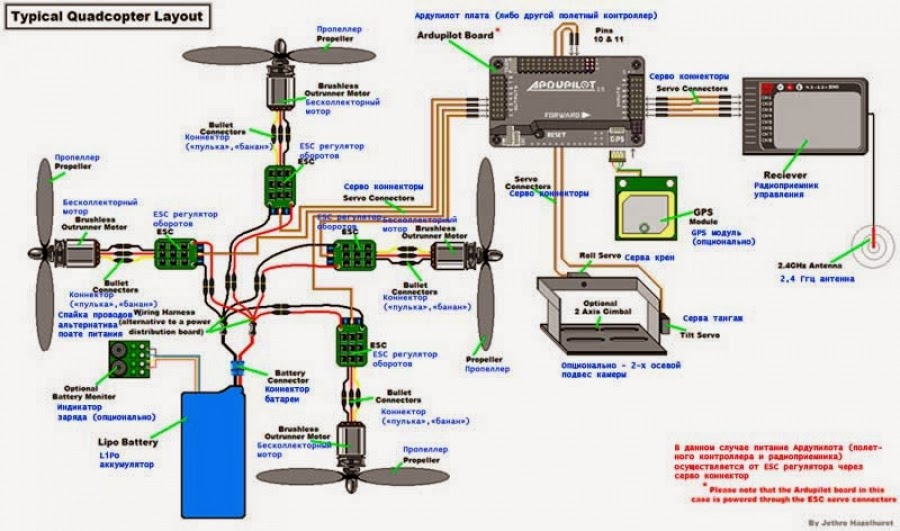
инструкция подключения квадрокоптера rus
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Настроить и “обучить” квадрокоптер с помощью ПО
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
Читайте также: