
Пьезоактюатор своими руками
Добавил пользователь Владимир З. Обновлено: 19.09.2024
Для получения заведомо более высоких, чем в электромагнитах, быстродействия и величин перестановочных сил в двигателестроении начинают применять пьезоэлектрические преобразователи, или пьезоприводы (пьезоактюа- торы), на основе обратного пьезоэлектрического эффекта, для краткости далее именуемого пьезоэффектом — изменение размеров диэлектриков в электрическом поле. Они преобразуют электрическую энергию в механическую.
Основу большинства современных пьезоэлектрических материалов составляют твердые растворы титаната-цирконата свинца, модифицированные различными компонентами и добавками. В России чаще используются керамические пьезоэлектрические материалы, полученные из смеси различных окислов и солей.
Пьезоэлектрические материалы отличаются:
Основным преимуществом пьезоэлектрических преобразователей является их чрезвычайно высокое быстродействие. В ультразвуковой технике применяются пьезоэлектрические преобразователи при частотах порядка 200 кГц. Также важное преимущество пьезоактюаторов — высокая экономичность, т. е. малое потребление электрической энергии (только при перемещении). На рис. 2.8 представлены напряжения управляющих импульсов и создаваемые ими токи для одинаковых по назначению (управление впрыскиванием топлива) электромагнитного и пьезоэлектрического приводов.
Управление текущими значениями тока в электромагнитном приводе выполняется импульсной модуляцией. Очевидно отсутствие тока в сработавшем пьезоактюаторе, тогда как для электромагнита удерживающий ток необходим.

Обратный пьезоэлектрический эффект в общем случае описывается следующим уравнением:
где 5Л. — деформация со значениями /г от 1 до 6; 8 — постоянная гибкости; Тп — упругое напряжение со значениями Л от 1 до 6; (1,^ — пьезоэлектрический модуль; Е1 — напряженность электрического поля со значениями у от 1 до 3.
Первое слагаемое уравнения показывает, что механическая деформация, возникающая под действием электрического поля, вызывает за счет прямо-

Сравнительные характеристики управляющих импульсов электромагнитного (а) и пьезоэлектрического (б) приводов:
и — напряжение управляющего импульса; / — ток, протекающий в преобразователе.
го пьезоэлектрического эффекта появление на поверхности кристалла про- тивонапряжения.
Противонапряжение может создаваться и механической деформацией вследствие приводимой пьезоактюатором нагрузки. Напряжение электрического управляющего импульса формирует напряжение на пьезоактюаторе по мере заряда конденсатора, образуемого электродами и диэлектриком пье- зоактюатора. В первом приближении это апериодический процесс с постоянной времени, определяемой емкостью конденсатора и сопротивлением цепи заряда.
Суммарное противонапряжение уменьшает действие напряжения, приложенного извне, созданного электрическим управляющим импульсом. Поэтому напряженность электрического поля в материале пьезоактюато- ра определяется изменяющейся во времени разностью напряжения электрического управляющего импульса и противонапряжений. Деформации пьезо- актюатора — не мгновенно и не линейно — воспроизводят приложенное к нему напряжение.
Существует некоторое предельно достижимое значение деформации. Для каждого материала экспериментально можно установить предельное значение напряженности электрического поля.

При напряженностях поля, далеких от предельных, можно пользоваться более простой формулой
где АI — абсолютное удлинение образца; и — приложенное к образцу напряжение; с133 — пьезоэлектрический модуль.
Из (2.2) видно, что в рабочем диапазоне изменение длины пьезоэлемента пропорционально напряжению.
Кроме того, пьезоэлементы поляризованы (направление изменения длины зависит от знака приложенного напряжения) и совмещают возможности выполнения как тянущего, так и толкающего привода.
Преимуществом пьезоприводов также является совмещение перестановочных и упругих сил в одном элементе.
Что касается производительности, пьезопривод фирмы Siemens для элек- трогидравлических форсунок развивает силу 6300 Н, аналогичный отечественный — 1000 Н.
Пьезоактюаторы масло-, бензо- и термостойки, прочны и герметичны. Однако имеют и некоторые недостатки, вызывающие необходимость усложнения конструкций исполнительных механизмов, выполненных на пьезоак- тюаторах. Так, относительная величина пьезоэлектрических деформаций для наилучших из ныне известных материалов составляет порядка 0,001 при напряженности электрического поля порядка 100 кВ/м.
Кроме того, температурные деформации пьезокерамики соизмеримы с пьезоэлектрическими. Коэффициент температурного расширения отечественной пьезокерамики на основе титаната-цирконата свинца — порядка 2,5 10~ 3 1/град. Устранение влияния температурных деформаций пьезоак- тюаторов проще всего достигается выполнением их корпусных деталей из материалов с близкими к пьезокерамике коэффициентами температурного расширения.
Первые в России попытки использования пьезоэффекта в электронном управлении двигателей были предприняты в 1972 г. с материалами, имевшими на два порядка меньшие относительные пьезоэлектрические деформации. Но результаты начатых разработок и исследований позволили при появлении указанных современных материалов создать схемы и конструкции исполнительных механизмов с пьезоактюаторами, оптимальные по сочетанию эффективности, надежности и габаритов для практического применения на двигателях.
Пьезоэлектрические преобразователи могут быть использованы прежде всего в топливных системах двигателей — в насосах, управляющих клапанах

1 — пьезоэлектрический материал; 2 — металлические обкладки; а — единичный пьезоэлемент; б — собранный в столбик ньезоэлемен г; А — перестановочная сила.
и непосредственно в форсунках. С 2002 г. фирмы Siemens и Bosch производят дизельные электрогидравлические форсунки с пьезоактюаторами.
Структура простейшего единичного пьезоэлемента показана на рис. 2.9а.
Обычно единичные пьезоэлементы имеют форму пластин. При подаче на них электрического напряжения в пьезоэлектрике создается электрическое поле. Чтобы управляющее напряжение, создающее необходимую для имеющихся пьезоэлектрических материалов напряженность поля, не превышало 400-600 В, толщина единичного пьезоэлемента должна быть не более
0,3 мм. Очевидно, что абсолютное изменение толщины такого элемента ничтожно мало. Для получения необходимого перемещения приходится набирать столбики из единичных пьезоэлементов, как показано на рис. 2.96. Металлические прокладки между слоями пьезоэлектрика параллельно соединяются, чередуясь через одну в две группы, на которые подается управляющий электрический импульс. Поэтому в каждом единичном пьезоэлементе создается поле необходимой напряженности, но чередующейся направленности. Соответственно для согласования изменения толщины единичных пьезоэлементов в пакете чередуются элементы разных знаков направленности поляризации.
В упомянутом пьезоактюаторе фирмы Siemens имеется 280 единичных пьезоэлементов. Они и составляют активную суммарную длину пьезоактюа- тора. В общую же длину входят и металлические прокладки между слоями пьезоэлектрика, и изоляционные прокладки на концах наборного пьезоэлемента. Общая длина пьезоактюатора фирмы Siemens — около 80 мм. При подаче напряжения он изменяет длину на 80 мкм за 0,1 мс.
В поперечном сечении пьезоактюаторы могут иметь форму прямоугольника, круга, кольца и любую другую, удобную для установки его в исполнительный механизм соответствующей системы двигателя.
Важнейшим преимуществом пьезоактюаторов при использовании их в топливных системах наряду с дозированием подачи топлива является возможность создания в его потоке ультразвуковых колебаний, которые обеспечивают очистку отверстий сопел и лучшее распыление.
В Университете г. Эссен (Германия) на серийном двигателе с искровым зажиганием, оборудованном системой впрыскивания топлива Кде^ошс, были проведены сравнительные экспериментальные исследования характеристик в штатном исполнении и с системой впрыскивания, в которой форсунки были заменены ультразвуковыми распылителями. Основной элемент такого распылителя — вибратор в виде относительно тонкого конического диска, приводимого пьезоактюатором и вибрирующего в вертикальном направлении с заданными частотой и амплитудой. На поверхность диска направляется топливо; распыляясь на мельчайшие капли, оно образует во впускном канале топливовоздушный туман. Установлено, что на номинальном режиме качество распыливания топлива форсункой и ультразвуковым вибратором одинаково. По мере снижения нагрузки двигателя распылива- ние форсункой ухудшается, а ультразвуковым вибратором — улучшается. В результате мощность двигателя повышается до 7% на наиболее частых эксплуатационных режимах. Долговечность ультразвукового распылителя оценивалась в 8 тыс. ч, что достаточно для двигателя легкового автомобиля.
Приведено описание пакетных пьезоактюаторов, формулы для расчета абсолютных и относительных деформаций пьезоактюаторов в первом и втором приближениях. Показан пример модификации машинных методов для более точного расчета анизотропных тел, а именно, пьезокерамики. Предложено решение трехкоординатного пьезоактюатора, а так же приведено описание его работы. Указаны недостатки пакетных пьезоактюаторов и методы их устранения.

1. Федотов К.Д. Взаимосвязь пьезоэлектрических и механических свойств материала [Текст] / К.Д. Федотов // Материалы НТК студентов, аспирантов и молодых специалистов МИЭМ НИУ ВШЭ. – М.: РИО МИЭМ 2013. – 316 с. (с. 233).
2. Федотов К.Д. Трехкоординатный пьезопривод для сканирующей туннельной микроскопии [Текст] / Е.Н. Ивашов, К.Д. Федотов // Фундаментальные проблемы радиоэлектронного приборостроения (INTERMATIC – 2012) : матер. XI Междунар. науч.-техн. конф., Москва, 3-7 дек. 2012 г. – М.: МИРЭА, 2012. – Ч. 3. – С. 165-168.
3. Бобцов А.А. Исполнительные устройства и системы для микроперемещений / А.А. Бобцов, В.И. Бойков, С.В. Быстров, В.В Григорьев // СПб.: ГУ ИТМО. – 2011. – 131 с.
4. Андриевский Р.А. Наноструктурные материалы – состояние разработок и применение // Перспективные материалы. – 2001. – № 6.
Развитие современных нанотехнологий во многом диктуется возможностями сканирующих технологий, позволяющих изучать наноструктуры на субатомном уровне с использованием туннельного эффекта. Для технологического обеспечения данного процесса используются пьезоактюаторы, собранные в общем случае из поочередно спеченных тонких металлических пленок и пьезоколец. Последние, благодаря обратному продольному пьезоэффекту, позволяют добиться точного позиционирования зонда в сканирующей зондовой микроскопии.
Проектирование пьезоактюаторов возможно с использованием достаточно точного математического аппарата. В первом приближении необходимо вычисление абсолютного удлинения отдельного пьезоэлемента. Взаимосвязь пьезоэлектрических и механических свойств материала [1] позволяет получить выражение для абсолютного удлинения:
где ε – диэлектрическая проницаемость пьезокерамики, ε0 – электрическая постоянная, E3 – напряженность электрического поля вдоль направления деформации пьезоактюатора, l – длина элемента пьезоактюатора, d33 – пьезомодуль для продольного пьезоэффекта, Yz – модуль Юнга для пьезокерамики вдоль направления деформации пьзоактюатора, U = E3l – напряжение между металлическими пластинами.
При подаче одинакового напряжения на одинаковые элементы пьезоактюатора, достаточно для вычисления абсолютного удлинения всей конструкции умножить найденное абсолютное удлинение одного элемента на количество элементов в конструкции.
Во втором приближении значения относительной продольной и поперечной деформаций можно определить по обобщенному закону Гука:
где εя, εr – относительные продольные и поперечные деформации, σ – напряжения, возникающие в материале, Yz и Yr – модули Юнга для пьезоматериала по высоте и по радиусу цилиндра, составленного из пьезоколец, соответственно, а μz и μr – коэффициенты Пуассона для пьезоматериала. К сожалению, на сегодняшний день механическим свойствам пьезокерамики уделяется меньше внимания, чем пьезоэлектрическим, следовательно, найти точные значения как модулей Юнга, так и коэффициентов Пуассона для различных пьезокерамик крайне сложно.
В общем случае необходимо учитывать анизотропную природу пьезокерамики и использовать для непосредственного расчета систему алгебраических уравнений.
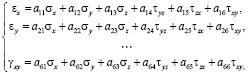
где σ – продольные напряжения, возникающие в материале, τ – касательные напряжения, возникающие в материале, a – упругие константы, зависящие от свойств материала. Данные расчеты можно реализовать с помощью машинных методов, в частности, модифицировать уже существующий метод конечных элементов.
Для расширения функционала пьезоактюаторов, при проектировании устройств туннельной микроскопии, необходимо увеличивать число степеней подвижности до трех и более. Примером подобного устройства может послужить следующий трехкоординатный пьезоактюатор [2].
аб
Виды трехкоординатного пьезоактюатора в разрезе сбоку (а) и сверху (б)
Трехкоординатный пьезоактюатор (рисунок а, б) содержит набор пьезотрубок 1, 2, 3, 4, 5 с электродами 6, 7, 8, 9, 10 и параллельными торцами 11, 12, 13, 14, 15,16, 17, 18, причем пьезотрубки связаны между собой посредством соединительных элементов 19, 20, 21, 22, 23, последний из которых связан с неподвижным основанием 24, а первый с зондом 25.
Трехкоординатный пьезоактюатор работает следующим образом.
При подаче напряжения на электрод 6, происходит механическая деформация пьезотрубки 1, вызванная явлением обратного пьезоэффекта. При этом зонд перемещается вдоль оси Z. При подаче напряжения на электроды 7, 8, происходит механическая деформация пьезотрубок 2, 3. При этом зонд перемещается вдоль оси X. При подаче напряжения на электроды 9, 10, происходит механическая деформация пьезотрубок 4, 5. При этом зонд перемещается вдоль оси Y.
Введение в устройство пьезоактюатора пьезотрубок, оси которых находятся в перпендикулярных плоскостях и скрещиваются, позволяет создать устройство, имеющее три степени свободы.
Следует также отметить, что использование вышеупомянутых многослойных пьезоактюаторов (в отличие от обыкновенных, отдельных пьезотрубок), позволяет увеличить диапазон получаемых перемещений при меньших напряжениях, но в то же время такая конструкция имеет некоторые недостатки, например, высокую электрическую емкость, обусловленную соединением большого количества конденсаторов из слоев керамики (диэлектрик) и металлических пластин (обкладки конденсатора). По этой причине пакетные пьезоактюаторы обладают меньшим быстродействием. Для увеличения быстродействия необходимо уменьшить амплитуду управляющего сигнала, уменьшить деформирующие усилия.
На сегодняшний день существует множество пьезокерамик, выпускаемых и отечественными, и зарубежными производителями. Для примера приведем таблицу, в которой указаны отечественные пьезоматериалы и их свойства [3].
Таким образом, современный технический опыт и научные результаты могут существенно ускорить и облегчить внедрение пьезоактюаторов в нанотехнологии. Впоследствии это может обеспечить упрощение исследований на молекулярном уровне, совершить новый технологический прорыв в этой области.


Такие пьезоэлектрические компоненты, как преобразователи DuraAct, преобразуют электрическую энергию в механическую и наоборот. Они могут применяться в качестве высокоточных гибких актюаторов, сенсоров с высокими динамическими характеристиками или источников энергии.
Даже в приложениях с высокими динамическими характеристиками прочная конструкция обеспечивает надежность, высокую устойчивость к повреждениям и наработку на отказ более 10 9 циклов. Скорость износа и частота отказов малы, так как твердотельные актюаторы не имеют движущихся частей.
Миниатюрные электрические генераторы для автономных систем
Заказные варианты исполнения для любых применений
При помощи технологии DuraAct достигается высокая гибкость конструкции актюатора. Это означает, что преобразователи DuraAct также отлично подходят для исследовательских целей и построения прототипов. В дополнение к набору стандартных исполнений возможно изготовление структур произвольной формы для удовлетворения различных требований к геометрии, гибкости, жесткости или рабочей температуре.

Пьезоэлектрические преобразователи могут быть спроектированы под конкретную задачу, в том числе и в виде массива нескольких керамических элементов. Такие индивидуальные изделия могут выпускаться весьма эффективно даже маленькими партиями.
Адаптированная управляющая электроника
В зависимости от приложения, к электронике предъявляются различные требования. Для управления высокоточным позиционером с высокими динамическими характеристиками необходим малошумящий широкополосный усилитель. Активное демпфирование вибраций требует наличия быстрого сервопривода с полосой пропускания, достаточной для компенсации жесткой связи между развиваемым усилием и массой конструкции.
- Высокая устойчивость к повреждениям
- Выбор материала и геометрии
- Четко определенные механические и электрические параметры
- Малый период освоения производства
- Компактность
- Продолжительный срок службы
- Широкая полоса пропускания
- Индивидуальные решения
- Возможность применения на искривленных поверхностях
- Рентабельность
- Стабильное и проверенное качество
- Простота использования
- Работа в качестве актюатора, сенсора и источника питания
- Многослойный модуль, например, для комбинации актюатор-сенсор
- Высокая гибкость керамических элементов
Применение пьезопреобразователей: примеры
Режим сенсора (Рисунки 1а и 1б)
Режим актюатора (Рисунок 2)
Мониторинг целостности конструкций (Рисунок 3)
Целые области могут быть обследованы при помощи массива из нескольких модулей, прикрепленных к различным точкам поверхности. Также возможен режим активного мониторинга, где одна часть преобразователей используется в качестве актюаторов, а другая регистрирует генерируемые ими колебания. Дефекты в материале конструкции, такие как микротрещины, обнаруживаются посредством сравнения измеренных сигналов с сигналами, полученными от неповрежденной системы.
Адаптивные системы используют и сенсоры, и актюаторы
Адаптроника
Сбор энергии (Рисунок 4)
Принцип работы
Пьезоэффект используется в датчиках, а обратный пьезоэффект – в актюаторах.
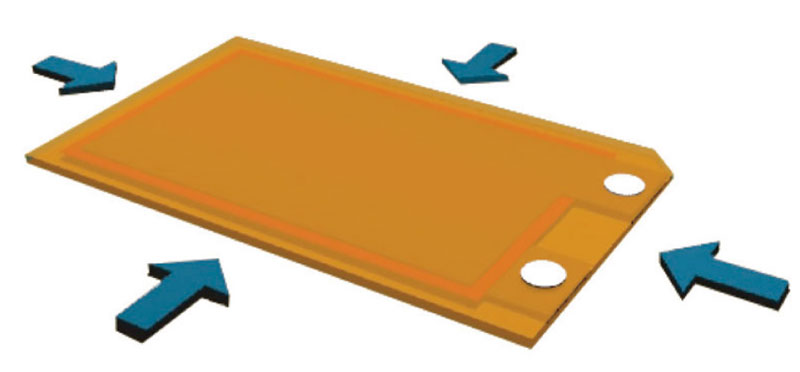 | |
| Рисунок 5. | Поперечное сжатие. |
| Рисунок 6. | Эффект d31. |
Время отклика пьезокерамики на изменение электрического поля или деформацию чрезвычайно мало. Вибрации в килогерцовом диапазоне могут и генерироваться, и регистрироваться. От типа и размеров керамики зависят требуемые напряжения возбуждения и степень сжатия. Зависимость между степенью сжатия и приложенным напряжением нелинейна. Кривая зависимости сжатия от напряжения с типичным гистерезисом показана на Рисунке 7.
| Рисунок 7. | Гистерезис пьезокерамики. |
Технология
Пьезопреобразователи DuraAct работают в качестве сенсоров с различными полосами пропускания, реагируя на такие механические воздействия, как ударная нагрузка, изгиб или давление, а также в качестве высокоточных позиционирующих или гибких актюаторов.
Стандартная конструкция представляет собой пьезокерамическую фольгу с металлизированными поверхностями для электрического контакта (Рисунок 8). Толщина фольги в стандартном варианте составляет 100 … 500 мкм, хотя возможны еще более тонкие слои. Без дальнейшей обработки такие пьезокерамические элементы хрупки и сложны в эксплуатации. Встраивание их в полимерную структуру обеспечивает электрическую изоляцию и механическую стабильность. В результате получается пластичный и чрезвычайно надежный модуль.
| Рисунок 8. | Принцип устройства преобразователя DuraAct. |
В варианте исполнения с несколькими слоями пьезокерамики при том же рабочем напряжении можно увеличить развиваемое усилие.
Пьезоэлектрические преобразователи DuraAct являются твердотельными актюаторами, и поэтому не имеют движущихся частей. Скорость износа и частота отказов малы. Электрический контакт обеспечивается пайкой, прижимом или приклеиванием проводников к двум контактным площадкам. Раздельное подключение нескольких слоев дает возможность разделить функциональности сенсора и актюатора, что позволяет использовать преобразователь и как сенсор, и как актюатор.
Рабочая характеристика
Актюаторы на основе пьезокерамических преобразователей характеризуются двумя параметрами: блокирующей силой FB и свободным смещением S0. Когда напряжение U приложено к свободному (не заблокированному) актюатору, он достигает своего максимального смещения S0. Сила, требуемая для полного предотвращения любых изменений длины, называется блокирующей силой FB (Рисунок 9).
| Рисунок 9. | Определение параметров. |
| Рисунок 10. | Приложение усилия пружины к актюатору. |
График зависимости смещения актюатора от приложенной силы называется характеристикой актюатора (Рисунок 11). Обычно она совпадает с линией, соединяющей описанные выше точки с нулевой блокирующей силой и нулевым перемещением. В большинстве случаев актюаторы противодействуют упругой структуре, например, при деформации пружины или металлической пластины (Рисунок 10). Если нагрузкой является пружина (график характеристики пружины) с жесткостью CF, результирующая рабочая точка будет находиться на пересечении ее нагрузочной линии с характеристикой актюатора (Рисунок 11). Наибольшая эффективность достигается в том случае, когда рабочая точка находиться посередине характеристики.
| Рисунок 11. | Характеристическая кривая с нагрузочной линией пружины. |
Параметры гибких актюаторов
| Рисунок 12. | Характеристики гибкого актюатора. |
| | |||
| Рисунок 13. | Свободное перемещение гибких актюаторов. | Рисунок 14. | Блокирующая сила гибкого актюатора. |
Требования к питанию
Для определения электрической мощности, требуемой для нормальной работы актюатора, должна быть известна его электрическая емкость. Типовая емкость преобразователей DuraAct имеет порядок нанофарад и приводится в технических описаниях. Емкость C зависит от типа пьезокерамики, ее толщины и площади. Для оценки средней электрической мощности Pm необходимо знать диапазон рабочих напряжений и частоту возбуждения.
Такие пьезоэлектрические компоненты, как преобразователи DuraAct, преобразуют электрическую энергию в механическую и наоборот. Они могут применяться в качестве высокоточных гибких актюаторов, сенсоров с высокими динамическими характеристиками или источников энергии.
Даже в приложениях с высокими динамическими характеристиками прочная конструкция обеспечивает надежность, высокую устойчивость к повреждениям и наработку на отказ более 10 9 циклов. Скорость износа и частота отказов малы, так как твердотельные актюаторы не имеют движущихся частей.
Миниатюрные электрические генераторы для автономных систем
Заказные варианты исполнения для любых применений
При помощи технологии DuraAct достигается высокая гибкость конструкции актюатора. Это означает, что преобразователи DuraAct также отлично подходят для исследовательских целей и построения прототипов. В дополнение к набору стандартных исполнений возможно изготовление структур произвольной формы для удовлетворения различных требований к геометрии, гибкости, жесткости или рабочей температуре.
Пьезоэлектрические преобразователи могут быть спроектированы под конкретную задачу, в том числе и в виде массива нескольких керамических элементов. Такие индивидуальные изделия могут выпускаться весьма эффективно даже маленькими партиями.
Адаптированная управляющая электроника
В зависимости от приложения, к электронике предъявляются различные требования. Для управления высокоточным позиционером с высокими динамическими характеристиками необходим малошумящий широкополосный усилитель. Активное демпфирование вибраций требует наличия быстрого сервопривода с полосой пропускания, достаточной для компенсации жесткой связи между развиваемым усилием и массой конструкции.
- Высокая устойчивость к повреждениям
- Выбор материала и геометрии
- Четко определенные механические и электрические параметры
- Малый период освоения производства
- Компактность
- Продолжительный срок службы
- Широкая полоса пропускания
- Индивидуальные решения
- Возможность применения на искривленных поверхностях
- Рентабельность
- Стабильное и проверенное качество
- Простота использования
- Работа в качестве актюатора, сенсора и источника питания
- Многослойный модуль, например, для комбинации актюатор-сенсор
- Высокая гибкость керамических элементов
Применение пьезопреобразователей: примеры
Режим сенсора (Рисунки 1а и 1б)
Режим актюатора (Рисунок 2)
Мониторинг целостности конструкций (Рисунок 3)
Целые области могут быть обследованы при помощи массива из нескольких модулей, прикрепленных к различным точкам поверхности. Также возможен режим активного мониторинга, где одна часть преобразователей используется в качестве актюаторов, а другая регистрирует генерируемые ими колебания. Дефекты в материале конструкции, такие как микротрещины, обнаруживаются посредством сравнения измеренных сигналов с сигналами, полученными от неповрежденной системы.
Адаптивные системы используют и сенсоры, и актюаторы
Адаптроника
Сбор энергии (Рисунок 4)
Принцип работы
Пьезоэффект используется в датчиках, а обратный пьезоэффект – в актюаторах.
| |
| Рисунок 5. | Поперечное сжатие. |
| Рисунок 6. | Эффект d31. |
Время отклика пьезокерамики на изменение электрического поля или деформацию чрезвычайно мало. Вибрации в килогерцовом диапазоне могут и генерироваться, и регистрироваться. От типа и размеров керамики зависят требуемые напряжения возбуждения и степень сжатия. Зависимость между степенью сжатия и приложенным напряжением нелинейна. Кривая зависимости сжатия от напряжения с типичным гистерезисом показана на Рисунке 7.
| Рисунок 7. | Гистерезис пьезокерамики. |
Технология
Пьезопреобразователи DuraAct работают в качестве сенсоров с различными полосами пропускания, реагируя на такие механические воздействия, как ударная нагрузка, изгиб или давление, а также в качестве высокоточных позиционирующих или гибких актюаторов.
Стандартная конструкция представляет собой пьезокерамическую фольгу с металлизированными поверхностями для электрического контакта (Рисунок 8). Толщина фольги в стандартном варианте составляет 100 … 500 мкм, хотя возможны еще более тонкие слои. Без дальнейшей обработки такие пьезокерамические элементы хрупки и сложны в эксплуатации. Встраивание их в полимерную структуру обеспечивает электрическую изоляцию и механическую стабильность. В результате получается пластичный и чрезвычайно надежный модуль.
| Рисунок 8. | Принцип устройства преобразователя DuraAct. |
В варианте исполнения с несколькими слоями пьезокерамики при том же рабочем напряжении можно увеличить развиваемое усилие.
Пьезоэлектрические преобразователи DuraAct являются твердотельными актюаторами, и поэтому не имеют движущихся частей. Скорость износа и частота отказов малы. Электрический контакт обеспечивается пайкой, прижимом или приклеиванием проводников к двум контактным площадкам. Раздельное подключение нескольких слоев дает возможность разделить функциональности сенсора и актюатора, что позволяет использовать преобразователь и как сенсор, и как актюатор.
Рабочая характеристика
Актюаторы на основе пьезокерамических преобразователей характеризуются двумя параметрами: блокирующей силой FB и свободным смещением S0. Когда напряжение U приложено к свободному (не заблокированному) актюатору, он достигает своего максимального смещения S0. Сила, требуемая для полного предотвращения любых изменений длины, называется блокирующей силой FB (Рисунок 9).
| Рисунок 9. | Определение параметров. |
| Рисунок 10. | Приложение усилия пружины к актюатору. |
График зависимости смещения актюатора от приложенной силы называется характеристикой актюатора (Рисунок 11). Обычно она совпадает с линией, соединяющей описанные выше точки с нулевой блокирующей силой и нулевым перемещением. В большинстве случаев актюаторы противодействуют упругой структуре, например, при деформации пружины или металлической пластины (Рисунок 10). Если нагрузкой является пружина (график характеристики пружины) с жесткостью CF, результирующая рабочая точка будет находиться на пересечении ее нагрузочной линии с характеристикой актюатора (Рисунок 11). Наибольшая эффективность достигается в том случае, когда рабочая точка находиться посередине характеристики.
| Рисунок 11. | Характеристическая кривая с нагрузочной линией пружины. |
Параметры гибких актюаторов
| Рисунок 12. | Характеристики гибкого актюатора. |
| | |||
| Рисунок 13. | Свободное перемещение гибких актюаторов. | Рисунок 14. | Блокирующая сила гибкого актюатора. |
Требования к питанию
Для определения электрической мощности, требуемой для нормальной работы актюатора, должна быть известна его электрическая емкость. Типовая емкость преобразователей DuraAct имеет порядок нанофарад и приводится в технических описаниях. Емкость C зависит от типа пьезокерамики, ее толщины и площади. Для оценки средней электрической мощности Pm необходимо знать диапазон рабочих напряжений и частоту возбуждения.
Читайте также: