
Нанороботы своими руками
Обновлено: 08.07.2024
Нанороботы — это научный прогресс, который относится к созданию новейших технологий. Эти микроскопические машины способны выполнять определённые действия, на которые они запрограммированы в процессе создания. Также, продумали создание нанороботов способных размножаться и назвали их репликаторами.
Но существует и иная противоречивая точка зрения, которая значительно сужает круг работы нанороботов. То – есть каждый экземпляр выполняет определённую цель. В основном суть таких устройств заключается в воздействии на молекулярном уровне.
Но это только планы, которые скоро претворятся в жизнь. А на данный момент неизвестно ни одного случая взаимодействия с нанороботами, так как точное время доработки проектов и создания наноробов удовлетворяющих требованиям пока не известно.
Радует и то, что прототипы данного устройства заняли лидирующее место в определённой сфере науки. Речь идёт о специальных датчиках, которые ведут учёт молекул в образцах, но и они не нашли столь широкого применения в наше время.
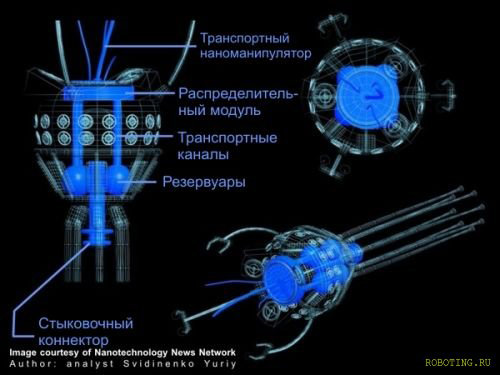
DNA box, обеспечивающий работу наномашин

В недалёком 2008 году команда учёных создала робот, которым можно управлять с помощью дезоксирибонуклеиновой кислоты. Этот робот собирается самостоятельно. Используя его возможности можно создавать компьютеры для работы с генами и выполнения логических операций. После, в 2010 году были созданы первые наномашины, которые работают на основе ДНК. То — есть, если DNA box работают на фрагментах ДНК, то тут ДНК полностью обеспечивают работу наномашин.
Типы устройств нанороботов
По типу нанороботы различаются способностью и неспособностью репликации. Даже некоторые учёные бьют тревогу, рассматривая способность машин к саморазмножению. Они считают, что этот тип может представить серьёзную опасность всему человечеству. Но это скорее зависит от интенсивности размножения. Да и сторонники саморазмножающихся машин гарантируют, что определённый момент размножения будет запрограммирован согласно среде производства. Поэтому делать выводы пока рано, тем более можно нарваться на двоякое спорное мнение по этому поводу.
Нанороботы в медицине

Большие надежды возлагают на машины, учёные – медики. Но и они отрицают производство нанороботов способных к репликации, так как это может привести к возможным ошибкам и недостоверной информации о состоянии здоровья больных. Выход – создание отдельных фабрик для производства нанороботов используемых в медицинской сфере.
Производство и разработка конструкций
3D печать используется для создания физических предметов, используя чертежи, или лазерную гравировку. Выглядит 3D печать, созданная с помощью чертежей, как полноценная трёхмерная модель. Но производить наноустройства таким способом можно при условии высокой точности современных принтеров, дабы не упустить, ни одну деталь. Поэтому гравировка с использованием лазера позволяет добиться более высокоточных результатов. А принтер, использующий этот способ, может даже создавать составляющие части машин.
Если говорить о двухфотонной литографии, то следует отметить, что тут не отвергается использование 3D принтеров. Просто печать производится путём лазерного луча, отправляющего на точку фотоны. Этот способ тоже хорош тем, что создаёт высокоточную конструкцию или часть конструкции. Какой использовать способ пока не определились, но все они изучаются очень тщательно.
Сферы применения наномашин
Если производители добьются своей цели и создадут нанороботы, то сфер применения их будет множество. Во-первых, как мы уже и говорили выше, медицина возлагает большие надежды на наномашины. Помимо контроля за состоянием здоровья больных, особенно в послеоперабельный период и страдающих сахарным диабетом, их планируют использовать для выявления и уничтожения раковых клеток, которые находятся в различных стадиях.
В военной отрасли, нанороботы могут быть инструментом для разведывательных операций и даже для устранения противников.
Видео:
Что такое каноничный наноробот? Это робот, обладающий несколькими важными характеристиками. Его размер не должен превышать 100-200 нанометров, он умеет перемещаться в пространстве, получать, обрабатывать и передавать информацию и исполнять программы. И самое важное — он должен уметь манипулировать веществом на молекулярном или атомном уровне.
Последний пункт крайне важен. Во-первых, обладая такой способностью, наномашина сможет реплицировать себя — создать свою точную копию. Такое своеобразное размножение. Во-вторых, наноробот сможет взаимодействовать с атомами, менять их и перестраивать, создавая из одного вещества совершенно другое. И это открывает потрясающие перспективы перед человечеством. Прежде чем мы перейдем к сути, скептикам стоит услышать небольшой экскурс в будущее. Иначе всё, что мы скажем, будет восприниматься не более чем фантастикой.
Дело в том, что динамика развития технологий, в частности, инженерных, компьютерных, микробиологии и генной инженерии позволяет более-менее верно предугадать наши возможности в недалеком будущем. Но наше сознание инертно, а прогресс человечества ускоряется. Возможно, мы настолько слепы, что даже недооцениваем будущее, которое ждет нас через 5, 15, 50 лет. Уже сейчас мы практически научились побеждать рак (и другие болезни), мы выращиваем органы и печатаем высокотехнологичные протезы на 3D-принтерах, мы уже редактируем человеческий геном и можем обеспечить едой всю планету, и уже сейчас мы создаем нанодвигатели и примитивных роботов размером с молекулу (почитай статьи за неделю в любом научно-популярном новостном журнале — удивишься, сколько всего происходит). Да и вообще, у нас под носом мириады микроорганизмов — по сути, нанороботы от природы. Посмотри, например, видео ниже, где показан синтез белка, — чем не робот?
Так что мозговыносящее будущее уже не за горами. Есть даже вероятность, что ты сможешь наслаждаться им бесконечно долго — обретя бессмертие благодаря технологиям. Или нанороботам, которые эти технологии смогут использовать. Теперь расскажем о том, что нам дают нанороботы, а потом поговорим о том, как и почему это может стать достоянием всего человечества.
Нанороботы рулят
Нанороботов достаточно запустить в наш организм, чтобы они смогли добраться до любого участка тела. До любого очага болезни. Например, до раковой опухоли, чтобы уничтожить ее. Разве не круто? Но давай взглянем чуть глубже — нанороботы могут изменить наше тело. Обновить его или вообще модифицировать. Хочешь больше мускулатуры? Пожалуйста! Идеальное зрение? Да хоть третий глаз! Новое сердце? Больше мозгов? Член в 49,5 см?
Каждый с рождения сможет обучаться чему угодно. Каждый сможет быть своеобразным Эйнштейном, гением. Мы станем богоподобными существами.
Разработки Hive, Hololens и Okulus Rift, Neurolink и рядом не стоят с тем, что могут дать нам нанороботы. Подумай, ведь это идеальный, масштабируемый и бесконечно гибкий нейроинтерфейс. Виртуальная реальность может стать для нас вторым домом, ведь нанороботы смогут вводить информацию в мозг напрямую, минуя провода. Это, конечно, опасно, ведь мозги можно будет хакнуть или манипулировать людьми, но давай не будем о плохом. Весь интернет в твоей голове, доступ ко всем знаниям мира — разве это не круто? Или интерактивные фильмы, игры c твоим непосредственным участием. Целые миры, какие только можно представить. А про дополненную реальность можно и вообще не упоминать — это практически само собой разумеющаяся возможность.
Заводы и производства будут не нужны. Зато будут нужны инженеры, ученые и светлые умы. Вообще, с наступлением эпохи нанороботов человечество лишится каких-либо ограничений и наука сделает просто невообразимый рывок вперед. Нанороботы — это катализатор, который выведет человечество на другой уровень эволюции. Мы сможем создавать любые мыслимые устройства, с любыми характеристиками и возможностями.
Если говорить о более приземленных вещах, то ничто тебе не помешает запилить за несколько минут новый iPhone (хотя кому он будет нужен, но для примера пойдет) или построить красивый дом, поменять планировку или дизайн квартиры. Хотя, скорее всего, понятие недвижимости в принципе исчезнет из нашего мира — твой дом будет там, где находишься ты.
Есть, правда, небольшая дилемма. Если нанороботы будут настолько круты, то люди смогут крафтить людей. То есть ты сможешь создать свою копию или запилить себе персональную Krystal Boyd. Или вырастить вагину на своей ладони. Тут, скорее, вопрос в том, будут ли нанороботы иметь ограничения на программном уровне, ведь может найтись сумасшедший хакер или просто псих, который уничтожит человечество. Безопасность — одна из самых больших проблем.
А вот работы и денег мы можем лишиться. И это еще одна из проблем. Тебе и вообще никому не нужно будет работать, чтобы обеспечить свое выживание. Деньги, как класс, тоже не будут нужны — всё, что можно купить, можно создать здесь и сейчас бесплатно. Вопрос: что будут делать люди, если у них будет всё? Наслаждаться жизнью? Творить? Заниматься наукой? Сложный вопрос, на который пока что ни у кого нет ответа. Остается лишь верить в разумность наших собратьев и просто в человечество. Ведь мы умеем находить выход из самых неприятных ситуаций.
Войны. Будут ли вестись войны? Если ресурсы станут безграничны и вседоступны, то нужно ли будет за них бороться? Про идеологические причины войн можно не рассуждать — наше сознание претерпит непрогнозируемые изменения вместе с изменением мира. Но предложить свое видение можешь в комментариях под статьей.
Нанороботы для всех
А теперь немного математики. В Brodude с ней неважно, ведь мы гуманитарии, но немного поднапрячь извилины было приятно. Да и для осознания масштабов достаточно школьной математики. Надеемся, что не ошиблись. Поехали.
Следовательно в одном кубометре может уместиться
(10^5)^3 = 10^15
или
1 000 000 000 000 000 штук.
Далее предположим, что процесс создания копии одним нанороботом занимает у него 1 час.
За 1 час — один робот.
За второй — 4 (ведь их уже двое).
За третий час — 8 нанороботов.
Обычная геометрическая прогрессия. Можем вывести формулу зависимости количества (count) от времени (t):
После 10 часов у нас уже будет 1024 наноробота.
После 24 часов -> 16 777 216.
Найдем время, нужное для создания 10^15 штук.
log(2)10^15 = 40 часов
Всего лишь 40 часов, КАРЛ, чтобы заполнить 1 кубометр пространства нанороботами.
Но нам нужно больше. Поэтому интереса ради посчитаем, сколько времени нужно, чтобы превратить Землю в шар из нанороботов.
T(X)= 2^(X-1), почти идентичная предыдущей. Объем Земли — 1.08 * 10^21. Упростим и посчитаем итоговое время:
log(2) 10^21 — 1 = 70X
70 * 40 = 2800 часов или 116 дней.
116 дней, чтобы превратить Землю в огромный шар из нанороботов (при заданных параметрах). А теперь представь, что наноробот будет тратить минуту, а не час, на создание своей копии. Тогда апокалипсис настанет через 46 часов.
Но так много нам их, конечно, не нужно. Если на человека нужен лишь кубометр, чтобы обеспечить 6 млрд людей, нужно 6 млрд м³ вещества. Это, по сути, куб со стороной 2000 метров. То есть очень мало. Сторона куба уместится в центре Краснодара. Так что каждого жителя Земли можно обеспечить личными нанороботами — это вообще не проблема.
Колонизация космоса
Идея в том, что человечеству достаточно одного наноробота. Всего лишь одного, чтобы изменить целый мир. Вопрос лишь в наличии вещества, из которого будут создаваться новые экземпляры. Родную планету пускать под это дело не очень хочется, но ведь у нас над головой бесконечное количество материи.
Но в космосе так много миров. Теоретически каждый сможет получить планету в подарок. Ты прикинь, своя планета. С которой можно делать всё, что угодно. Звучит нереально, но не забывай о прогрессе и возможностях нанороботов. Можешь назвать нас сумасшедшими, но многие ученые мужи уже сейчас заявляют, что колонизация ближайшей планеты, а затем и галактики — вопрос выживания человечества. А нанороботы — самый простой способ осуществить это.
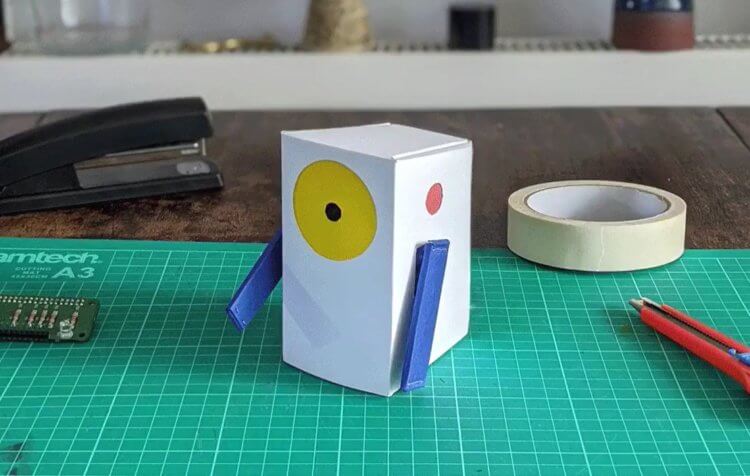
Робот ALTO, которого можно собрать самому
Робот с искусственным интеллектом своими руками
Интересный факт: ученые уверены, что в будущем большую часть ручного труда будут выполнять роботы. Чтобы не остаться без работы, людям необходимо уже сейчас изучать программирование, ведь роботами должен кто-то управлять. Так что знать, что такое машинное обучение и как оно работает, важно всем. И робот ALTO, возможно, сможет быстро ознакомить людей с этой темой.
Схема для создания корпуса робота из бумаги и исходный код программы для его работы можно найти на сайте Experiments with Google (кнопка Get the code). Но это еще не все, потому что для создания робота нужна электроника, которую нужно купить:
- Coral USB Accelerator — это устройство, которое включает в себя процессор Edge TPU. Он нужен для того, чтобы робот обладал способностью к машинному обучению. Его можно купить на Aliexpress;
- Raspberry Pi 4 — небольшой компьютер размером с банковскую карту. К нему можно будет подключить камеру, динамики и прочее оборудование, нужное для робота. Он тоже есть на Aliexpress.
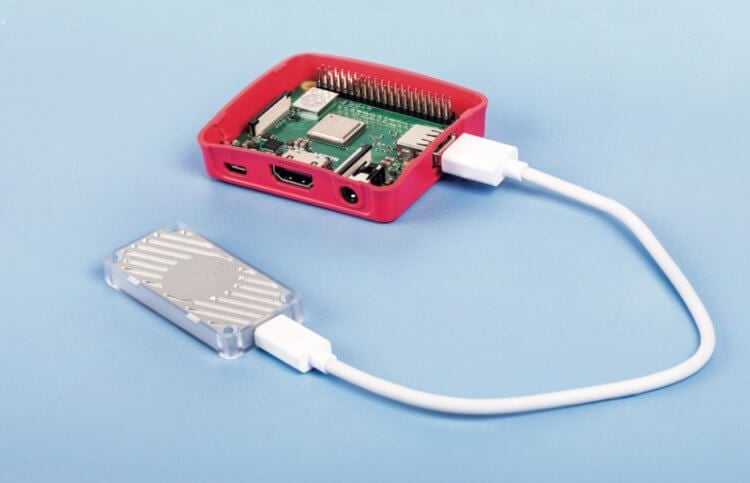
Coral USB Accelerator и Raspberry Pi 4
Знаете ли вы, что роботов можно создавать даже изо льда? Посмотреть на такого робота можно по этой ссылке.
Программирование робота
Для обучения робота нужно будет использовать платформу TensorFlow, которая включает в себя инструменты для тренировки нейронных сетей (можно сказать, для создания искусственного интеллекта). Звучит сложно, да и цена устройства Coral USB Accelerator и компьютера Raspberry Pi 4 может озадачить. Но ведь речь идет о достаточно серьезном устройстве, в ходе создания которого человек получает навыки, которые могут пригодиться ему в высокотехнологичном будущем. Знание английского тоже обязательно, потому что инструкция по сборке робота ALTO и его настройке выложены на GitHub и не переведены на русский.
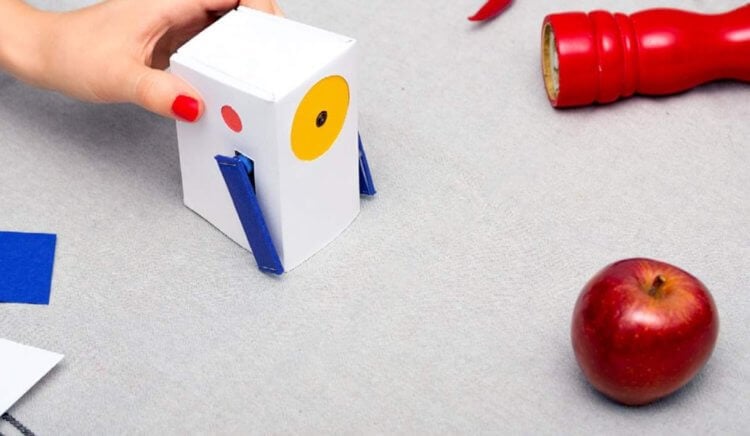
Робот ALTO может распознавать предметы и многое другое — главное, научить его этому
Представители Google считают, что робота можно научить выполнению самых разных задач. Самая простая из них — распознавание предметов. Если перед камерой робота поставить яблоко, он может поднять левую руку. А если поставить банан — правую. Это только самые банальные примеры, а на деле, полученные в ходе сборки робота знания, должны помочь в создании более навороченных устройств. Глядишь, кто-нибудь сможет даже разработать собственный робот-пылесос или создать охранную систему с распознаванием лиц.
Многие люди ассоциируют будущее именно с роботами. Считается, что когда-нибудь они смогут ходить по улицам наравне с людьми и это будет вполне привычным явлением. На данный момент на улицах можно встретить разве что роботов-курьеров, и то редко. Одного из самых интересных роботов для доставки посылок недавно представила компания Hyundai. Он стал очень обсуждаемым — в чем заключается его главная особенность, можно почитать в этом материале.
Роботы заменяют людей на производстве и в быту, трудятся в опасных условиях. Андроиды, напоминающие человека, работают, как правило, в качестве промоутеров, а промышленные машины настроены на точное выполнение функций. Их разработкой занимаются специалисты.
Домашних же мастеров интересует вопрос, как сделать робота из подручных средств. Оригинальные механизмы можно сконструировать самостоятельно и запрограммировать на реализацию несложных задач.

Робот, реагирующий на источник света
Для быстрого сбора механизмов используются предметы, которые можно найти дома. Это моторчики и батарейки из детских игрушек, проволока, солнечные аккумуляторы от старых калькуляторов, светодиоды. Дополнительно потребуются фиксаторы (клей, изолента), отвертка и другие инструменты из домашней мастерской.
Перед началом работы следует определить, какие функции возьмет на себя готовый механизм. За 15 минут можно собрать робота, который ищет источник света. При включении лампы он будет двигаться к ней, а при перемещении фонаря — следовать за потоком лучей.
Необходимые инструменты и детали
При сборке конструкции простого робота своими руками потребуются:
- основа – монтажная плата или плотный материал (картон);
- движущая сила – миниатюрные моторчики мощностью 3 или 5 В (из старой игрушки);
- колеса – крышки от пластиковых бутылок;
- датчики – фототранзисторы на 3 В;
- источник питания — 3 спаянные батарейки АА (пальчиковые);
- управляющие элементы – транзисторы 816Г (производство – Россия);
- монтажные приспособления – провода из витой пары.
Для проделывания отверстий на картоне потребуется шило, а фиксатором элементов послужит термопластичный клей (из термопистолета). Для работы также понадобится паяльник и жесткая проволока, которую заменит разогнутая скрепка.

Процесс сборки
Готовые детали следует разложить на рабочем столе и включить паяльник. Первоначально собирают плату, для чего подготавливают текстолитовую или картонную основу со сторонами от 4 до 5 см. На ней должна уместиться схема, батарейки, двигатели и крепеж переднего колеса.
Поодаль от переднего края фиксируют транзисторы, запаивая их так, чтобы маркировка располагалась на стороне правого колеса.
К 3 соединенным батарейкам подпаивают провода и определяют на плате 2 точки их схождения (плюс и минус). Удобно продеть в края платы витую пару, запаять концы к транзисторам и датчикам, вывести петлю и к ней подпаять батарейки.
Двигатели устанавливают в конце шасси с противоположной стороны платы. Управляющий моторчик крепят напротив управляемой системы. Это необходимо, чтобы робот поворачивался на свет.
Сборку электрики начинают от отрицательного полюса батарейки к положительному контакту по всей схеме. Взяв часть витой пары, припаивают отрицательный контакт датчиков к минусу батарей, и в это же место добавляют коллекторы транзисторов.

Второй фотоэлемент припаивают небольшим куском провода к транзисторной базе. Остальные ножки присоединяют к моторчикам. Для проверки правильности сборки используют тестер полярности напряжения.
После сборки проводят тестирование. Для этого включают схему и подносят ее к источнику света, поворачивая сначала одним, затем другим чувствительным элементом.
Когда все сделано правильно, двигатели на плате вращаются, меняя скорость в зависимости от степени освещения.
Если устройство не работает, проверяют правильность подключения контактов. В схеме каждый из датчиков отвечает за работу колес — правый за левое, и наоборот. Если это не так, корректируют полярность включения моторов.
Далее осуществляют сборку устройства. Первым делом изготавливают боковые колеса, склеив крышки между собой полой частью внутрь. Для их фиксации просверливают небольшые отверстия, используя миниатюрную дрель с насадками. В колесо продевают проволоку (бывшую скрепку) и закрепляют ее концы между фотодатчиками на плате.
На последнем этапе проверяют работу механизма, используя источники освещения разной интенсивности. Колеса робота должны ехать вперед. Если система работает, зафиксированные на плате моторчики и батарейки закрепляют термоклеем.
После приступают к изучению возможностей робота и расширению его функционала. Например, ставят задачу, чтобы он ездил по заданной траектории.
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:

Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Датчики устанавливают на передней части платы, подключая их с помощью проводов к основной схеме. По бокам от основы располагают гусеничный механизм.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.

Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Роботы для детей
Робототехника позволяет школьникам развивать творческие навыки и знакомить с техническими терминами. Освоив принципы конструирования lego-роботов (как правило, в школах робототехники используют для обучения lego-платформы), дети учатся разбираться в новых технологиях и осваивают азы востребованной профессии.
Ребятам будет интересно самостоятельно построить или поучаствовать в сборке:
- механических насекомых, которые передвигаются, светятся в темноте;
- квадропода (4-хногого шагохода) по специальным чертежам;
- умных робоживотных, которые могут передвигаться по заданной траектории;
- робота-колобка для накопления солнечной энергии;
- настоящей роботизированной руки для игры на барабане и других манипуляций.
Полезные роботизированные устройства для начинающих
Первые шаги в робототехнике можно начать:
Необходимые навыки
Для изготовления роботов новичкам потребуются следующие навыки:
- умение конструировать, создавать механизмы;
- знание того, как обеспечивается взаимодействие маленьких помощников с внешней средой;
- изучение темы, так как сделать шагающего робота своими руками – задача не из легких;
- начальное представление о программировании – переменных, алгоритмах, современных языках.
Познакомившись с азами программирования, можно переходить к созданию самодельных роботов-пылесосов, мойщиков бассейнов и окон в доме. Применение роботам можно найти и в других сферах жизни.
Читайте также: