
Металлоискатель на микроконтроллере своими руками
Добавил пользователь Morpheus Обновлено: 19.09.2024
Металлоискатель или металлодетектор предназначен для обнаружения предметов, по своим электрическим и/или магнитным свойствам отличающихся от среды, в которой они находятся. Попросту говоря, он позволяет находить металл в земле. Но не только металл, и не только в грунте. Металлодетекторами пользуются службы досмотра, криминалисты, военные, геологи, строители для поиска профилей под обшивкой, арматуры, сверки планов-схем подземных коммуникаций, и люди многих других специальностей.
Металлоискатели своими руками чаще всего делают любители: кладоискатели, краеведы, члены военно-исторических объединений. Им, начинающим, и предназначена в первую очередь данная статья; описанные в ней устройства позволяют найти монету с советский пятак на глубине до 20-30 см или железяку с канализационный люк примерно в 1-1,5 м под поверхностью. Однако этот самодельный приборчик может пригодиться и на хозяйстве при ремонте или на стройке. Наконец, обнаружив в земле центнер-другой брошенной трубы или металлоконструкций и сдав находку в металлолом, можно выручить приличную сумму. А подобных сокровищ в земле российской точно больше, чем пиратских сундуков с дублонами или боярско-разбойничьих кубышек с ефимками.

Принцип действия
Металлоискатель действует по принципу электромагнитной индукции. В общем схема металлоискателя состоит из передатчика электромагнитных колебаний, передающей катушки, приемной катушки, приемника, схемы выделения полезного сигнала (дискриминатора) и устройства индикации. Отдельные функциональные узлы часто объединяют схемотехнически и конструктивно, напр., приемник и передатчик могут работать на одну катушку, приемная часть сразу выделяет полезный сигнал и т.п.
Принцип действия металлоискателя
Катушка создает в среде электромагнитное поле (ЭМП) определенной структуры. Если в зоне его действия оказывается электропроводящий предмет, поз. А на рис., в нем наводятся вихревые токи или токи Фуко, которые создают его собственное ЭМП. В результате структура поля катушки искажается, поз. Б. Если же предмет не электропроводящий, но обладает ферромагнитными свойствами, то он искажает исходное поле за счет экранирования. В том и другом случае приемник улавливает отличие ЭМП от исходного и преобразует его в акустический и/или оптический сигнал.
Примечание: в принципе для металлоискателя не обязательно, чтобы предмет был электропроводящим, грунт – нет. Главное, чтобы их электрические и/или магнитные свойства отличались.
Детектор или сканер?
В коммерческих источниках дорогие высокочувствительные металлодетекторы, напр. Терра-Н, нередко называют геосканерами. Это неверно. Геосканеры действуют по принципу измерения электропроводности грунта по разным направлениям на разной глубине, эта процедура называется боковым каротажем. По данным каротажа компьютер строит на дисплее картинку всего, что в земле, включая различные по свойствам геологические слои.
Разновидности
Общие параметры
Принцип действия металлодетектора возможно воплотить технически разными способами соответственно назначению прибора. Металлоискатели для пляжного золотоискательства и строительно-ремонтного поиска внешне могут быть похожи, но существенно отличаться по схеме и техническим данным. Чтобы правильно сделать металлоискатель, нужно четко представлять себе, каким требованиям он должен удовлетворять для данного рода работы. Исходя из этого, можно выделить следующие параметры поисковых детекторов металла:
Дискриминация, в свою очередь, параметр составной, т.к. на выходе металлоискателя наличествует 1, максимум 2 сигнала, а величин, определяющих свойства и расположение находки, больше. Тем не менее, с учетом изменения реакции прибора во время приближения к объекту, в нем выделяются 3 составляющих:
- Пространственная – свидетельствует о расположении объекта в зоне поиска и глубине его залегания.
- Геометрическая – дает возможность судить о форме и размерах объекта.
- Качественная – позволяет строить предположения о свойствах материала объекта.
Рабочая частота
Все параметры металлоискателя связаны сложным образом и многие взаимосвязи взаимоисключающие. Так, напр., понижение частоты генератора позволяет добиться большего проницания и зоны поиска, но ценой увеличения энергопотребления, и ухудшает чувствительность и мобильность вследствие возрастания размеров катушки. В целом же каждый параметр и их комплексы так или иначе привязаны к частоте генератора. Поэтому первоначальная классификация металлоискателей строится по диапазону рабочих частот:
Особняком стоят импульсные металлоискатели. У них первичный ток в катушку поступает импульсами. Задав частоту следования импульсов в пределах НЧ, а их длительность, которая определяет спектральный состав сигнала, соответствующей диапазонам ПЧ-ВЧ, можно получить металлодетектор, совмещающий в себе положительные свойства НЧ, ПЧ и ВЧ или перестраиваемый.
Метод поиска
Насчитывается не менее 10 методов поиска предметов с помощью ЭМП. Но такие, как, скажем, метод непосредственной оцифровки ответного сигнала с компьютерной обработкой – удел профессионального применения.

Самодельный металлоискатель схемотехнически строят более всего следующими способами:
- Параметрическим.
- Приемо-передающим.
- С накоплением фазы.
- На биениях.
Без приемника
С приемником и передатчиком
Устройство приемопередающего металлоискателя показано на рис. в начале, к пояснению принципа действия; там же описан и принцип работы. Такие приборы позволяют добиться наилучшей эффективности в своем диапазоне частот, но сложны схемотехнически, требуют особо качественной системы катушек. Приемопередающие металлоискатели с одной катушкой называются индукционными. Их повторяемость лучше, т.к. проблема правильного расположения катушек относительно друг друга отпадает, но схемотехника сложнее – нужно выделить слабый вторичный сигнал на фоне сильного первичного.
До щелчка
Во втором случае техника поиска та же, но работают 2 строго симметричных электрически и геометрически генератора, каждый на свою катушку. При этом вследствие взаимодействия их ЭМП происходит взаимная синхронизация: генераторы работают в такт. При искажении общего ЭМП начинаются срывы синхронизации, слышимые как те же щелчки, а затем тон. Двухкатушечные металлоискатели со срывом синхронизации проще импульсных, но менее чувствительны: проницание их в 1,5-2 раза меньше. Дискриминация в обоих случаях близка к отличной.
Фазочувствительные металлодетекторы – любимые инструменты курортных старателей. Асы поиска настраивают свои приборы так, что точно над объектом звук снова пропадает: частота следования щелчков переходит в ультразвуковую область. Таким способом на ракушечном пляже удается находить золотые серьги размером с ноготь на глубине до 40 см. Однако на грунте с мелкими неоднородностями, обводненном и минерализованном, металлоискатели с накоплением фазы уступают прочим, кроме параметрических.
По писку
В металлоискателе на биениях действуют 2 генератора: опорный и рабочий. Катушка колебательного контура опорного маленькая, защищенная от посторонних влияний, или его частота стабилизирована кварцевым резонатором (попросту – кварцем). Контурная катушка рабочего (поискового) генератора – поисковая, и его частота зависит от наличия предметов в зоне поиска. Перед поиском рабочий генератор настраивают на нулевые биения, т.е. до совпадения частот. Полного нуля звука как правило не добиваются, а настраивают до очень низкого тона или хрипа, так удобнее искать. По изменению тона биений судят о наличии, величине, свойствах и расположении объекта.
Примечание: чаще всего частоту поискового генератора берут в несколько раз ниже опорной и работают на гармониках. Это позволяет, во-первых, избежать вредного в данном случае взаимного влияния генераторов; во-вторых, точнее настроить прибор, в-третьих, вести поиск на оптимальной в данном случае частоте.
Металлоискатели на гармониках в общем сложнее импульсных, однако работают на любом грунте. Правильно изготовленные и настроенные, они не уступают импульсным. Об этом можно судить хотя бы по тому, что золотоискатели-пляжники никак не сойдутся во мнениях, что же лучше: импульсник или на биениях?
Катушка и прочее
О размерах катушки
Монопетля
Индуктивность
При выборе схемы, чтобы убедиться в достоверности обещаний автора, и тем более при самостоятельном конструировании или доработке, нужно знать индуктивность катушки и уметь ее рассчитывать. Даже если вы делаете металлоискатель из покупного набора, индуктивность все равно нужно проверить измерениями или расчетом, чтобы не ломать потом голову: почему, все вот вроде исправно, а не пищит.
Калькуляторы для расчета индуктивности катушек имеются в интернете, но компьютерная программа все случаи практики предусмотреть не может. Поэтому на рис. дана старая, десятилетиями проверенная номограмма для расчета многослойных катушек; тонкая катушка – частный случай многослойной.

Номограмма для расчета многослойных катушек
Для расчета поисковой монопетли номограммой пользуются следующим образом:
- Берем величину индуктивности L из описания прибора и размеры петли D, l и t оттуда же или по своему выбору; типичные значения: L = 10 мГн, D = 20 см, l = t = 1 см.
- По номограмме определяем количество витков w.
- Задаемся коэффициентом укладки k = 0,5, по размерам l (высота катушки) и t (ширина ее) определяем площадь сечения петли и находим площадь чистой меди в ней как S = klt.
- Поделив S на w, получим сечение обмоточного провода, а по нему – диаметр провода d.
- Если получилось d = (0,5…0,8) мм, все ОК. В противном случае увеличиваем l и t при d>0,8 мм или уменьшаем при d
Есть несколько хороших примеров того, как собрать металлоискатель своими руками. Однако, для них обычно необходимо либо довольно много внешних компонентов для обработки аналогового сигнала, либо чувствительность на выходе довольно слабая.
С другой стороны, металлоискатель на микроконтроллере работает на частоте 16 МГц и имеет довольно неплохие возможности синхронизации, а именно разрешение 0,0625 мкс при использовании тактовой частоты. Таким образом, вместо того, чтобы использовать аналоговый вход для считывания, самым простым способом восприятия небольших динамических изменений напряжения является сравнение изменения падения напряжения с течением времени при фиксированном опорном напряжении.
Для этой цели ATmega328 имеет подходящие особенности внутреннего компаратора между D6 и D7. Этот компаратор способен инициировать прерывание, что позволяет точно обрабатывать события. Используя его вместе с аккуратно закодированными процедурами синхронизации, такими как millis () и micos (), а также используя внутренний таймер ATmega328 с гораздо более высоким разрешением, Arduino — отличная основа для подобного рода металлоискателя.
Итоговый вариант кода для Arduino:
Конечно, эта идея не совсем новая. Основная часть этого кода может быть другой. Попробуйте поискать в других источниках, например TPIMD.
Шаг 1: Идея индукционного детектора на Arduino — флип-катушка
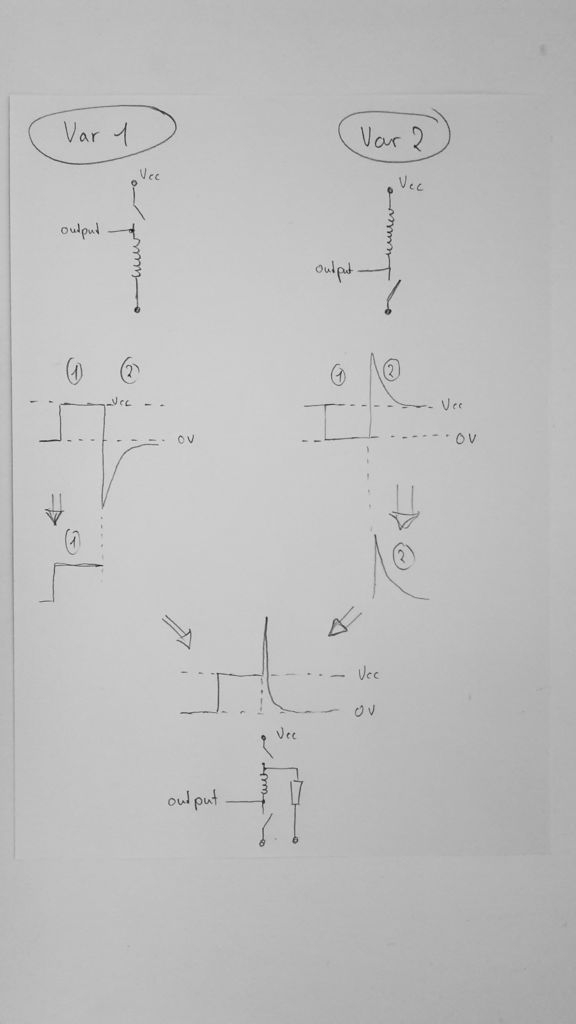
Идея состоит в том, чтобы использовать Arduino как детектор импульсной индукции, как и в TPIMD, поскольку задумка с кривой затухания, похоже, работает очень хорошо. Проблема с импульсными индукционными детекторами заключается в том, что они обычно нуждаются в разном напряжении для работы. Одно напряжение для питания катушки и отдельное напряжение для обработки кривой затухания. Эти два источника напряжения всегда усложняют процесс постройки импульсных индукционных детекторов.
Проблема в том, что катушка меняет свою полярность после импульса. Если импульс положительный (Var 1. на прилагаемом рисунке) кривая распада отрицательна. Если импульс отрицательный, кривая затухания будет положительной (Var 2. на прилагаемом рисунке).
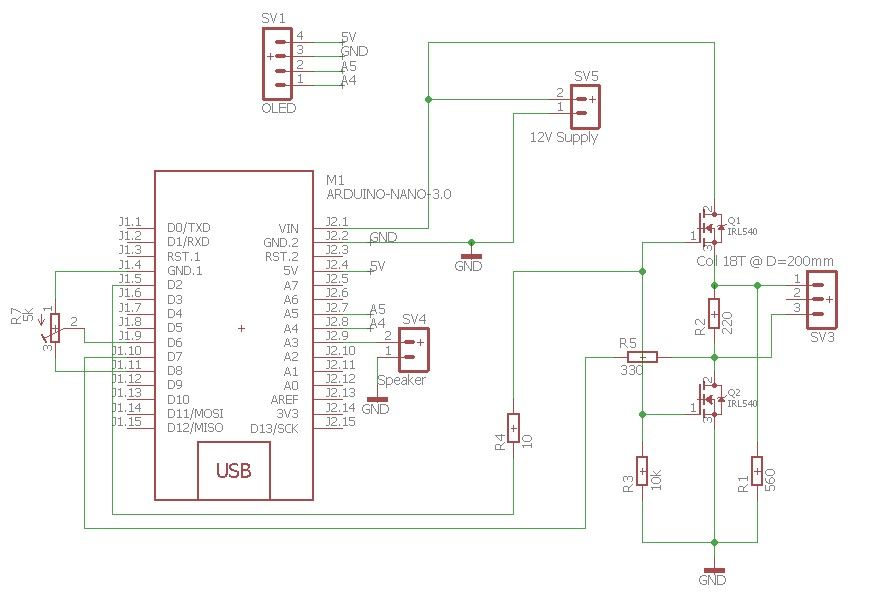
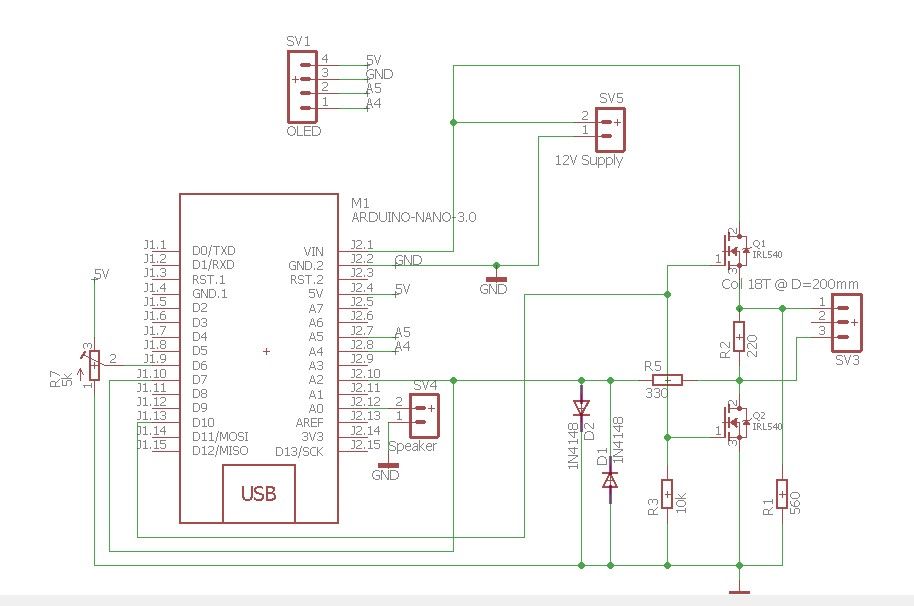
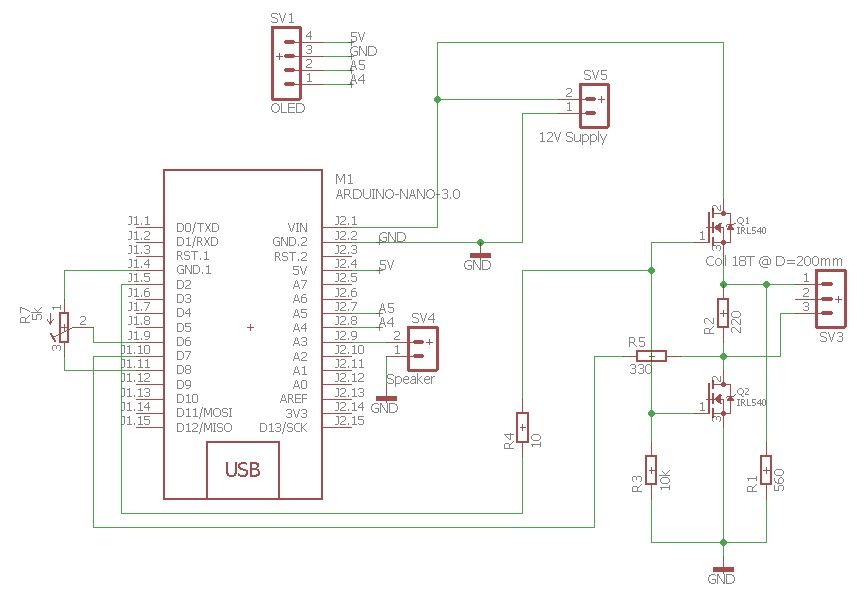
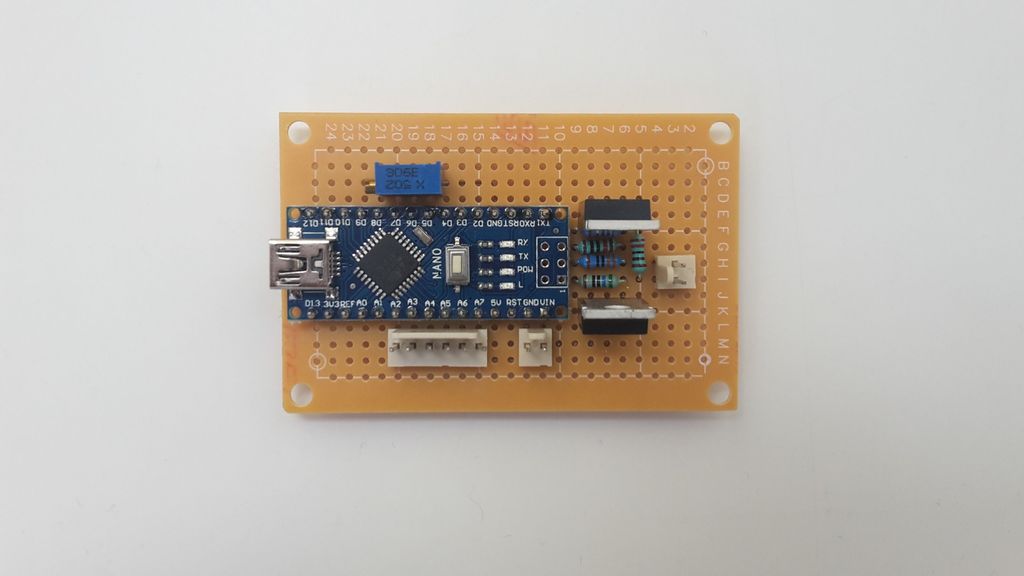
После некоторых экспериментов я остановился на следующей схеме:
Схема состоит из модуля Arduino Nano. Этот модуль управляет двумя МОП-транзисторами, питающими катушку (на SV3) через D10. Когда импульс на конце D10 заканчивается, оба МОП-транзистора изолируют катушку от 12V и GND.
Сохраненная энергия в катушке выходит через резистор R2 (220 Ом). В то же время резистор R1 (560 Ом) соединяет первую положительную сторону катушки с GND. Это изменяет отрицательную кривую затухания на резисторе R5 (330 Ом) до положительной кривой. Диоды защищают входной вывод Arduino.
R7 является делителем напряжения около 0,04 В. В настоящее время кривая затухания на D7 становится более отрицательной, чем 0,04 на D6, прерывание срабатывает, а длительность после окончания импульса сохраняется.
В случае металла вблизи катушки кривая затухания длится дольше, а время между окончанием импульса и прерыванием увеличивается.
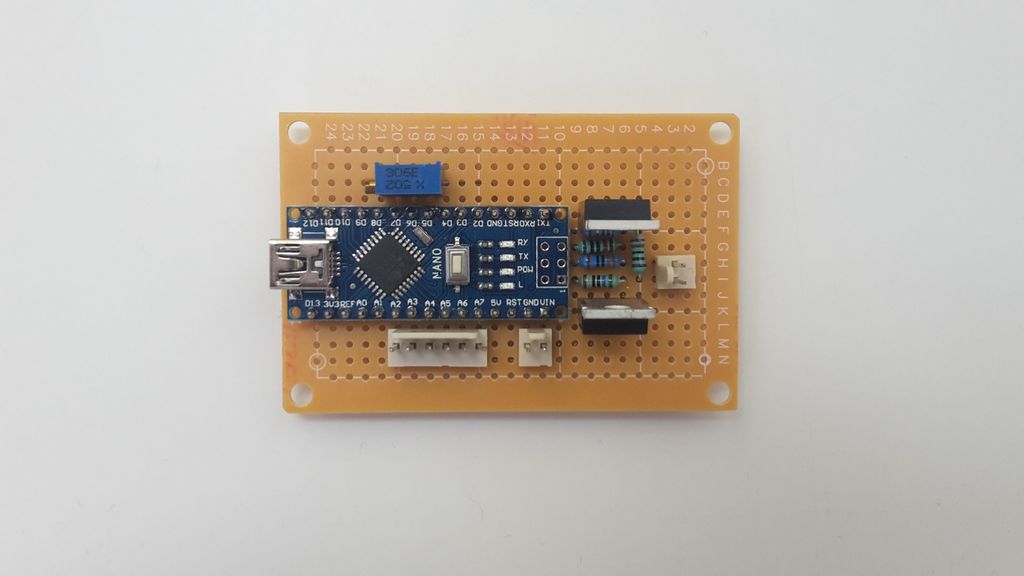
Шаг 2: Строим детектор (макет)
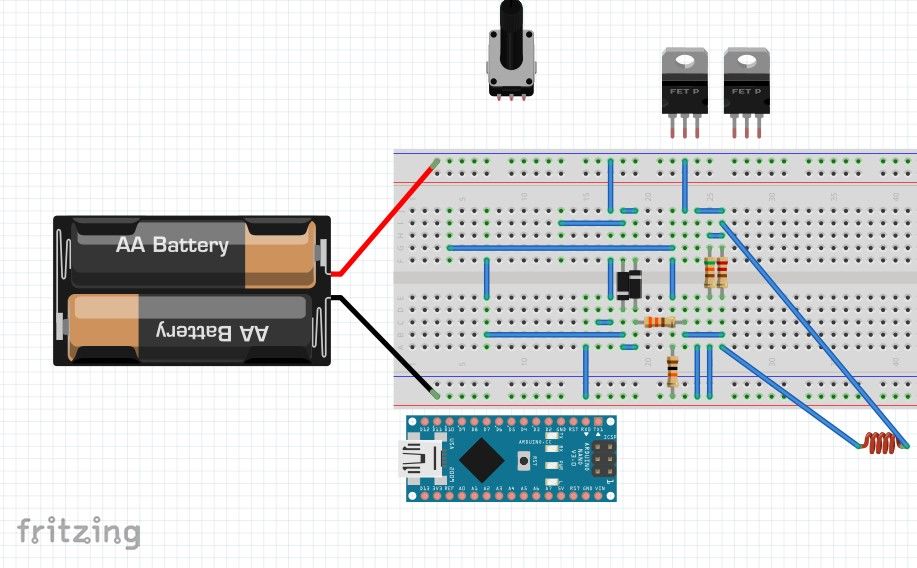
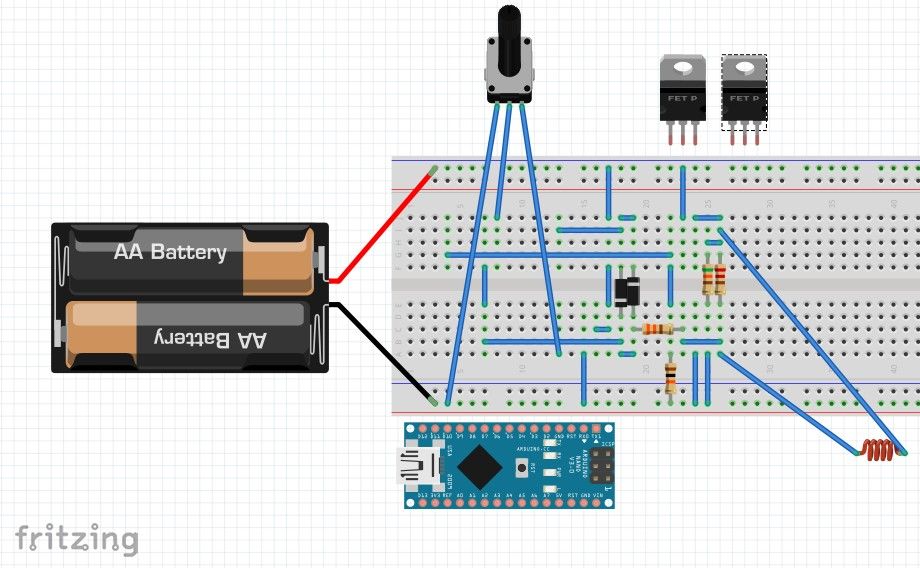
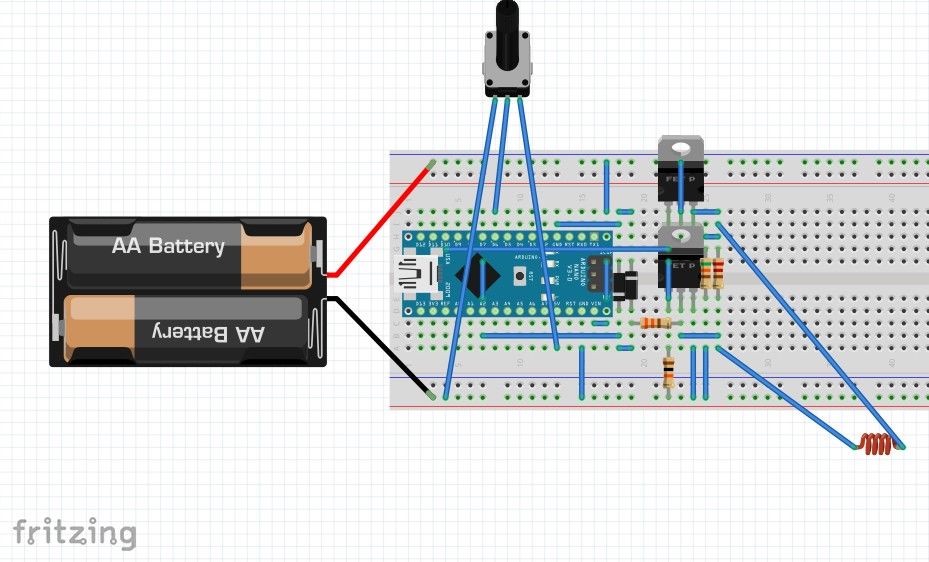
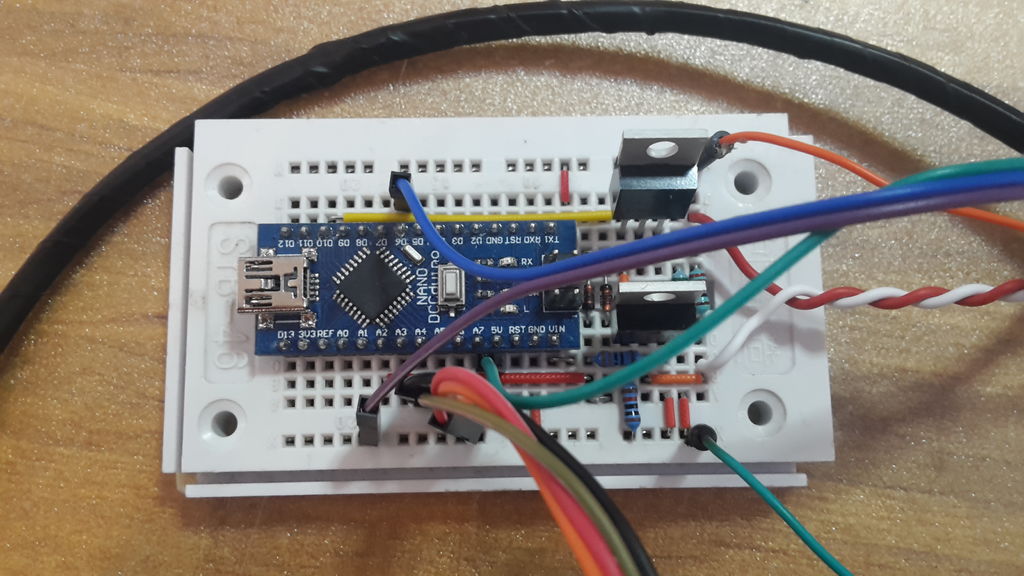
Процесс построения детектора довольно прост. Это можно сделать либо на макете (придерживаясь оригинальной схемы), либо используя пайку деталей на печатной плате.
Светодиод D13 на плате Arduino Nano используется в качестве индикатора для металла.
Использование макета — самый быстрый способ сделать работающий детектор. Нужно провести некоторую проводку, но это может быть сделано на отдельном маленьком макете. На снимках это показано в 3 этапа, так как Arduino и МОП-транзисторы скрывают некоторые из проводов. При тестировании я случайно отключил диоды, не заметив сразу. Это особо не повлияло на поведение детектора. В версии на печатной плате я их оставил.
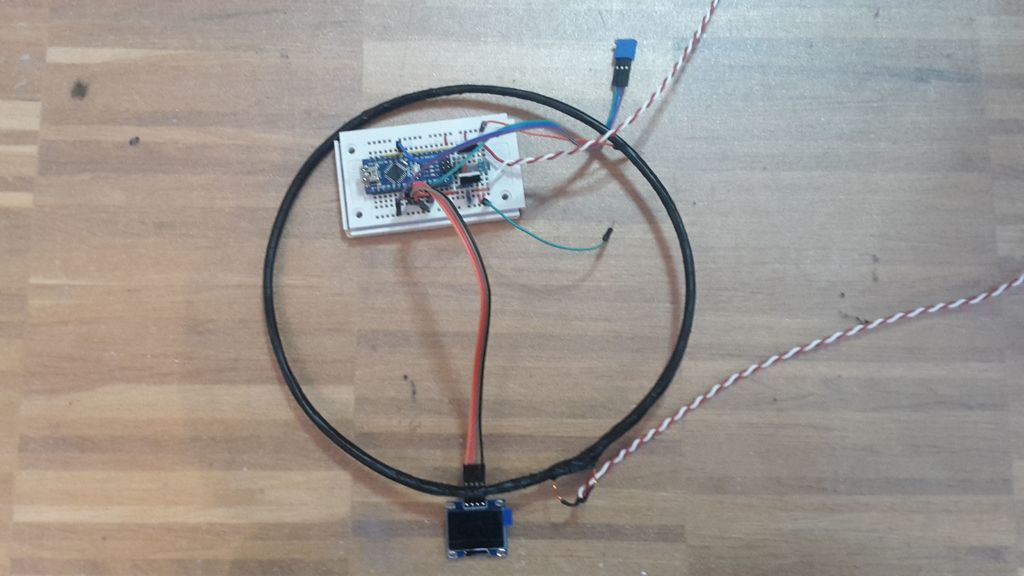
На рисунках не показаны подключения к OLED-дисплею 0,96. Этот дисплей подключен таким образом:
Vcc — 5В (на выводе Arduino, а не на блоке питания!)
GND — GND
SCL — A5
SDA — A4
Этот OLED-дисплей необходим для первоначальной калибровки детектора. Это делается путем установки правильного напряжения на PIN6 Arduino. Это напряжение должно быть около 0,04 В. Дисплей помогает установить правильное напряжение.
Макетная версия работает очень хорошо, хотя, вероятно, не подходит использования в полевых условиях.
Шаг 3: Проект на печатной плате
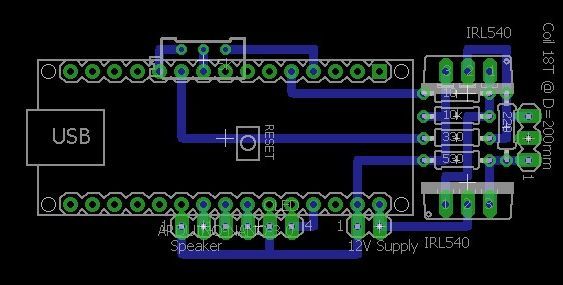
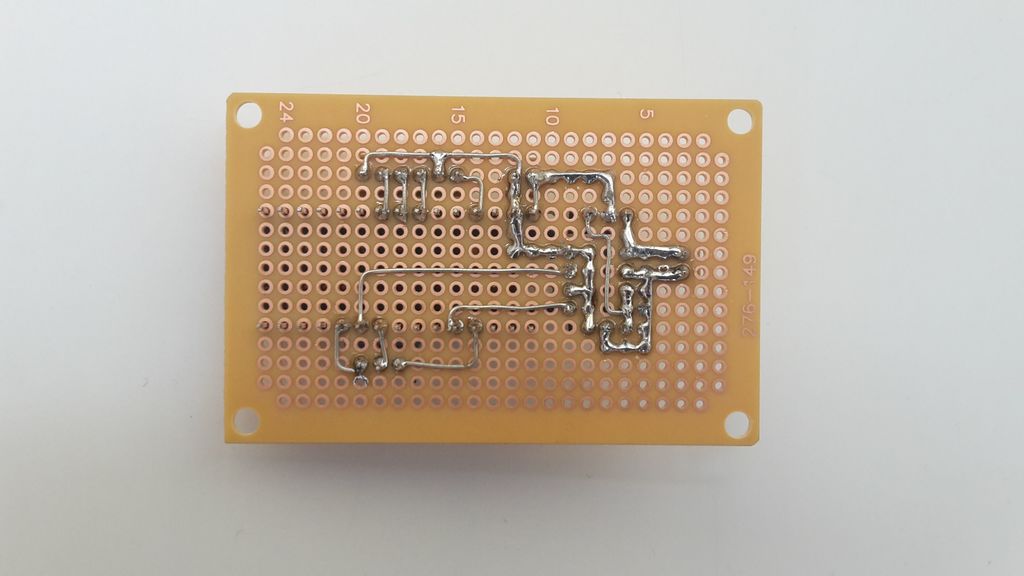
Что касается пайки, мне не очень нравится двухсторонняя высокотехнологичная печатная плата, поэтому я изменил схему для односторонней.
Сделаны следующие изменения:
- Диоды были исключены.
- На контакты МОП-транзисторов добавлен резистор 10 Ом
- Напряжение питания делителя напряжения на D6 задается сигналом высокого уровня на D8
- Пин драйвера для МОП-транзисторов был изменен.
Шаг 4: Настройка и использование детектора
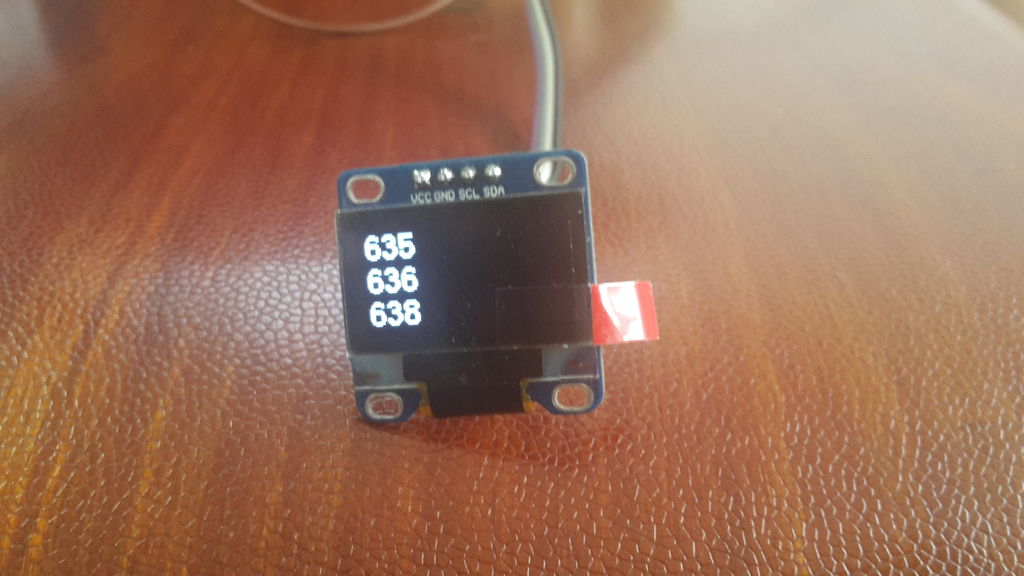



Эти три значения должны быть более или менее одинаковыми (в моих тестах до 1000). Среднее значение должно быть более или менее стабильным.
Чтобы начать первоначальную настройку, рядом с катушкой не должно быть металла.
Теперь делитель напряжения (подстроечный резистор) должен быть выставлен таким образом, чтобы нижние два значения были установлены на максимум, сохраняя при этом стабильное показание. Существует критическая настройка, когда среднее значение начинает давать странные показания. Поверните триммер, чтобы снова получить стабильные значения.
Может случиться, что дисплей зависает. Просто нажмите кнопку сброса и начните заново.
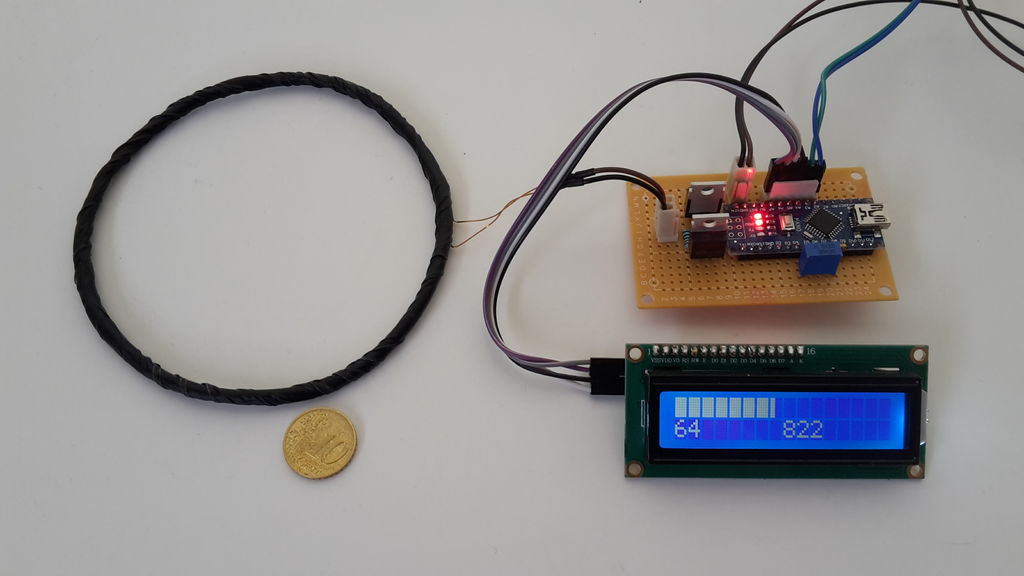
Для моей конфигурации (катушка: 18 оборотов\20 см) стабильное значение составляет около 630-650. После установки нажмите кнопку сброса, аппарат снова откалибрует и все три значения будут в одном диапазоне. Если металл теперь поднести к катушке, светодиод на плате Arduino (D13) должен загореться. Прилагаемый динамик издает несколько щелчков (в исходном коде есть пространство для улучшений).
Во избежание высоких ожиданий:
Детектор обнаруживает некоторые вещи, но он остается очень простым и ограниченным.
Чтобы дать представление о возможностях, я сравнил некоторые другие детекторы со своими. Результаты по-прежнему весьма впечатляют для детектора с 8 внешними элементами, но не дотягивают до профессионального оборудования.
Глядя на схему и программу, я вижу много возможностей для улучшения. Значения резисторов были подобраны исходя из опыта, время импульса 250 мс было выбрано случайным образом, параметры катушки тоже.
Шаг 5: Подключение дисплея 16х2
Во время тестирования я понял, что библиотека для OLED-дисплея I2C потребляла слишком много ресурсов, поэтому я решил использовать 16×2-дисплей с конвертером I2C.
Второе значение показывает фактическое значение задержки кривой затухания. Это значение обычно не так интересно, но оно необходимо для первоначальной настройки детектора.
Теперь программа позволяет отслеживать множественные длительности импульсов в последовательности (средство для экспериментов / улучшения производительности). Тем не менее, я не добился какого-нибудь прорыва, поэтому значение по умолчанию установлено на одну длительность импульса.
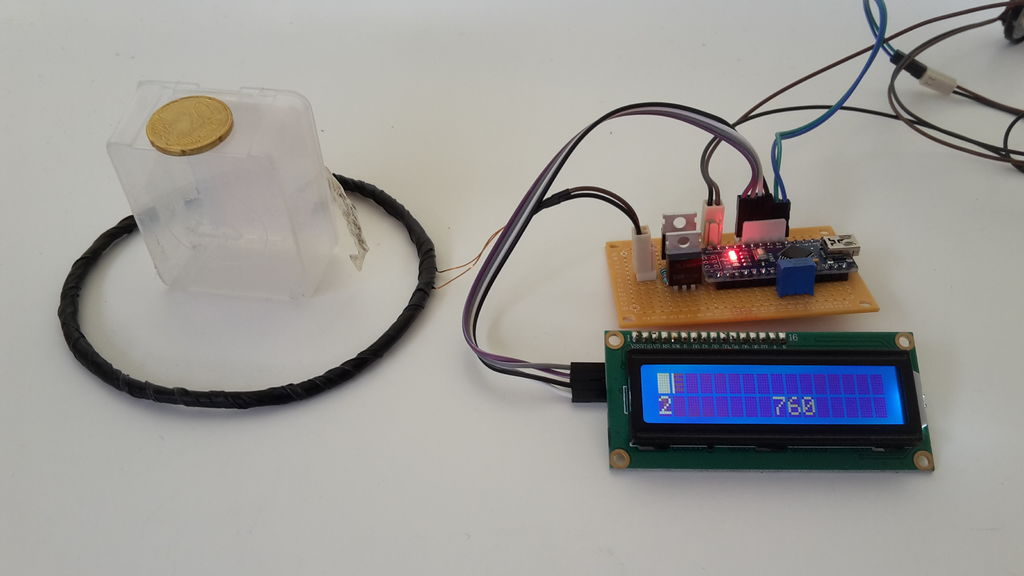
Начальная настройка детектора
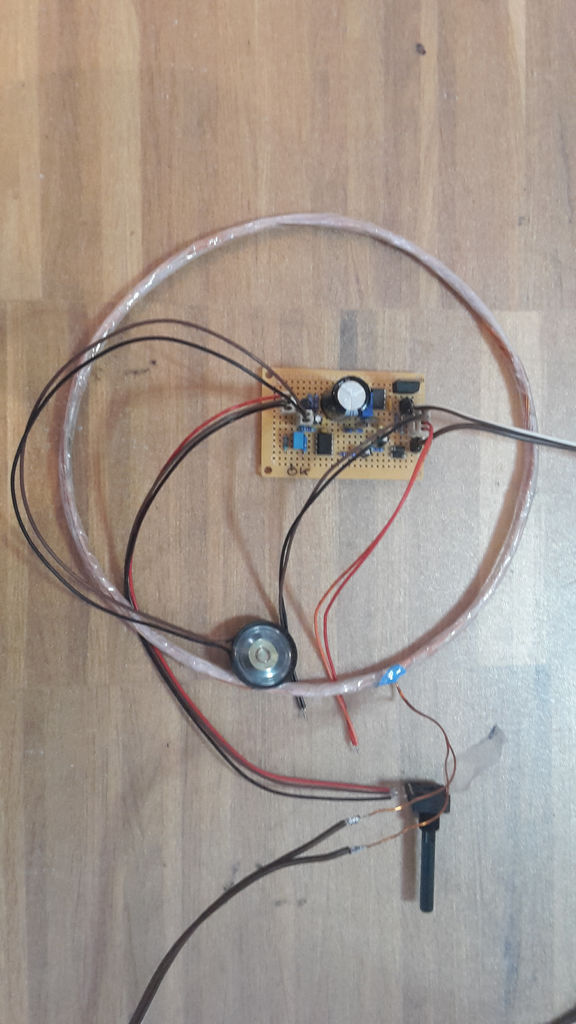
Катушки
Я сделал 3 катушки для дальнейшего тестирования схемы импульсного металлоискателя:
- 1 -> 18 витков/ 200 мм
- 2 -> 25 витков/100 мм
- 3 -> 48 витков/100 мм
Интересно, что все катушки работали довольно хорошо, с почти одинаковой производительностью (рублевая монета на 40-50 мм в воздухе). Это может быть весьма субъективное наблюдение.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Схема заработала, но ряд моментов в прошивке контроллера и самой схеме мне не понравилось.
Творческий зуд заставил меня написать под ту плату свою прошивку. Не полное использование потенциала контроллера и желание ещё больше упростить схему аналоговой части подтолкнули на эксперименты. В результате было "отутюжено" с десяток вариантов плат и в конце концов родился "Питон" (точнее Pi-Tone) как попытка устранить главный недостаток "ИМПАД"-"ПИРАТ" - жуткий звук. (У меня через 20-30 минут от слушания его жужжания начинала болеть голова). К сожалению, ресурсов PIC12F675 для реализации задуманного не хватило.
Пришлось применить PIC12F683. Он всего на 10-15 центов дороже, чем PIC12F675, зато теперь не только на всё хватило ресурсов, но и остался задел для дальнейшего развития проекта (а задумки уже есть).
Чувствительность металлоискателя при "правильных" деталях и точном исполнении поисковой катушки те же 20-25см на 5 коп. СССР и примерно полтора метра на крупные металлические предметы вроде двери. Ток потребления в режиме поиска около 30 мА и при сработке около 50 мА.
Кроме лучшего звука, за счёт применения контроллера, удалось добавить в схему контроль напряжения аккумулятора. При включении "Питон" сообщает уровень заряда: три сигнала - напряжение батареи выше 12в, два - более 11,3в, один - выше 10,5в. При снижении напряжения ниже 10,3в (для аккумулятора это критическая величина) работа формирователя импульсов останавливается и контроллер издаёт звук, оповещающий о прекращении работы металлоискателя.
Светодиод работает синхронно с генерацией звуков, поэтому на эту цепь можно подключить цепь управления вибромоторчиком для беззвучного режима.
Динамик лучше использовать высокоомный (30-50 Ом). С наушниками чувствительность металлоискателя немного выше (видимо из-за меньшего потребления тока и нагрузки на батарею).
При правильной сборке из исправных деталей металлодетектор начинает работать сразу и без настройки, если Вы не захотите экспериментировать с катушкой. Я рассчитывал номиналы на плате и временные параметры работы контроллера под определённую катушку. Её надо будет сделать точно.
Катушка делается очень просто - из самого обычного и распространённого кабеля для компьютерных сетей, витой пары. 4 пары без экрана. Понадобится кусок длинной ровно 2 метра.
Далее, надо будет с каждого конца удалить трубку изоляции длинной примерно 2-3см. и зачистить кончики всех восьми одножильных проводков витых пар. Далее надеваем на проводки изоляционные трубочки и спаиваем концы так, чтобы получить 8 витков провода. С учётом трёх колец кабеля имеем 3 х 8 = 24 витка в катушке.
Запрограммировать микроконтроллер PIC12F683 можно с помощью такого программатора.
Порядок спайки концов катушки:


Вот такой вид имеют контакты самодельной катушки из витой пары:

От поисковой катушки до платы потребуется кусок кабеля. Я использовал аудиокабель - 2 жилы в толстом прозрачном силиконе. Сечение 0,75мм по меди. Почему он? У него низкая погонная ёмкость. Это способствует отсутствию паразитных колебаний ("звона") сигнала при формировании зондирующих импульсов. Если Вы примените другой кабель, возможно понадобится подбор шунтирующих катушку резисторов (R4 и R5).
Если Вам хочется получить максимальную дальность обнаружения металлических предметов, ниже методика подбора сопротивления параллельно катушке от автора "Пирата":
Как настроить резистор параллельный катушке.
Заменяем его цепочкой из переменного 470 Ом, например, и постоянного 150 Ом не менее 0,5 Вт.
1-установить переменный резистор в положение минимального сопротивления.
2-выставить резистором "Порог" максимальную чувствительность и замерить линейкой дальность для выбранной мишени (монета, или банка и т.д.)
3-Увеличить сопротивление переменного резистора примерно на 10%.
4-снова точно выставить "Порог" и замерить дальность линейкой.
Повторять эти операции пока чутьё будет расти. Пройдя оптимальное значение для сопротивления к катушке дальность начнёт уменьшаться. Это сопротивление нужно подобрать с точностью 5-10 Ом и заменить на постоянное.
Настраивать лучше с наушниками, уменьшив их громкость до приемлемой.

Моей целью было сделать схему максимально простой и использовать только популярные/дешевые электронные компоненты. Устройство было протестировано с очень маленькой катушкой (диаметр 55 мм, около 30 витков 0,5 мм) и питанием только 3 В.
Это моя первая разработка PI металлоискателя, и я очень доволен результатами! Прототип мог обнаруживать маленькие монеты на расстоянии 6 см и провода в стене. Код находится на Github здесь.

Импульсный металлоискатель — как это работает?
Представленный металлоискатель использует метод PI для генерации всплеска напряжения в поисковой катушке, подключенной параллельно конденсатору.
Затем ATtiny13 использует аналоговый компаратор для измерения времени спада до нуля резонансного контура. Когда металлический объект приближается к катушке, это сокращает время, необходимое для затухания импульса до нуля.
Изменение ширины резонансного времени измеряется для того, чтобы сигнализировать о присутствии металлической мишени.

Обратите внимание, что в типичных конструкциях PI-детекторов отсутствует резонансный контур, и измеренный коэффициент немного отличается!
Инструкции пользователя
- Включите устройство. Процесс калибровки занимает около секунды и заканчивается сигналом зуммера.
- Используйте переменный резистор для регулировки чувствительности детектора (вы можете найти его где-то между непрерывным сигналом зуммера и полной тишиной).
- Устройство готово к работе!
Необходимые детали:
- ATtiny13
- T1 — полевой транзистор IRF3205 (N-канальный )
- LED1 — светодиод
- D1 — диод 1N4007
- D2, D3 — диод 1N4148
- R1- переменный резистор 10 кОм
- R2, R3 – резистор 220 Ом (5%)
- R4 – резистор 330 Ом (5%)
- R5, R6 – резистор10 кОм (5%)
- C1 – конденсатор 470 нФ
- L1 – катушка диаметр 50-55 мм, около 30 витков, провод 0,5 мм.

Программное обеспечение
Этот код написан на C и может быть скомпилирован с помощью avr-gcc. Вся информация о том, как скомпилировать этот проект, находится здесь.
Читайте также: