
Механический тормоз для электродвигателя своими руками
Добавил пользователь Валентин П. Обновлено: 18.09.2024
Большинство асинхронных двигателей, используемых в промышленном оборудовании, подключаются через преобразователи частоты. Частотник прекрасно справляется с замедлением и торможением привода. Избыточная энергия, которая при динамическом торможении накапливается на конденсаторах звена постоянного тока, выделяется в виде тепла на тормозном резисторе. Однако есть ситуации, когда требуется специализированное решение — двигатель с электромеханическим (электромагнитным) тормозом.
Актуальность применения электромагнитного тормоза
Преобразователь частоты может некоторое время удерживать ротор в неподвижном состоянии путем подачи на двигатель постоянного напряжения. Однако электропривод способен находиться в таком режиме лишь несколько минут, после чего начинают перегреваться обмотки. Поэтому в ряде случаев применяют электродвигатели с тормозом. Прежде всего это относится к грузоподъемному оборудованию — кранам, лифтам и проч.
Электромеханический тормоз позволяет быстро останавливать привод и удерживать его в неподвижном состоянии сколь угодно долго. Обычно такая необходимость продиктована соображениями безопасной эксплуатации оборудования.
Конструкция
В конструкцию электромагнитного тормоза входят:
- электромагнит с катушкой
- тормозной диск с накладками
- прижимные пружины
- система настройки прижимного момента
В большинстве случаев тормоз является нормально заторможенным. Это означает, что ротор двигателя фиксируется при отсутствии питания тормоза. При подаче питания на катушку тормозные колодки отжимаются, и ротор растормаживается.

Способы монтажа
Тормоз может быть встроен в конструкцию двигателя либо являться отдельным устройством. Наиболее предпочтителен встроенный тормоз, который располагается на оси ротора. Такая конструкция отличается компактностью и простотой в эксплуатации.
Если применение двигателя со встроенным тормозом по каким-то причинам нецелесообразно, применяют отдельный тормоз. Его основные преимущества – возможность монтажа в любом месте привода (например, на оси редуктора), размеры и способ крепления устройства не привязаны к конструкции двигателя.
Способы подачи питания на тормоз
Электромеханический тормоз может иметь зависимое или независимое питание. В первом случае его катушка запитывается от того же источника, что и обмотки двигателя. При этом тормоз должен быть нормально заторможенным, чтобы при пропадании питания он фиксировал ротор.
Тормоз с независимым питанием может управляться более гибко, однако он требует отдельную схему питания, которая должна быть синхронизирована с питанием двигателя. Наиболее универсальный тормоз данного типа – двухобмоточный. Катушка в нем состоит из двух обмоток. Короткой обмоткой тормоз включается, длинной (с меньшим током) удерживается.
Если питание двигателя производится от ПЧ, необходимо в настройках преобразователя обратить внимание на параметры электромеханического тормоза. В идеальном варианте ПЧ и двигатель с тормозом должны быть выпущены одним производителем.
Временные параметры торможения
При проектировании тормозной системы следует учитывать, что время срабатывания тормоза обычно гораздо меньше, чем время его отпускания.
Типовым временем включения тормоза (растормаживание при включении двигателя) можно считать 40-60 мс в зависимости от мощности и напряжения питания. Время выключения при правильной регулировке не должно превышать 0,2 с.
Обслуживание электромеханического тормоза
Поскольку тормоз является электромеханическим устройством, подверженным износу, он нуждается в регулярном техническом обслуживании. Необходимо регулярно проверять тормозной зазор, который должен иметь значение, рекомендованное производителем. Зазор может уменьшаться или увеличиваться, а также иметь перекосы из-за износа тормозных колодок либо пружин, нарушения крепежа.
Поскольку при работе двигателя тормоз подвергается ударам и вибрации, необходимо тщательно следить за фиксацией крепежных гаек и шпилек. Такеж рекомендуется использовать фиксатор резьбы.
Для ремонта и технического обслуживания оборудования обычно предусматривается возможность ручного растормаживания при помощи специального рычага. Эту функцию нужно использовать осторожно во избежание порчи оборудования и травм персонала.
Тормозной момент электромагнитного тормоза может быть отрегулирован в некоторых пределах.
Режим работы
Использовать электромеханический тормоз для торможения двигателя на ненулевой скорости рекомендуется только в аварийных случаях, поскольку в этом режиме резко повышается износ и нагрев тормозных колодок. Схема должна быть спроектирована таким образом, чтобы тормоз был стояночным, то есть включался только на нулевой скорости. Для этого в ПЧ имеется специальный выход. В таком режиме тормозные колодки почти не изнашиваются и имеют большой ресурс работы.
При частом использовании функции торможения происходит не только износ, но и нагрев тормоза. Если технологический процесс не позволяет сократить число торможений в единицу времени, следует предусмотреть дополнительный обдув тормоза, а также более ответственно подходить к его техобслуживанию.

После отключения от сети электродвигатель продолжает движение по инерции. При всем этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Потому скорость электродвигателя через просвет времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции именуется свободным выбегом . Многие электродвигатели, работающие в длительном режиме либо со значительными нагрузками, останавливают методом свободного выбега.
В тех же случаях, когда длительность свободного выбега значительна и влияет на производительность электродвигателя (работа с частыми запусками), для сокращения времени остановки используют искусственный способ преобразования кинетической энергии, запасенной в передвигающейся системе, именуемый торможением .
Все методы торможения электродвигателей можно поделить на два главных вида: механическое и электронное.

При механическом торможении кинетическая энергия преобразуется в термическую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электронном торможении кинетическая энергия преобразуется в электронную и зависимо от метода торможения мотора или отдается в сеть, или преобразуется в термическую энергию, идущую на нагрев обмоток мотора и реостатов.
Более совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя малозначительны
Схемы динамического торможения асинхронных движков
Для управления моментом при динамическом торможении асинхронным движком с фазным ротором по программке с заданием времени употребляются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети неизменного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе употребляются пусковые резисторы R1, включение которых в режиме динамического торможения делается отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде 1-го контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.

Рис. 1 Схемы управления динамическим торможением асинхронных движков с фазным ротором с заданием времени при наличии и отсутствии сети неизменного тока
Эквивалентное значение неизменного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б подходящим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть избран как на неизменном, так и на переменном токе зависимо от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут употребляться для управления режимом динамического торможения асинхронного мотора с короткозамкнутым ротором. Для этого обычно употребляется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных движков
При управлении моментом при торможении противовключением асинхронного мотора с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения употребляется реле контроля скорости SR, укрепляемое на движке. Реле настраивается на напряжение отпадания, соответственное скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема употребляется для остановки мотора с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR употребляется для отключения контакторов КМ2 либо КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости мотора, близкой к нулю. При реверсировании мотора команды SR не употребляются.

Рис. 2 Узлы схемы управления торможения противовключением асинхронного мотора с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным движком с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, к примеру, реле напряжения неизменного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Нередко для опции реле KV употребляется дополнительный резистор R3. Схема в главном используется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может употребляться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске мотора реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сходу после подачи управляющей команды на запуск.

Рис. 3. Узлы схем управления торможением противовключением асинхронных движков с фазным ротором с контролем скорости при реверсе и остановке
В режиме противовключения после подачи команды на реверс (рис. 3, а) либо остановку (рис. 3, б) скольжение электродвигателя увеличивается и происходит включение реле KV.
Реле KV отключает контакторы КМ4 и КМ5 и тем вводит полное сопротивление Rl + R 2 ротор мотора.
В конце процесса торможения при скорости асинхронного мотора, близкой к нулю и составляющей приблизительно 10 — 20 % установившейся исходной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 при помощи контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме либо команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных движков
При остановке асинхронных движков, также для удержания механизма передвижения либо подъема, к примеру в крановых промышленных установках, в недвижном состоянии при отключенном движке применяется механическое торможение. Оно обеспечивается электрическими колодочными либо другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB врубается и отключается совместно с движком (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если необходимо отключать тормоз не сразу с движком, а с некой задержкой по времени, к примеру после окончания электронного торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при выключении линейного контактора КМ1 (рис. 4, в).

Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных движков
В асинхронных электроприводах используются также электрические тормоза неизменного тока при управлении электродвигателем от сети неизменного тока.
Схемы конденсаторного торможения асинхронных движков
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, присоединенными к обмотке статора. Врубаются конденсаторы по схеме звезды (рис. 5, а) либо треугольника (рис. 5, б).

Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных движков

Встроенный тормоз электродвигателя
Электродвигатели с тормозом применяются во многих отраслях промышленности в качестве привода оборудования, требующего остановки за время, определенное регламентом в зависимости от производственной задачи после отключения питания мотора.
Двигатели могут комплектоваться тормозами постоянного или переменного тока различного напряжения в зависимости от габарита мотора. Могут быть укомплектованы ручкой для принудительного растормаживания или быть без нее. Тормозной момент электродвигателя может регулироваться или нет.
Устройство электромагнитного тормоза постоянного тока для электродвигателя
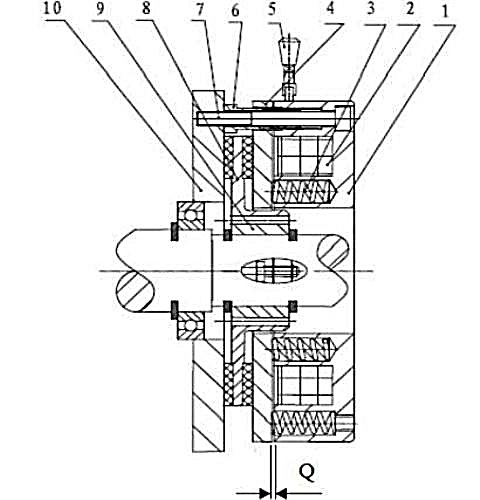
- Корпус электромагнита 2. Катушка тормоза 3. Пружина 4. Якорь электромагнита 5. Ручка растормаживания 6. Регулировочный болт 7. Болт крепления 8. Тормозной диск 9. Зубчатая муфта 10. Задний подшипниковый щит. Q — воздушный зазор.
Вы должны быть пользователем, чтобы
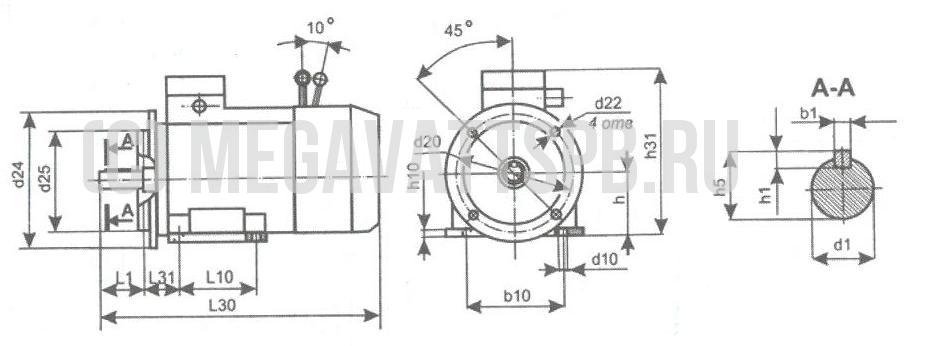
Габаритные и присоединительные размеры
Габаритно-присоединительные размеры электродвигателей со встроенным электромагнитным тормозом
| Тип | l30 | h31 | d24 | l1 | l10 | l31 | d1 | d10 | d20 | d22 | d25 | b1 | b10 | h1 | h5 | h10 | h |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| АИР56 Е (Е2) | 270 | 148 | 140 | 23 | 71 | 36 | 11 | 6 | 115 | 10 | 95 | 4 | 90 | 4 | 7 | 56 | |
| АИР63 Е (Е2) | 288 | 180 | 160 | 30 | 80 | 40 | 14 | 6 | 130 | 10 | 110 | 5 | 100 | 5 | 16 | 8 | 63 |
| АИР71 Е (Е2) | 355 | 190 | 200 | 40 | 90 | 45 | 19 | 8 | 165 | 12 | 130 | 6 | 112 | 6 | 21,5 | 8 | 71 |
| АИР80 Е (Е2) | 356 | 204 | 200 | 50,0 | 100 | 50 | 22 | 8 | 165 | 12 | 130 | 6 | 125 | 6 | 24,5 | 9 | 80 |
| АИР90L Е (Е2) | 420 | 250 | 250 | 50,0 | 125 | 56 | 24 | 12 | 215 | 14 | 180 | 8 | 140 | 7 | 27 | 10 | 90 |
| АИР90LА(В) Е (Е2) | 420 | 250 | 250 | 50,0 | 125 | 56 | 24 | 12 | 215 | 14 | 180 | 8 | 140 | 7 | 27 | 10 | 90 |
| АИР100S Е (Е2) | 457 | 270 | 250 | 60 | 112 | 63 | 28 | 12 | 215 | 14 | 180 | 8 | 160 | 7 | 31 | 14 | 100 |
| АИР100L E (Е2) | 457 | 265 | 250 | 60 | 140 | 63 | 28 | 12 | 215 | 14 | 180 | 8 | 160 | 7 | 31 | 13 | 100 |
| АИР112М Е (Е2) | 508 | 270 | 300 | 80 | 140 | 70 | 32 | 12 | 265 | 15 | 230 | 10 | 190 | 8 | 35 | 14 | 112 |
| АИР112МА(В) Е (Е2) | 545 | 290 | 300 | 80 | 140 | 70 | 32 | 12 | 265 | 14 | 230 | 10 | 190 | 8 | 35 | 14 | 112 |
| АИР132S Е (Е2) | 588 | 345 | 350 | 80 | 140 | 89 | 38 | 12 | 300 | 19 | 250 | 10 | 216 | 8 | 41 | 15 | 132 |
| АИР132М Е (Е2) | 588 | 330 | 350 | 80 | 178 | 89 | 38 | 12 | 300 | 19 | 250 | 10 | 216 | 8 | 41 | 18 | 132 |
| АИР160S2Е (Е2) | 703 | 420 | 350 | 110 | 178 | 108 | 42 | 15 | 300 | 19 | 250 | 12 | 254 | 8 | 45 | 20 | 160 |
| АИР160М2Е (Е2) | 773 | 420 | 350 | 110 | 210 | 108 | 42 | 15 | 300 | 19 | 250 | 12 | 254 | 8 | 45 | 20 | 160 |
| АИР160S4,6,8Е (Е2) | 718 | 420 | 350 | 110 | 178 | 108 | 48 | 15 | 300 | 19 | 250 | 14 | 254 | 9 | 51,5 | 20 | 160 |
| АИР160М4,6,8Е (Е2) | 773 | 420 | 350 | 110 | 210 | 108 | 48 | 15 | 300 | 19 | 250 | 14 | 254 | 9 | 51,5 | 20 | 160 |
| АИР180S2Е (Е2) | 820 | 455 | 400 | 110 | 203 | 121 | 48 | 15 | 350 | 19 | 300 | 14 | 279 | 9 | 51,5 | 22 | 180 |
| АИР180М2Е (Е2) | 870 | 445 | 400 | 110 | 241 | 121 | 48 | 15 | 350 | 19 | 300 | 14 | 279 | 9 | 51,5 | 22 | 180 |
| АИР180S4,69,8Е (Е2) | 850 | 455 | 400 | 110 | 203 | 121 | 55 | 15 | 350 | 19 | 300 | 16 | 279 | 10 | 59 | 22 | 180 |
| АИР180М4,6,8Е (Е2) | 870 | 455 | 400 | 110 | 241 | 121 | 55 | 15 | 350 | 19 | 300 | 16 | 279 | 10 | 59 | 22 | 180 |
| АИР200М2Е (Е2) | 930 | 505 | 450 | 110 | 267 | 133 | 55 | 19 | 400 | 19 | 350 | 16 | 318 | 10 | 59 | 25 | 200 |
| АИР200L2Е (Е2) | 940 | 510 | 450 | 110 | 305 | 133 | 55 | 19 | 400 | 19 | 350 | 16 | 318 | 10 | 59 | 25 | 200 |
| АИР200М4,6,8Е (Е2) | 970 | 500 | 450 | 140 | 267 | 133 | 60 | 19 | 400 | 19 | 350 | 18 | 318 | 11 | 64 | 25 | 200 |
| АИР200L4,6,8Е (Е2) | 970 | 510 | 450 | 140 | 305 | 133 | 60 | 19 | 400 | 19 | 350 | 18 | 318 | 11 | 64 | 25 | 200 |
| АИР225М2Е (Е2) | 985 | 550 | 550 | 110 | 311 | 149 | 55 | 19 | 500 | 19 | 450 | 16 | 356 | 10 | 25 | 225 | |
| АИР225М4,6,8Е (Е2) | 985 | 550 | 550 | 140 | 311 | 149 | 65 | 19 | 500 | 19 | 450 | 18 | 356 | 11 | 25 | 225 | |
| АИР250S2Е (Е2) | 1080 | 610 | 550 | 140 | 311 | 168 | 65 | 24 | 500 | 19 | 450 | 18 | 406 | 11 | 32 | 250 | |
| АИР250S4,6,8Е (Е2) | 1080 | 610 | 550 | 140 | 311 | 168 | 75 | 24 | 500 | 19 | 450 | 20 | 406 | 12 | 32 | 250 | |
| АИР250М2Е (Е2) | 1080 | 610 | 550 | 140 | 349 | 168 | 65 | 24 | 500 | 19 | 450 | 18 | 406 | 11 | 32 | 250 | |
| АИР250М4,6,8Е (Е2) | 1080 | 610 | 550 | 140 | 349 | 168 | 75 | 24 | 500 | 19 | 450 | 20 | 406 | 12 | 32 | 250 | |
| АИР280S2Е (Е2) | 1310 | 660 | 660 | 140 | 368 | 190 | 70 | 24 | 600 | 24 | 550 | 20 | 457 | 11 | 32 | 280 | |
| АИР280S4,6,8,10Е (Е2) | 1340 | 660 | 660 | 170 | 368 | 190 | 80 | 24 | 600 | 24 | 550 | 22 | 457 | 12 | 32 | 280 | |
| АИР280М2Е (Е2) | 1350 | 660 | 660 | 140 | 419 | 190 | 70 | 24 | 600 | 24 | 550 | 20 | 457 | 12 | 30 | 280 | |
| АИР280М4,6,8,10Е (Е2) | 1380 | 610 | 650 | 170 | 419 | 190 | 80 | 24 | 600 | 24 | 550 | 22 | 457 | 14 | 30 | 280 | |
| АИР315S2Е (Е2) | 1510 | 865 | 660 | 140 | 406 | 216 | 75 | 28 | 600 | 24 | 550 | 20 | 508 | 12 | 44 | 315 | |
| АИР315S4,6,8,10,12Е (Е2) | 1510 | 865 | 660 | 170 | 406 | 216 | 90 | 28 | 600 | 24 | 550 | 25 | 508 | 14 | 46 | 315 | |
| АИР315М2Е (Е2) | 1510 | 865 | 660 | 140 | 457 | 216 | 75 | 28 | 600 | 24 | 550 | 20 | 508 | 12 | 46 | 315 | |
| АИР315М4,6,8,10,12Е (Е2) | 1510 | 865 | 660 | 170 | 457 | 216 | 90 | 28 | 600 | 24 | 550 | 25 | 508 | 14 | 46 | 315 | |
| АИР355S4,6,8,10,12Е (Е2) | 1010 | 800 | 210 | 500 | 254 | 100 | 28 | 740 | 24 | 680 | 28 | 610 | 16 | 52 | 355 | ||
| АИР355М4,6,8,10,12Е (Е2) | 1010 | 800 | 210 | 560 | 254 | 100 | 28 | 740 | 24 | 680 | 28 | 610 | 16 | 52 | 355 |
Создать учетную запись
Зарегистрируйте новую учётную запись в нашем сообществе. Это очень просто!
Возможные схемы подключения электромагнитного тормоза
Переменный ток.
По переменному току следует подключать электромагнитный тормоз, когда время срабатывания не имеет значения. При отключении напряжения из-за возникающего магнитного поля, ток катушки уменьшается медленно. Магнитное поле снижается постепенно, что приводит к замедленному росту тормозного момента и к длительному времени срабатывания тормоза.
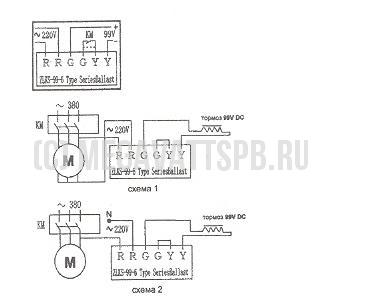
Подключение электромагнитного тормоза 220В по переменному току к сети 380В.
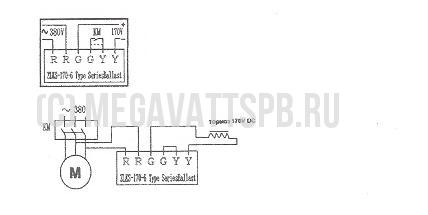
Подключение электромагнитного тормоза 380В по переменному току к сети 380В.
Постоянный ток.
Для уменьшения времени растормаживания и торможения двигателя нужно разъединять цепь питания по стороне постоянного тока, подсоединяя выводы на свободную пару нормально разомкнутых контактов пускателя электродвигателя. Этот способ можно применять везде, где необходимо большое количество срабатываний и точное позиционирование привода. При таком подключении ток катушки прерывается между катушкой и выпрямителем. Магнитное поле снижается очень быстро, что приводит к быстрому увеличению тормозного момента и малому времени срабатывания тормоза.
Необходимо предусмотреть защиту от искрения, потому что при этом способе подключения образуется высокое напряжение выброса и контакты катушки быстро изнашиваются.
Подключение электромагнитного тормоза 220В по постоянному току к сети 380В.
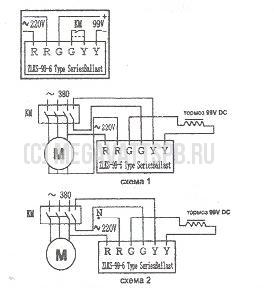
Подключение электромагнитного тормоза 380В по постоянному току к сети 380В.
При заказе электродвигателя с тормозным механизмом необходимо уточнить нужно ли ручное растормаживание, зависимое или независимое питание должно быть у тормоза, 220В или 380В.
Если у Вас не получилось найти тут нужный Вам двигатель с тормозом, возможно Вам подойдет импортный электродвигатель с тормозом по стандарту DIN
Цену, наличие или сроки поставки, а также любую необходимую информацию можно уточнить у наших менеджеров!
Мы работаем только с юридическими лицами РФ
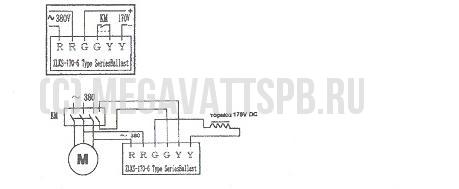
Новое поколение систем питания тормозов постоянного тока
Система PS–1 была построена на базе техники полупроводников типа MOSFET, что позволило получить эффекты, недостижимые в традиционных решениях. Электромагнит тормоза, питаемый посредством системы такой же конструкции, позволяет получить тормозом параметры времени включения и отключения аналогичные в случае прерывания контура по стороне постоянного тока. Полученные параметры однако не требуют применения дополнительных электрических контуров и выключателей.
Простота монтажа и получаемые параметры обеспечивают очень широкое применение, особенно там, где требуется позиционирование приводов, работа с большой частотой соединений, обусловленная повторяемостью времени включения и отключения тормозов.
Система питания PS–1 представляет собой готовый узел для непосредственного монтажа. Оснащенная в 4-ех зажимную планку позволяет на свободное приспособление в каждом совместно работающем контуре. Система приспособлена для питания из источника переменного тока величиной 380 — 400VAC, макс. 420VAC, что после выпрямления и соответствующего сформирования позволяет получить постоянное напряжение величиной 170-180VDC для питания тормоза.
Прилагаемая ниже схема представляет способ включения системы PS-1 в контур питания тормоза совместно работающего с электродвигателем 3x380VAC с обмоткой соединенной в звезду.
Система PS-1
Электромагнит тормоза, питаемый выпрямителем такой конструкции, позволяет получить такие же параметры времени включения и выключения, как и в случае прерывания контура традиционным выпрямителем при постоянном токе. Полученные параметры однако не требуют применения дополнительных электрических контуров и выключателей.
Это обеспечивает очень широкое применение, особенно там, где требуется позиционирование приводов, работа с большой частотой соединений, обусловленная повторяемостью времени включения и отключения тормозов.
Система питания PS–1 представляет собой готовый узел для непосредственного монтажа. Выпрямитель принимает входное напряжение 220 — 230 VAC, макс. 250 VAC, что после выпрямления дает постоянное напряжение величиной 190-205 VDC.
Представленные выше конструкционные решения тормозов и самотормозящих электродвигателей не исчерпывают всех решений узла: двигатель — тормоз. В настоящем мы сконцентрировались направленные на представлении основного офертного предложения и применения, связанного с их питанием. Здесь мы представили лишь существо решений, применяемых обычно в нашей фирме.
Кол-во блоков: 8 | Общее кол-во символов: 11551
Количество использованных доноров: 4
Информация по каждому донору:
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
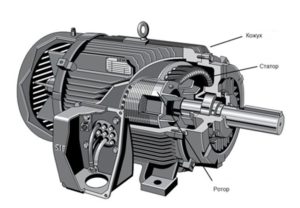
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
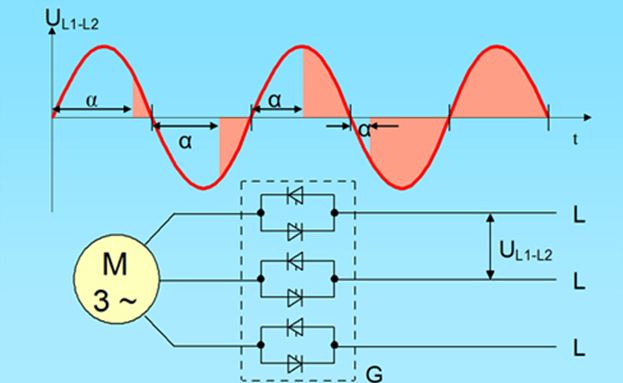
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
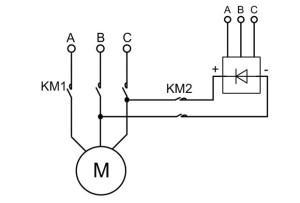
Классическая схема, как можно видеть на иллюстрации, предусматривает отключение от сети одной фазы контактором КМ1. При этом две другие фазы за счет контактора КМ2 переключаются в цепь с постоянным током через диодный мост.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Виды динамического торможения
Классическое динамическое торможение
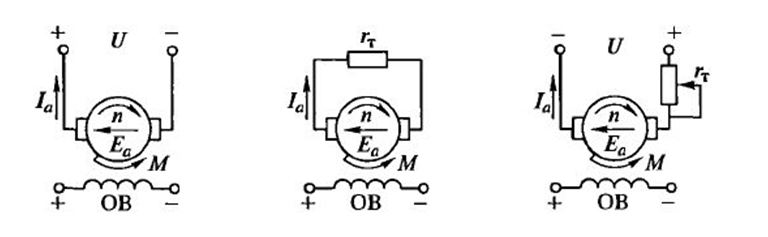
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
Рекуперативное торможение
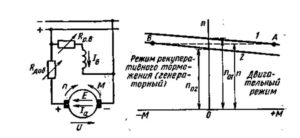
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
Торможение противовключением
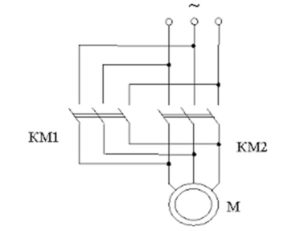
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
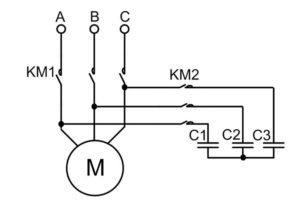
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.
Читайте также: