
Квадрокоптер своими руками
Обновлено: 08.07.2024
Привет! Давно хотел написать подобную статью с максимально подробной инструкцией как собрать квадрокоптер своими руками. Но сразу скажу, что цена такого квадрокоптера выйдет около 11 тысяч рублей. Это без учета стоимости FPV шлема, аккумуляторов, радиоаппаратуры и зарядного устройства. А полный комплект обойдется вам в примерно 21000 рублей. Подробнее о стоимости квадрокоптера можно, например, почитать здесь и здесь (окончание статьи с итогами). Сборка получилась весьма интересной, шустрой и крепкой. В общем, на текущий момент это мой любимый квадрокоптер.
Краткий обзор комплектующих.
Рама — Transtec Frog Lite II (Купить можно здесь(Aliexpress)
Моторы — Aokfly DR2205 2500kv (Покупаем здесь (Aliexpress)
Полетный контроллер Mamba F405 mini MK2 в стэке с регулятором ESC 4-в-1 (Покупал здесь (Aliexpress)
Приемник радиоаппаратуры Flysky FS-IA6B, модернизированный (добавлены каналы, уменьшен размер и добавлена функция RSSI). О том, как это сделать описано в статье про RSSI. Но я сразу вам рекомендую облегчить задачу и заказать себе что-нибудь миниатюрное типа Fli14 и будет вам счастье.
Сборка рамы.

Вот так выглядит рама нашего будущего квадрокоптера в разобранном виде (слева расположена карма квадрокоптера). Во-первых, вы должны зафиксировать все 4 луча квадрокоптера между двумя центральными пластинами. Сделайте это с помощью 8 винтов из комплекта. 4 самых близких винта проденьте шляпкой вниз и затяните обычной гайкой (капните немного синего фиксатора на резьбовое соединение), 2 крайних правых и два крайних левых (на рисунке это нижние и верхние) — шляпкой вверх и затяните гайками с пластмассовыми втулками. Этим гайкам фиксатор не нужен.
Установка моторов на раму.

Теперь надеваем защиту на лучи и распределяем моторы квадрокоптера по направлению вращения. CW — моторы с вращением по часовой стрелке, CCW — против часовой. Провода должны смотреть в сторону центра квадрокоптера вдоль лучей. Классическая схема, по которой должны вращаться моторы, указана на рисунке. Но так как мы с вами собираем квадрокоптер своими руками, то вы можете выбрать абсолютно противоположный вариант. В общем, это потом легко настраивается.
Прикручиваем их, но не забываем капать фиксатор резьбы на соединения. Винты крепления нужны с длиной резьбовой части 7 мм. Этот квадрокоптер имеет толщину лучей 4 мм, плюс защита торцов 1 мм, плюс 2 мм само соединение. Итого 7 мм.
Главное не переборщите с длиной и перед затягиванием убедитесь в том, что винт не повредит обмотку мотора.
Установка регулятора оборотов 4-в-1.


Чтобы правильно сориентировать регулятор оборотов, достаточно глянуть на обозначения номеров моторов на углах платы и надеть плату на 4 центральных винта. Контакты +/- должны оказаться сзади. Зафиксируйте плату нейлоновыми стойками, идущими в комплекте со стеком Mamba F405. Далее уже приступаем непосредственно к пайке компонентов.
Прежде чем паять моторы к регулятору, отмеряем длину проводов до ближайших 3 контактов (относительно каждого мотора/луча) с небольшим запасом, отрезаем. Зачищаем провод где то на 3 мм, лудим. Лудим все контакты на плате регулятора. Дальше припаиваем провода от моторов также как на рисунке. Провода от моторов припаиваются к трем соответствующим этому мотору площадкам в любом порядке.

К контактам +/- припаиваем коннектор XT-60 как показано на рисунке. На этом можно считать работу с силовой частью квадрокоптера завершенной.
Теперь пришло время снабдить наш квадрокоптер глазами, ушами и мозгом.
Подключение FPV системы, приемника и пищалки к полетному контроллеру квадрокоптера.
Подключение FPV камеры.

Все FPV камеры, так или иначе, практически не отличаются друг от друга способом подключения к полетному контроллеру. Чаще всего из камеры выходят 3 провода: черный — минус питания камеры (земля), красный — плюс питания камеры, желтый — видеосигнал. Теперь давайте разберем наш случай: камера Foxeer Predator 4 поддерживает напряжение питания 5-40 вольт. Наш полетный контроллер имеет на борту преобразователь напряжения на 5 и на 9 вольт. Например, будем использовать 9 вольт. Все контакты на плате Mamba F405 удобно распределены по группам для того, чтобы было легче паять (смотрите картинку). Хочу отметить, что я прежде всего припаиваю всю периферию, а уже потом устанавливаю плату на нейлоновые стойки. Делаю я так для правильной пайки. То есть, другими словами, провода продеваем в отверстия снизу, а припаиваем сверху, а не как многие блогеры, суют провод в отверстие и тут же жарят изоляцию. Дальше на фото будет видно, что я имею ввиду.
Вот мы присоединили камеру, теперь полетный контроллер уже умеет принимать сигнал от нее и накладывать различную информацию на картинку (OSD-on screen display), но еще не умеет передавать изображение в FPV очки или шлем. Для этого нужен видеопередатчик.
Подключение видеопередатчика.

Выбранный мной передатчик Foxeer Clear/ClearTX2 имеет шесть контактов.
Красный — плюс питания передатчика, черный — минус питания, зеленый — SmartAudio (позволяет управлять мощностью с пульта радиоаппаратуры), желтый — вход видеосигнала из ПК после наложения на него информации (OSD). Есть еще черный и белый провода для питания камеры, но нам они в этой сборке не нужны. Обрезаем коннектор со стороны ПК, зачищаем, лудим провода и припаиваем согласно рисунку. Все провода желательно скручивать для того, чтобы уменьшить воздействие помех от регулятора оборотов.
Подключение приемника Flysky FS-iA6b по протоколу i-bus.
Ну, вот мы и подобрались к моменту компоновки всех деталей нашего самодельного квадрокоптера.
Окончательная сборка квадрокоптера.
Буду приводить картинки и прокомментирую все дальнейшие действия, я думаю, что все будет понятно.

Теперь несколько слов о недостатках этой сборки и о том, как я вышел из данной ситуации. Главный недостаток — это размер приемника! (мне просто надо было его куда то пристроить). В самом начале статьи я рекомендовал вам выбрать миниатюрный приемник. Но даже с такими его размерами, я постарался не испортить внешний вид квадрокоптера. Я спроектировал и распечатал на 3д принтере крышку (скачать stl файл), под которую спрятал видеопередатчик. Кроме того, удобно закрепил антенну на ней. По-моему получилось неплохо…
Прошивка и настройка самодельного квадрокоптера.
Ну вот, мы своими руками собрали квадрокоптер, осталось его настроить.
Первым делом устанавливаем необходимые приложения: Betaflight Configurator и BLHeli Configurator. Первый нужен для прошивки и настройки полетного контроллера, а второй для настройки регулятора оборотов. Оба конфигуратора можно установить двумя способами: Во-первых, если у вас браузер Chrome, то их можно установить в качестве расширений для него. Во-вторых, можно установить их как отдельные приложения. Ссылки ниже:
Прошивка.
Настроим квадрокоптер своими руками.
Изменение направления вращения моторов квадрокоптера.
- Закрываем Betaflight.
- Открываем BLHeli Configurator.
- Подключаем ПК к компьютеру и жмем Connect (аккумулятор должен быть присоединен к квадрокоптеру)
- Нажимаем Read Setup, должна появиться вот такая информация
- Esc 1, Esc 2 и так далее соответствуют номерам наших моторов 1,2,3 и 4. Например, нам надо изменить направление вращения мотора №1. В выпадающем списке Motor Direction меняем значение Normal на Reversed. Теперь мотор будет крутиться в противоположную сторону. Точно так же делаем для всех моторов, которым надо изменить направление вращения.
- Жмем Write Setup. Закрываем BLHeli Configurator. В общем, вы еще раз можете проверить, все ли вы правильно сделали, в Betaflight.
Настройка радиоаппаратуры Flysky.
Как проверить, требуется ли делать реверс основных каналов в аппаратуре? ![]()




Как вы можете видеть, в моем случае ничего менять не пришлось. На этом этапе будьте аккуратны и не включите реверс третьего канала (газ). Это может привести к тому, что при включении квадрокоптера он даст газ на полную!
AUX каналы.
Под AUX каналами в радиоаппаратуре подразумевают всякие дополнительные тумблеры и крутилки, которые используют для включения различных функций, а также управляют полетными режимами квадрокоптера. У нашего приемника Flysky FS-iA6b 6 каналов. Но всего 2 дополнительных. Допустим, что у нас один дополнительный канал будет отвечать за включение пищалки (крайний левый тумблер), а второй (трехпозиционный переключатель) — за изменение полетного режима. В аппаратуре это делается так:



Здесь я тумблер пищалки (SwA) переназначил на 6 канал (AUX 2), а трехпозиционный переключатель (SwC) установил на 5 канал (AUX 1).
Таким образом, при включении левого тумблера, будет звучать сигнал зуммера. Это полезная функция, которая помогает искать квадрокоптер в траве, если тот, например, упал.
Трехпозиционный переключатель позволит нам выбрать полетный режим: выключенное состояние — Disarm (моторы остановлены), вторая позиция — Arm (Моторы вращаются) и Angle (режим стабилизации), третья позиция — Arm и Acro (акробатический режим). Про режимы я советую вам почитать статьи на просторах рунета, в рамках этой статьи невозможно передать всю информацию по этой теме.
Настройки Failsafe. Квадрокоптер своими руками.
Failsafe — это очень важная функция, миссия которой, сохранить квадрокоптер, сделанный своими руками, в случае потери связи от радиоаппаратуры, а также чужое имущество.
На стороне аппаратуры мы должны настроить Failsafe хотя бы на одном канале. Рекомендую 3 (газ):





На стороне полетного контроллера делаем точно так же, как на картинке:
Работает функция по следующему алгоритму. Например, потеряна связь, квадрокоптер на 3 секунды включает режим стабилизации, тем самым выпрямляет его, затем отключает моторы и включает зуммер (пищалку). Не игнорируйте эту настройку. А еще лучше не выходите в поле, пока не проверили работу функции дома без пропеллеров.
Настройка OSD

На этой вкладке мы долго задерживаться не будем, так как, настройка OSD — это личные предпочтения каждого пилота.
Здесь вы смело можете экспериментировать с той информацией, которую хотите видеть на экране вашего FPV шлема или очков (ставя или убирая галочки), а также с месторасположением их на картинке (просто передвигая надписи). Обычно самым важной информацией для FPV пилота квадрокоптера является израсходованная емкость аккумулятора. Зная ее, вы вовремя посадите свой квадрокоптер и сохраните и его и недешевые аккумуляторы.
Вот вроде бы и все. Перед первым запуском квадрокоптера с установленными пропеллерами, еще раз проверьте следующие моменты:
Во-первых, корректность работы каналов (особенно газа!)
Во-вторых, Failsafe! Для этого достаточно отключить аппаратуру, и посмотреть, работает ли квадрокоптер по нашему сценарию.
В-третьих, я мог, что-то упустить из виду и не описать в статье какую-нибудь мелочь. Пишите комментарии, я постараюсь быстро ответить.
UPD: Как настроить датчик тока на полетном контроллере квадрокоптера? Читайте здесь.

ВНИМАНИЕ! FPV система представляет собой такую цепочку: камера -> передатчик -> приёмник -> дисплей (очки). Все указанные на сайте комплектующие работают на частоте 5.8MGhz, то есть всё совместимо! Вот вам возможные варианты FPV наборов:
Передающие части:
● Экшн камера (SJCAM, YI, GO PRO) + специальный кабель к передатчику + передатчик (есть готовый комплект)
● FPV камера + передатчик
● FPV камера с передатчиком (Eachine TX02, с антенкой в виде гриба)
Приёмные части:
● Приёмник + дисплей 7″
● Приёмник + оцифровщик Easycap (подключается по USB к ноуту или планшету)
● FPV очки (имеют встроенный приёмник. )
NTSC или PAL? PAL – частота кадров (строк) выше, но разрешение ниже, разница конечно минимальна. Ну и у нас PAL в стране – лампочки вечером не будут мерцать и бесить.
RunCam Split 4

Курсовая камера + запись 4К на карту памяти!
Eachine TX06

Камера 700TVL + передатчик 5.8
Foxeer Razer

Одна камера – куча вариантов. OSD на борту
RunCam Phoenix 2

Caddx Ratel 2

1200TVL, OSD на борту
EKEN H9

Самая дешёвая экшн-камера
Eachine TX805

Eachine TX526

Дисплей

Дисплей

OTG FPV

Приёмник для смартфона
Антенна “леденец”

Новый тип антенн под 5.8
Eachine EV800

Самый дешёвый шлем
Eachine EV800D

Eachine EV100

Самые дешёвые очки
Eachine EV300D

Более дорогие очки
Fat Shark Attitude V6

ПОЛЁТНЫЕ КОНТРОЛЛЕРЫ
APM2.8

Наборы

Pixhawk

ВИДЕО
СОВЕТЫ ПО СБОРКЕ
ВАЖНОЕ
1. Во время калибровки регуляторов ПРОПЕЛЛЕРЫ ДОЛЖНЫ БЫТЬ СНЯТЫ, иначе можно порубиться в капусту
2. Перед включением очков, шлема и передатчика видео АНТЕННА ДОЛЖНА БЫТЬ УСТАНОВЛЕНА, иначе сгорит электроника
СБОРКА РАМЫ И УСТАНОВКА ЭЛЕКТРОНИКИ
1. Используйте синий фиксатор резьбы для сборки резьбовых соединений рамы. Без него – может открутиться.
1.1 Если взять красный – конструкция получится неразборная.
1.2 Старайтесь наносить фиксатор на винт, а не на гайку.
2. Крепите регуляторы к лучам на двусторонний скотч и изоленту.
3. Провода между камерой и передатчиком скрутите в тугую косичку.
3.1 Косичка должна быть не параллельна и не перпендикулярна сигнальным проводам от регуляторов и проводам от RC приёмника.
4. RC приёмник желательно вытащить из корпуса, припаять к полётному контроллеру, и отрезать лишние ноги.
4.1 Желательно купить микро версию приёмника, она меньше и легче
4.2 Если у вашего RC приёмника 2 антенны, то они должны быть расположены под 90 градусов друг к другу, и по 45 градусов к горизонту.
5. Между рамой и аккумулятором желательно добавить нескользящую прокладку, например кусочек резины или вспененной китайской упаковки. Либо ленту – липучку.
5.1 Балансировочный шлейф крепите либо лентой прямо вместе с аккумулятором, либо используйте крепление этого шлейфа на основных проводах от аккумулятора.
6. Коннектор аккумулятора желательно припаивать не напрямую в плату распределения питания, а на отрезках ТОЛСТОГО провода длиной 2-3 см. Это упростит подключение/отключение аккумулятора, и уменьшит шанс поломки платы распределения при падении.
7. Докупите грибовидные антенны для FPV, вход: RP-SMA male
8. Курсовая FPV камера в пластиковом корпусе гораздо легче, чем камера в металлическом. Но если вы учитесь летать и боитесь убить камеру, то лучше взять металлическую.
9. HD камера необязательна, просто летать можно и без неё. Она нужна для записи красивых видосов.
10. Для съёмки используйте “новый” и сбалансированный комплект пропеллеров, чтобы на камере не были видны вибрации и “кисель”. Для обычных полетушек годятся поцарапанные и имеющие вмятины пропеллеры.
ПОДКЛЮЧЕНИЕ И ЗАЩИТА ЭЛЕКТРОНИКИ
1. Для защиты электроники от влаги используйте электроизоляционный лак Plastic 71. Наносить в 3 слоя с просушкой в 1 час.
1.1 Качество нанесения защитного покрытия можно контролировать под УФ лампой
2. Провода от моторов (3 штуки) паяйте напрямую к регуляторам, отпаяв родные провода от регуляторов.
3.1 Сделайте это до того, как покрывать плату регулятора лаком.
4. Сигнальные провода от регуляторов к контроллеру паяются в следующем порядке: задний правый, передний правый, задний левый, передний левый.
4.1 Если ваши регуляторы поддерживают DSHOT, чёрные сигнальные провода можно отрезать. Если только OneShot или MultiShot, то делать этого нельзя.
4.2 Земля и сигнальный провод должны быть скручены в косичку. Если у вашего регулятора они идут в виде плоского шлейфа – разъедините их, и скрутите в косичку.
5. Припаяйте танталовый конденсатор с напряжением минимум 6.3 В и ёмкостью 10 – 50 мкФ на шину питания полётного контроллера.
6. Пищалку можно достать из компьютера.
7. Барометр нужно защитить чёрным поролоном. Да-да, именно чёрным.
8. Залейте ноги матрицы FPV камеры эпоксидкой.
9. Запеньте монтажной пеной внутреннюю полость FPV антенны.
10. Залейте эпоксидкой светодиодные панели.
ЗАРЯДКА АККУМУЛЯТОРОВ
Аккумуляторы (грубо) имеют следующие характеристики: напряжение, ёмкость, ток заряда, ток разряда. Напряжение пишется в Вольтах, но по хорошему напряжение определяет число банок S. S (англ. “Series” – последовательный) определяет число ячеек (банок) в аккумуляторе, соединённых последовательно. Напряжение одной ячейки лития составляет 3.7 В (3 В минимум, 4.2 В максимум). Таким образом параметр S определяет диапазон напряжений, в которых работает ваша сборка. В умных зарядниках типа IMAX B6 при зарядке выставляется именно число банок S, напряжение зарядник определит сам. Ещё есть индекс P (англ. “Parallel” – параллельный), обозначающий число банок, соединённых параллельно. Например код 3S2P означает, что аккумулятор состоит из 6 банок, 3 сборки последовательно по 2 параллельно соединённых аккумулятора.
Зарядный и разрядный токи напрямую зависят от ёмкости аккумулятора, и связаны через параметр С – токоотдача (токоприём). Чтобы перевести ёмкость в Амперы, нужно ёмкость в Ампер*часах умножить на токоотдачу. Например на аккумуляторе вы можете прочитать 1300 mah 70 С, то есть это 1.3 Ампер часа * 70 = 91 Ампер. Это максимальный ток, который можно снять с аккумулятора без вреда для него. Параметр очень важный, например при проектировании коптера нужно брать акум, который сможет отдать ток, равный сумме максимальных токов через регуляторы оборотов. Например есть 4 регулятора по 25 А каждый, значит суммарный ток 100 А. Хотим акум ёмкостью 3500. 100 / 3,5 = 28, округляем в большую сторону => 30. Нужен акум с ёмкостью 3500 mah и отдачей 30 С. В характеристиках акума токоотдача называется Discharge Rate.
Зарядный ток для обычных LiPo аккумуляторов не должен превышать 1 С, то есть быть меньше или равным ёмкость аккумулятора в Ампер*часах. При токе в 1 С аккумулятор зарядится за 1 час. То есть наш аккумулятор из предыдущего примера можно заряжать током 3,5 А максимум. Можно 1 А, 2 А, 3 А, но вот 4 А уже не рекомендуется. Сейчас есть мощные модификации LiPo аккумуляторов, например графеновые (Infinity RC Graphene). У них в характеристиках можно найти строчку Charge Max Rate: 5C, то есть заряжать можно током, в 5 раз превышающим ёмкость! А это значит, что акум зарядится за 1/5 часа, то есть за 12 минут! Но зарядник и БП такой мощности ещё нужно поискать (пример: гоночный акум из моего видео 1300 mah, заряжать можно током 6.5 А). В зарядниках типа IMAX B6 зарядный ток ставится вручную, и не должен превышать допустимого для аккумулятора, а также мощность (напряжение * ток) не должна превышать мощность вашего БП, иначе будет ошибка.
Что касается хранения аккумуляторов: у меня на канале есть видео “советы по использованию литиевых аккумуляторов”, вот информация оттуда подходит. Основные моменты:
На сегодняшний день различные технические приспособления прочно вошли в нашу жизнь и стали неотъемлемой ее частью. То, что еще недавно казалось фантастическим, сегодня уже является реальностью и меняет ее. Одним из наиболее востребованных устройств являются квадрокоптеры.
Квадрокоптер или дрон используется в различных сферах начиная от доставки посылок и заканчивая военным сектором. Сегодня попытаемся разобраться, как сделать квадрокоптер своими руками в домашних условиях пошагово из подручных материалов.


Необходимые детали
Чтобы собрать мощный самодельный коптер для дальних полетов с нуля, потребуется иметь определенный комплект элементов. Это:
- рама и материалы для ее сборки;
- пропеллер;
- пульт, а также приемник для сигнала от пульта;
- двигатель;
- камера;
- контроллер;
- регуляторы оборотов;
- набор вспомогательных запчастей;
- схема самого квадрокоптера.




Рама и ее комплектующие
Чтобы наш дрон летал надежно, следует понимать, что его рама должна быть максимально крепкой и качественной. Тут еще многое будет зависеть от того, для каких целей будет он использоваться. Если требуется грузовой с подъемом 200 кг, то раму делаем максимально прочной из соответствующих материалов. Если это будет простой спортивный квадрокоптер, то можно облегчить его вес.


А если требуется сделать большой гибридный дрон, скажем, для съемки, но который можно переоборудовать под грузовой, то потребуется выбрать другие материалы для рамы.
Существует два варианта решения данного вопроса:
- выбор готовой рамы;
- собственноручно сделанное основание для квадрокоптера.
Тут тоже присутствует ряд нюансов. Если купить уже готовое решение, то чаще всего на такую раму просто остается прикрутить другие необходимые части – и можно производить запуск дрона. Но если определенная деталь получила повреждения при падении либо неаккуратном использовании, и требуется ее замена, то надо будет ждать, пока заказанная вами запчасть будет привезена, и вы ее замените.


Если говорить о сборке рамы своими руками из подручных средств, то тут потребуется осторожно вырезать необходимые элементы и прикрепить их друг к другу. Если же произойдет что-то непредвиденное, то сломанную часть можно будет просто поменять на новую.
Учитывая, что многие отдают предпочтение раме, собранной именно самостоятельно, то лучше всего для ее создания подойдут трубы, выполненные из пластика. Их обычно применяют при создании каналов для кабелей. Характеристики таких труб отлично подойдут для крепления всех нужных частей управления и моторов.
Для закрепления моторов можно применить крепления, применяющиеся для закрепления труб на стенах при прокладывании кабелей.
Они являются настолько хорошим решением для квадрокоптера, что можно не бояться прикреплять на них не только детали дрона, но и камеру.
Мотор
Есть 2 категории двигателей, что применяются в данном случае:


Обычно применяется второй тип моторов, что позволяет быстро реагировать на изменения в оборотах и крутящем моменте. Чтобы использовать такой мотор, потребуется оснастить его специальным электрорегулятором скорости. Какой-либо другой вид двигателя, скажем, бензиновый, здесь использовать нельзя.
Размер этих устройств обычно обозначается неким 4-значным числом, где первые 2 цифры будут означать статорную ширину, а оставшиеся – высоту или его диаметр. То есть, например, имеется статор модели Racestar BR2205 – значит, он будет иметь размер 22 миллиметра и 5-миллиметровую высоту. Добавим, что чем выше статор, тем более высоких оборотов будет его мощность. А чем больше его ширина, тем больше будет крутящий момент при более низких оборотах.
Важным при выборе мотора будет значение KV, что означает скорость вращения двигателя при подаче 1 вольта на обмотку.
Определение значения будет осуществляться по количеству обмоток провода меди в моторном статоре и соответствующей силой магнитов. Данный параметр определяет, какого типа винт можно применять с тем или иным двигателем.


Пропеллер
Если говорить о пропеллерах, то они осуществляют трансформацию механической энергии моторов в тягу. Крайне важными его характеристиками будут размер и форма. Они делаются из различных материалов, среди которых можно назвать дерево, углеродное волокно и пластиковый композит. Каждый из упомянутых материалов имеет свои уникальные свойства, благодаря чему квадрокоптер получает те или иные преимущества. Но наиболее распространены винты из пластиковых композитов. Ряд пользователей иногда берут нужные элементы от кулеров.



Размер детали, которую можно установить на ту или иную модель дрона, ограничен размерами рамы и мощностью мотора. Обычно чем больше пропеллер можно применить для создания конкретной тяги, тем его эффективность будет выше. Для мини-дронов можно использовать 5- или 6-дюймовые винты с шагом до 5 дюймов.
Количество лопастей будет оказывать влияние на тягу и расходование энергии. Чем их будет больше, тем выше будут эти показатели.
Пульт и приемник
Пульт обязательно нужно приобретать вместе с приемником сигнала. Тогда вы будете уверены, что приемник будет производить прием именно сигнала, что послан с пульта.
Хорошие модели будут стоить от 1000 рублей и более, но их радиус действия будет больше, чем у более дешевых.
На пультах часто располагается масса ненужных переключателей, которые просто путают пользователя. Такие модели лучше не приобретать.

Батарея
На сегодняшний день для питания квадрокоптеров используются литий-полимерные решения. Именно они вместе с мотором и ESC образовывают механизм энергопитания дрона. Такие аккумуляторы выглядят как набор ячеек, каждая из которых имеет напряжение 3,7 вольта. Если нужно большее напряжение, то ячейки могут соединяться последовательно, чтобы создался единый аккумулятор. Присутствует ли такая возможность в том или ином типе аккумуляторов, можно понять по наличию буквы S или P в маркировке. Если присутствует S, то речь идет о последовательном соединении, а если P, то параллельно. Чем больше ячеек имеет батарея, тем больше ее емкость.


Регуляторы оборотов
Данный элемент характеризуется моторными витками, мощностью, наличием или отсутствием реверса, сопротивлением внутреннего типа, а также точностью работы. Лучше всего приобретать моторы с контроллерами. В противном случае придется искать специальные регуляторы оборотов для определенного двигателя.
Камера
Если говорить о камере, то к ее выбору следует подойти максимально ответственно. Для записи можно применять экшн-камеры по типу GoPro. А вообще, потребуется ориентироваться на ее угол обзора и массу. Особенно интересной ситуация будет с углом обзора. Хочется же, чтобы камера снимала все, но не коптерные лучи. И чтобы этого не было, придется или ее опускать, или выносить вперед.
Если ее опускать, то делать это потребуется сильно, что может стать причиной проблем с посадкой, взлетом и маневренностью из-за смещения центра тяжести.
Если камеру выносить вперед, то это также сместит его, либо придумывать крепкий фиксатор. В общем, к выбору камеры следует подходить максимально ответственно.


Китайские детали
Если собрались приобретать детали для квадрокоптера или дрона в Китае, то следует знать, что китайцы часто завышают характеристики различных деталей. По этой причине следует быть крайне осторожным в выборе различных комплектующих, чтобы их характеристики отвечали требованиям, которые заложены в проект интересующего вас квадрокоптера. В этом вопросе вы будете делать все, с большой долей вероятности, на свой страх и риск.
Контроллер
Контроллер можно использовать либо универсальный, либо специализированный вариант. Первый тип можно применять буквально с любым типом дронов, ведь он не заточен под управление чем-либо конкретным. На него можно повесить много оборудования, и он оснащен массой датчиков, а также имеет много различных функций. Но у него есть недостатки, а именно: высокая стоимость и необходимость его настройки. Для этого потребуется иметь специальное программное обеспечение, сделанное для конкретного контроллера.
Там можно произвести любые регулировки, но для этого потребуются силы, определенные знания и время.
А вот специализированная модель создана для конкретного устройства. Конечно, это дает определенное пространство для маневра, но все же точность настроек будет тут меньше, нежели в универсальном аналоге. Стоит такой контроллер немного, но и имеет он не слишком большое количество функций.
Сборка
Приведем подробную инструкцию, как осуществляется сборка.
Настройка
Теперь необходимо произвести настройку квадрокоптера, чтобы уже при первом полете он случайно не разбился или не вышел из строя.
- Для начала требуется произвести запуск моторов. Тут бывает по-разному, поэтому лучше сначала ознакомиться с документацией к двигателям.
- Нажимаем на газ и наблюдаем, куда крутятся винты. Они должны вертеться именно по схеме, что идет в комплекте с контроллером. Если они крутятся в противоположном направлении, то это будет означать инверсию управления. Если что-то идет не так, как требуется, следует перевернуть коннектор, объединяющий мотор с контроллером.
- Если все работает, как требуется, то теперь следует прикрутить верхнюю часть рамы. Тут нужно быть предельно осторожным и не пробовать втолкнуть ее туда. Если она встала очень туго, следует обратить внимание на крепления, ослабить болты снизу, после чего затянуть все осторожно.
- Производим закрепление блока с батареями, осуществляем монтаж пропеллерных адаптеров на моторы.
- Осуществляем монтаж пропеллеров, принимая во внимание вращательную сторону. Приподнятая часть лопасти должна смотреть туда, куда производится вращение.


На этом настройка дрона будет закончена, и квадрокоптер будет готов к первому полету.
Рекомендации
Если говорить о рекомендациях, которые можно дать по сборке рассматриваемого устройства собственноручно, то тут следует все рассчитать максимально точно, если вы решили собирать устройство сами. Размеры всех деталей должны быть правильными, чтобы одна часть не мешала другой и не нарушала работу всего квадрокоптера.
А также не будет лишним обзавестись максимально подробной и четкой схемой и инструкцией по сборке дрона, чтобы устройство функционировало, действительно, так, как требуется.
Кроме того, следует серьезное внимание уделить подбору комплектующих, чтобы они максимально подходили и были высокого качества для повышения долговечности дрона. Особое внимание требуется также уделить аккумуляторам, которые должны быть довольно емкими для того, чтобы устройство могло максимально длительно находиться в воздухе на одном заряде аккумуляторной батареи.
О том, как сделать квадрокоптер своими руками, смотрите далее.
Квадрокоптер – современное устройство, активно использующееся в качестве развлечения и для удовлетворения профессиональных потребностей. Вниманию потребителей представлено множество различных моделей. Многие любители электроники предпочитают дроны, собранные самостоятельно.
Сборка стандартного квадрокоптера стоит примерно от 20000 рублей. Если речь идет об устройстве с дополнительными опциями, цена прибора возрастет в несколько раз.
Процесс сборки потребует от конструктора наличия определенных знаний и навыков.

схема квадрокоптера в деталях
Особенности процесса сборки
Для того чтобы собранный в домашних условиях квадрокоптер долгое время радовал владельца, важно обратить внимание на элементы, влияющие на функционал прибора.
Квадрокоптер состоит из нижеперечисленных обязательных элементов:

Стоимость детали варьируется от 1 500 до 15 000 рублей. Выбор напрямую зависит от предназначения устройства. Производители предлагают несколько вариантов: три-, квадро-, гекса-, октокоптерные рамы. При длительной эксплуатации рекомендуется выбирать гексакоптер, гарантирующий стабильную работу устройства при поломке двигателя. Для беспилотников с большой массой следует приобрести октокоптер. Квадрокоптерная рама самая популярная среди вышеперечисленных, что обусловлено доступной стоимостью детали. Именно квадрокоптер мы и рассматриваем в нашем примере.
Двигатель

мотор квадрокоптера лучше выбирать безколлекторный
Цена в разных магазинах достигает 7 500 рублей и напрямую зависит от уровня качества. Число двигателей выбирается в соответствии с типом квадрокоптера: варьируется от 3 до 8 штук. Рекомендуется выбирать безколлекторные двигатели, главными преимуществами которых является длительность эксплуатационного периода, стойкость к внешним фактором.
Давайте посмотрим, как можно собрать дрон из простых материалов, например из бытовых сантехнических труб:

ESC – Electronic Speed Controller или регулятор скорости вращения двигателей. Обязательная деталь стоимостью примерно 3 700 рублей. Число ESC точно совпадает с количеством установленных моторов. Как правило, производители предлагают приобрести сразу комплект деталей.
Полётный контроллер
Деталь отвечает за процесс управление квадрокоптером и во время запуска, и во время полета. Цена устройства может меняться в зависимости от качества и технических особенностей.
Передатчик и приемник
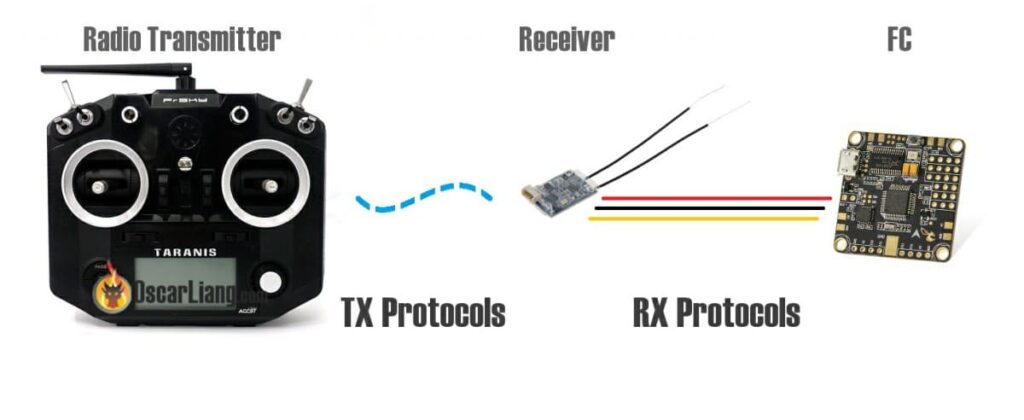
схема радиопередатчик – приемник – полетный контроллер
Деталь необходима обмена оперативной информацией. Особенно важно для большей функциональности и производительности коптера. Стоимость меняется в разные стороны в зависимости от качества детали. Выбор модели передатчика зависит от того, для каких целей будет использовать дрон.
Пропеллеры
Количество пропеллеров зависит от типа беспилотника. Этим следует руководствоваться, выбирая конкретную модель. Важно обратить внимание и на длину лопастей: меньшие отлично подойдут для быстрого набора или снижения скорости, большие же продлят полет дрона и обеспечат стабильность его нахождения в воздухе. Стоимость зависит от материала, из которого изготовлены лопасти. Пропеллер – достаточно хрупкая деталь, рекомендуется приобрести сразу несколько дополнительных.
Защита пропеллера

пропеллеры с зашитой
Важный аксессуар, являющийся гарантом безопасности и долговечности прибора. Установка защиты позволит предотвратить застревание квадрокоптера и снизит вероятность поломки в процессе эксплуатации.
Аккумулятор

Факторы, влияющие на стоимость квадрокоптера
Несмотря на то, что детали устройства делятся на необходимые и дополнительные, общая стоимость квадрокоптера может быть несколько больше, чем ожидалось изначально. Это зависит от установки дополнительного оборудования, которое не только влияет на финансовую составляющую, но и на функционал, и на производительность, и на внешний вид.
Среди таких аксессуаров можно отметить:

Продлит срок службы квадрокоптера, в который вложено большое количество сил и финансов. Стоимость чехлов варьируется в диапазоне от 1 000 до 8 000 рублей, рюкзак обойдется несколько дороже: стартовая цена – 8 500 рублей. Затраты могут увеличиться при покупке дополнительной амортизации. Однако, такие вложения станут гарантом высокого уровня защиты прибора.
Одно из значительных и важных дополнений, делающее пользование беспилотником более увлекательным процессом и позволяющее запечатлеть самые яркие моменты полета. Достаточно дорогой аксессуар, стоимость которого напрямую зависит от качества и технических характеристик.

Устанавливается при работе с камерой: снимки будут более четкими и качественными, поскольку фокус выравнивается по линии горизонта. Стоимость варьируется в диапазоне от 700 до 6 000 рублей: это зависит от тех функций, которыми обладает аксессуар. Главное условие, которому должен отвечать прибор – совместимость с камерой и самим дроном.
Если владелец дрона предпочитает использовать камеру или звукозаписывающее устройство во время полета, фиксируя все живописные места, дополнительная память категорически необходима. Цена карты варьируется в зависимости от доступного на ней пространства: в среднем, хватает 8 ГБ. Цена карт памяти напрямую зависит от ее объема.
Светодиоды придадут устройству оригинальный внешний вид, облегчат процесс наблюдения за дроном, что особенно важно в темное время суток или во время полетов на большой высоте.
Преимущества и недостатки самостоятельной сборки дрона
Главным преимуществом сбора дрона является возможность самостоятельно модернизировать устройство в соответствии с личными предпочтениями и техническими требованиями.
Самостоятельное создание беспилотника – бесценный опыт. Но следует знать и отрицательные моменты до закупки деталей:
- Отсутствие гарантий. При покупке устройства в магазине у владельца есть гарантийный талон, на основании которого можно потребовать заменить оборудование в случае поломки. При самостоятельной сборке такой возможности не будет. Кроме того, нет гарантии, что прибор будет также легко и плавно перемещаться по воздуху, как тот, что был куплен в магазине.
- Финансовые затраты. Несмотря на то, что можно собрать дрон из бюджетных деталей, создание качественного оборудования обойдется достаточно дорого.
- Количество потраченного времени. Процесс сборки гораздо длительнее, чем просто покупка. Кроме того, перспектива его бесперебойной работы туманна.
Сборка квадрокоптера – ответственный процесс, требующий сосредоточенности и внимания. Придется учесть огромное количество нюансов, просчитать стоимость каждого элемента и определиться с причиной конкретного выбора. Необходимые определенные технические знания, без которых создание квадрокоптера практически невозможно. Терпение и разочарования – главные составляющие процесса сборки, которые могут постигнуть конструктора в моменты сборки дрона и его запуска.
Каждому, кто желает стать обладателем исправного дрона и сразу же запустить его в воздух, не тратя время на самостоятельную сборку, рекомендуется отказаться от самостоятельного создания прибора и купить готовое устройство в магазине. К примеру , на нашем сайте представлен рейтинг 12 лучших моделей квадрокоптеров с качественной камерой.
Однако, если же желание собрать квадрокоптер осознанное, следует внимательно изучить рынок и приобрести все необходимые детали, после чего можно сразу приступать к работе.
Читайте также: