
Квадрокоптер из кулеров своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
Как уже замечал автор, управление тягой моторов осуществляется специальным микроконтроллером, который обрабатывает показания датчиков наклона и ускорения. Количество датчиков зависит от того, насколько автономной планируется система квадрокоптер – пилот.
Давайте рассмотрим основные составные части части квадрокоптера:
- Рама – основа всей конструкции, которая соединяет между собой все остальные части. Должна быть прочной и в то же время легкой.
- Двигатели, которые обеспечивают необходимую тягу для подъема квадрокоптера в воздух.
- Обороты каждого двигателя управляются отдельными контроллерами
- Пропеллеры (несущие винты)
- Источники питания – батареи или аккумуляторы
- Датчики ускорении/ угла наклона
- Микроконтроллер – мозг аппарата
- Приборы дистанционного управления
- Дополнительное оборудование
Рама (так же известна как крестовина)
Рама предназначена для соединения все компонентов конструкции в одно целое. Рама должна быть достаточно жесткой и в то же время обладать способностью гасить вибрации роторов.
Рама квадрокоптера, как правило, состоит из двух либо трех частей. Они не обязательно должны состоять из одного и того же материала.
- Центральная плита, на которую монтируются электронные компоненты
- Крестовина из 4 симметричных балок, которые крепятся к центральной плите
- Четыре мотогондолы, которые крепят двигатели к законцовкам балок крестовины.
Для рамы подходят следующие материалы:
- Карбон
- Алюминий и его сплавы
- Дерево, например, фанера или МДФ
Наиболее предпочтительным для использования является карбон, из – за его жесткости и вибропоглощающих свойств, однако, и цена зачастую делает его недоступным для рядовых энтузиастов авиастроения:).
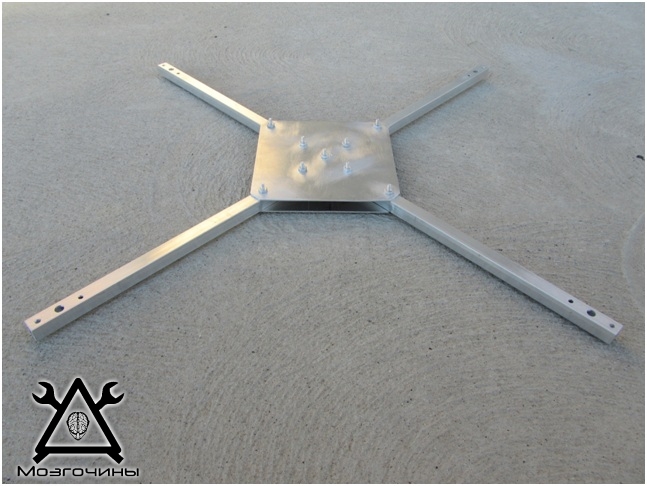
Популярностью при создании разного рода квадрокоптеров пользуются пустотелые алюминиевые профили (в основном – П-образные). Это вызвано их относительно низким весом, жесткостью и приемлемой ценой. В то же время, по сравнению с карбоном (углепластиком), алюминий меньше поглощает вибрации, что может привести к искажению показаний датчиков. Фото именно такой крестовины приведено в заголовке статьи.
Плиты на основе древесины, например, МДФ – плиты или фанера также с успехом используются для создания квадрокоптеров из-за приемлемых вибропоглощающих характеристик. Однако, такие материалы не обладают высокой прочностью и могут быть легко повреждены в случае катастрофы. Несмотря на то, что материал центральной плиты не играет такой же важной роли, как материал для балок крестовины, чаще всего для ее изготовления применяется фанера как легкий и легко обрабатываемый материал, который хорошо поглощает вибрацию.
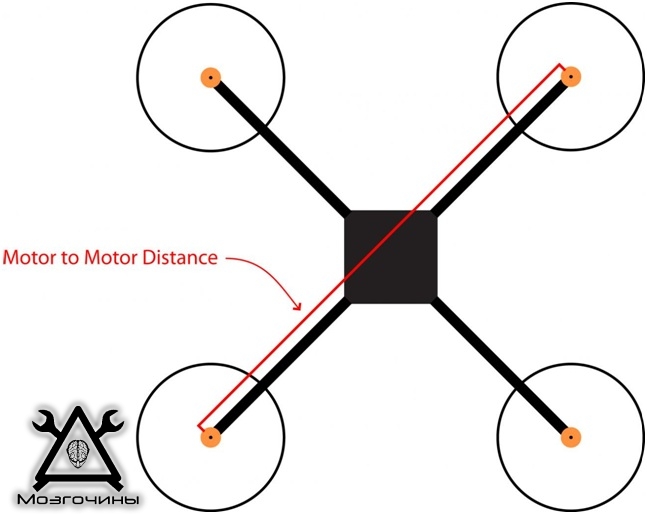
Междвигательное расстояние
Бесколлекторные двигатели

Бесколлекторный двигатель изнутри
Небольшое введение в теорию электродвигателей. Бесколлекторные двигатели, как и электродвигатели постоянного тока классической схемы, используют катушки с проводом и магниты для вращения приводного вала. Катушки в бесколлектроных двигателях расположены на внутренней стороне кожуха двигателя, и соответственно, в их конструкции отсутствуют щетки, предназначенные для передачи электрического тока на расположенные на валу катушки.

И снаружи
Магниты в бесколлекторных двигателях расположены в цилиндре, насаженном на вал двигателя. Таким образом, провода питания присоединяются непосредственно к обмоткам катушек что исключает необходимость использования щеток.
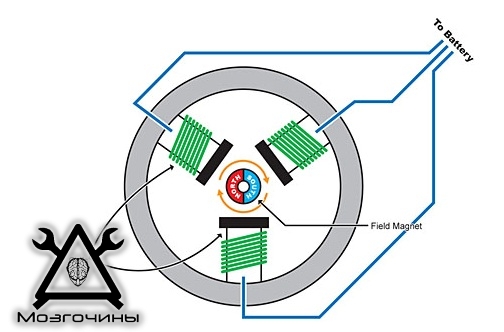
Устройство и принцип действия. Обратите внимание на расположение магнитов.
Преимуществом бесколлекторных двигателей является гораздо более высокая скорость вращения, а также меньшее энергопотребление в режимах работы, сравнимых с двигателями классической схемы. Кроме того, в бесколлекторных двигателях отсутствуют потери мощности из-за трения и искрения щеток и токосъемников, что делает их более энергоэффективными.
ВАЖНО! Не забудьте, что для квадрокоптреа необходимы две пары двигателей с противоположными направлениями вращения.
В дальнейшем, автор обещает подготовить подробное руководство по выбору двигателей и пропеллеров для вашего квадрокоптера.
Пропеллеры (несущие винты)
Наверняка, на изображениях квадрокоптеров вы не заметили, что все их четыре винта не идентичны. Если приглядеться, можно заметить, что передний и задний несущие винты имею правый изгиб, в то время как на перепендикулярном плече крестовины несущие винты изогнуты наоборот.
Как автор указывал ранее, для предотвращения раскрутки аппарата, 2 ротора вращаются в одном направлении, в то время как два других – в противоположном. Пары воздушных винтов, которые вращаются в противоположных направлениях и имеют противоположное направление изгиба, обеспечивают подъемную силу в одном направлении без рысканья по курсу. Это и придает квадрокоптеру его знаменитую курсовую устойчивость.
Промышленно изготовленные воздушные винты для квадрокоптеров изготавливаются в разных диаметрах и с разными степенями изгиба (англ. – pitch, далее – шаг винта). Выбор пропеллера зависит от размаха балок несущей крестовины и определяет выбор двигателей. Ниже приведены несколько типоразмеров несущих винтов в зависимости от размеров квадрокоптеров.
- EPP1045 10 diameter and 4.5 pitch — самый популярный, используется в проектах среднего размера.
- APC 1047 10 diameter and 4.7 pitch — весьма похож на вариант № 1
- EPP0845 8 diameter and 4.5 pitch как правило, применяется в малых квадрокоптерах
- EPP1245 12 diameter and 4.5 pitch – для больших аппаратов, которым необходима значительная тяга
- EPP0938 9 diameter and 3.8 pitch для маленьких квадрокоптеров
Аэродинамика никогда не была легкой наукой. Да же не думайте, что теорию воздушного винта можно уложить в несколько слов или даже часов. Однако, в общем, тему несущего винта в вертолете можно свести к двум следующим соотношениям:
- Больший диаметр и шаг воздушного винта определяет его большую тягу и возможность поднять больший груз. В то же время, для вращения такого винта необходима большая мощность двигателя.
- При использовании высокоборотистых моторов вы можете позволить себе задействовать винты меньшего диаметра. Однако, в случае снижения скорости оборотов, тяги несущих винтов может не хватить для удержания аппарата и груза в воздухе и даже для их относительно мягкой посадки.
Соотношение шага, диаметра и скорости вращения воздушного винта
Диаметр винта определяет его площадь, в то время как шаг винта – его эффективную площадь, которая и создает тягу. Таким образом, при равных диаметрах, воздушный винт с большим шагом создаст большую тягу и обеспечит большую грузоподъемность при бОльших затратах мощности.
Увеличение скорости вращения воздушного винта увеличит скорость и маневренность летательного аппарата, однако наложит ограничение на полезную нагрузку вне зависимости от затраченной на подъем мощности. В то же время, сила тяги (и соответственно, затраченная на вращение винта мощность), увеличивается при увеличении эффективной площади воздушного винта. Это означает, что больший диаметр или шаг воздушного винта позволит создать большую тягу при той же скорости вращения и поднять большую полезную нагрузку.
При выборе комбинации компонентов винтомоторной группы вашего квадрокоптера, в первую очередь, необходимо определить его будущее назначение. Например, если вам нужна высокая стабильность для полетов со значительной нагрузкой типа видеокамеры, ваш выбор – двигатель с меньшей скоростью вращения, однако значительным крутящим моментом и несущие винты большего диаметра или со значительным шагом.

Настало время выяснить,что же такое квадрокоптер и из чего он состоит.
1. Рама
2. Приёмник/Передатчик
3. Контроллер полёта:
a) AIOP
b) NAZA
c) MuliWii
d) HKPilot
е) AMP
f) И другие
4. Силовая установка
a) Мотор
b) Регулятор скорости
c) Пропеллеры
5. Аккумулятор
6. Доп. Оборудование:
a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера
• Передатчик
• OSD
b) Подвес для бортовой камеры
c) Подсветка
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр.
Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев.
Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры.
Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто.
380kv для размеренных медленных и долгих полётов с большой грузоподъемностью
1400kv для быстрого и маневренного хода.
В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А.
Теперь смотрим результаты тестов.
Например видим: 11х4.7 –3S-12А – 830гр
Это означает
11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг )
3S — число банок LiPo батареи
12А — сила тока в цепи при данной нагрузке
830гр – тяга двигателя при даных условиях
Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А
Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых.
Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта.
Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений.
Цена приблизительно в пределах 400-500 долларов.

Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой.
Я запланировал цикл статей и буду не спеша их реализовывать.
Буду рад критике,спасибо за просмотр.
Вскрою карты: конечный результат
Как такую штуку собрать и поднять в небо?
Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.

Можно ли сделать квадрокоптер из мотора HDD диска? Мы проведем тестирование - можно ли сделать квадрокоптер из .

Первый тест мотора. В дальнейшем хочу сделать ротор из алюминия и установить неодимовые магниты. Цель 100 000 .




Сделать самодельный квадрокоптер своими руками не сложно. Это гораздо проще, чем, к примеру, сделать самодельную авиамодель или радиоуправляемый вертолет.
Основа самодельного квадрокоптера — это рама. Ее можно купить готовую или сделать своими руками.
Самый простой вариант — купить готовую раму.
Рама Hobbyking X525 V3
Габариты: 600 мм
Материалы
: Ноги и центр. часть: текстолит Лучи: алюминий Цена: 550 рублей
Преимущество готовой рамы над самодельными в том, что все уже подготовлено для установки электроники и не надо искать материалы для изготовления. Впрочем, раму для самодельного квадрокоптера можно сделать своими руками из практически любых материалов.
Вот, к примеру, квадрик изготовленный из линеек и пеноплекса (пенопластовый утеплитель).

А этот самодельный квадрокоптер сделан из пластиковых труб для водопровода. Причем, такие самодельные квадрокоптеры летают ничуть не хуже заводских!

Если вы хотите сделать красивый и оригинальный квадрокоптер — то смотрите эту статью. В ней вы найдете чертежи квадрокптера как на фотографии выше и подборку электроники для него. Но рама в четырех моторных агрегатах — не главное! Главное в них это мозги — плата управления с гироскопами, магнитометром и бародатчиком. Давайте посмотрим, какую плату можно поставить на квадрокоптер сделанный своими руками.
HobbyKing KK
Это самая дешевая и простая плата управления квадрокоптером. На ней установлены только 3 гироскопа. На самодельный квадрокоптер такую ставить можно только в случае если не планируются полеты с помощью камеры (FPV полеты) и только в случае максимального удешевления квадрика. Такие (или подобные ей) платы ставят на квадрокоптеры-игрушки или дешевые квадрокоптеры на Ebay. Для настройки квадрокоптера придется докупить ISP программатор.









Постройка DIY квадрокоптера. Часть 1 теория
Решили собрать квадрокоптер? Для вас это темная чаща? Не знаете за что взяться? Статья именно для вас. Составлена на личном опыте. Часть 2 Заинтересовали квадрокоптеры. Решил сделать заказ, выбор пал на хабсан х4 c камерой 0.3мр. Дождался, получил.Достаточно много отлетал на нём(были краши, долгие ожидания запчастей и ремонты). Мой мозг посетила идея собрать большой квадрокоптер, окунулся в эту тему, перечитал много статей. По возможности отвечал на вопросы людей, состоящих в группе Rc моделистов: по поводу выбора деталей, сборки квадрокоптера. Из всего этого возникла идея написать сию статью. Принцип полёта

Итак, Если вы решили собрать свой квадрокоптер, то вам необходимо определиться с бюджетом. От суммы, которую вы готовы потратить на это Чудо, зависит размер. Наиболее частые размеры(в мм.) это 250,330,450,550 и больше.
*250 размер
: маленький, легкий, чаще все используют только для FPV полётов.
*330 и 450
золотая середина для бюджетного квадрокоптера. Приемлемая масса и цена сборки.
*550
и больше можно отнести к профессиональным коптерам или мультироторам. Такие машины получатся тяжелыми и дорогостоящими. Для данных ЛА будут мощные двигатели и они могут таскать приличный вес, вплоть до килограммовых зеркалок. Своё повествование я продолжу опираясь на коптер 450 масштаба. Особое место в данной категории занимают рамы DJI 330 и 450, TBS Discovery.

Цена их соответствующая…высокая. Есть множество клонов, его я и выбрал.
4. Силовая установка
a) Мотор b) Регулятор скорости c) Пропеллеры
5. Аккумулятор6. Доп. Оборудование:a) FPV система (вид от первого лица в реальном времени)
• Курсовая камера • Передатчик • OSD
b) Подвес для бортовой камеры c) Подсветка
Теперь можно все детально рассмотреть. 1) С рамой
уже определились. 450 масштаб, клон TBS.

2) Приёмник/Передатчик.
Выбор его имеет очень важное значение. Вам нужно для себя понять: как далеко вы хотите летать. Самые популярные варианты: 1,5-2км обеспечит 2,4Ггц 433 мгц обеспечит около 5-10км(все зависит от мощности, можно улететь и на 20км) Для себя выбрал 2,4Ггц FlySky Th9x 9каналов
Рассмотрим рамы 330,450мм. В зависимости от ваших потребностей необходимо прикинуть вес квадрокоптера. В среднем получается от 1к до 1,5кг. Желательно чтобы тяга моторов была в 2-2,5 раза больше общей массы. Это говорит о том, что тяга должна быть 2-3 кг. Делим это на 4 и получаем тягу одного мотора: примерно 500-750 гр. Возникает вопрос: какой двигатель выбрать? Смотрим в характеристики рамы: нас интересует какие двигатели можно в неё поставить. Должны интересовать первые 2 цифры: 22 или 28 в большинстве случаев. Начинаем выбор двигателя. У названия двигателя вы увидите некую величину, например: 1100kv. Это величина обозначает количество оборотов на 1 вольт. Двигатели с высокими значениями kv имеют меньше витков обмотки статора, чем менее оборотистые.Из этого вытекает, что максимальная сила тока будет выше в двигателях с меньшим kv, которые имеют большую силу крутящего момента и это позволяет использовать большие пропеллеры. Можно сравнить с коробкой передач автомобиля. 380kv и 1400kv это как первая и третья передача у авто. 380kv для размеренных медленных и долгих полётов с большой грузоподъемностью 1400kv для быстрого и маневренного хода. В просторах интернета или же в описании этого двигателя можно увидеть его технические характеристики и результаты тестов. Нужно узнать максимальную силу тока (А) которую сможет потянуть двигатель и исходя их этих данных подобрать регулятор оборотов(ESC). Допустим max А для двигателя 20А. Тогда, ESC берём на 20-25% мощнее, 25-30А. Теперь смотрим результаты тестов. Например
видим: 11х4.7 –3S-12А – 830гр Это означает 11х4.7 — характеристики пропеллера(11-дюймы, 4.7 шаг ) 3S — число банок LiPo батареи 12А — сила тока в цепи при данной нагрузке 830гр – тяга двигателя при даных условиях Таким образом, максимальная тяга 830х4=3300 гр., max сила тока в цепи 12х4=48А Максимальная сила тока нужна для подбора Аккума и Проводки.
Для начала не берите карбоновые пропы. Переплата. Учитесь летать на дешевых. Крепление пропеллера зависит от самого двигателя. Большинство пропеллеров имеют адаптер под ось двигателя. Возможно крепление на Цангах или же резьбой. Есть прекрасные варианты самозатягивающиеся-крепления у DJI, при таком варианте ваш пропеллер никогда не открутится во время полёта. Для более простых вариантов советую дополнительно закрепить герметиком для резьбы.
Обращаю внимание

Как вы поняли, что бы собрать такой БПЛА необходимо не мало вложений. Цена приблизительно в пределах 400-500 долларов.
Этот обзор предназначен для новичков и несет в себе теорию, в скором времени будет продолжение.Со сборкой и настройкой. Я запланировал цикл статей и буду не спеша их реализовывать. Буду рад критике,спасибо
за просмотр. Вскрою карты: конечный результат

Как такую штуку собрать и поднять в небо? Инструкция будет в следующей части)
Вот небольшой ролик из первых полётов с подвесом.
P.S Покупалось все на личные средства.
MultiWii 328P
ITG3205 Трехосевой гироскоп BMA180 Акселерометр BMP085 Барометр HMC5883L Магнетометр Цена
MultiWii 328P — это наиболее оптимальная по отношению цена/качество плата управления. Программатор вшит в плату, акселерометр позволяет компенсировать дрейфы гироскопов, бародатчик — автономно висеть на заданной высоте, а магитометр (фактически компас) включать режим управления, когда коптер может лететь по прямой вращаясь вокруг своей оси. Такое сочетание датчиков позволяет не только полностью автономно контролировать квадрокоптер, но и управлять гироподвесом камеры держа ее параллельно горизонту при любых эволюциях самодельного квадрокоптера.
Как сделать мини-дрон своими руками в домашних условиях
Небольшой квадрокоптер можно смастерить своими руками из нескольких покупных деталей, клея и палочек от мороженого-эскимо. На его сборку понадобится потратить около 15 минут времени и минимум усилий.
Сборка силовой рамы дрона
Проще всего использовать для сборки самодельной рамы для квадрокоптера палочки от мороженого. Их склеивают между собой горячим или холодным клеем в виде решетки.

При сборке рамы дрона из палочек нужно следить, чтобы конструкция была пропорциональной
Установка электронной части и моторов
При помощи того же клея в центральной части рамы закрепляют аккумулятор, а по углам ставят четыре двигателя с мини-винтами. Под батареей питания закрепляют электронную плату, отвечающую за прием сигнала с пульта, и соединяют ее со всеми моторами. Чип контроля подключают также к аккумулятору.

После закрепления ножек мини-дрона нужно убедиться, что конструкция стоит на поверхности ровно
Проверка работоспособности
Собранный своими руками бюджетный квадрокоптер устанавливают на ножки, аккуратно прижимают отверткой к поверхности и нажимают на кнопку старта на пульте. Если пропеллеры благополучно закрутятся, дрон сделан успешно и сможет взлететь при проведении первого настоящего испытания.
Внимание! Мини-коптер, выполненный своими руками, не будет поддерживать регулировку оборотов и смену направления движения. Предназначена такая простая модель только для взлета и посадки.
Пошаговая сборка
Люди, желающие собрать своими руками квадрокоптер, стремятся сэкономить, что вполне понятно. Но причина эта не единственная: многих вопрос интересует потому, что их хобби по управлению беспилотником переросло в желание участвовать в гонках и по возможности стать в них победителем. А для этого необходима доработка конструкции.
Читайте также: