
Коляска для гироскутера своими руками
Обновлено: 07.07.2024
Прошивка платы надоевшего гироскутера под ручку (педаль) газа открывает новые возможности для самодельщиков электротранспорта. Гироскутер (ховерборд) является отличным недорогим донором для изготовления электротранспорта своими руками. На основе запчастей гироскутера можно собрать электросамокат, трайк, детский четырехколесный автомобиль, багги, самоходную тележку и другие двух (и более) колесные полезные и интересные самоделки.
Некоторые самоделки Вы можете посмотреть в этом видео.
Второе условие – плата контроллера обязательно должна быть с чипом STM32F103RCT6, GD32F103RCT6, CS32F103RCT6 (символы после не имеют значения). Работа прошивки с другими чипами не поддерживается.
Что понадобится для прошивки
Программатор ST-Link
Программатор ST-Link V2 доставка из Китая / доставка из РФ, стоимость из китая около 400 руб. Все необходимые провода для подключения будут в комплекте. Подключается в USB порт ПК и тремя проводами к плате гироскутера.
Утилита для программатора STM32 ST-LINK Utility
Скачиваем с официального сайта актуальную версию. Нужно будет принять пользовательское соглашение и указать действующий адрес электронной почты. На него придет письмо со ссылкой на скачивание утилиты.
При установке всё предельно просто, и проблем возникнуть не должно.
Интерфейс утилиты выглядит следующим образом:
Драйвера для программатора ST-Link V2
Распаковываем архив и от имени администратора запускаем dpinst_amd64 (для х64) или dpinst_x86 (для х32) в зависимости от разрядности операционной системы. Разрядность можно посмотреть – Мой компьютер – свойства, (тип системы)
Исходник прошивки
Исходник прошивки (проект) прямая ссылка скачиваем, извлекаем из архива и сохраняем. Его будем настраивать.
Программа Visual Studio
Программа Visual Studio позволит настроить прошивку нужным нам образом и создать BIN-файл, который мы и будем заливать в микроконтроллер с помощью программатора. Для скачивания Visual Studio нужно будет зарегистрироваться на сайте. В процессе установки необходимо соглашаться на все разрешения для программы.
После запуска необходимо установить дополнение PlatformIO IDE. Копируем название, жмем на значок в левом меню, вставляем в поле поиска, выбираем из списка и жмем Install. После завершения установки и автоматических обновлений (это может занять немало времени и она подгузит еще несколько нужных дополнений сама) программа готова к работе.
В некоторых случаях потребуется дополнительно установить Python. На свой компьютер я его не устанавливал, так как всё работает и без него. У некоторых пользователей без него работать не получается.
Также при неполадках с программой иногда помогает её запуск через “Исправление неполадок совместимости” (жмем на иконку программы правой кнопкой мыши, из меню выбираем эту функцию) экспериментируем с различными вариантами.
Настройка прошивки
В исходном состоянии прошивка не готова к заливке в контроллер и её нужно подготовить. Все скриншоты сделаны после редактирования настроек под ту конфигурацию, которая была необходима мне для электросамоката. В ней оба колеса вращаются в одном направлении, максимальный ток на один мотор 15А. Для своих нужд Вы можете экспериментировать с настройками.
Открываем в программе Visual Studio папку с проектом (исходником прошивки). Жмем иконку Explorer – File – Open Folder и выбираем папку с проектом. Необходимо выбрать именно конечную папку с этим названием, иначе прошивка может не компилироваться (собираться).
Выбор режима управления
Открываем в левом меню пункт platformio.ini. Здесь мы видим список возможных вариантов управления. Для управления ручкой газа служит вариант HOVERCAR. Для его активации нужно раскомментировать строку default_envs = VARIANT_HOVERCAR; Variant for HOVERCAR build, для этого убираем знак ; в начале строки.
Далее в левом меню выбираем Inc – config.h, открывается код, в котором проводим необходимые настройки.
Настройка батареи
Так как исходник проекта периодически обновляется, у Вас номера строк могут отличаться от тех, что я привожу в скриншотах, но по тексту их легко найти. Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Настройки батареи (строки 63-82).
Эта настройка нужна для того чтобы научить контроллер правильно измерять напряжение батареи. При вводе неправильного значения в BAT_CALIB_REAL_VOLTAGE возможно преждевременное отключение контроллера, отключение сразу после запуска.
При использовании 10S литий ионной батареи допускается её разряд до 30 В. Поэтому значения BAT_LVL2, BAT_LVL1 и BAT_DEAD целесообразнее установить 340, 320 и 300 соответственно.
Отключение/включение моторов
138 // Enable/Disable Motor
Типы управления и методы контроля
Для самокатов, машинок и других проектов с водителем лучше подходит FOC_CTRL в сочетании с TRQ_MODE (управление моментом). При этом управление наиболее мягкое, высокая энергоэффективность, свободный накат при сбросе газа.
Также в разделе ховеркар (ищите ниже)
Ограничение тока и оборотов
В зависимости от используемых моторов можно отрегулировать максимальный вливаемый в них ток. Для своих 250 Вт моторов я оставил ток по умолчанию 15А. На практике любая плата выдерживает продолжительный ток 20 А (потребуется улучшить охлаждение), более высокий ток на ваш страх и риск.
define I_MOT_MAX 15 – максимальный ток одного мотора, А
define I_DC_MAX 17 – ставим на 2 Ампера больше как рекомендует автор
define N_MOT_MAX 1000 – ограничение максимальнх оборотов, об/мин
Если Вы хотите понизить максимальные обороты, например для безопасности при эксплуатации транспортного средства детьми, уменьшите define N_MOT_MAX экспериментально подобрав это значение для своих моторов. При этом ослабление поля из следующего пункта настроек обязательно должно быть отключено.
Ослабление поля/опережение фазы
Ослабление поля позволяет раскручивать мотор на бОльшие обороты без увеличения напряжения батареи. При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. Если при резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до замедления до некой промежуточной скорости, установите в FIELD_WEAK_HI и N_MOT_MAX значение 1600.
// Field Weakening / Phase Advance
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
154 define FIELD_WEAK_MAX 6 – Максимальный ток ослабления поля, чем больше тем выше возможная скорость (максимум 10)
156 define FIELD_WEAK_HI 1000 // (1000, 1500] – Верхний порог для ограничения оборотов, ставим 1600 если наблюдается глюк при сбросе газа как описано выше
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог для начала ослабления поля, рекомендуется оставить 750
Направление вращения моторов
Раскомментировать для активации. По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
Формирование файла прошивки
После завершения настройки нужно нажать галочку внизу. Программа проверит код на ошибки и при их отсутствии сохранит редактированный нами файл прошивки в папку с проектом по адресу hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / build / VARIANT_HOVERCAR / firmware.BIN. Его мы и будем заливать в чип платы гироскутера.
Если возникают ошибки, проверяем визуально не поставили-ли чего лишнего или не удалили-ли что то нужное. Галочка запуска компиляции может отсутствовать если идет обновление компонентов Visual Studio.
Также замечены похожие платы, но немного с другой разводкой. Они встречаются очень редко, но всё же они есть. После прошивки зуммер не издает звуков – возможно у Вас такая плата. В послендем обновлении исходника появилась и эта версия. В config.h строки 61…66 выбираем вариант 0 – (подходит большинство плат), вариант 1 – второй, более редкий тип плат.
Примеры готовых прошивок
Если у Вас не получается скомпилировать прошивку со своими настройками, я оставлю примеры готовых файлов прошивки.
- направление вращения моторов для самоката. Инвертирован правый мотор (оба мотора вращаются по часовой стрелке, если смотреть со стороны оси)
- максимальный ток на мотор 15 А (17 А макс) не используйте гироскутерную батарею для такого тока!
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
- направление вращения моторов для трайка
- максимальный ток на мотор (детский вариант) 7 А (9 А макс), такой ток не должен повредить большинство исправных гироскутерных батарей 10S 2P
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
Подключение программатора к плате
Программатор ST-Link V2 подключается выводами SWDIO, GND и SWCLK к соответствующим точкам на плате, как показано на рисунке ниже. Чип будет брать питание от родной гироскутерной батареи, поэтому вывод +3,3 V подключать не нужно. Убедитесь что батарея достаточно заряжена и питание не пропадет в момент прошивки.
При прошивке должны быть подключены:
- батарея гироскутера
- кнопка включения гироскутера
- программатор
Процесс прошивки
- Запускаем STM32 ST-LINK Utility
- зажимаем и удерживаем кнопку включения гироскутера в течение всего процесса
- для подключения к чипу жмем Target – Connect (альтернатива – иконка серой вилки на панели управления)
Появившееся предупреждение Can not read memory!… Означает, что чтение родной прошивки недоступно, так как она защищена от чтения.
Придется её стереть. Внимание. После стирания её невозможно будет восстановить.
Снимаем защиту от перезаписи
После завершения этой манипуляции получаем чистый чип
Теперь выбираем файл своей прошивки
Напоминаю, что по умолчанию после настроек в Visual Studio файл прошивки будет находиться по пути hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / buildVARIANT_HOVERCAR / firmware.BIN.
Я создал несколько вариантов прошивок с разными настройками и поэтому выбираю из своей папки.
После удачного завершения процесса в нижнем окне увидим Verifycation…OK и Programmed Memory Checksum: ******
Если у Вас что-то идет не так, проверьте внимательно по скриншотам наличие галочек, и прочих настроек, где они присутствуют на каждом этапе.
При последующих заливках прошивки обязательно предварительно стирайте чип кнопкой Full chip erase, иначе фрагменты старого кода будут мешать работе нового!
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипедные или самокатные газульки с датчиком Холла, педали, либо обычные потенциометры. Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
Всвязи с тем, что обычно ручки управления выносятся далеко от платы, в проводах могут наводиться помехи, что может вызывать нестабильную работу и ложные срабатывания. Для подавления этих помех следует повесить между сигнальными входами и GND конденсаторы ёмкостью 0,03…0,1 мкФ и резисторы сопротивлением 1…10 кОм, лучше сделать это как можно ближе к плате.
Тормоз может не подключаться вообще, если он не нужен и в Вашей конструкции предусмотрены механические тормоза. На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими. Но повесить на него резистор и конденсатор нужно обязательно! И при калибровке (о ней будет ниже) нужно показать вход тормоза сымитировав нажатие кнопки (синий провод на +3,3 В).
При срабатывании на скорости он начинает тормозить рекуперацией, отдавая энергию в батарею. Когда скорость падает до определенного значения, при которой рекуперация становится неэффективна для торможения, контроллер наоборот вкачивает в моторы энергию батареи продолжая активное торможение до полной остановки. На всём продолжении торможения полная блокировка колес исключена и получается некий эффект ABS. Усилие торможения развивается достаточное для того чтобы почти улететь через руль при полном резком нажатии. Поэтому реализовывать его с помощью одной только кнопки – плохая идея. Для плавного дозирования торможения годится аналогичная газульке ручка на датчике Холла. Вариант подешевле – кнопка с потенциометром. Потенциометром в этом случае устанавливается требуемое усилие торможения.
Калибровка ручек газа и тормоза
Сразу после прошивки не будет никакой реакции на нажатия ручек газа и тормоза. Для того чтобы контроллер понимал, как на них реагировать, его необходимо обучить. Во время этой операции он запомнит минимальные и максимальные значения напряжений сигналов управления. Они не обязательно должны быть именно от 0 до 3,3 В и могут принимать любые значения этого диапазона, например от 0,5 В до 3 В.
Перед калибровкой необходимо убедиться, что контроллер выключен, колёса (включая фазные провода и провода от датчиков Холла), ручки газа и тормоза (если она нужна) подключены согласно схеме.
Для входа в режим калибровки нужно выполнить следующие действия:
- нажать и удерживать кнопку питания контроллера не менее 2 сек, в этот момент прозвучит многотональный звуковой сигнал
- кратковременно отпустить (менее секунды) и снова зажать и удерживать кнопку питания, в этот момент прозвучит короткий гудок высокого тона
- дождаться короткого гудка высокого тона
- отпустить кнопку питания
- дождаться длинного гудка низкого тона
- нажать пару раз полностью на ручку газа и отпустить
- нажать пару раз полностью на ручку тормоза и отпустить(если используется кнопка с потенциометром, то нажимать её при выкрученном потенциометре в минимальное сопротивление, чтобы показать максимальное напряжение на сигнальном проводе)
- нажать кнопку выключения
- перезагрузить контроллер и проверить реакцию на нажатия ручек управления
После успешной калибровки колёса должны соответственно реагировать на ручки газа и тормоза. Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля. Это так называемая “отсечка” от превышения максимальных оборотов. При торможении колёса вращаются “туда – обратно” и не успокаиваются. В вывешенном состоянии колес это нормально, под нагрузкой такого не будет.
Если калибровка прошла успешно и контроллер не издает звуковых сигналов ошибки, но при этом колёса не крутятся либо крутятся медленно/с посторонними звуками, возможно необходимо подобрать правильную комбинацию фазных проводов/сигнальных проводов с датчиков Холла.
Это не все возможные настройки, а только основные которым обязательно нужно уделить внимание.
Не стесняйтесь поддержать автора этой статьи, если она оказалась полезной для Вас!
Заказать готовую прошитую плату с нужными настройками
Если Вам нужна уже готовая прошитая плата, но по какой либо причине не хотите заниматься прошивкой самостоятельно, Вы можете заказать её здесь.
Только на днях был свидетелем такой картины, когда женщина на моторизованной коляске не смогла преодолеть въезд на пешеходную часть "бульвара" на Пронской улице (Москва, район Жулебино), причём именно эту часть улицы усиленно "благоустраивали" всё прошедшее лето. Зачем-то переложили плитку, установив на месте "старой", новые плитища, притом так, что даже электрифицированная инвалидная коляска не смогла въехать на неё. А что уже говорить про тех, кто до сих пор крутит колёса руками.
Москва, Жулебино, ул. Пронская - последствия "благоустроительства" - даже моторизованная коляска не может "взять" этот бордюр
Москва, Жулебино, ул. Пронская - последствия "благоустроительства" - даже моторизованная коляска не может "взять" этот бордюр
Ждать милости или разумного подхода к "благоустройству" этим людям от властей и "благоустроительных" подрядчиков этим людям придётся немало времени, а передвигаться по своим нуждам им необходимо постоянно.
Какой выход из этой ситуации? Есть ли он? Вероятно, есть.
Французская компания Nino Robotics , руководитель которой, Пьер Бардин , так же передвигается на инвалидной коляске, в своём проекте технически реализовал два варианта, которые могут в значительной мере упростить жизнь людям с ограниченными возможностями.
Насмотревшись роликов на Youtube и на своих детей, пускающих слюни на арендуемые гироскутеры, решил попробовать свои силы в самостоятельной сборке данного устройства. Рассуждая о целесообразности сделать самому или купить, убедил себя, что это игрушка, причем сезонная, причем для моих детей погодок одним устройством не обойтись. Также в самоубеждении сыграл роль опыт сборки домашнего ЧПУшного станка, ну и собственно популярность самого тренда гироскутеров и вау эффект на окружающих меня обывателей.
Опыт сборки гироскутера собственными силами
Приступая к работе, решил сначала опробовать концепцию и определиться с необходимой мощность электромеханических узлов, чтобы обосновать дальнейшие вложения в комплектующие.
Первая версия (сигвэй)
С механической точки зрения вариант сигвэя казался более простым (отсутствует нагруженный средний поворотный узел), кроме того все, что нашел на youtube это самоделки именно сигвэев.
Не смотря на то, что имею достаточный опыт в программировании и работе с контроллерами решил софт самостоятельно не писать, а найти наиболее готовые решения. Кроме того, я редко могу поддержать свою мотивацию более одного месяца, а отладка работы софта с электромеханическими узлами редко заканчивается абсолютной победой, чаще компромиссом, и мысль о том, что совершенство не достигнуто меня бы червоточила.
В итоге выбор пал на работу Ovaltine’s Segway Clone (исходники есть на GitHub). Данный проект мне показался наиболее зрелым и поддерживающим железо, которое у меня есть (Arduino, MPU-6050, драйвера моторов с 2-мя и 3-мя управляющими сигналами на канал). Проект исчерпывающе прокомментирован, что позволяет не углубляться в анализ нюансов и как результат не догадываться о недочетах.
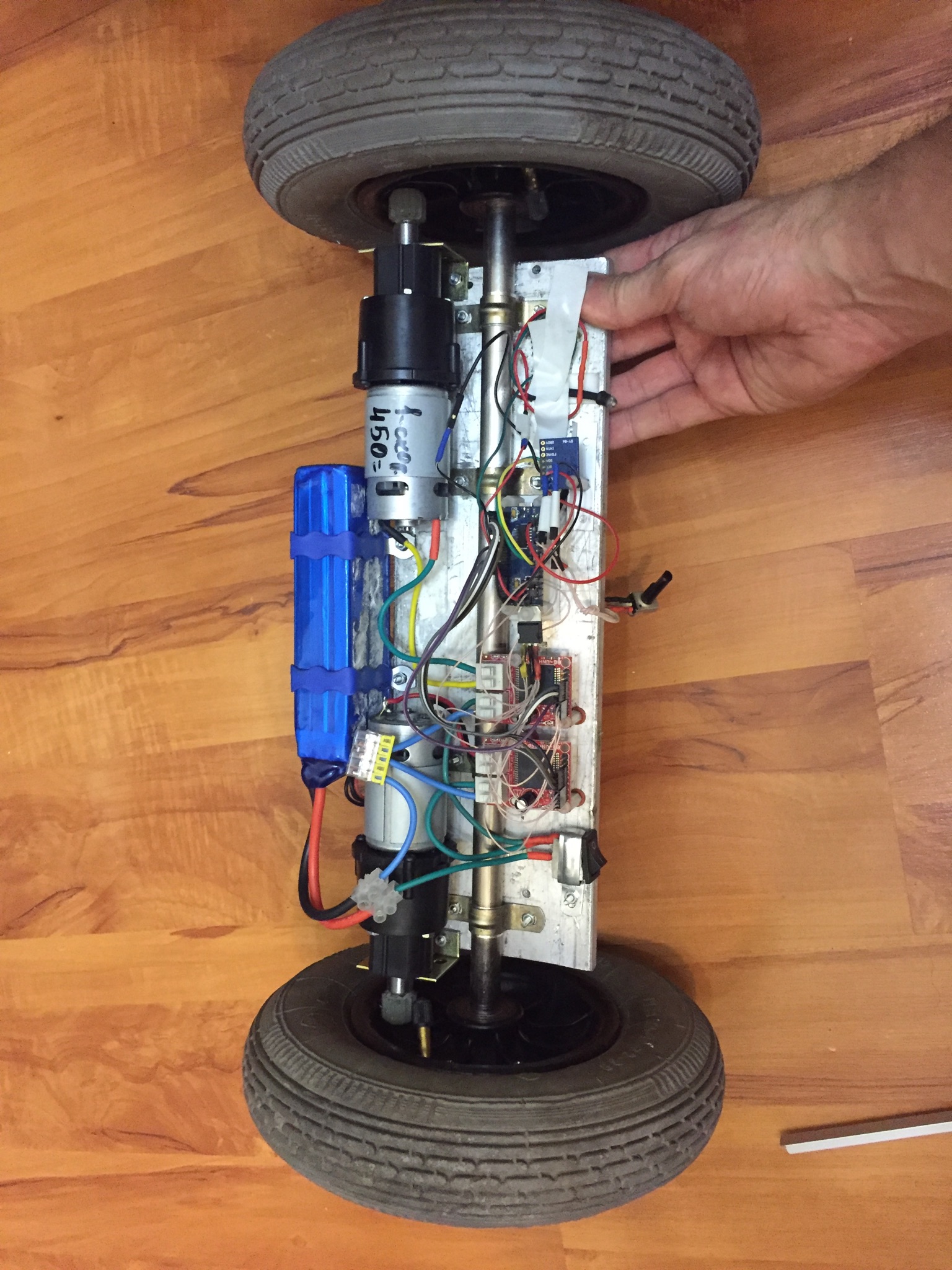
Недолго оттягивая, была сляпана платформа для испытаний:
Алюминиевая пластина толщина 12мм
Ось диаметром 14мм – направляющая от матричного принтера
Скобы строительные диаметр 14мм
Колеса – передние от инвалидной коляски (диаметр 8 дюймов, подшипники встроены).
Моторы и планетарные редукторы от шуруповертов на 18В
Шестерни передачи на колеса от электромясорубок
Аккумулятор 12В 5Ач Li-pol (остался после спада тренда квадракоптеростроения)
Датчик 10DOF MPU-6050 (остались после спада тренда квадракоптеростроения)
Уголки, болты и гайки
По доступности можно отметить, что п.1,3,4,5,6,11 были куплены на местном рынке.
Отдельно следует отметить, что моторы с редукторами мне продали, разобрав на моих изумленных глазах, рабочий шуруповерт (450р мотор, 500р редуктор с ограничителем момента). На мой вопрос это окупается? Мне продавец ответил, что половину закупочной цены данного шуруповерта уже отбил на продаже аккумулятора.
После прошивки и калибровки гироскопа все заработало практически без проблем. Пришлось перекинуть на одном драйвере сигналы управления, потому что колесо крутилось в ненужную сторону, и выяснилось, что шестерни на валах редукторов проскальзывают несмотря на клей.
С шестерней вопрос решил следующим образом: гравером с отрезным диском нанес насечки продольно оси вала глубиной 0,5мм и длинной равной ширине одеваемой шестерни. Надел шестерню и забил в насечки обрезки скрепки (типа микрошпонки). Следом проявилось новое слабое место – недостаточное прижимное усилие шестерни редуктора к шестерне колеса. Зная, что это всего лишь промежуточный прототип не стал решать проблему фундаментально, а просто стянул кабельной стяжкой оси колеса и вала редуктора. После 20 минут покатушек капроновая стяжка не нагрелась хотя вал редуктора в отличие от вала колеса подвижный.
Важно! Драйверы vnh2 до 14В.
Управление поворотами было сделано вынесением потенциометра в руку.
В результате потраченных усилий, денег и времени было проверена работоспособность и достаточность мощности всего устройства и обоснованы дальнейшие вложения указанных ресурсов. Конечно, можно было бы, и рассчитать все заранее, исходя из требуемого момента на колесе, но разброс реальных параметров двигателей от шуруповертов и малый выбор среди тех продавцов, кто разберет для тебя два конкретных шуруповерта, делает это бессмысленным.
Вторая версия (гироскутер)
В связи с необходимостью установки подшипника в средний узел соосно с колесами потребовалось поднять ось колес от платформы, что вкупе с разделением полуосей приводит к возникновению крутящих моментов на полуоси (излом). Пришлось отказаться от слабых скоб, которые начали подымать лапки вверх.
Анализ доступных подшипников с наименьшей высотой привел к выбору игольчатых подшипников (цилиндрических с внутренним диаметром 17мм и внешним 23мм). Здесь стало ясно, что ось среднего узла будет по диаметру больше чем полуоси колес. Мне не посчастливилось найти ось точно под подшипник. Пришлось обратиться к токарю с целью проточить строительный болт до нужного диаметра и сделать проточки для стопорных колец (вместо колец, впоследствии, была использована вязальная проволока для арматуры). Стопорные кольца понадобились, т.к. у данного подшипника отсутствует внутренняя оправа и цилиндры катаются по поверхности оси (т.е. он не напрессовывается).
Далее осталось только придумать узлы крепления, обеспечивающие соосность трех осей (две полуоси колес и толстая ось среднего узла). Это требование необходимо выполнить, чтобы не было неприятного ощущения на стопах, что их поворачивают туда, куда не требуется.
Решение пришло само: зачем искать специфичные крепления, если можно сделать их самому. Была куплена пластина алюминия толщиной 16 мм, порезана торцовочной пилой (диском с отрицательным углом) на одинаковые прямоугольники и которые были просверлены ступенчатым сверлом до нужных диаметров. Требования к точности сверления высокие только для двух оправ с подшипниками. Остальные (6 шт.) могут иметь разумные допуски, тем более, что фиксация неподвижных осей в оправах выполняется расклиниванием оправ.
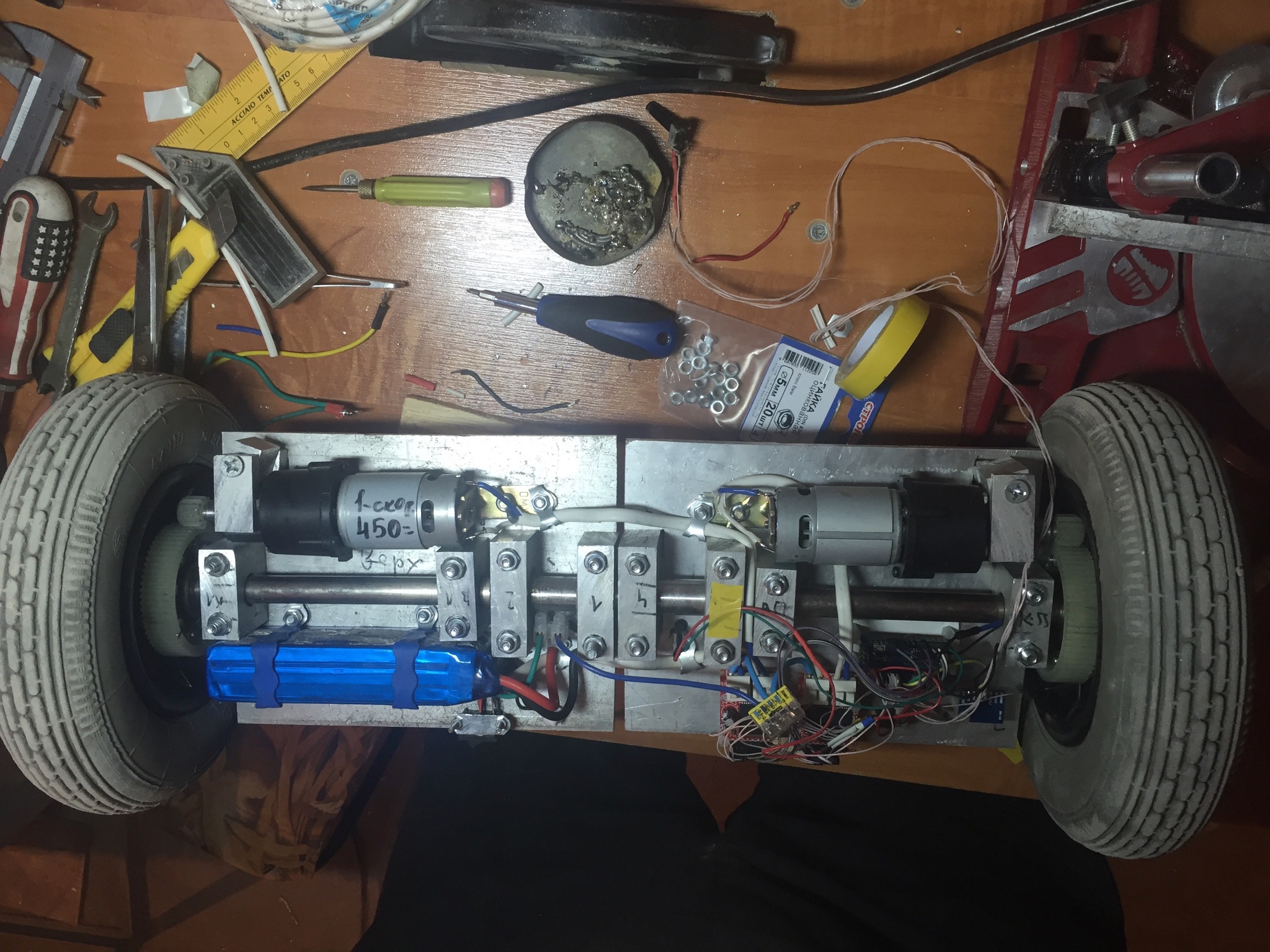
Силовые провода были взяты из гибкого провода для проводки 2х2,5мм. Часть проводки удалось выполнить без пайки на пружинных и винтовых клеммах, но полностью от пайки отказаться не удалось.
только самы зоркие найдут потенциометр с тягой
Очередное испытание показало, что одна полуплатформа оснащенная гироскопом, а вторая связана с первой через потенциометр дают ассиметричную реакцию при повороте вправо и влево. Грубо прикинув в уме, это стало вполне объяснимо. К примеру,
Поворот направо (Левая наклонена \; Правая ровно __)
Угол левой платформы с гироскопом +5 значит скорость на колесах: Л=5 П=5. Угол правой платформы с потенциометром -5 от первой (т.е. нога горизонтально ожидается поворот направо) скорость на колеса Л=5-(-5)=10; П=5+(-5)=0. Итог - поворот вокруг правого колеса.
Поворот налево (Левая __; Правая )
Угол левой платформы с гироскопом 0 (горизонатльно) значит скорость на колесах: Л=0 П=0. Угол правой платформы с потенциометром +5 от первой (ожидается поворот налево) скорость на колеса Л=0+(-5)=-5; П=5-(-5)=5. Итог – поворот на месте вокруг себя.
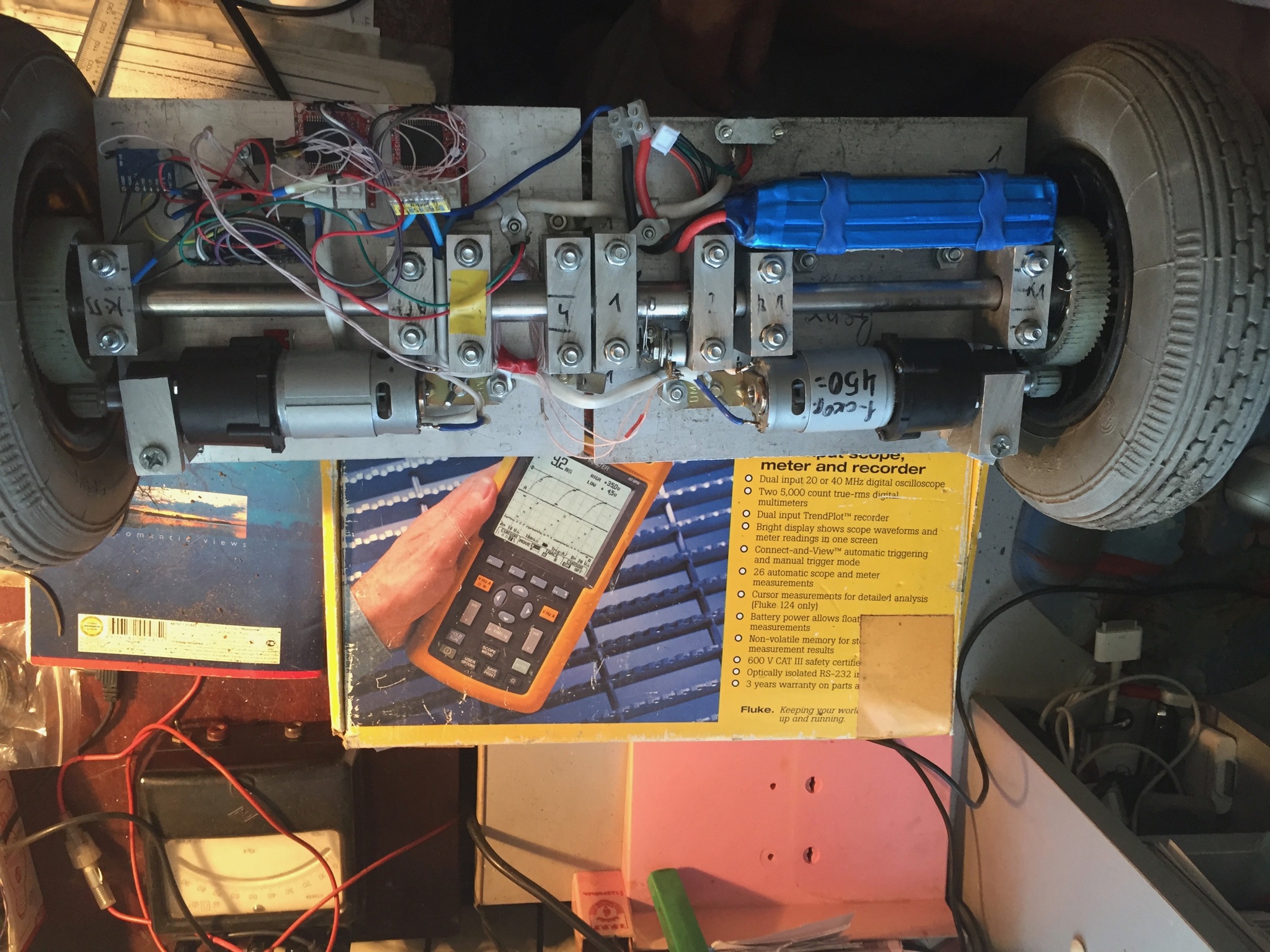
Версия три (два контроллера)
Не долго думая и оставаясь верным концепции не разбираться с ПО, было решено на каждую полуплатформу поставить свой гироскоп и контроллер (благо этого добра у меня осталось достаточно).
Таким образом, каждый Arduino реально управляет только одним колесом по показаниям своего гироскопа. Потенциометры заменились в ПО обнулением переменной после нормирования результатов вызова analogRead (с контакта потенциометра), т.к. руль больше не нужен.
Также потребовалось немного успокоить ПИД регулятор уменьшением Кп.
Данная версия работает наиболее адекватно, но включение активности, которое происходит после выравнивания полуплатформ (захват горизонта после 3 секунд), происходит независимо. Т.е. если первая полуплатформа после включения была выравнена раньше, то и активизируется балансер раньше. Это практически не заметно, но вытекает логически из ПО.

Искренняя радость. фотографа.
По результатам испытания функциональности на детях было решено одеть это все в корпус, что бы скрыть от непосвященных пользователей секреты электромеханической магии.
Лучше всего для корпуса подошел плоский ПВХ (204мм) воздуховод. Белый цвет выглядел не кошерно, в итоге транспортное средство было обклеено пленкой черного цвета под углеволокно. Вес всего устройства, благодаря пластиковым ободам колес, составил около 5 кг. В таком виде и было передано в пользование.
Фотки с корпусом, к сожалению, не осталось.
Собственные наблюдения, не стоит гнаться за скоростью реакции следования гиро за отклонением тела. Для человека это не свойственно, он сам регулирует равновесие. Чем медленнее реакция гиро (разгон 1,5-3 сек до максимальной скорости - оптимально) тем комфортнее наезднику. Для хорошей работы регулятору важнее не столько вес, а сколько рост пассажира (по сути это перевернутый маятник). Для моей конфигурации дети оказались по разные стороны критической границы роста - 135см…125см.
Наверняка вы много раз видели такую штуку в интернете. Кто-то ее даже сам собирает у себя на заднем двое. Я решил .
Это видео вышло скорее как влог. Тут я сделал рулевое управление и научился управлять моторколесами от гироскутера.
Жить со вкусом-это не только вкусно и правильно питаться. Это ещё спорт и путешествия,хорошая музыка,хорошие .
Всем привет! Колеса от героскутера, контролер с али, тачка обычная))) честно моё мнение. Прикольная самоделка.
Моя вторая прошивка где два режима работы, с накатом и с электронным тормозом, можно менять без перепрошивки.
Следующие проекты: Сделать лодочный мотор. Поставить гироскутер на гусеницы. Стационарный сверлильный станок.
Сделал ребенку трайк из гироскутера и трехколесного велосипеда. При желании за пару минут гироскутер можно .
Новинка лета 2019. Прекрасное решения при использовании любого гироскутера типа Smart Balance, диаметр колеса .
Примерно 3 года назад я решил сделать крутую тележку для гироскутера, и вот что у меня получилось. Instagram: .
Эта простая самоделка, очень помогает в быту, и ничего не требует, кроме своевременной зарядки аккумулятора. очень .
Собрал прицеп к электротрайку. Тележка позволяет перевозить крупногабаритные грузы и даже Арбузы так же вы можете .
Тележка для Гироскутера - ХОВЕРКАРТ, Гирокарт. Я купил тележку для Гироскутера - Ховеркарт или она еще называется .
Померил ширину гироскутера и вот таким вот образом согнул. Естественно такие детальки надо 2. Теперь берут два .
В этом видео мы сделаем обзор на комплект Ninebot Gokart Kit, который превращает гироскутер Xiaomi в гоночный .
Видео-обзор работы нашего самодельного картинга(из гироборда) Если интересует как его собрать - смотри следующие .
Дрифт! Разгон! Гонка! Картинг на электротяге из мотор колес от гироскутера! Доступная самоделка которая гораздо лучше .
Самодельный электро картинг который Александр сделал для своих детей своими руками. Была крутая идея и вышел .
В этом видео построил для гиротелеги переломную раму с хитрым механизмом перелома. Это по сути - самодельный .
Тележка для гироскутера. Просто очередное развлечение или реально удобное и крутое дополнение к гироскутеру?
Гибридный полноприводный карт из гироскутера. Как подключить и запустить колесо от гироскутера, покажем в .
Как ездит ховеркарт, он же гирокарт и тележка для гироскутера. За качество видео и музыку не судите. Купить ховеркарт .
Электроскейт из гироскутера с компенсатором обратного угла наклона. Мощность 1400ватт, 4 стандартных аккума.
Тележка для Гироскутера Делает из двухколесного транспортного средства - четырёх Колесное. Тележка оснащена .

04:24

03:31

05:41
05:02

02:29
![Oliver Tree & Little Big - The Internet [Music Video]](https://i.ytimg.com/vi/5Og1N-BVSwg/0.jpg)
03:36

04:43
Читайте также: