
Как сделать шим сигнал
Добавил пользователь Алексей Ф. Обновлено: 19.09.2024
Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана здесь.
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в этой статье. Он построен на базе микросхемы NE555 и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.

В уроке узнаем о широтно-импульсной модуляции, о реализации этого способа управления в контроллерах Ардуино, о режимах и функциях работы с ШИМ в Ардуино.
Прервемся на урок от разработки контроллера холодильника, для того чтобы научиться работать с широтно-импульсным модулятором Ардуино.
В нашей разработке используется именно такой способ регулирования мощности на элементе Пельтье.
Широтно-импульсная модуляция.
Широтно-импульсная модуляция (ШИМ) это способ управления мощностью на нагрузке с помощью изменения скважности импульсов при постоянной амплитуде и частоте импульсов.
Можно выделить две основные области применения широтно-импульсной модуляции:
- Во вторичных источниках питания, различных регуляторах мощности, регуляторах яркости источников света, скорости вращения коллекторных двигателей и т.п. В этих случаях применение ШИМ позволяет значительно увеличить КПД системы и упростить ее реализацию.
- Для получения аналогового сигнала с помощью цифрового выхода микроконтроллера. Своеобразный цифро-аналоговый преобразователь (ЦАП). Очень простой в реализации, требует минимума внешних компонентов. Часто достаточно одной RC цепочки.
Принцип регулирования с помощью ШИМ – изменение ширины импульсов при постоянной амплитуде и частоте сигнала.

На диаграмме можно увидеть основные параметры ШИМ сигнала:
- Ui - амплитуда импульсов ;
- Ton – время активного (включенного) состояния сигнала;
- Toff – время отключенного состояния сигнала;
- Tpwm – время периода ШИМ.
Даже интуитивно понятно, что мощность на нагрузке пропорциональна соотношению времени включенного и отключенного состояния сигнала.
Это соотношение определяет коэффициент заполнения ШИМ:
Он показывает, какую часть периода сигнал находится во включенном состоянии. Может меняться:
- от 0 – сигнал всегда выключен;
- до 1 - сигнал все время находится во включенном состоянии.
Чаще используют процентный коэффициент заполнения. В этом случае он находится в пределах от 0 до 100%.

Среднее значение электрической мощности на нагрузке строго пропорционально коэффициенту заполнения. Когда говорят, что ШИМ равен, например, 20%, то имеют в виду именно коэффициент заполнения.
Формирование аналогового сигнала.
Если сигнал ШИМ пропустить через фильтр низких частот (ФНЧ), то на выходе фильтра мы получим аналоговый сигнал, напряжение которого пропорционально коэффициенту заполнения ШИМ.
В качестве ФНЧ можно использовать простейшую RC цепочку.

Из-за неидеальной характеристики такого фильтра частота среза должна быть минимум на порядок меньше частоты ШИМ. Для простого RC фильтра частота среза вычисляется по формуле:
- При повышении частоты среза ФНЧ на выходе фильтра увеличиваются пульсации с частотой ШИМ.
- При уменьшении частоты среза фильтра снижается время реакции выходного аналогового сигнала на изменения ширины импульсов.
Из этого вытекает главный недостаток широтно-импульсной модуляции. Метод способен синтезировать только достаточно медленные аналоговые сигналы или требует применения фильтров низких частот с высокой добротностью, сложных в реализации.
Я бы рекомендовал:
- В случае, когда к быстродействию аналогового сигнала жестких требований нет выбирать заведомо заниженную частоту среза фильтра.
- Если необходимо оптимизировать быстродействие аналогового преобразователя, то лучше промоделировать схему.
Даже простейшие моделирующие программы вычисляют уровень пульсаций достаточно точно. Вот результаты моделирования на SwCAD для ШИМ частотой 500 Гц и RC фильтрами с частотами среза 500 Гц, 50 Гц и 5 Гц. Зеленым цветом показана диаграмма ШИМ, синим – напряжение на выходе RC фильтра.
Частота среза 500 Гц (10 кОм, 32 нФ).

Частота среза 50 Гц (10 кОм, 320 нФ).

Частота среза 5 Гц (10 кОм, 3,2 мкФ).

Точность преобразования широтно-импульсных модуляторов определяется погрешностью амплитуды импульсов (т.е. стабильностью питания микроконтроллера) и значением падения напряжения на ключах цифровых выходов микроконтроллера. Как правило, точность ШИМ микроконтроллеров невысока. Добиться высокой точности ШИМ преобразования можно с помощью дополнительной схемы с аналоговыми ключами и источником опорного напряжения.
К недостаткам использования широтно-импульсных модуляторов в качестве ЦАП также следует отнести высокое выходное сопротивление. Оно определяется сопротивлением резистора RC фильтра и не может быть низким из-за малой нагрузочной способности выходов микроконтроллера.
Широтно-импульсные модуляторы в Ардуино.
Платы Ардуино на базе микроконтроллеров ATmega168/328 имеют 6 аппаратных широтно-импульсных модуляторов. Сигналы ШИМ могут быть сгенерированы на выводах 3, 5, 6, 9, 10, 11.
Управление аппаратными ШИМ осуществляется с помощью системной функции analogWrite().
void analogWrite(pin, val)
Функция переводит вывод в режим ШИМ и задает для него коэффициент заполнения. Перед использованием analogWrite() функцию pinMode() для установки вывода в режим “выход” вызывать необязательно.
- pin – номер вывода для генерации ШИМ сигнала.
- val – коэффициент заполнения ШИМ. Без дополнительных установок диапазон val от 0 до 255 и соответствует коэффициенту заполнения от 0 до 100 %. Т.е. разрядность системных ШИМ в Ардуино 8 разрядов.
analogWrite(9, 25); // на выводе 9 ШИМ = 10%
Частота ШИМ Ардуино 488,28 Гц.
Для генерации ШИМ используются все три таймера Ардуино.
| Таймер | Используется для генерации ШИМ на выводах |
| Таймер 0 | выводы 5 и 6 |
| Таймер 1 | выводы 9 и 10 |
| Таймер 2 | выводы 3 и 11 |
Если таймер используется для других целей, например для прерывания, то параметры ШИМ соответствующих выводов могут не соответствовать указанным выше.
Поэтому, при использовании библиотек MsTimer2, TimerOne или им подобных некоторые выводы в качестве ШИМ сигналов использовать нельзя.
Увеличение частоты и разрядности ШИМ Ардуино.
Система Ардуино устанавливает на всех выводах ШИМ параметры:
- частота 488,28 Гц;
- разрешение 8 разрядов (0…255).
Очень низкая частота. Для большинства приложений совершенно не допустимая.
В разработке контроллера элемента Пельтье, начатой в предыдущем уроке, частота ШИМ должна быть не менее 30-50 кГц. В интернете достаточно много предложений по увеличению частоты ШИМВо всех описываются методы увеличения частоты до 31 кГц. В принципе приемлемый вариант, но мне захотелось большего.
Я разобрался с Таймером 1 микроконтроллера ATmega168/328, перевел ШИМ в быстродействующий режим и добился частоты ШИМ Ардуино до 62,5 кГц. Заодно я научился менять разрядность ШИМ. Чтобы в следующий раз не копаться в документации на микроконтроллеры ATmega168/328 я свел всевозможные варианты ШИМ для таймера 1 в таблицу.
Строчки из правого столбца для выбранного варианта необходимо написать в функции setup().
Варианты параметров ШИМ на выводах 9 и 10 Ардуино (таймер 1).
| Разрешение | Частота ШИМ | Команды установки режима |
| 8 бит | 62 500 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x09; |
| 7 812,5 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0a; | |
| 976,56 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0b; | |
| 244,14 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0c; | |
| 61,04 Гц | TCCR1A = TCCR1A & 0xe0 | 1; TCCR1B = TCCR1B & 0xe0 | 0x0d; | |
| 9 бит | 31 250 Гц | TCCR1A = TCCR1A & 0xe0 | 2; TCCR1B = TCCR1B & 0xe0 | 0x09; |
| 3 906,25 Гц | TCCR1A = TCCR1A & 0xe0 | 2; TCCR1B = TCCR1B & 0xe0 | 0x0a; | |
| 488,28 Гц | TCCR1A = TCCR1A & 0xe0 | 2; TCCR1B = TCCR1B & 0xe0 | 0x0b; | |
| 122,07 Гц | TCCR1A = TCCR1A & 0xe0 | 2; TCCR1B = TCCR1B & 0xe0 | 0x0c; | |
| 30,52 Гц | TCCR1A = TCCR1A & 0xe0 | 2; TCCR1B = TCCR1B & 0xe0 | 0x0d; | |
| 10 бит | 1 5625 Гц | TCCR1A = TCCR1A & 0xe0 | 3; TCCR1B = TCCR1B & 0xe0 | 0x09; |
| 1 953,13 Гц | TCCR1A = TCCR1A & 0xe0 | 3; TCCR1B = TCCR1B & 0xe0 | 0x0a; | |
| 244,14 Гц | TCCR1A = TCCR1A & 0xe0 | 3; TCCR1B = TCCR1B & 0xe0 | 0x0b; | |
| 61,04 Гц | TCCR1A = TCCR1A & 0xe0 | 3; TCCR1B = TCCR1B & 0xe0 | 0x0c; | |
| 15,26 Гц | TCCR1A = TCCR1A & 0xe0 | 3; TCCR1B = TCCR1B & 0xe0 | 0x0d; |
Следующий скетч генерирует на выводе 9 ШИМ с частотой 62,5 кГц и коэффициентом заполнения примерно 10 %.
void setup()
// ШИМ 8 разрядов, 62,5 кГц
TCCR1A = TCCR1A & 0xe0 | 1;
TCCR1B = TCCR1B & 0xe0 | 0x09;
analogWrite(9, 25); // на выводе 9 ШИМ=10%
>
Это максимально возможная частота ШИМ Ардуино для большинства плат (с частотой генератора 16 мГц).
На форуме достаточно часто встречаются вопросы по реализации Широтно Импульсной Модуляции на микроконтроллерных устройствах. Я и сам очень много спрашивал по этому поводу и, разобравшись, решил облегчить труд новичкам в этой области, так как информации в сети много и рассчитана она на разработчиков разного уровня, а сам я только- только в нем разобрался и память ещё свежа.
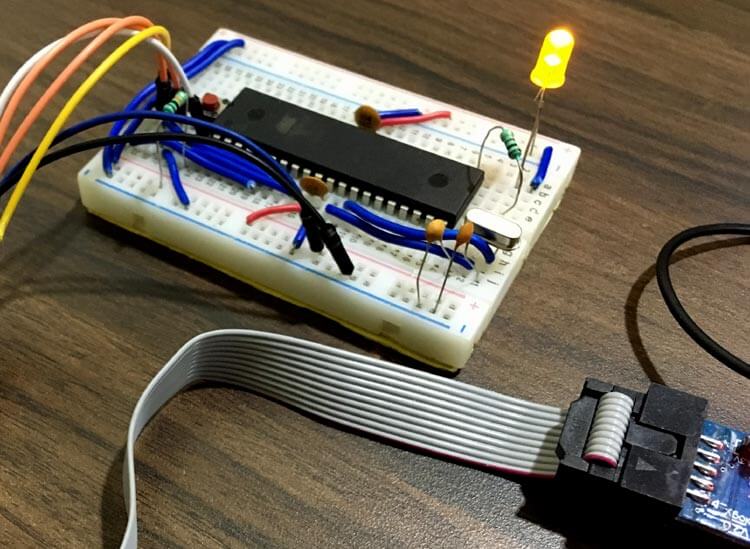
Так как для меня самым важным было применение ШИМ именно для управления яркостью светодиодов, то именно их я и буду использовать в примерах. В качестве микроконтроллера будем использовать горячо любимый ATmega8.
Для начала вспомним, что такое ШИМ. ШИМ сигнал - это импульсный сигнал определенной частоты и скважности:

Частота, это количество периодов за одну секунду. Скважность- отношение длительности импульса к длительности периода. Можно изменять и то и другое, но для управления светодиодами достаточно управлять скважностью. На картинке выше мы видим ШИМ сигнал со скважностью 50 %, так как длительность импульса (ширина импульса) ровно половина от периода. Соответственно светодиод будет ровно половину времени во включенном состоянии и половину в выключенном. Частота ШИМ очень большая и глаз не заметит мерцания светодиода из за инерционности нашего зрения, поэтому нам будет казаться, что светодиод светится на половину яркости. Если мы изменим скважность на 75%, то яркость светодиода будет на 3 четверти от полной, а график будет выглядеть так:

Получается, что мы можем регулировать яркость светодиода от 0 до 100 %. А теперь поговорим о таком параметре ШИМ, как разрешение. Разрешение- это количество градаций (шагов) регулировки скважности, мы будем рассматривать разрешение в 256 шагов.
С параметрами вроде разобрались, теперь поговорим о том, как нам получить этот самый ШИМ от микроконтроллера. Берем остро заточенный разогретый паяльник и начинаем пытать МК, одновременно подцепившись к двум его ногам осциллографом и проверяя наличие на них сигнала нужной нам скважности. В микроконтроллерах есть аппаратная поддержка ШИМ и несколько каналов для него, в нашем случае 3. За выдачу ШИМ отвечают определенные выводы МК, в нашем случае OC2, OC1A, OC1B (15,16,17 нога в DIP корпусе). Так же для этого используются таймеры микроконтроллера, в нашем случае TC1, TC2. Так как же сконфигурировать МК для выдачи сигнала необходимой скважности? Все очень просто, для начала сконфигурируем нужные нам ноги на выход:
Далее начнем конфигурировать таймеры. Для таймера TC1 нам потребуются два регистра: TCCR1A и TCCR1B. Открываем даташит и читаем как настраиваются эти регистры. Я настроил его на 8 битный сигнал ШИМ, что соответствует разрешению в 256 шагов:
Для таймера TC2 мы будем использовать регистр TCCR2=0x69;. Его настройка выглядит так:
Всё, таймеры сконфигурированы. Скважность будем задавать регистрами OCR1A,OCR1B, OCR2:
Зададим требуемые скважности:
Ну и поместим инкремент и декремент этих регистров в бесконечный цикл:
Первая тестовая программа готова и выглядит для CVAVR она так:
Компилируем и пробуем в протеусе:
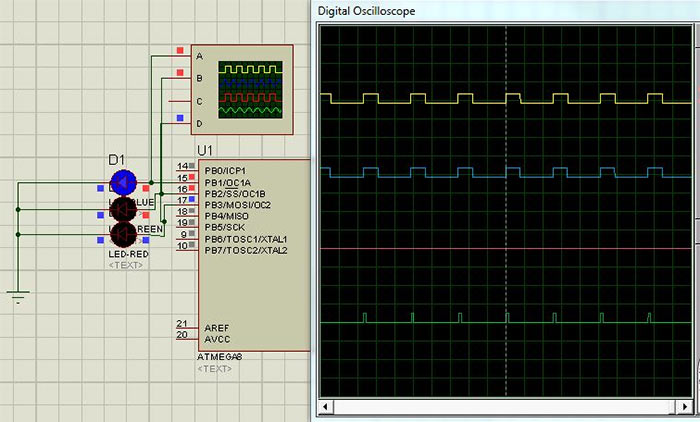
Как видим, программа полностью работоспособна и выполняет возложенные на нее задачи, ничего сложного в ней нет.
В следующей статье рассмотрим программный ШИМ, который необходим в случае если число аппаратных нам недостаточно или в силу других причин.
serenbkii Опубликована: 04.08.2013 Изменена: 08.08.2013 0 1

Вознаградить Я собрал 0 1
Широтно-импульсная модуляция, сокращенно ШИМ, может быть реализована на Arduino несколькими способами. В этой статье объясняются простые методы ШИМ, а также методы использования этих регистров для точного контроля над рабочим циклом и частотой.
Расшифровка и определение ШИМ
Модуляция ширины импульса означает, что ширина импульса возникает строго в прямоугольной волне.
Это улучшает управление двигателем. Вместо чистого сигнала постоянного тока к двигателю используется серия импульсов. Они могут находиться на максимальном напряжении, но только на долю секунды. Выполнение повторных действий приведет к тому, что двигатель начнет вращаться. Это позволит более комфортно управлять скоростью. Простое применение сигнала постоянного тока не приведет к преодолению трения двигателя и передач, наоборот, запуск будет обрывистый с низкой скоростью.
![]()
Увеличивая частоту импульсов ШИМа на Ардуино, можно выполнять операции на высокой скорости.
Декодер создает этот сигнал для управления двигателем. Это та же концепция, что и функции мощности импульса, находящиеся на блоках питания постоянного тока.
Рассмотрим основные преимущества использования ШИМ Ардуино:
- Эффективность электропитания: индукция обмоток ротора будет усреднять ток (индукторы сопротивляются изменению тока). Транзисторы имеют низкий импеданс при низком падении напряжения и рассеивании мощности. Резистор рассеивает большую мощность (I2R) в виде тепла.
- Управление скоростью: двигатель будет видеть источник с низким импедансом, даже если он постоянно переключается между высоким и низким напряжением. Результат очевиден – двигатель ускоряется. Серийное сопротивление приведет к тому, что двигатель будет испытывать малое напряжение, поэтому легко остановится в нужный момент.
- Цепь управления: для цифровой электроники (например, микроконтроллера ) очень легко включать или выключать напряжение с помощью транзисторов. Аналоговый выход (с электронным или механическим управлением) требует большего количества компонентов и увеличивает рассеивание мощности. Это будет более дорогостоящим вариантом, с точки зрения электроники и требований к электропитанию.
Создать широтно-импульсный модулятор можно на esp8266 шим, на Ардуино УНО и Ардуино Нано шим. То есть для конструирования подойдет любая модель описываемого микроконтроллера.
Формирование аналогового сигнала
AnalogRead – это функция, которая используется для считывания аналоговых значений из аналоговых контактов ШИМа на Ардуино. Плата Arduino UNO имеет 6-канальный 10-битный аналого-цифровой преобразователь (АЦП). Это означает, что АЦП в Arduino UNO будет отображать входные напряжения от 0 до 5 В в целое значение от 0 до 1023.
![]()
Следовательно, функция analogRead возвращает любое значение от 0 до 1023. Синтаксис функции analogRead – analogRead (аналоговый вывод no).
Поскольку мы считываем аналоговые напряжения от потенциометра на выводе A0, нам нужно написать analogRead (A0) в эскизе. Когда он возвращает целочисленное значение, с ним создается временная переменная целочисленного типа данных. Следующая функция – analogWrite. Это функция, которая используется для установки рабочего цикла сигнала ШИМ для любого заданного штыря ШИМ.
Синтаксис функции analogWrite – analogWrite (вывод PWM no, value).
Значение указывает рабочий цикл и должно быть значением от 0 (0 В) до 255 (5 В).
Перейдем к фактическому эскизу схемы управления яркостью светодиода. Окончательный эскиз показан на следующем рисунке.

Из приведенного выше эскиза мы можем легко понять, что значение, возвращаемое функцией analogRead, сохраняется в переменной temp. Это значение будет использоваться для управления рабочим циклом сигнала ШИМ с помощью функции analogWrite.
Но диапазон значений, принимаемых функцией analogWrite, находится в диапазоне от 0 до 255. Следовательно, нам нужно выполнить некоторые математические вычисления, чтобы поместить подходящее значение в функцию analogWrite.
Наконец, вычисленное значение помещается в функцию analogWrite вместе с выводом PWM для получения сигнала PWM.
Когда схема построена, и эскиз загружен в Arduino, мы видим, что, изменяя положение потенциометра, яркость светодиода мы также можем изменить.
Еще один вариант скетча для Ардуино:
Широтно-импульсные модуляторы в Ардуино
Чтобы использовать частотный ШИМ на Arduino Uno, нужно всего лишь установить один из ШИМ-выводов в качестве выхода, затем вызывать команду analogWrite и установить уровень. Частота установлена примерно на 500 Гц, поэтому не нужно беспокоиться об этой части.
Мы выбираем контакт под номером 3, устанавливаем его, как output, и analogWrite значение для него. При выборе выхода у нас есть 256 уровней на выбор. Уровень рабочего цикла можно установить между номерами 0 и 255, где 0 – рабочий цикл 0 %, а 255 – 100 % рабочего цикла.
Последний вывод микроконтроллера на плате Arduino Uno составляет 5 В. Чтобы установить светодиод, который мы выбрали для полной яркости, нам необходимо подать напряжение 3,3 В и 15 мА тока. Для этого мы понижаем напряжение на резисторе 100 Ом.
Увеличение частоты и разрядности ШИМ Ардуино
Для изменения частоты ШИМа Ардуино в большую сторону необходимо обратиться к следующей инструкции.
Когда высокочастотный ШИМ-сигнал фильтруется, его небольшой компонент всегда будет проходить через фильтр. Это происходит потому, что конденсатор слишком мал, чтобы полностью его фильтровать. Можно было бы выбрать большую комбинацию конденсаторов и резисторов, но тогда потребуется долгое время для достижения надлежащего выходного напряжения при зарядке конденсатора.
Это значительно ограничило бы то, как быстро сигнал может измениться и быть видимым на выходе. Поэтому нужно выбрать разумное значение напряжения пульсации. Популярным приложением было бы изменение напряжения MOSFET. Поскольку МОП-транзисторы являются устройствами, контролирующими напряжение, можно легко управлять ими с помощью нашего микроконтроллера с ШИМ и фильтром нижних частот. На выходе будет присутствовать любое пульсационное напряжение, присутствующее на входе.

Рис.: а) структура МОП ПТ с индуцированным каналом. б) графическое изображение.
В этом примере предположим, что MOSFET будет управлять не критической нагрузкой, такой, как светодиод высокой мощности. В этом случае нам просто нужно оставаться в разумных пределах, поэтому пиковый ток в светодиоде не будет превышен. В этом случае пульсация в 0,1 вольта была бы более чем достаточной.
Примеры использования ШИМ на Ардуино
Широкополосная широтно-импульсная модуляция является способом кодирования напряжения на фиксированную несущую частоту. Он обычно используется для радиоуправляемых устройств. Каждый тип схемы модуляции имеет свои преимущества и недостатки.
AM-модуляция была первым типом модуляции, используемой для радиопередач. Самая простая схема модуляции для реализации требует только одного транзистора или усилителя вакуумной трубки, как это было сделано в первые дни с момента создания радио.
С необходимостью цифровой связи был изобретен новый метод модуляции – ШИМ. Этот метод обладает той же помехоустойчивостью, что и радиоволны. Самая большая разница – простота и цифровая природа модуляции. Вместо того, чтобы изменять частоту модуляции с напряжением, выход просто включается и выключается с фиксированной частотой. Процент времени включения пропорционален сигнальному напряжению.
Широтно-импульсная модуляция (сокр. ШИМ, от англ. PWM - Pulse Width Modulation) является технологией, позволяющей изменять ширину импульсов в то время как частота следования импульсов остается постоянной. В настоящее время она применяется в разнообразных системах контроля и управления, а также в различных приложениях, таких как, к примеру, управление скоростью вращения двигателей, измерениях, управление мощностью чего-либо, связь и др.
Также при использовании ШИМ можно генерировать аналоговые сигналы используя цифровые сигналы. В данной статье мы рассмотрим основы применения широтно-импульсной модуляции (ШИМ) в микроконтроллере ATmega16 (семейство AVR) на примере изменения интенсивности свечения светодиода. Данный пример уже рассматривался на нашем сайте в этой статье (более подробная и наглядная статья), но здесь материал изложен немного по другому – у вас есть возможность выбрать какой из этих материалов использовать.
Контакты ШИМ в микроконтроллере AVR ATmega16
Микроконтроллер Atmega16 имеет 4 контакта для использования ШИМ модуляции - PB3(OC0), PD4(OC1B), PD5(OC1A), PD7(OC2). Более наглядно они представлены на следующем рисунке.

В данной статье для управления ШИМ в микроконтроллере ATmega16 мы будем использовать его Timer2. С его помощью можно выбрать коэффициент заполнения/скважность (duty cycle) ШИМ в широких пределах. Кратко рассмотрим основы этого процесса.
Что такое ШИМ сигнал
ШИМ – это сигнал с различными интервалами ON и OFF сигнала (различными продолжительностями включения). Время, в течение которого сигнал имеет высокий уровень, называется временем включения (“on time”), а время, в течение которого сигнал имеет низкий уровень - время выключения (“off time”). У ШИМ сигнала есть два параметра, которые мы рассмотрим далее.
Коэффициент заполнения (скважность) ШИМ
Процент времени, в течение которого ШИМ сигнал имеет высокий уровень, называется коэффициентом заполнения (скважностью). К примеру, коэффициент заполнения ШИМ сигнала с периодом (длительностью) 100 мс, в котором в течение 50 мс сигнал имеет высокий уровень и в течение 50 мс имеет низкий уровень, равен 50%. Аналогично, если для такой же длительности (100 мс) сигнал 25 мс остается на высоком уровне и 75 мс на низком, то коэффициент заполнения для такого сигнала будет равен 25%. Для его определения нам необходимо знать только длительность высокого уровня сигнала (длительность низкого уровня легко определить как разность между периодом сигнала и длительность сигнала высокого уровня). Более наглядно ШИМ сигнал представлен на следующем рисунке.
Формула для расчета коэффициента заполнения/скважности (Duty Cycle) выглядит следующим образом:
Duty Cycle (%) = On Time/(On Time + Off Time)
Таким образом, изменяя коэффициент заполнения ШИМ сигнала мы можем изменять интенсивность свечения светодиода.
Выбор режима ШИМ
После выбора нужного нам коэффициента заполнения необходимо выбрать еще режим ШИМ – то есть то, каким образом ШИМ будет работать. Существует три типа ШИМ:
- Быстрая ШИМ (Fast PWM).
- ШИМ с коррекцией фазы (Phase Correct PWM).
- ШИМ с коррекцией фазы и частоты (Phase and Frequency Correct PWM).
Быстрая ШИМ используется в случаях когда нам не важна фаза импульсов, например, управление скоростью вращения двигателя или яркостью свечения светодиода.
Для генерации быстрой ШИМ нам необходимо будет запустить на таймере счет и когда он досчитает до определенного значения сбрасывать значение таймера снова в ноль. Таким образом мы установим период следования ШИМ импульсов. Таким образом мы можем контролировать импульс, устанавливая высокое значение сигнала когда счетчик таймера досчитает до определенного значения. А когда счетчик будет возвращаться в 0 на это время сигнал будет низкого уровня. Таким образом, мы имеем большую гибкость в управлении ШИМ сигналом используя всего лишь один таймер.
Необходимые компоненты
- Микроконтроллер ATmega16 (купить на AliExpress).
- Программатор AVR-ISP (купить на AliExpress), USBASP (купить на AliExpress) или другой подобный.
- Кварцевый генератор на 16 МГц (купить на AliExpress).
- Конденсатор 100 нФ (2 шт.) (купить на AliExpress).
- Конденсатор 22 пФ (2 шт.) (купить на AliExpress).
- Светодиод (2 шт.) (купить на AliExpress).
- Кнопка.
- Макетная плата.
- Соединительные провода.
- Источник питания с напряжением 5 Вольт.
Схема устройства
Схема устройства приведена на следующем рисунке.

Мы будем использовать для формирования ШИМ сигнала контакт OC2 микроконтроллера ATmega16, поэтому соедините контакт Pin21 (PD7) микроконтроллера со светодиодом.
Программирование ШИМ сигнала в микроконтроллере ATmega16 на языке С (Си)
Полный текст программы приведен ниже, а в этом разделе поясним ключевые особенности программы. Видео, демонстрирующее работу схемы, приведено в конце статьи. На видео вы можете видеть как яркость свечения светодиода будет изменяться постепенно в зависимости от изменения коэффициента заполнения ШИМ.
Начать программирование ШИМ ATmega16 необходимо с установки нужного значения регистра Таймера 2 – его биты приведены на следующем рисунке. Изменяя данные биты, мы можем настраивать нужные нам параметры ШИМ.
Читайте также: