
Как сделать шарнир в компасе
Обновлено: 08.07.2024
Библиотека анимации предназначена для имитирования сборки и разборки изделия кривошип. Создаём сборку и вставляем детали: плечо, палец, вал, шпонку, болт с шестигранной головкой, гайку, шайбу, задаем сопряжения соосности, совпадения и параллельности. Используя команду подвинуть компонент собираем всю сборку. Заходим в библиотеку анимации из менеджера библиотек. Жмем запомнить первоначальное состояние компонентов сборки. Добавляем компоненты, строим траектории, считываем положения. Делаем воспроизведение. Можем изменить параметры скорости передвижения. Сохраняем текущий сценарий.
Построим элементы амортизатора и создадим анимацию перемещения и вращения гайки. Создадим все детали по очереди и сделаем ролик в формате видео
Осью вращения малой звездочки будет являться пространственный отрезок. Межосевое расстояние 53 мм. Наложим на звёздочки механическое сопряжение "Вращение/вращение" с передаточным отношением обратным отношению чисел зубьев звездочек (10:15 или 2:3). Приступим к проектированию траектории движения цепи. "Фиксируем" окружности размерами. Строем траекторию основной линией. Имитируем прогиб цепи под действием собственного веса. Задаём радиус только одного "провиса". Второй будет автоматически подстроен под длину цепи. Далее определяемся с точкой привязки первого звена цепи. Выполняем операции сплайн по объекту и точка на кривой. Точка на кривой покажет в каком месте Компас видит начало и конец замкнутого сплайна. Расставляем точки в которых будут находиться ролики цепи. Траектория подстраивается под длину цепи. В этой цепи 26 звеньев.
В цепи для нормального соединения должно быть четное количество звеньев. Вновь строим сплайн по объектам и привязываем его к его началу точку. Скрываем построенный эскиз. Создаем новый эскиз к которому будут привязаны звенья цепи. Проецируем в эскиз пространственную точку и сплайн по объектам. Вновь расставляем по траектории точки, не расстоянии друг от друга, равным шагу цепи. Создаём переменную "А", отвечающую за положение пространственной точки на сплайне. Приступаем к позвенной сборке цепи. Накладываем сопряжения: соосности ролика и точки эскиза, соосности соседних звеньев, совпадение плоскостей симметрии звена и звёздочки. Последнее звено мы не замыкаем с первым. Оно должно стать соосным последней построенной точке в эскизе. При этом первая и последняя точка у нас совпадают. Накладываем сопряжение соосности.
Приступаем к анимации. Сделаем так, чтобы цепь совершила полный оборот и звёздочки двигались синхронно с ней. Если цепь из 26 звеньев сделает полный оборот, то звёздочка с 15 зубьями повернется на угол: (26 звеньев х 360 градусов) / 15 зубьев = 624 градуса. Устанавливаем тот же интервал времени, что и для звездочки, и значения, в пределах которых, будет изменяться наша переменная.
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
Отписаться от уведомлений вы всегда сможете в профиле автора.
Статья относится к принтерам:
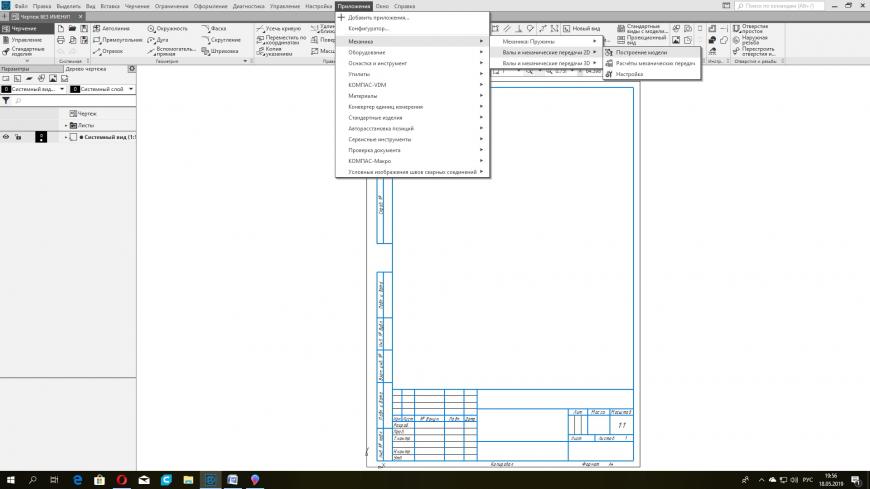
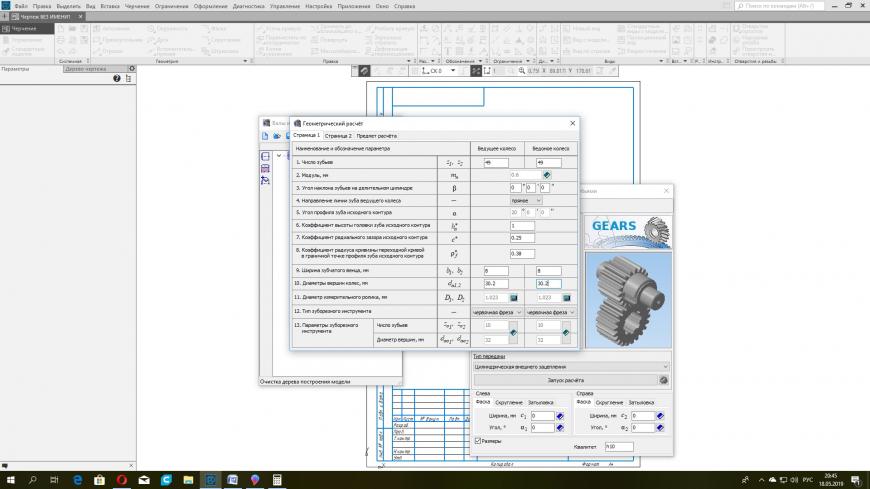
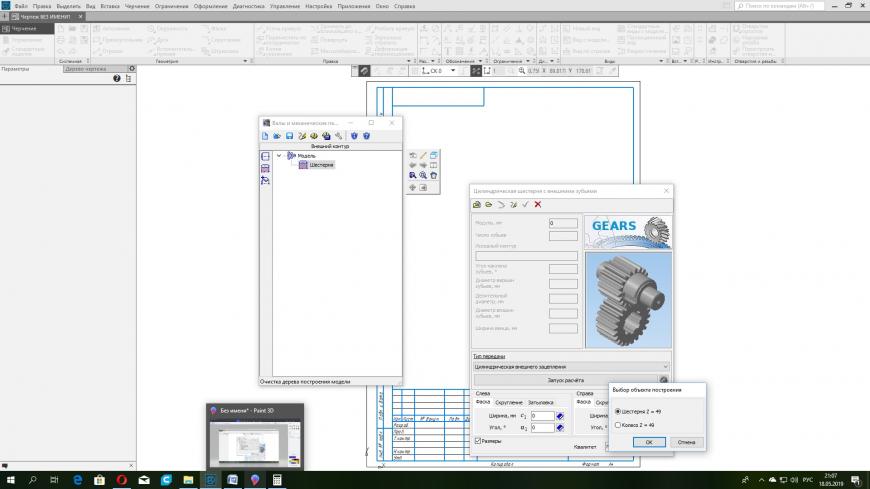
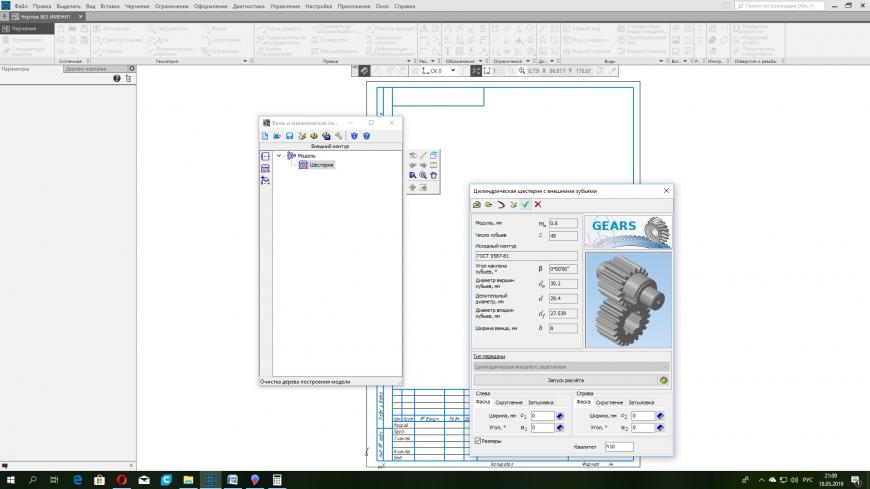
Далее выбираем в разделе приложения выбираем Механика =>Валы и механические передачи=> Построение модели
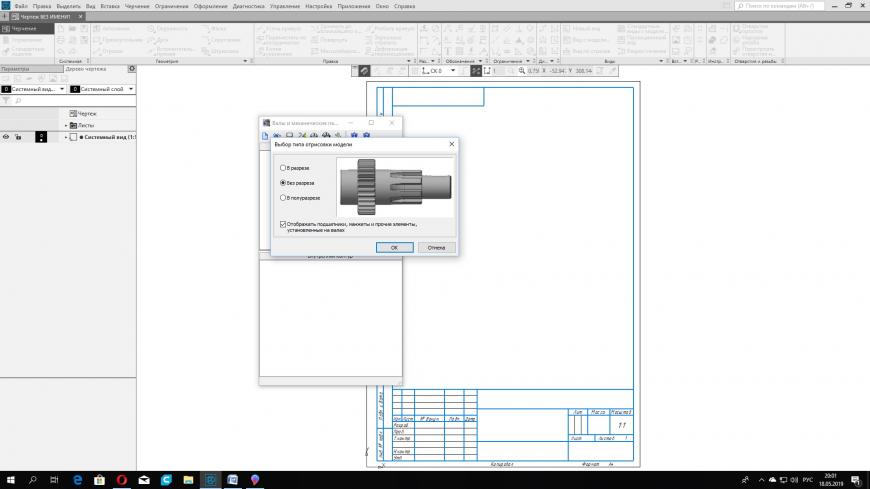
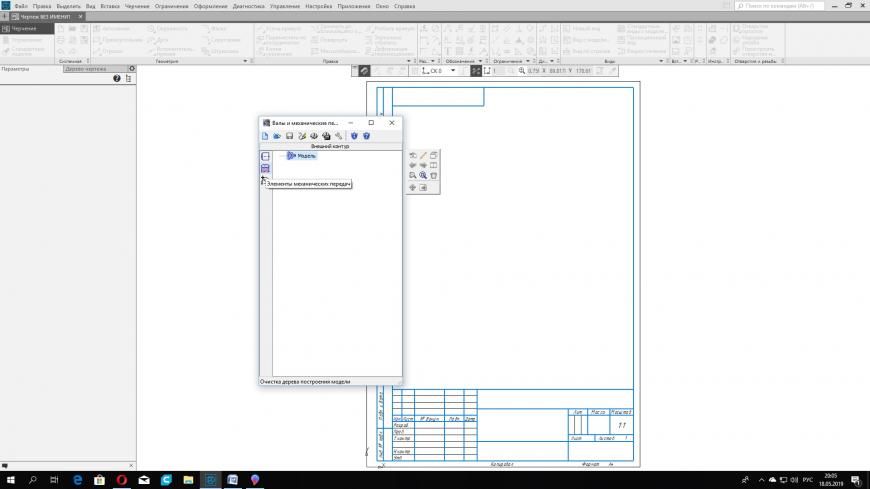
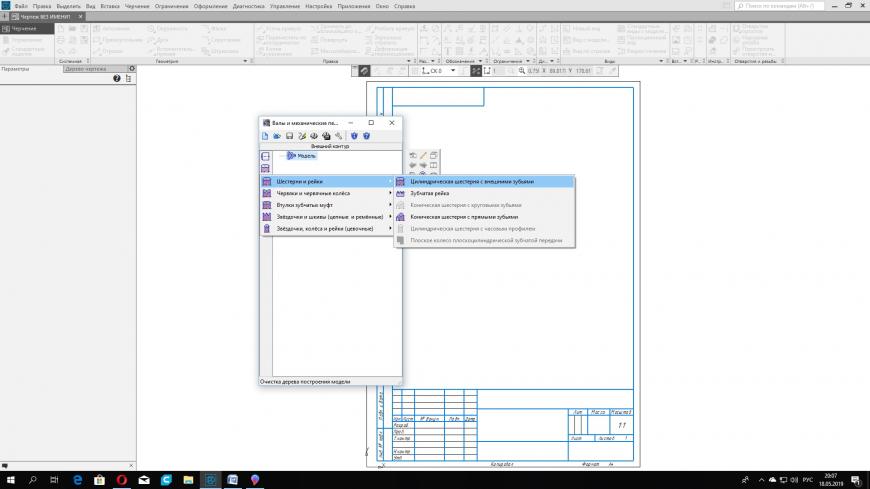
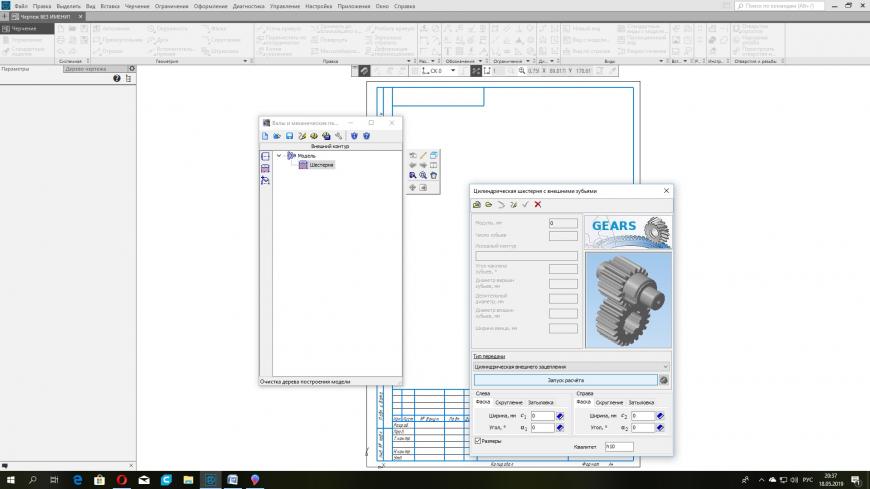
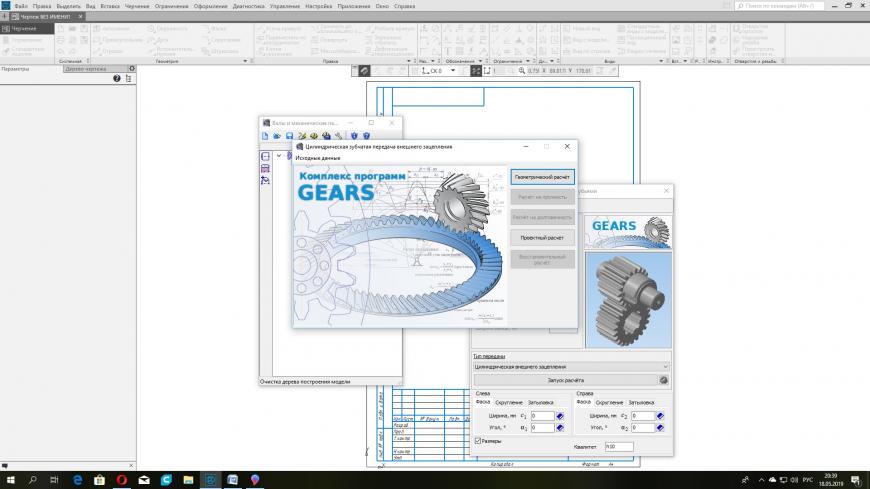
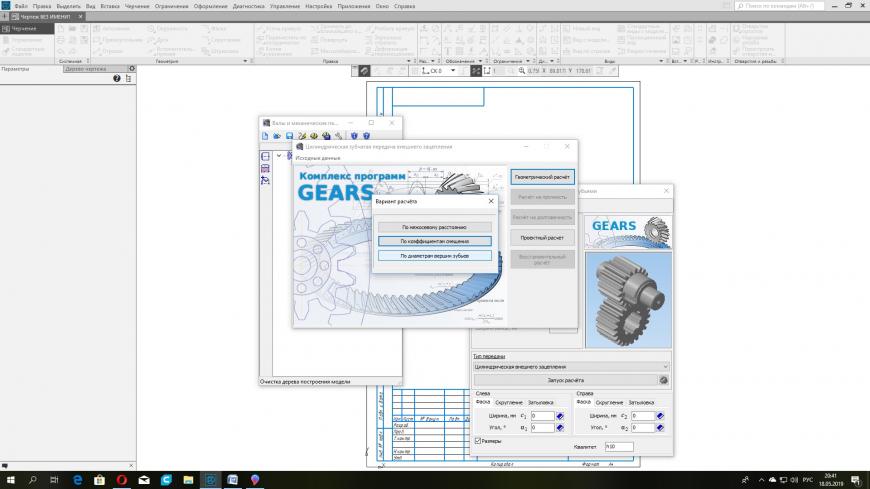
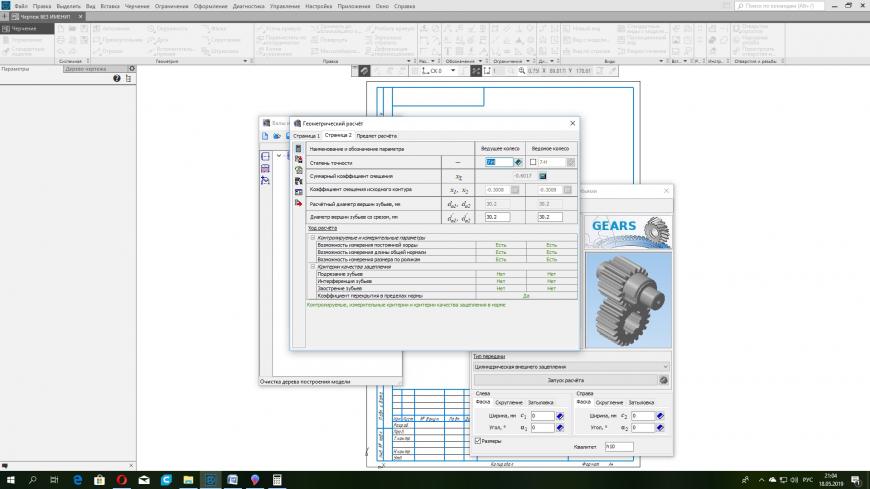
В следующем окне заполняем данные для расчёта и моделирования:
1. Число зубьев пишем в обоих столбцах посчитанные нами 49 шт.
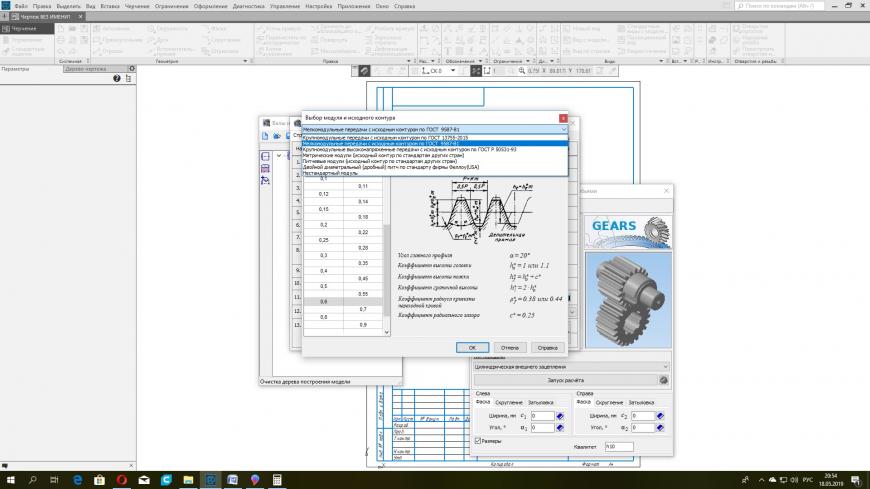
2. Модуль считаем по формуле m=D/(n+2) где D-диаметр вершин зубьев а n-количество зубьев в нашем случае 30,2/51= 0,59. Нажимаем на значок книжечки во втором пункте выходит окно с гостами на ряды модулей выбираем Мелкомодульные передачи с исходным контуром и в ряду модулей близко нам по значению 0,6 нажимаем OK.
3. Пункты 3-8 оставляем без изменения.
4. Пункт 9 это толщина нашего зубчатого венца в нашем случае 8мм указываем в обоих столбцах.
5. Пункт 10 диамметр вершин колес в нашем случае 30,2 указываем в обоих столбцах.
6. Пункт 11 оставляем без изменений.
7. Пункт 10 выбираем ЧПУ в обоих столбцах
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых статьях.
В ходе разработки различных изделий очень часто инженеру приходится сталкиваться со сборно-разборными способами примыкания деталей друг к другу. Основную часть таких соединений составляют болтовые, основной отличительной чертой которых является наличие резьбы. Подтипов таких соединений так же множество, но для примера в текущей статье будет рассмотрено то, как сделать резьбу в Компасе 3д во внутреннем и наружных исполнениях.
К решению вышепоставленной задачи можно подойти несколькими способами: ручным и программным. Отличия второго от первого состоят в первую очередь от трудоемкости процесса, а так же от наличия расширения в самой программе. В актуальных версиях программного комплекса Компас 3д существует специальная библиотека — , с помощью которой сделать резьбу не составляет никакого труда, даже лишний раз в ГОСТ заглядывать не требуется. Но не у всех она доступна. С ручным же исполнением все сложнее, но можно реализовать задуманное даже в простой учебной версии Компаса. Но обо всем по порядку.
Как сделать наружную резьбу в Компасе 3д?
Как уже отмечалось выше, сделать наружную резьбу в Компасе 3д можно различными способами.
Ручной способ создания наружной резьбы в Компасе 3д
В качестве примера будет рассмотрено нанесение наружной резьбы на цилиндр. Основной смысл этого способа заключается в том, что по поверхности цилиндра будет наноситься спираль, по траектории которой будет вырезаться сечение в виде канавки (согласно ГОСТ 24705-2004). Перечень действий по построению представлен ниже.
2. Необходимо ознакомится с п. 4.1 ГОСТ 24705-2004, чтобы по изображенному там рисунку начертить сечение (рис. 1).
Аналогично вычисляются остальные значения диаметров, необходимых для построения. Удобнее всего будет сначала построить профиль резьбы отдельным эскизом в Компасе (рис. 2). В дальнейшем его можно будет просто скопировать и использовать в работе.
4. В начале спирали на торцевой части вала (цилиндра) в плоскости, на которой она лежит, (рис. 6) создается эскиз, в который вставляется уже начерченное ранее сечение резьбы (рис. 7).
Автоматический способ создания наружной резьбы в Компасе 3д
2. Затем следует активировать вышеуказанное приложение для Компаса, после этого в панели параметров будут доступны настройки (рис. 16). После этого откроется новое окно, в котором нужно ввести свои данные (рис. 17). После закрытии этого окна, нужно выделить плоскость, из которой будет идти вал, и поставленную ранее точку. В результате получится следующий результат, как на рис. 18.
Таким образом, вариантов того, как сделать наружную резьбу в Компасе 3д, несколько. Все зависит от наличия специального приложения или времени на проектирование.
Как сделать внутреннюю резьбу в Компасе 3д?
Принцип создания внутренней резьбы аналогичен созданию внешней. Для того, чтобы выполнить внутреннюю резьбу в Компасе на примере втулки, можно воспользоваться следующими шагами.
1. Создаем втулку. Сделать это можно, создав эскиз с кольцом, а затем выдавив его в длину (рис. 19).
2. Для создания траектории, нужно активировать инструмент генерации спирали и нанести ее на внутреннюю часть втулки (рис. 20).
3. На плоскости, перпендикулярной к концу спирали, создать эскиз с резьбой (рис. 21).
Вывод
Технология для того, чтобы сделать резьбу в Компасе 3д наружной или внутренней одинакова. Лучше всего, конечно, пользоваться уже разработанными автоматическими решениями по их генерации, так как это экономит много времени, но, к сожалению, такая функция не всегда имеется в наличии в Компасе, поэтому выходом из этой ситуации будет ручной способ.

Авиационные двигатели ТВ2-117А и ТВ2-117 предназначены для установки на вертолет Ми-8. Двигатели ТВ2-117А и ТВ2-117 по своим техническим данным и эксплуатационным качествам соответствуют современным техническим требованиям, предъявляемым к двигателям данного класса.
Особенностью двигателей является наличие в них свободной турбины (турбины винта) для передачи мощности двигателя на редуктор ВР-8.
Свободная турбина кинематически не связана с турбокомпрессорной частью двигателя.
В силовую установку вертолета входят два двигателя и редуктор ВР-8. В случае необходимости, достаточно мощности одного двигателя для продолжения полета. Правый и левый двигатели взаимозаменяемы при условии разворота выхлопного патрубка.
На вертолет могут устанавливаться двигатели ТВ2-117 и ТВ2-117А. Для замены одних двигателей на другие проведение дополнительных работ не требуется. Разрешается совместная работа на одном вертолете двигателей ТВ2-117 и ТВ2-117А.
На вертолете двигатели присоединяются к одному главному редуктору ВР-8, который передает от двигателей мощность несущему и хвостовому винтам.
Силовая установка вертолета имеет систему автоматического управления оборотами несущего винта и синхронизации мощности обоих двигателей.
Каждый двигатель имеет раздельные системы: смазки, топливопитания, регулирования, противооблединения, и может работать на вертолете самостоятельно при неработающем втором двигателе.
Двигатель состоит из следующих основных узлов:
компрессора с поворотными лопатками входного направляющего аппарата (ВНА) и направляющих аппаратов (НА) первых трех ступеней. На компрессоре установлены клапаны перепуска воздуха из-за VI ступени;
камеры сгорания. На камере сгорания установлены 8 рабочих форсунок и 2 пусковых воспламенителей;
турбины компрессора и свободной турбины, передающей мощность через вал-рессору редуктору ВР-8;
коробки приводов агрегатов. На коробке приводов устанавливаются следующие агрегаты: стартер-генератор ГС-18ТП или ГС-18ТО, топливный насос-регулятор НР-40ВР, командный агрегат КА-40, гидронасос ПН-40Р, датчик Д-2 счетчика оборотов турбокомпрессора, верхний масляный агрегат с фильтром.
Шнековый конвейер
(a. screw conveyor; н. Schneckeforderer; ф. convoyeur а vis, vis transporteuse, couloir helicoidal; и. transportadora de tornillo sin fin, transportador helicoidal, transportador de espiral) - вид конвейера, принцип действия которого основан на перемещении насыпных грузов вращающимся шнеком (винтом) по горизонтальному или наклонному закрытому жёлобу.
Сверло спиральное с цилиндрическим хвостовиком Sandvik R840-1500-30-A0A. CoroDrill® R840 представляют собой цельные твердосплавные сверла для высокопроизводительной обработки отверстий для различных областей применения. Предназначены для высококачественного сверления отверстий во всех материалах, включая стали твердостью до 60 HRC.
Соматографией называется схематическое изображение тела человека-оператора на чертежах.
В задачу соматографии входит анализ рабочих поз, рабочих движений и пропорций человеческого тела.
При помощи конструирования технических образцов фигуры человека, пользуясь известными способами технического черчения и правилами начертательной геометрии в тех основных проекциях с соблюдением анатомических принципов и использования данных антропометрических обследований, анализируются возможности человека – оператора.
Для соматографии могут применяться плоские шарнирные макеты, упрощенные схемы человека.
При разработке сложных с эргономической точки зрения систем иногда применяют метод проектографии, суть которого заключается в проекционном изображении оператора, а также с применением фото- или кинопроекций.
Система управления должна быть надежной в работе, удобной в эксплуатации, иметь оптимальное количество органов управления в безаварийном исполнении в случаях перегрузок или ошибочных действий оператора. За критерии удобства обслуживания принимаются минимальное время, затрачиваемое на выполнение операций управления, обоснованность антропометрическая, небольшие затраты физических сил при манипулировании органами управления, рациональное расположение приборов и органов управления, не требующее излишнего напряжения памяти и внимания оператора.
Органы управления машиной располагают в рабочей зоне согласно логике деятельности человека. При этом самые важные и часто используемые органы следует располагать в зоне оптимального визуального контроля и оптимальной досягаемости. Особо следует располагать аварийные органы управления. Они выполняются отличными от обычных с выделением от них пространственно, но доступными при любом положении оператора. Приборы следует размещать на уровне глаз или немного ниже. От случайного включения их подстраховывают цветом, кодированием, размещением и т.д. Второстепенные органы можно располагать на границах рабочей зоны и визуального контроля. Органы периодической настройки можно выносить за пределы рабочей зоны. Возможно дублирование органов управления частого пользования.
Листовое тело в компасе в первую очередь предназначено для создания разверток, во вторую очередь листовое тело компас 3d предназначено для упрощения создания моделей деталей, имеющих сгибы и вальцовку.
Листовое тело в компасе
Как и любая другая деталь, гнутая деталь начинается с эскиза. Отличительной особенностью такого эскиза является возможность создания гнутой детали всего по двум отрезкам, при этом обечайку можно создать всего по одной окружности. Контур листового тела, как правило, незамкнутый.

Таким образом, эскиз уголка состоит всего из двух отрезков. Для создания листового тела, выбираем в инструментальной панели «Элементы листового тела.

Третий шаг – выбор расстояния, далее выбираем направление стенки внутрь или наружу и собственно толщину стенки, заканчиваем задание параметров радиусом сгиба. Все просто.
Теперь рассмотрим сгиб по линии. Предварительно создаем эскиз в виде одной линии.

Следующий способ построения листового тела – сгиб вдоль ребра листового тела. Достаточно выбрать соответствующую операцию и выбрать ребро, направление, а также задать размеры в виде расстояния, угла и радиуса.

Выбираем именно ребро.
С помощью листового тела можно создавать обечайки, сектора, уголки, швеллера и прочие гнутые и вальцованные детали. В следующих уроках рассмотрим основные принципы работы с такими деталями, а именно вырез в листовом теле, создание пластины в компасе и как сделать развертку в компасе.
Читайте также: