
Энкодер своими руками 360 имп на оборот
Обновлено: 03.07.2024
Поворотный энкодер представляет собой электромеханическое устройство, которое преобразует вращательное движение в цифровую или аналоговую информацию. Он очень похож на потенциометр, но может вращаться бесконечно как по часовой стрелке, так и против часовой стрелки. Существует несколько типов поворотных энкодеров. Двумя основными типами являются абсолютные и относительные (инкрементальные) энкодеры. В то время как абсолютный энкодер выдает значение, пропорциональное текущему углу вала, инкрементальный энкодер выдает шаг движения вала и его направление. Поворотные энкодеры становятся всё более и более популярными в потребительской электронике, особенно в качестве ручек управления, в дополнение к приложениям во многих других областях. Они заменяют собой потенциометры и кнопки навигации, где требуются быстрая навигация, настройка, ввод данных и выбор пункта меню. Некоторые энкодеры также включают в себя встроенную кнопку, которая создает дополнительный вход для процессора, который может использоваться в качестве другой пользовательской команды в интерфейсе управления. На рисунке ниже вы можете увидеть типовой инкрементальный поворотный энкодер с кнопкой включения.

Инкрементальный поворотный энкодер
В данной статье мы покажем вам, как использовать инкрементальный поворотный энкодер в проекте на Arduino. Мы объясним, как бороться с дребезгом контактов и интерпретировать сигналы энкодера в программе микроконтроллера, используя прерывания.
Сигнал квадратурного выхода инкрементального энкодера
Инкрементальный поворотный энкодер во время поворота вала генерирует два выходных сигнала, что также называется квадратурным выходом. В зависимости от направления один сигнал опережает другой. Ниже вы можете увидеть форму выходного сигнала инкрементального поворотного энкодера и ожидаемую последовательность битов.

Сигналы на выходах инкрементального поворотного энкодера при вращении вала по часовой стрелке и против
Как видно из рисунка, оба выхода в изначально находятся в состоянии логической единицы. Когда вал энкодера начинает вращаться в направлении по часовой стрелке, первым падает до логического нуля состояние на выходе A, а затем с отставанием за ним следует и выход B. При вращении против часовой стрелки всё происходит наоборот. Временные интервалы на диаграмме сигнала зависят от скорости вращения, но отставание сигналов гарантируется в любом случае. На основе этой характеристики инкрементального поворотного энкодера мы напишем программу для Arduino.
Фильтрация дребезга контактов механического энкодера
Механические энкодеры имеют встроенные переключатели, которые формируют сигнал на квадратурном выходе во время вращения.

Дребезг контактов на выходе механического энкодера
Когда имеем дело с сигналами энкодера, основной проблемой является дребезг контактов. Он вызывает ошибочное определение направления вращения и величины поворота вала энкодера и делает использование энкодеров проблематичным. Мы можем избавиться от дребезга контактов, отфильтровывая его в программе или используя дополнительные схемы фильтрации.
Фильтрация шума в программном обеспечении микроконтроллера является одним из вариантов фильтрации, но она обладает некоторыми недостатками. Вам необходимо написать более сложный код для обработки шума. Фильтрация займет время обработки и внесет задержки в основной поток программы. Вам может потребоваться установить таймеры, чтобы игнорировать интервалы дребезга контактов. В конце концов, возможно, у вас не получится получить удовлетворительный и надежный результат.
Фильтрация шума с помощью дополнительных аппаратных средств проще, и она останавливает шум еще в его источнике. Вам понадобится RC фильтр первого порядка. На рисунке ниже вы можете увидеть, как выглядит сигнал после использования RC фильтра.

RC фильтр и форма сигнала на его выходе
RC-фильтр замедляет время спада и время нарастания и обеспечивает аппаратное удаление дребезга контактов. При выборе пары резистор-конденсатор вы должны учитывать максимальную частоту вращения. Иначе будет отфильтрован и ожидаемый отклик энкодера.
Простое приложение
Мы создадим приложение, демонстрирующее, как использовать поворотный энкодер в проекте на Arduino. Мы будем использовать энкодер для навигации, ввода данных и выбора. Ниже приведена принципиальная схема приложения.

Принципиальная схема примера приложения с использованием поворотного энкодера на Arduino
Схема построена на базе платы Arduino Uno. Для графического интерфейса используется LCD дисплей Nokia 5110. В качестве средств управления добален механический поворотный энкодер с кнопкой и RC-фильтрами.

Собранная схема примера использования поворотного энкодера на Arduino
Мы разработаем простое программное меню, в котором и продемонстрируем работу поворотного энкодера.
Обработка сигналов энкодера с помощью прерываний
Сигналы энкодера должны быть обнаружены и интерпретированы в программе как можно быстрее, чтобы не блокировать основной поток программы. Мы можем детектировать сигналы путем опроса в основном цикле, или используя прерывания. Опрос не эффективен, так как вам необходимо зарезервировать время и ресурсы в основном цикле, что приводит к дополнительным задержкам. Использование прерываний – это более быстрое и экономичное решение. Мы покажем вам, как использовать прерывания для обработки сигналов энкодера.
В Atmega328 есть два типа прерываний, которые можно использовать для этих целей; внешнее прерывание и прерывание по изменению состояния вывода. Выводы INT0 и INT1 назначены на внешнее прерывание, а PCINT0 - PCIN15 назначены на прерывание по изменению состояния вывода. Внешнее прерывание может определить, произошел ли спад или нарастание входного сигнала, и может быть запущено при одном из следующих состояний: нарастание, спад или переключение. Для прерывания по изменению состояния выводов существует гораздо больше аппаратных ресурсов, но оно не может обнаруживать нарастающий и спадающий фронты, и оно вызывается, когда происходит любое изменение логического состояния (переключение) на выводе.
Чтобы использовать прерывание по изменению состояния выводов, подключите выходы поворота энкодера A и B к выводам A1 и A2 , а выход кнопки – к выводу A0 платы Arduino, как показано на принципиальной схеме. Установите выводы A0 , A1 и A2 в режим входа и включите их внутренние подтягивающие резисторы. Включите прерывание по изменению состояния выводов в регистре PCICR и включите прерывания для выводов A0 , A1 и A2 в регистре PCMS1 . При обнаружении любого изменения логического состояния на одном из этих входов будет вызовано ISR(PCINT1_vect) (прерывание по изменению состояния выводов).
Поскольку прерывание по изменению состояния выводов вызывается для любого логического изменения, нам необходимо отслеживать оба сигнала (и A, и B) и обнаруживать вращение при получение ожидаемой последовательности. Как видно из диаграммы сигналов, движение по часовой стрелке генерирует A = …0011… и B = …1001… . Когда мы записываем оба сигналы в байты seqA и seqB , сдвигая последнее чтение вправо, мы можем сравнить эти значения и определить новый шаг вращения.
Вы можете увидеть часть кода, включающую инициализацию и функцию обработки прерывания по изменению состояния выводов.
Использование внешнего прерывания делает процесс более простым, но поскольку для этого прерывания назначено только два вывода, то вы не сможете использовать его для других целей, если займете его энкодером. Чтобы использовать внешнее прерывание, вы должны установить выводы 2 ( INT0 ) и 3 ( INT1 ) в режим входа и включить их внутренние подтягивающие резисторы. Затем выберите вариант спадающего фронта для вызова обоих прерываний в регистре EICRA . Включите внешние прерывания в регистре EIMSK . Когда начнется вращение вала энкодера, сначала ведущий сигнал падает до логического нуля, а второй сигнал некоторое время остается на уровне логической единицы. Поэтому нам нужно определить, какой из сигналов во время прерывания находится в состоянии логической единицы. После того, как ведущий сигнал упал до логического нуля, через некоторое время второй сигнал также упадет до логического нуля, что вызовет другое прерывание. Но этот раз и другой (ведущий) сигнал будет на низком логическом уровне, что означает, что это не начало вращения, поэтому мы игнорируем его.
Ниже вы можете увидеть часть кода, включающую в себя инициализацию и функцию обработки внешнего прерывания.

Макет для проверки кода работы с инкрементальным поворотным энкодером на Arduino
Как подключить инкрементальный энкодер к Ардуино
Часто в устройствах на микроконтроллерах нужно организовать управление пунктами меню или реализовать какие-то регулировки. Есть множество способов: использовать кнопки, переменные резисторы или энкодеры. Инкрементальный энкодер позволяет управлять чем-либо посредством бесконечного вращения ручки. В этой статье мы рассмотрим, как заставить работать инкрементальный энкодер и Arduino.
Особенности инкрементального энкодера
Инкрементальный энкодер, как и энкодеры любых других типов представляют собой устройство с вращающейся рукоятью. Отдаленно он напоминает потенциометр. Основным отличием от потенциометра является то, что рукоять энкодера вращается на 360 градусов. У него нет крайних положений.
Энкодеры бывают разных типов. Инкрементальный отличается тем, что с его помощью нельзя узнать положение рукояти, а только сам факт вращения в какую-то сторону – влево или вправо. По количеству импульсов сигнала вы уже можете рассчитать на какой угол он повернулся.
Таким образом вы можете передать микроконтроллеру команду, управлять меню, уровнем громкости, например, и так далее. В быту вы могли их видеть в автомагнитолах и другой технике. Его используют в качестве многофункционального органа регулировки уровней, эквалайзера и навигации по меню.
Принцип работы
Внутри инкрементального энкодера есть диск с метками и ползунки, которые с ними соприкасаются. Его строение подобно потенциометру.
На рисунке сверху вы видите диск с метками, они нужны для прерывания электрического соединения со подвижным контактом, в результате вы получаете данные о направлении вращения. Конструкция изделия не столь важна, давайте разберемся в принципе работы.
Какой сигнал мы получим? В зависимости от направления вращения логическая единица сначала появится на выводе A или B, таким образом мы получаем сдвинутый по фазе сигнал, а этот сдвиг позволяет определить в какую сторону. Сигнал получается в виде прямоугольной формы, а управление микроконтроллером происходит после обработки данных направления вращения и количества импульсов.
Вот пример цоколевки реального энкодера:
Научитесь разрабатывать устройства на базе микроконтроллеров и станьте инженером умных устройств с нуля: Инженер умных устройств
Интересно:
Неисправный энкодер можно заменить двумя кнопками без фиксации, и наоборот: самоделку управление в которой осуществляется двумя такими кнопками можно доработать, установив энкодер.
На видео ниже вы видите чередование сигнала на выводах – при плавных вращениях светодиоды загораются в последовательности отраженной на предыдущем графике.
Не менее наглядно это проиллюстрировано на следующей анимации (нажмите на рисунок):
Энкодер может быть и оптическим (сигнал формируется излучателями фотоприемниками, см. на рисунке ниже), и магнитным (работает на эффекте Холла). В таком случае у него нет контактов и больше срок службы.
Как уже было сказано, направление вращения можно определить по тому, какой из выходных сигналов раньше изменился, а вот так это выглядит на практике!
Точность управления зависит от разрешения энкодера – количества импульсов на оборот. Количество импульсов может быть от единиц до тысяч штук. Так как энкодер может выступать в качестве датчика положения, то чем больше импульсов – тем точнее будет происходить определение. Этот параметр обозначается как PPR – pulse per revolution.
Но есть небольшой нюанс, а именно похожее обозначение LPR – это количество меток на диске.
А количество обрабатываемых импульсов. Каждая метка на диске даёт 1 прямоугольный импульс на каждом из двух выходов. У импульса есть два фронта – задний и передний. Так как выхода два то с каждого из них мы в сумме получаем 4 импульса значения которых вы можете обработать.
Явно полезное:

Подключаем энкодер к Arduino
Мы разобрались с тем что нужно знать об инкрементальном энкодере, теперь давайте узнаем, как подключить его к Ардуино. Рассмотрим схему подключения:
Модуль энкодера – это плата на которой расположен инкрементальный энкодер и подтягивающие резисторы. Пины можно использовать любые.
Если у вас не модуль, а отдельный энкодер, вам всего лишь нужно добавить эти резисторы, схема не будет ничем отличаться принципиально. Для проверки направления вращения и работоспособности его в связке с Ардуино мы можем прочитать информацию с последовательного порта.
Разберем код подробнее, по порядку. В void setup() мы объявили что будем использовать связь через последовательный порт, а затем установили пины 2 и 8 в режим входа. Номера пинов выбираете сами исходя из вашей схемы подключения. Константа INPUT_PULLUP выставляет режим входа, у ардуино есть два варианта:
INPUT – вход без подтягивающих резисторов;
INPUT_PULLUP – подключение ко входу подтягивающих резисторов. Внутри микроконтроллера уже есть резисторы, через которые вход соединяется с плюсом питания (pullup).
Если вы используете резисторы для подтяжки к плюсу питания как изображено на схемах, приведенных выше или используете модуль энкодера – пользуйтесь командой INPUT, а если по какой-то причине не можете или не хотите использовать внешние резисторы – INPUT_PULLUP.
Если вы внимательно прочли строки, то наверняка заметили, что в одном случае первый символ приобретал значение, а в другом случае сначала изменялся второй символ.
Заключение
Инкрементальные энкодеры нашли широкое практическое применение в усилителях для акустических систем – их использовали в качестве органа управления регулятора громкости, в автомагнитолах – для регулировки параметров звука и навигации по меню, в компьютерных мышках с его помощью вы ежедневно прокручиваете страницы (на его вале установлено колесико). А также в измерительных инструментах, ЧПУ станках, роботах, в сельсинах не только в качестве органов управления, но и измерения величин и определения положения.
Энкодер - это устройство преобразования механического перемещения или угловых изменений положения в цифровой сигнал. В статье рассматривается самый популярный в DIY сообществе инкрементальный энкодер EC11 с кнопкой. При его вращении на выходах A и B формируются TTL сигналы в виде импульсов сдвинутые между собой по фазе на 90 градусов. Таким образом с его помощью, можно определить направление и скорость вращения, а так же рассчитать угол поворота. В отличие от потенциометров, энкодер KY-040 гораздо надежней и долговечный.

Немного подробностей
Собирая один из проектов с использованием encoder. Я не смог найти код для Ардуино выполняющий все мои условия. Так как для проекта нужно обрабатывать следующие команды: "Вращение без нажатия", "Вращение с нажатием", "Нажатие" и "Длинное нажатие", а так же требуется стабильная работа энкодера. Скетчи использующие один пин с прерыванием INT0 или INT1, работают отвратительно и при вращении вала энкодера вылетает очень много ошибок. Код без использования прерываний работает стабильно, но он не работает в фоновом режиме, его нужно встраивать в тело основной программы, что в свою очередь приводит к не своевременному срабатыванию обработчика и пропускам при вращении энкодера. Еще хуже обстоят дела с обработкой нажатия с вращением вала энкодера и обычным с нажатием. Пришлось написать свой код обработки, который исключает описанные выше проблемы. С дребезгом контактов я не стал бороться программно, так как это приводит к задержкам обработки. Проще и надежней использовать керамические конденсаторы.
Схема подключения энкодера к Ардуино
Для считывания сигналов с выходов EC-11, нужно использовать три цифровых входа Arduino. В схеме подключения я использовал редко используемые мной в своих проектах выводы Arduino(A1, A2 и A3). Внешние подтягивающие резисторы отсутствуют, так как я использовал внутреннюю подтяжку микроконтроллера. Конденсаторы нужны для гашения импульсов дребезга контактов. Если у вас новый и хороший энкодер, то можно обойтись и без них. Но на кнопку в любом случае потребуется конденсатор, так как ее дребезг неизбежен.
Используемые в схеме компоненты:

Скетч для Ардуино
Для того что бы отслеживать изменение положения энкодера в фоновом режиме, я использую прерывание PCINT1. Обработка всех функций происходит в прерывании, обработчик в зависимости от произошедшего действия изменяет переменную enc_state. Если значение переменной enc_state=0 - ничего не произошло, enc_state=1 - экодер вращался без нажатия, enc_state=2 - экодер вращался с нажатием, enc_state=3 - было нажатие на кнопку, enc_state=4 - было длинное нажатие на кнопку, Прерывание будет срабатывать каждый раз по изменению состояния входов, как с высокого уровня на низкий, так и наоборот. То есть при одном щелчке энкодера прерывание сработает 4 раза. Или по 2 раза для каждого из входов. Но обработчик выдаст сигнал поворота только 1 раз на все 4 прерывания.
Код обработчика при каждом срабатывании записывает в переменную lastcomb состояние входов, к которым подключен энкодер. И ждет состояние когда выходы A и B будут замкнуты на GND, это гарантированный сигнал того, что энкодер вращается. После того как этот сигнал получен, обработчик проверяет в какую сторону было вращение. Для этого он сравнивает его предыдущее значение из переменной lastcomb и в зависимости от фазы сдвига определит в какую сторону был поворот ротора. Как я писал ранее, сложнее всего отслеживать нажатие кнопки.
Так как использовать определенные тайминги я не планировал, потому, что они неизбежно приводят длительным задержкам работы обработчика и основной программы, или требуют использование таймера, которых в микроконтроллере всего 3 шт. их, как правило никогда не хватает. Собственно проблема состояла в том, чтобы разделить "нажатие с последующим вращением" от простого нажатия. В итоге как вы уже можете убедиться, я решил эту задачу. Оптимизацией кода я не стал заниматься, потому как все работает и меня все устраивает. Для наглядности в коде все действия с энкодером, отображаются в Serial мониторе программы Adruino IDE.
Заключение
Результат работы кода меня порадовал и теперь я могу продолжить работу над своим новым проектом, который скоро здесь выложу. Надеюсь эта короткая статья вам понравилась и вы сможете воспользоваться моей наработкой в своих самоделках.
Если у Вас остались вопросы и замечания, пишите их в комментариях. Я с удовольствием на них отвечу.
Сегодня я хочу рассказать об энкодерах вращения, какие они бывают, как работают и где применяются. И для примера рассмотрим подключение модуля KY-040 к Ардуино. А пока начнем с теории.

Что такое энкодер вращения
Энкодер вращения - это электромеханическое устройство, предназначенное для преобразования угла поворота вращающегося объекта в электрический сигнал (цифровой или аналоговый). Такие устройства находят широкое применение в промышленности, в роботостроении, автомобилестроении, компьютерной технике и т.п.
Энкодеры вращения можно разделить по принципу действия на оптические, магнитные, емкостные, индуктивные, резистивные и механические; по способу выдачи информации на абсолютные и инкрементные.
Принцип работы
Работу энкодера вращения проще всего объяснить на примере оптического энкодера. Представьте себе вал электродвигателя, на котором закреплен диск с прорезями. С одной стороны диска расположен светоизлучающий элемент, луч света проходит через прорези и регистрируется фотоэлементом, расположенным с другой стороны (устройство, состоящее из спаренных светоизлучающего и принимающего элементов, называется фотопрерыватель). При вращении диска луч прерывается, в результате чего на выходе фотоэлемента мы получим меандр - сигнал прямоугольный формы. И частота меандра будет пропорциональна скорости вращения диска. Таким образом можно судить о скорости вращения вала электродвигателя.
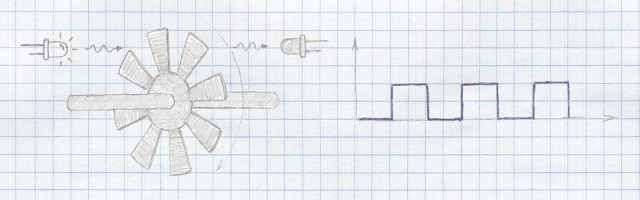
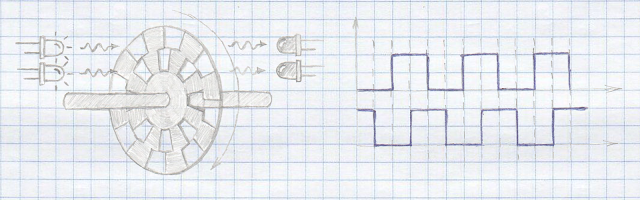
На практике смещения сигналов добиваются не за счет особого расположения фотопрерывателей, а путем добавления второй полосы с прорезями или прозрачными и непрозрачными участками. Участки на двух полосах расположены так чтобы обеспечить сдвиг сигнала по фазе на 90 градусов, поэтому работающие по такому принципу энкодеры называются квадратурными.
На этом же принципе основаны механические энкодеры, только вместо фотопрерывателей в них используются скользящие контакты. Основным недостатком таких энкодеров является дребезг контактов, который может приводить к неправильному подсчету сигналов. Кроме того скользящие контакты подвержены износу. Все это ограничивает область применения механических энкодеров.
Магнитные энкодеры строятся на базе магниточувствительных элементов, таких как датчики Холла или магниторезистивные датчики. Они просты в изготовлении, лишены недостатков контактных энкодеров и мало чувствительны к внешним факторам. Но все же проигрывают в точности емкостным, индуктивным и оптическим энкодерам.
Емкостные энкодеры имеют в своем составе диск асиметричной формы, который при вращении изменяет емкость между двумя электродами. Это изменение регистрируется и используется для определения углового положения. Емкостные энкодеры так же просты в изготовлении и надежны в эксплуатации, из внешних факторов чувствительны только к изменению влажности.
Индуктивные энкодеры работают в магнитном поле и используют явление электромагнитной индукции. Благодаря устойчивости к внешним факторам подходят для использования в неблагоприятной среде, когда другие энкодеры могут оказаться ненадежными.
Резистивный энкодер работает по тому же принципу что и обычный потенциометр: электрический сигнал на его выходе пропорционален положению ручки энкодера. Собственно и сами потенциометры могут использоваться для отслеживания углового положения, например, их можно увидеть в сервомашинках:

Абсолютные и инкрементные энкодеры
Приведенный выше пример оптического энкодера вращения генерирует на выходе импульсы, по которым принимающее устройство определяет текущее положение вала путём подсчёта числа импульсов счётчиком. Такие энкодеры называют инкрементными или накапливающими. Сразу же после включения инкрементного энкодера положение вала неизвестно. Для привязки системы отсчёта к началу отсчёта инкрементные энкодеры могут иметь нулевые (референтные) метки, через которые нужно пройти после включения оборудования. К недостаткам также относится то, что невозможно определить пропуск импульсов от энкодера по каким-либо причинам. Это приводит к накоплению ошибки определения угла поворота вала до тех пор, пока не будет пройдена нуль-метка.
Этих недостатков лишены абсолютные энкодеры. Они выдают на выходе сигналы, которые можно однозначно интерпретировать как угол поворота. Как и в приведенной выше схеме инкрементного энкодера, абсолютный оптический энкодер содержит светоизлучающий и принимающий элементы. Существенное отличие в используемом диске: он имеет прозрачные и непрозрачные участки на нескольких радиусах. Световые лучи, проходя через диск, засвечивают те или иные участки фоточувствительного элемента, который в свою очередь формирует на выходе соответствующие сигналы, уникальные для каждого положения диска.
Для кодирования углового положения абсолютные энкодеры используют диски с двоичными кодами и кодами Грея. Двоичный код удобен тем, что не требует дополнительных преобразований. В целом же использование кода Грея предпочтительнее т.к. он более устойчив к ошибкам чтения за счет того, что каждое следующее значение отличается от предыдущего только в одном разряде. При этом вероятность считывания совершенно неверного значения полностью исключена. Более подробно о коде Грея можно почитать в Википедии. На следующем изображении приведены примеры дисков для инкрементного квадратурного и абсолютного энкодеров.

Этот пример наглядно иллюстрирует принцип кодирования углового положения на диске абсолютного энкодера. Для каждого положения вала формируется свой уникальный код. В данном случае для кодирования 16 положений потребовалось 4 концентрических дорожки. При увеличении разрешения абсолютного энкодера возрастает число дорожек и разрядность считываемого значения. Поэтому наряду с параллельным интерфейсом в абсолютных энкодерах широко применяются последовательные интерфейсы, такие как Profibus, CANopen, SSI, BiSS, ISI, Profinet, PWM, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, EtherCAT. Также существуют энкодеры, возвращающие значение углового положения в виде аналогового сигнала.
Абсолютные энкодеры могут быть однооборотными и многооборотными. Если однооборотные способны только выдавать значение угла поворота, то многооборотные позволяют также определять количество оборотов. Это возможно за счет наличия в их составе редуктора и дополнительного диска, который изменяет свое положение при каждом полном обороте вала энкодера.
Подключение инкрементного энкодера к Ардуино
Теперь после небольшой теоретической части можно перейти к практике. Попробуем подключить к Ардуино инкрементный энкодер вращения. У меня в распоряжении имеется модуль KY-040 (вроде того, что изображен на фото в начале этой статьи), который представляет из себя энкодер с разрешением 20 шагов на оборот со встроенной кнопкой, распаянный на плату с подтягивающими резисторами. Это идеальный компонент для организации меню: вращение вала энкодера можно интерпретировать как перемещение курсора по элементам меню, а нажатие кнопки - выбор конкретного элемента. Позже я приведу пример создания такого меню, а сейчас разберемся с подключением энкодера к Ардуино.

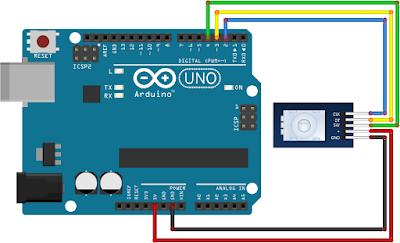
- CLK и DT - выводы энкодера, они подтянуты к линии питания резисторами 10кОм;
- SW - вывод кнопки, при нажатии вывод замыкается на землю;
- + и GND - линии питания и земли. Данный энкодер является механическим, питание для него не требуется, линии нужны для цепи с подтягивающими резисторами.
Подключим энкодер к Ардуино по следующей схеме:
Существует 2 способа работы с энкодером: с использованием прерываний и путем опроса выводов энкодера в теле программы. Первый способ требует четкий сигнал на выводах энкодера, без помех. Поскольку данный энкодер является механическим, сигнал на его выходах искажен дребезгом контактов и не может быть использован для генерации прерываний (по крайней мере без дополнительных средств для восстановления сигнала, о чем будет рассказано позже). Поэтому сейчас реализуем второй способ и бороться с дребезгом будем программно. Загрузим в Ардуино нижеприведенный код, ссылка для скачивания.
Для удобства работы код опроса энкодера помещен в отдельную функцию. В таком виде я использую ее в большинстве проектов с энкодером, достаточно скопировать функцию с переменными в новый скетч и в цикле опрашивать состояние энкодера. Подавление дребезга реализовано за счет добавления в функцию условия, которое обеспечивает опрос энкодера не чаще 1 раза в 5мс.
Подобный код можно увидеть на различных сайтах, и везде говорится что вывод CLK - это сигнал A, а вывод DT - это B. Почему-то на моих энкодерах это не так и сигналы поменяны местами. Этот момент учтен в функции при чтении значений с контактов. И если вдруг у Вас окажется, что при вращении вала энкодера по часовой стрелке значение переменной counter будет уменьшаться, то замените в функции строки чтения значений с выводов pin_CLK и pin_DT на следующие:
Итак, прошиваем код в Ардуино, запускаем монитор порта и вращаем ручку энкодера. Должно получиться что-то вроде этого:
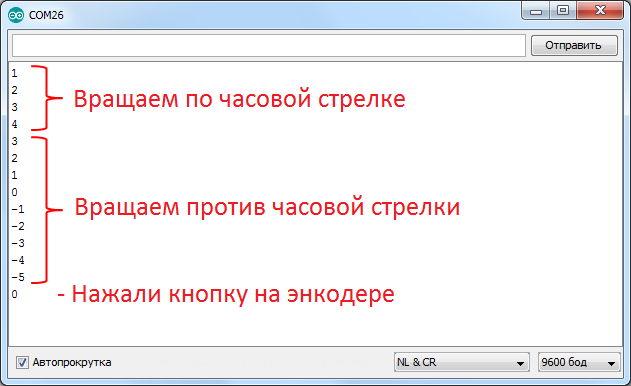
Но такой результат будет при не слишком быстром вращении, все-таки работаем с дешевым энкодером. В любом случае этого вполне достаточно для многих проектов на Ардуино. В следующий раз попробуем избавиться от контактного дребезга и задействовать прерывания для подсчета импульсов энкодера.
Читайте также: