
Энкодер для станка своими руками
Добавил пользователь Владимир З. Обновлено: 18.09.2024
Игорь! Вы не поверите - не "круто", а намного дешевле! Более-менее приличный оптический энкодер (для SW-2010), стоит 1000-1200 руб. Народ пишет, что где-то есть и по 600-800 - не нашёл.
Не пойму о чём спор. Вот сейчас кручу ручку валкодера сделанного более 10 лет назад. Механика самая обычная. Две втулки от галетного переключателя под вал 6 мм и зубчатая шестерня от старого будильника в качестве диска. Оптопары АОТ137. За эти годы только пару раз смазывал машинным маслом. А если использовать вместо втулок подшипники, то можно и лет сто крутить. Диски можно сделать в программе FrontDesigner минуты за три. Или меньше при опыте работы с этой программой. Образец прилагаю.
PS: шаговики использую только как механику для оптического диска. Просто не терплю "шагов" при вращении от полюсов ротора и статора.
Вот и я о том же.. тоже давно уже, наверное не меньше 10 лет назад сделал несколько таких самодельных из мышек, механику использовал и от КИНАПовской какой-то прибамбасины.. там в литой силуминовой обойме 4 подшипника, и вал 6мм.. классная штука, люфта никакого.. на вал закрепил колёсико от мышки, на обойму оптопару, и все дела.. потом сам точил такие обоймы для подшипников, короче несложно всё это, и работает отлично. Только нужно помнить, что при засвечивании внешним светом оптопары могут не работать. 73!
Вот и я о том же.. тоже давно уже, наверное не меньше 10 лет назад сделал несколько таких самодельных из мышек, механику использовал и от КИНАПовской какой-то прибамбасины.. там в литой силуминовой обойме 4 подшипника, и вал 6мм.. классная штука, люфта никакого.. на вал закрепил колёсико от мышки, на обойму оптопару, и все дела.. потом сам точил такие обоймы для подшипников, короче несложно всё это, и работает отлично. Только нужно помнить, что при засвечивании внешним светом оптопары могут не работать. 73!
Ну а реплики на форуме о " Более-менее приличный оптический энкодер (для SW-2010), стоит 1000-1200 руб. " чем же он приличный (Всего 64 импульса, 2080,00 руб. ) и он ли стоит в этом трансивере. В документации от Radio Design на SW-2010RD есть мануал на него. Информацию выкладываю.
Назовите мне какой папаша отвалит такую сумму своему сыну, решившему занятся нашим делом, при зарплате 15-20 тыс. руб.- а на селе и того ниже.
Я предлагаю вариант на 125 и 200- это предел для оптопары от мышки, больше можно получить применив оптопару от старых лазерных принтеров. Но диск печатать прийдется, в принтере лента с рисками. С этой оптопарой можно получить и 1000 импульсов, но нужны ли они. Все зависит от применяемого синтезатора.
Да и мышку от "компа" найти проще, чем списаный принтер.
Или вот это "использовать механику от шагового двигателя и оптопару от мышки, дана ссылка на программу которой можно распечать качественый диск PS: шаговики использую только как механику для оптического диска. Просто не терплю "шагов" при вращении от полюсов ротора и статора. "
Информацию надо читать а не обсуждать с наскоку, предлагалось тоже самое. Только я подробно расписал, что бы не наступали на "грабли" и не кляли меня относя свой принтер в сервис. И дал ссылку на программу для более качественой печати, смотрите мой пост. Чего не сделал UR3ILF- чем посмотреть ваш проект? Дайте ссылку.
Я например знаю где это обсуждалось( а кто читает сейчас форум нет) и видел ваши примеры, риски формируемые вашей программой сливаются к центру круга, а сделаные в Компасе нет. Но и ваши диски можно можно применить, оптопарой используются область 5-6 мм от края диска.
Энкодер (от англ. encode – преобразовывать) – это устройство для преобразования угловых положений или линейных перемещений в цифровой сигнал, т.е. энкодер – это датчик угла или линейного перемещения, соответственно есть крутильные и линейные энкодеры. Принцип работы энкодера заключается в преобразовании механического перемещения в электрические сигналы, у обычного инкрементального энкодера, который мы будем рассматривать, этот сигнал представляет собой два квадратных сигнала (при равномерном вращении), сдвинутых по фазе на 90 градусов.

Самым хорошим модулем с энкодером на Aliexpress является вот такой, на круглой плате:

ПОДКЛЮЧЕНИЕ
У модулей энкодера тактовые выводы подтянуты к питанию и дают низкий сигнал при срабатывании, также на них стоят RC цепи для гашения дребезга. Вывод кнопки никуда не подтянут! Промышленный энкодер подключается точно так же, чёрный и красный провода у него питание, остальные – тактовые выходы.
У модулей энкодеров тактовые выходы и кнопка подтянуты к питанию, у круглого модуля также стоят RC цепи для аппаратного подавления дребезга контактов, у KY-40 (прямоугольный) распаяна только подтяжка. Если нужно подключить “голый” энкодер к плате – в целом можно подключить напрямую без обвязки, как на схеме ниже, моя библиотека отработает и подтяжку средствами микроконтроллера (INPUT_PULLUP), и программный антидребезг. Но рекомендуется всё-таки делать RC цепи для кнопки и для тактовых выходов энкодера.
есть идея сделать абсолютный энкодер, как можно меньшего размера: 1-сфотографировать плавный переход чёрной полосы в белую, плёнкой. 2-проявить плёнку и закрепить, промыть 3- вырезать с кадра полосу необходимого размера 4-скрутить полосу в барабан и закрепить его на диске с валом 5- разместить в корпус, установить фотодиод и светодиод.
тут нужно найти фотодиод наименьшего размера, как можно меньшего, желательно с десятые доли миллиметра. можно ещё меньший, для большей точности, но чтобы поддавался установке паяльником. светодиод, думаю, в столь тщательном подборе не нуждается. предпологаю, что это простейший способ изготовить самому абсолютный энкодер, с как можно меньшими размерами и весом.
абсолютный энкодер. ШИМ
Добрый день. Подключаю абсолютный энкодер к МК. Динные считываю через PWM input. Таимер подключен к.

Форма максимального размера без возможности уменьшения размера
Мне необходимо сделать так, чтобы при запуске форма программы была развернута на весь размер.
. меньше, чем вот такие покупные (от 200 до 700 рублей)?
EAW0J-B24-AE0128L, энкодер абсолютный
HOA0902-011 ИК энкодер направления + скорости
И уточните, энкодер чего: угла-положения, направления и скорости?
а 200 рублей? Что насчет обычных валкодеров из диска с отверстиями (от той же мышки) и двух пар светодиод-фотодиод? Проще некуда, как и дешевле.
А вообще, назовите условия эксплуатации и кол-во рабочих циклов энкодера в сутки, может вам обычный переменный резистор подойдет.
а 200 рублей? Что насчет обычных валкодеров из диска с отверстиями (от той же мышки) и двух пар светодиод-фотодиод? Проще некуда, как и дешевле.
А вообще, назовите условия эксплуатации и кол-во рабочих циклов энкодера в сутки, может вам обычный переменный резистор подойдет.
тогда оговорите, что у вас есть уже в наличии?
почти в десятку:робот роботам-рознь.нормальный облегчённый робот, с одним двигателем на все исполнительные механизмы, работающие в асинхронном режиме, механика. вы отнимаете у меня время вопросами.
тогда делайте энкодер из того, что у вас имеется в наличии: берете неназванное, соединяете с неназванным и вкручиваете в неназванное. Самый простой способ.
почти в десятку:робот роботам-рознь.нормальный облегчённый робот, с одним двигателем на все исполнительные механизмы, работающие в асинхронном режиме, механика.
вопрос был не про робота, а про условия экплуатации предполагаемых энкодеров. Энкодеры будут установлены на каждый исполнительный механизм? Количество рабочих циклов каково, 1-2/100/1000/1000000? Возможно открытое исполнение энкодера или должно быть IP-защищенное?
Hretgir, простите, но Вы не находите, что без понимания того чего вы желаете добиться, сложно что то советовать?
ничего не могу ответить, нет расчётов. в лучшем случае условия экплуатации ограничатся возможностями управления и нуждами. последними не на первой модели-это точно.
вода, вода, одна вода.
простите, но Вы не находите, что без понимания того чего вы желаете добиться, сложно что то советовать?
извините, я не добиваюсь ничего, я делаю, не для того, чтобы потом от кого-то чего-то требовать
извините, смею заметить, что разница в том, что вы отнимаете у меня моё личное время. я думаю, что не могу дать raxp большей информации, чем дал, чтобы её иметь мне ещё нужно работать
ну так работайте. Тема закрыта по причине отсутствия технической информации.
мои действия можете обжаловать у Mik-a-el
ничего не могу ответить, нет расчётов. в лучшем случае условия экплуатации ограничатся возможностями управления и нуждами. последними не на первой модели-это точно.
Если нет даже прикидок по количеству рабочих циклов и рабочей среде, тогда целесообразнее ориентироваться изначально на конструкцию бесконтактных оптических энкодеров или магнитных датчиков положения на эффекте Холла. Поскольку вы не предполагаете дополнительных затрат, даже в виде одного рубля, то можно сымитировать магнитный датчик несколькими катушками (геркон был бы простым решением, но увы по механике ненадежен в условиях тряски, да и кол-во срабатываний ограниченно) и расположением на валу постоянных магнитов. Наковырять их вы можете из того, что не назвали. Направление момента магнитной индукции можно отследить простой схемой.
Окно без возможности изменения размера
Подскажите пожалуйста, необходимо сделать, что бы при открытии форма была максимально развернута.
как открыть картинку (и по возможности большого размера 10000х12000)
Всем привет! уже перепробовал множество вариантов : пробовал в имадж_вью но остановился на.

Рано или поздно в жизни каждого самоделкина возникает потребность в покупке чего-то такого этакого, что обычно само в голову не придет. Вот и я жил себе спокойно и об энкодерах даже не задумывался.
Хотя должен признаться опыт работы с энкодерами имел. Как-то в одной и поделок использовал энкодер из принтера.
В данной истории все приключилось внезапно. Ползая по своим хоббийным форумам натолкнулся на конкурс. Сайт (называть не буду, т.к. разговор не о нем) проводил видимо раскрутку посещаемости и плюс один из форумчан проводил раскрутку своих российского производства изделий. И разыгрывался комплект из 3 наборов для самостоятельной сборки сервоконтроллеров. Я зарегистрировался на этом форуме, подал заявку (вместе с 3 или 4-мя всего лишь участниками) и… выиграл.
Так я стал обладателем 3-х наборов для сборки сервоконтроллеров. Далее мне потребовались энкодеры. Позволю себе объяснить для читателей не так глубоко погруженных в электронные компоненты, что такое сервоконтроллер, энкодер и с чем все это едят.
Есть 2 основных способа управлять точным перемещением в изделиях с ЧПУ (числовое программное управление). Попробую объяснить максимально доступным языком, без сложных схем и терминов.
Первый способ это шаговые двигатели. Шаговый двигатель имеет сложное устройство — несколько катушек, притягивающих сердечник в заданных положениях.

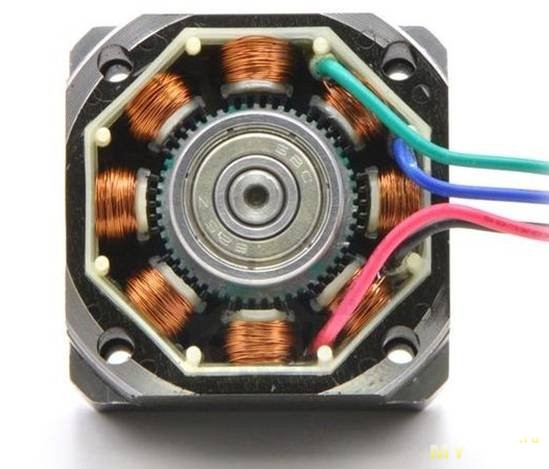
Количество положений, в которых может быть зафиксирован сердечник называется шагами, промежуточные положения (регулируются различными промежуточными напряжениями и соответственно магнитными полями) называют микрошагами. Управляет шаговым двигателем драйвер — это плата управления, как правило с микропереключателями шагов и регулировкой тока, протекающего через двигатель. На вход драйвера подаются сигналы: Enable (разрешить работу шагового двигателя), DIR (направление вращения), STEP (количество шагов, на которое двигателю необходимо повернуть вал). И драйвер переводит команды в обороты вала двигателя. Очень простая и надежная конструкция. Из минусов — скорость вращения двигателя ограничена из-за его конструктива, и если двигатель пропустит по той или иной причине шаги, то управляющая программа об этом не узнает. Отсюда и область применения — низко и среднескоростные двигатели в заданной области нагрузок. Например 3Д принтер или хоббийные станки.
Второй способ управлять перемещениями — сервомотор. Мотор сам по себе может быть любым, постоянного или переменного тока, без разницы. Единственное условие, его вал должен иметь энкодер. Энкодер — это устройство определения позиции вала в данный момент времени. Об энкодерах мы поговорим подробнее чуть позже. Сервоконтроллер имеет другой принцип работы, в отличии от драйвера шагового двигателя. Сервоконтроллер получает на входе те же самые сигналы Enable, STEP, DIR и подает на двигатель напряжение. Двигатель начинает вращаться в нужном направлении, энкодер возвращает данные о положении вала двигателя. Как нужное положение достигается, вал двигателя в нем фиксируется. Конечно это сильно упрощено, т.к. есть ускорение и торможение двигателя, управление током и напряжением, пропорционально-интегрально-дифференцирующий (ПИД) регулятор в контуре обратной связи,… но мы же договорились в этот раз не сильно лезть в теорию.

Какие же плюсы серводвигателей: любая скорость вращения, отсутствие пропуска шагов, бесшумность (шаговый двигатель ощутимо громок в работе из-за своего конструктива). Но цена сервоконтроллеров выше и существенно драйверов шаговых двигателей. Поэтому основная ниша сервоконтроллеров — профессиональное применение.
Для своего проекта я выбрал двигатели Динамо Сливен. Эти двигатели широко использовались в советское время в ЭВМ и их было какое-то нереально большое количество. Кажется, что практически любой хоббийщик или имеет такой двигатель или сталкивался с ним. На барахолках их до сих пор перепродают. Это двигатели постоянного тока с фантастическим неубиваемым ресурсом и устойчивостью к любым издевательствам.


Теперь уже практически переходим сути обзора — к энкодерам. Выбор энкодера был осуществлен по характеристикам и цене. Какие бывают типы энкодеров. В основном это оптические и магнитные. Магнитные — когда на краях диска закреплены магниты, а возле них находится датчик Холла.
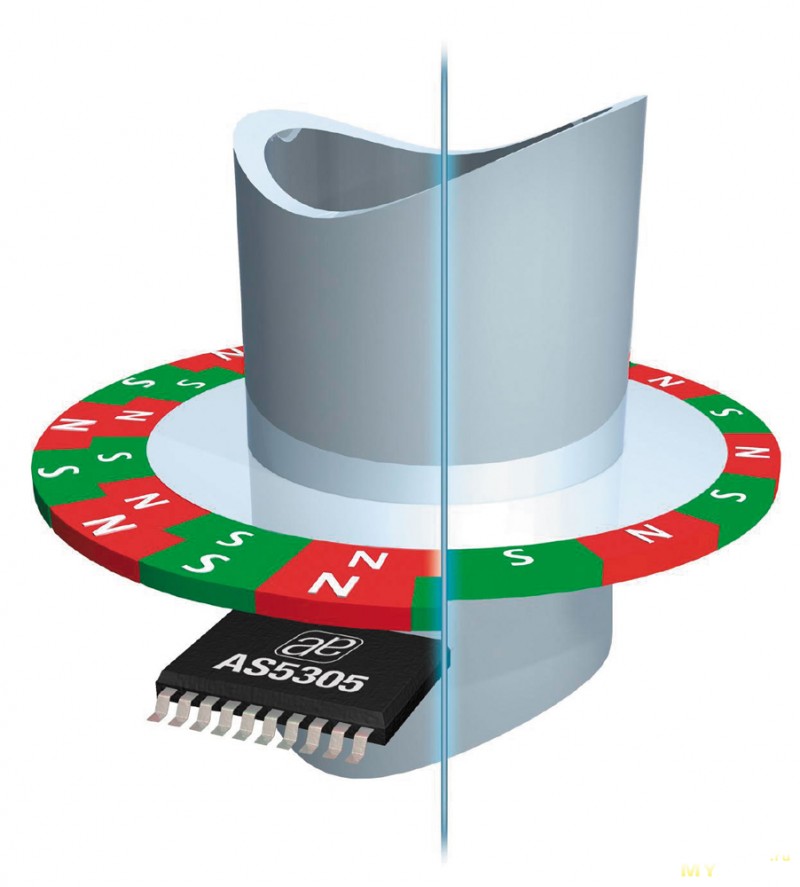
Решение дорогое, промышленное, обладает повышенной надежностью. Цена не хоббийная ни разу.
Оптические энкодеры. Самое распространенное решение. Есть в каждой мышке. Раньше отвечали за вращение шарика и колесика. Теперь шариков уже нет, а вот колесики остались. Принцип работы прост — прерывание светового пучка проходящим непрозрачным телом.
Оптические энкодеры есть 2-х типов: инкрементальные и абсолютные. Инкрементальные делятся на 2 подтипа. Простейшие инкрементальные — такие как изображены на рисунке выше. Они определяют пересечение светового потока и на их основе можно построить, например, тахометр. Недостаток данного энкодера состоит в том, что при помощи него невозможно определить направление вращения диска. Инкрементальные 2-х канальные решают задачу определения направления вращения диска.

Для этого используется не один фотодиод, а несколько, обычно 4. Они формируют 2 независимых канала передачи данных, и сравнивая сигналы с этих каналов можно однозначно сделать вывод о направлении вращения диска.
Какие же недостатки есть у данного инкрементального энкодера? Недостаток один, но для ряда применений он критичный. При инициализации энкодера мы не знаем в каком положении находится диск. Т.е. мы можем узнать только направление и скорость вращения диска.
Для получения полной информации, а именно — начальное положение диска, направление и скорость вращения используются абсолютные энкодеры.

Абсолютные энкодеры используют диск со сложной системой кодировки положения. Наиболее распространен код Грея — двоичная кодировка с защитой от ошибок.
Я остановил свой выбор на инкрементальном энкодере с контролем направления вращения, т.е. с двумя квадратурными каналами вывода информации. Разрешения в 100 линий на оборот диска мне было за глаза. Поэтому на Алиэкспрессе я нашел энкодеры за разумную цену и с нужными мне характеристиками.
Вот фотка 3-х пришедших мне энкодеров. Дошли они недели за 3.

У энкодеров 4 вывода, Красный — питание 5В, Черный — земля, Цветные — каналы А и В.
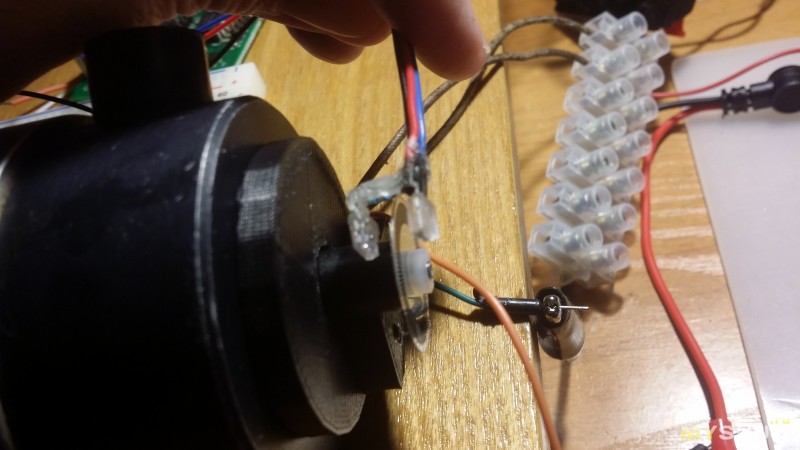
Я быстренько выточил втулочку на вал двигателя под крепление диска, ввинтил туда стержень с резьбой.

На 3Д принтере распечатал площадку под крепление датчика энкодера

Собрал все вместе
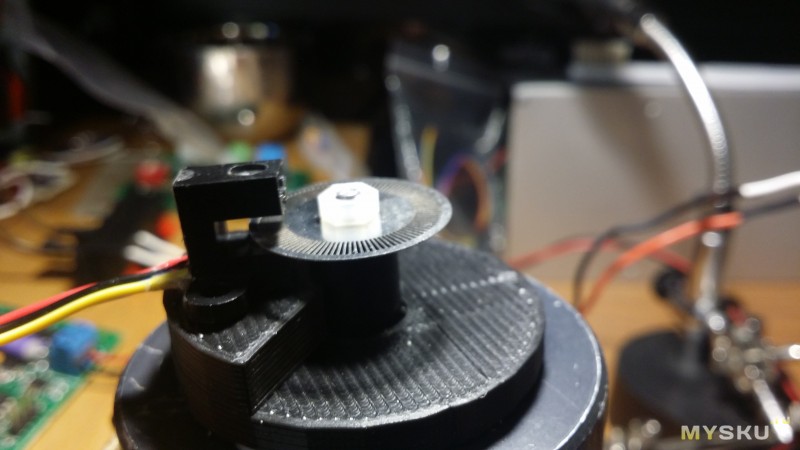
Подключил сервоконтроллер, и… тут бы был счастливый конец обзору, но нет. Ничего не заработало. Даже близко ничего не заработало.
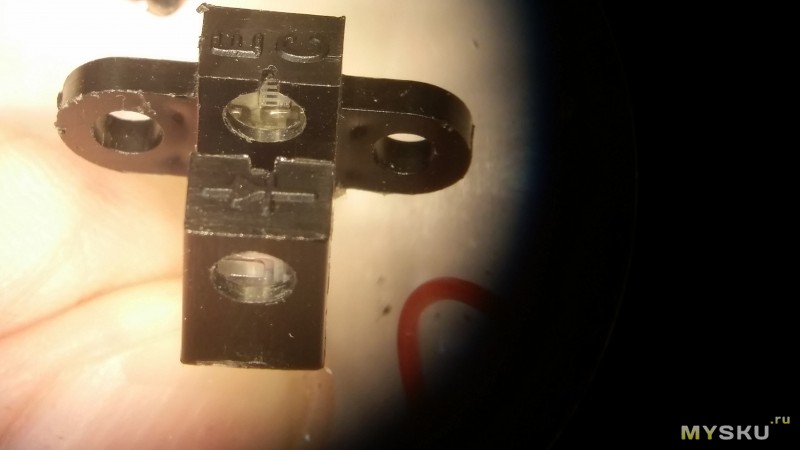
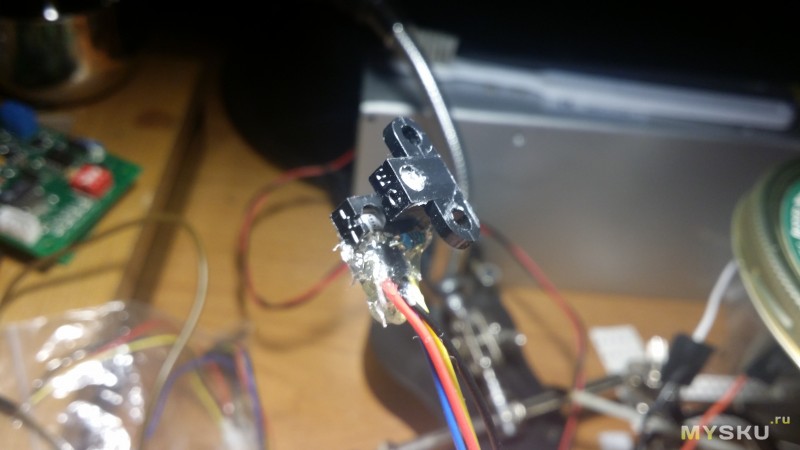
То что я увидел повергло меня в изумление. Все 4 сенсора стояли в ряд по радиусу диска, т.е. засвечивались через прорезь диска одновременно. Разумеется ничего не работало. Датчики должны стоять перпендикулярно радиусу диска, и засвечиваться последовательно разными фронтами прорези диска. Я не мог поверить, что это так просто и так глупо. Китайцы поставили датчик с поворотом на 90 градусов. Я спросил на форуме у такого же как я покупателя таких же энкодеров как у него стоит датчик. И у него все было также неправильно и не работало.
Поднес датчик к диску так чтобы сенсоры был поперек рисок. Конечно датчик корректно не встал, но на осциллографе начал появляться какой-то осмысленный сигнал.
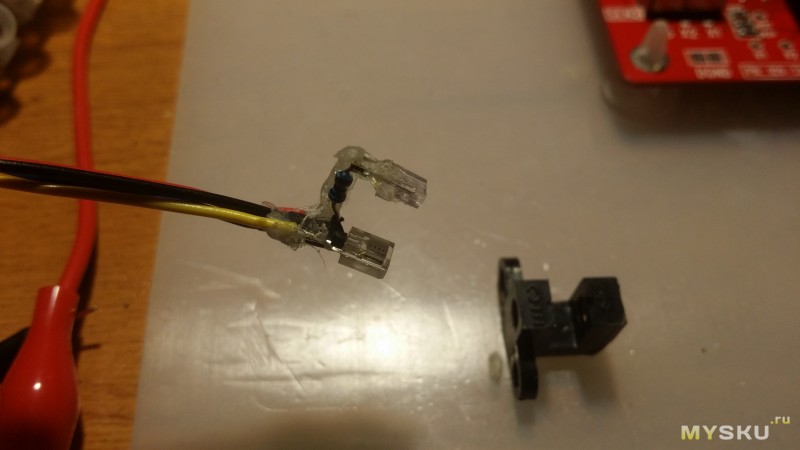
Дальше разрезал корпус энкодера сбоку, наростил проводочками расстояние между светодиодом и матрицей сенсоров и засунул все в корпус по-новому.
На фото видно, что сенсоры стали перпендикулярно радиусу диска.
Собрал, подключил к сервоконтроллеру и… Бинго, все заработало! Мотор встал в режим удержания позиции. Т.е. при попытке проворота вала двигателя, мотор упирается и если его все же провернуть, то возвращается в исходное положение.
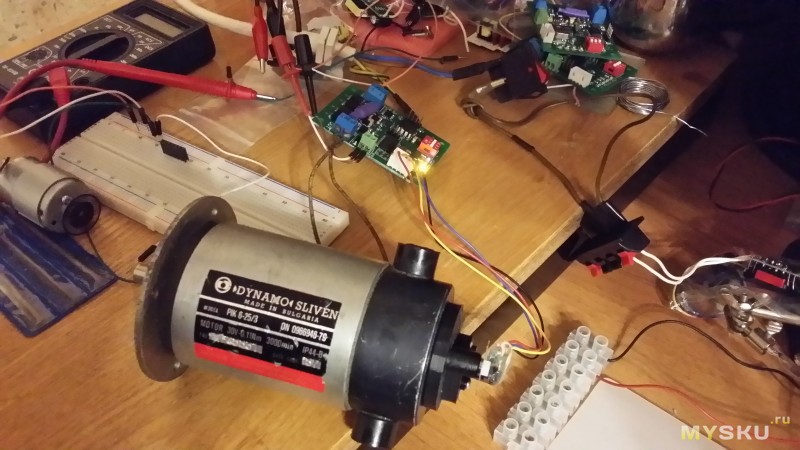
Ну а дальше двигатель займет свое место на фрезерном станке, но это уже совсем другая история. -)
Как резюме. Энкодер из коробки не работает. К покупке не рекомендую. Но в своей ценовой категории, если он был бы исправным, это хорошее бюджетное решение. Либо если переделка изделия в работающее не пугает, то можно брать и переделывать.
У продавца куча положительных отзывов на такой энкодер. Либо это все липа, либо, что вероятнее, брак пошел массово совсем недавно.
Я написал продавцу, он пока шлет мне тонну технических описаний и предлагает попробовать еще, и намекает, что это я не разобрался. Буду на него давить. Пусть хоть часть денег вернет. Я столько времени угрохал из-за их заводского разгильдяйства.
Читайте также: