
Электромотоцикл своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
Электромотоцикл для внучки своими руками
Подарок на день рождения (два года).
Первоначально была идея установить электродвигатель на готовую детскую машинку или мотоцикл, даже нашел донора, но потом решил все делать самостоятельно.В закромах имелись двигатели на 24В с редуктором.
Для постройки мотоцикла очень удачно пригодились детали и материалы которые неизвестно для чего собирались и хранились в течении нескольких лет.
Рама мотоцикла изготовлена из алюминиевого профиля. Руль выгнут из алюминиевого прутка, из него же изготовлены перья вилки. Ручки руля выточены из карболита. Вилка вращается на подшипниках от велосипедной педали. Колеса от китайских тележек приобрел на рынке. Все колеса вращаются на подшипниках, ход очень легкий. Двигатель с редуктором закреплен на шарнире. Для передачи вращения используется плоский ремень от электроинструмента, а для его натяжения служит пружина. Имеется возможность опустить и зафиксировать двигатель для разъединения передачи. При испытаниях несколько раз менял диаметры приводных шкивов, добиваясь оптимальной скорости движения.
Так как наша внучка живет в другом городе, то для расчета эргономики мотоцикла я попросил дочь измерить ее. Из пластика был изготовлен макет. Дочка долго смеялась, когда увидела фото макета и узнала для чего мне это было нужно.
Впервые увидев мотоцикл, внучка отнеслась к нему настороженно. Несколько дней просила покатать на мотоцикле зайца, потом освоилась и стала кататься сама.
К следующему приезду внучки хочу поменять колеса на более легкие (вес одного колеса от тележки 600 г). Нашел подходящие от детской коляски. Также заменить аккумулятор на литиевый, более легкий и с большим напряжением, ребенок растет и можно увеличить скорость. Возможно в педаль установлю регулятор оборотов от шуруповерта.
Хочу поблагодарить своего друга Николая Николаевича за предоставленный доступ к токарному станку и извиниться за то, что стырил несколько болтиков из коробочек в его мастерской :-)).

Тяжело ли самостоятельно сделать электро скутер
Передвижение посредством двухколесного транспорта с электрическим мотором становится все более популярным не только благодаря экологической составляющей и экономии, а по большей части из-за возможности собрать такой транспорт самостоятельно у себя в гараже.
Итак, перед тем ка приступить к сборке такого агрегата, стоит отметить, что это целесообразно только в том случае, если действительно есть возможность каким-то образом усовершенствовать стоковую конструкцию или настройки. В остальных случаях, лучше всего приобрести уже готовый агрегат.
Пошаговое решение
- Необходимо определить для себя мощность и в дальнейшем отталкиваться от этого.
- Большое внимание необходимо уделить и аккумулятору Он должен иметь удовлетворительную емкость и напряжение.
- Присмотреть требуется и подходящий контроллер.
- Сначала необходимо закрепить на раме контроллер, АКБ и двигатель, после чего соединить их между собой.
- Теперь требуется зарядить аккумулятор от электрической сети и провести пробный пуск системы.
Что необходимо для сборки электрического скутера?
В том случае, если вы все-таки решились на то, чтобы собрать электроскутер своими руками, самое важное – подбор двигателя и аккумулятора, так как это средство передвижения работает на электрической тяге.
Выбор того или иного двигателя с аккумулятором, напрямую влияют на максимальную скорость и пробег:
- Если брать свинцовые аккумуляторы, то можно достаточно сэкономить, однако они имеют большой вес и это необходимо учитывать.
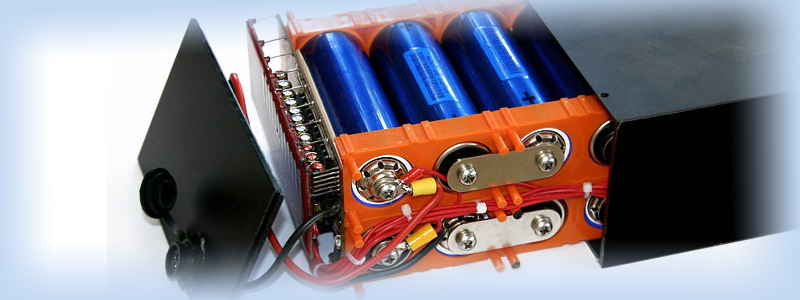
- Более дорогая альтернатива – литий-фосфатные аккумуляторы, которые имеют меньший вес.
- Лучше всего ставить аккумуляторную батарею под рамой, где кроме нее будет располагаться контроллер и сигнализация. Под сидением необходимо оставить хоть немного места для багажа.
- Необходимо понимать, что сборка электрического скутера своими руками, в обязательном порядке подразумевает сварочные работы. В случае если в наличии не имеется необходимого оборудования, инструментов и навыков, тогда такая затея может обойтись куда дороже готовой электрической модели.
- Но в любом случае, в долгосрочной перспективе это окупится за счет электрического двигателя, который намного дешевле заправлять.
Набор готовых компонентов
Очень важно правильно установить электрический двигатель. Это одно из самых важных моментов во время сборки скутера. Очень важно минимизировать звук, который он будет издавать (это же не рев от Ford Mustang). Это можно сделать за счет отсутствия коллектора и щеток. Зачастую его ставят на заднее колесо, вращение которого происходит благодаря электросхеме, которая подает толчок на переднее.
Подыскивать необходимые компоненты для своего электрического скутера необходимо максимально ответственно. Можно купить электромотор и аккумулятор вместе с необходимыми связующими отдельно, а можно пойти по пути наименьшего сопротивления и купить уже готовый комплект. Несмотря на то, что такой будет стоить дороже, можно сразу купить набор с контроллером и мотор-колесом, зарядным устройством и набором гидравлических тормозов.

Преимущества и недостатки
Уже много лет, некоторые европейские страны активно борются за экологию, поэтому у них запрещены бензиновые скутеры. Электрические аналоги безусловно обладают некоторыми преимуществами в этом случае:
- Намного современней дизайн.
- КПД намного выше.
- Нет необходимости в частом ремонте силового агрегата.
- Легко найти запчасти.
- Практически отсутствует шум при езде.
- Проще зарядиться.
Но не лишены они и недостатков в виде дальности езды на одном заряде. Однако для поездок по городу – это оптимальный вариант.
Безопасна ли будет такая самоделка?
С точки зрения рисков для жизни – абсолютно безопасной, с точки зрения кошелька – далеко не все так просто, ведь если не разбираться в элементарной электрике на уровне плюс к плюсу, а минус к минусу, то можно спалить не только платы контроллера, но и сам электродвигатель.

Самое лучшее, что может произойти при неправильно сборке – самодельный электроскутер просто не тронется с места. Если не терпится сделать такой транспорт своими руками, лучше заручиться помощью толковых друзей, которые смогут переварить раму и правильно подключить систему.


Максим Zvonitsky – автор канала Stuntexru, рассказал о взрослом электромотоцикле. Это конверсия бензинового мотоцикла Yamaha YZ250, сделанная своими руками. Высокая скорость является невыгодной для электротранспорта. Поэтому выбрано внедорожное шасси с ожиданием, что средняя скорость будет составлять 40-60 км / ч. В этом режиме батарея работает хорошо, энергия расходуется не быстро. Двигатель от макси скутера весом 230 кг, то есть с резервом мощности. Емкость аккумулятора составляет 3,2 кВт / ч, 144V напряжения хватит на 100 километров, если экономить, и 50 км в режиме гонки.
Одна ступень передаточная и сразу выход через вал через цепь на заднее колесо. Это значительно упростило систему в сравнении с двигателем внутреннего сгорания. Преимущество заключается в том, что система не обслуживается. Нужно только для зарядки и ездить. Батарея имеет ресурс и здесь он составляет около 2000 циклов до потери до 20% емкости батареи.
Электротранспорт продается в этом в этом китайском магазине.
Как сделать электроскутер своими руками: важные рекомендации
Важный момент в процессе создании электрического скутера самостоятельно – выбор электродвигателя и аккумулятора. От правильной комплектации зависят возможности вашего детища, его скорость и пробег. Что касается аккумуляторной батареи, то тут придется выбирать между экономичностью свинцовых аккумуляторов и более дорогими литиевыми или литий-фосфатными. Из-за большого веса первых они непрактичны, а второй тип гораздо легче и долговечнее. Выбор будет связан и с тем, как вы планируете эксплуатировать свой новый скутер = только в теплый сезон или же ездить на нем и зимой.

Установка электродвигателя – ответственный момент в процессе сборки своими руками электроскутера. Добиться его беззвучной работы можно за счет отсутствия щеток и коллектора. Чаще его монтируют в заднее колесо, которое вращается благодаря электросхеме, посылающей импульсы на ведущее переднее колесо.
Компоненты для электроскутера можно искать самостоятельно, и многим умельцам этот процесс доставляет, может быть, большее удовольствие, чем его сборка. Некоторые посвящают этому недели и месяцы, разыскивая подходящую батарею или электромотор. Другое решение, более простое, но гораздо дорогостоящее – купить набор для электроскутера. Например, можно приобрести набор с мотор-колесом, контроллером (лучше с функцией рекуперации), комплектом гидравлических тормозов и зарядным устройством.











Какие особенности имеет электромотоцикл?
Главной особенностью электромотоцикла является то, что нет коробки передач и сцепления. Этот мотоцикл имеет такие же характеристики, как кроссовый мотоцикл с двигателем 250 кубических сантиметров.

Как вы уже знаете из прошлых постов, у нас в компании есть DIY-движение. В свободное от работы время коллеги занимаются фрезеровкой печатных плат в домашних условиях, делают тепловизор на FLIR Lepton, а также решают семейные разногласия с помощью 4 контроллеров и 2 умных часов. Продолжим серию увлекательный историй! Сегодня я расскажу, как сделать контроллер к трехфазному двигателю электровелосипеда своими руками. Целью создания такого контроллера было:
- Изучение работы трехфазного мотора под управлением контроллера.
- Большинство контроллеров для электровелосипедов, представленных на рынке, — китайские. Они хоть и относительно дешевые (около 2.000 руб в зависимости от мощности), но являются неведомой коробкой, в которой неизвестно что происходит. И сразу к ней возникает очень много вопросов — экономично ли она потребляет и распределяет ток, какой у нее запас мощности, почему так сильно перегревается, преждевременно срабатывает защита по току и т.д.
В тоже время на рынке представлены европейские качественные контроллеры для электробайков. Они оснащаются расширенными функциями, работают на разных напряжениях и токах и их можно программировать. Устанавливаются они на сверхмощные электровелосипеды. Но цена у них кусается — 10-20 тыс. рублей.
В итоге я решил пойти своим путем: разобраться в устройстве контроллера, сделать его прототип, а затем попытаться сделать контроллер качественнее китайского контроллера. На текущий момент проект у меня в разработке только и на уровне прототипа, готового варианта пока нет. Буду рад услышать ваши комментарии и советы.
Применение
В электровелосипедах используются трёхфазные бесщёточные электродвигатели с датчиками Холла. Стоит отметить, что применение подобных трёхфазных двигателей достаточно обширно:
- Бытовая техника
- Оргтехника
- Электротранспорт
- Промышленность
Устройство двигателя
Для разработки контроллера необходимо разобраться с принципом работы самого электродвигателя.

Электродвигатель состоит из фазных обмоток, магнитов и датчиков Холла, отслеживающих положение вала двигателя.
Конструктивно электродвигатели делятся на два типа: инраннеры и аутраннеры.

У инраннеров магнитные пластины крепятся на вал, а обмотки располагаются на барабане (статоре), в этом случае в движение приводится вал. В случае аутраннера всё наоборот: на валу — фазные обмотки, а в барабане — магнитные пластины. Это приводит в движение барабан.
Так как у велосипеда колесо крепится валом на раму, то здесь применителен тип аутраннера.

На этой картинке условно представлены три фазы с обмотками, соединёнными между собой. В реальности обмоток намного больше, они располагаются равномерно с чередованием по фазам по окружности двигателя. Чем больше обмоток — тем плавнее, чётче, эластичнее работает двигатель.
В двигатель устанавливаются три датчика Холла. Датчики реагируют на магнитное поле, тем самым определяя положение ротора относительно статора двигателя. Устанавливаются с интервалами в 60 или 120 электрических градусов. Эти градусы относятся к электрическому фазному обороту двигателя. Необходимо учитывать, что чем больше в двигателе обмоток на каждую фазу, тем больше происходит электрических оборотов за один физический оборот мотор-колеса.

Обмотки трёх фаз в большинстве случаев соединяются между собой по двум схемам: звезда и треугольник. В первом случае ток проходит от одной из фаз к другой, во втором — по всем трём фазам в разной степени. Иногда эти две схемы подключения комбинируют в одном двигателе, например в электромобилях. При старте и наборе скорости идёт соединение фаз по звезде: она даёт больший момент при относительно низких оборотах; далее, после набора скорости, происходит переключение на треугольник, в результате количество оборотов увеличивается, когда уже не нужен большой крутящий момент. По сути, получается условно автоматическая коробка передач электродвигателя.
Цикл работы
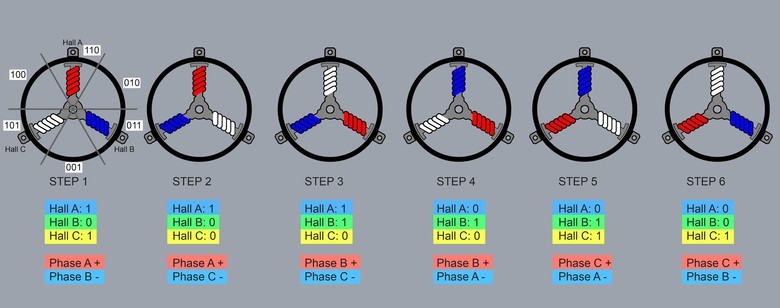
Рассмотрим эти шесть шагов цикла. Предположим, что положение ротора установлено в точке первого шага, тогда с датчиков Холла мы получим код вида 101, где 1 — фаза А, 0 — фаза B, 1 — фаза С. Определив по коду положение вала, нужно подать ток на соответствующие фазы с заданными полярностями. В результате вал проворачивается, датчики считывают код нового положения вала — и т. д.
В таблице указаны коды датчиков и смена комбинаций фаз для большинства электродвигателей. Для обратного хода колеса (реверса) достаточно перевернуть знаки полярности фаз наоборот. Принцип работы двигателя довольно прост.
Цикл двигателя представлен в gif-анимации.
Транзисторы и Н-мост
Но чтобы поочерёдно подавать ток на каждую из фаз и менять их полярность, необходимы транзисторы. Ещё нам нужна передача больших токов, высокая скорость переключения и чёткость открытия/закрытия затворов. В данном случае удобнее управлять затворами по напряжению, а не по току. Поэтому оптимальны полевые (MOSFET) транзисторы. Чаще всего их используют в контроллерах. Очень редко можно встретить комбинированный вариант транзисторов.

Для переключения фаз со сменой их полярностей используют классическую схему Н-моста (H-Bridge) из полевых транзисторов.

Он состоит из трёх пар транзисторов. Каждая из пар подключается к соответствующей фазе обмотки двигателя и обеспечивает подачу тока со значением (+ или –). Транзисторы, отвечающие за включение фазы с положительным значением, называют верхними ключами. С отрицательным — нижними. Для каждого шага открывается пара ключей: верхний одной фазы и нижний соседней фазы. В результате ток проходит от одной фазы к другой и приводит электродвигатель в движение.
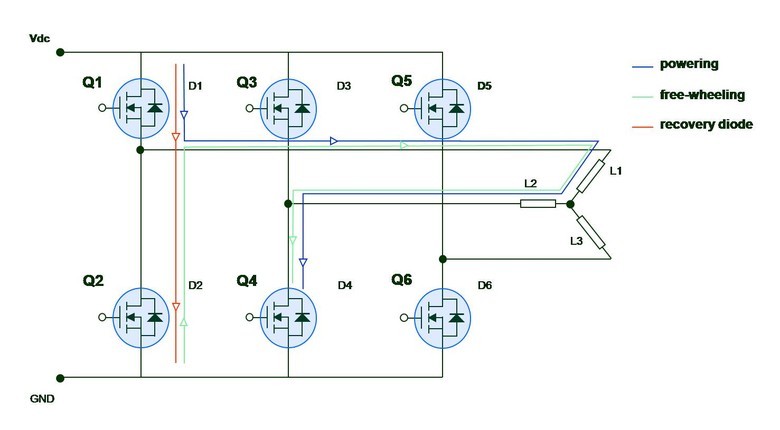
Из схемы видно, что мы не можем включить одновременно верхний и нижний ключ у одной и той же фазы: произойдёт короткое замыкание. Поэтому очень важно быстрое переключение верхних и нижних ключей, чтобы в переходных процессах не появилось замыкание. И чем качественнее и быстрее мы обеспечим переключения, тем меньше у нас будет потерь и нагрева/перегрева транзисторов H-моста.
Для запуска остаётся обеспечить управление затворами ключей H-моста. Для управления H-мостом нужно:
- Считать показания датчиков Холла.
- Определить, в каком положении какую пару ключей включать.
- Передать сигналы на соответствующие затворы транзисторов.
Прототип на Ардуино
Под рукой у меня была Arduino UNO, и я решил собрать контроллер на её основе.
Первым делом я подал на датчики Холла питание 5 вольт от Ардуино (его достаточно для датчиков). Сигнальные провода от датчиков подключил на цифровые пины Ардуино, написав простейшую программу для считывания и обработки сигналов с датчиков.
Затем собрал Н-мост из полевых NPN-транзисторов. Подвёл к мосту независимое питание на 12 вольт. Но при отладке, чтоб убедиться в работоспособности, я подключил напрямую шесть пинов 5V из Ардуино на затворы H-моста. У большинства полевых транзисторов затвор работает на 20 вольт. Так делать нельзя, потому что Н-мост будет плохо работать и перегреваться. Но для кратковременных тестов это пойдёт. Кое-как, с сильными перегревами и страшными звуками, вибрациями и толчками колесо медленно закрутилось. Начало положено.
Мостовые драйверы
Далее предстояла работа над напряжением 20 вольт на управление затворами. Для этого существуют мостовые драйверы транзисторов, они обеспечивают стабильные импульсы в 20 вольт на затвор и высокую скорость отклика. Сначала у меня были популярные драйверы для маломощных моторов L293D.

Для управления затворами его достаточно, к тому же их очень просто использовать. Один такой драйвер может обеспечить питанием две пары ключей. Поэтому я взял две штуки L293D. Собрал контроллер с этими драйверами, и колесо начало крутиться существенно плавнее, посторонних звуков стало меньше, нагрев транзисторов уменьшился. Но при увеличении оборотов синхронизация с контроллером пропадала, появлялся посторонний звук, колесо дёргалось, вибрировало и полностью останавливалось.
В это же время я наткнулся на два варианта мостовых драйверов:
Что касается HIP4086, то это полноценный мостовой драйвер, предназначенный для трёхфазного электродвигателя. Мне он показался несколько замороченным, и мои попытки использовать его в контроллере не увенчались успехом: он у меня так и не заработал. Углублённо разбираться в причинах не стал.
А взял я IR2101 — полумостовой драйвер, обеспечивающий работу нижнего и верхнего ключей для одной фазы. Несложно догадаться, что таких драйверов нужно три. К слову, драйвер очень прост в использовании, его подключение происходит безболезненно и легко. Получилась такая схема:


И готовый результат
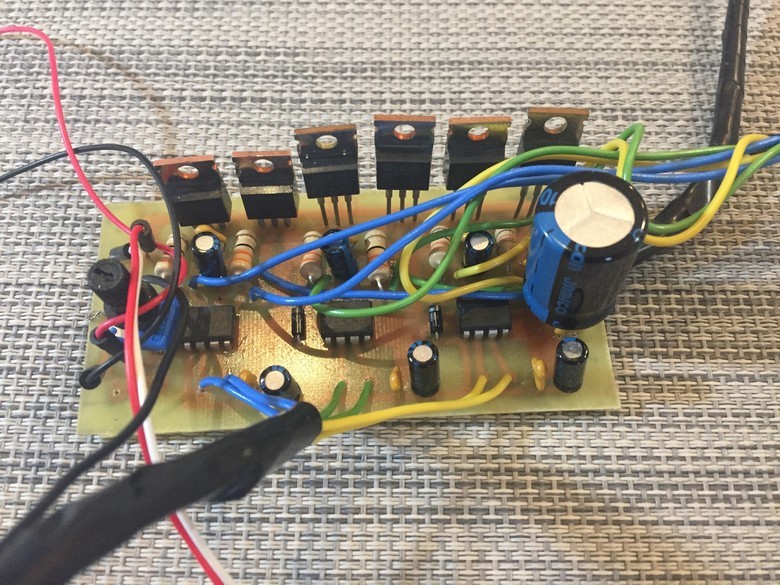
Собрал контроллер с этим драйвером и запустил двигатель. Ситуация с работой электродвигателя кардинально не поменялась, симптомы остались те же, как и в случае с драйвером L293D.
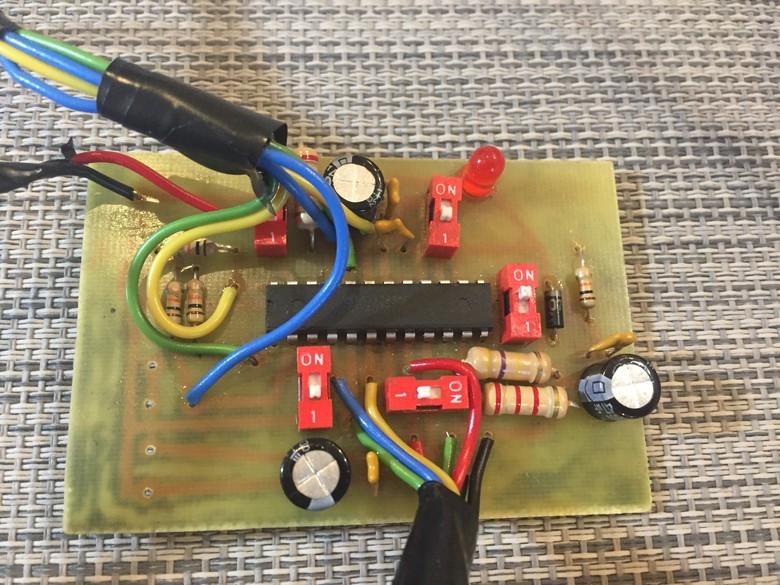
Аппаратное прерывание
И тут я понял, в чём дело: Ардуино не успевает обрабатывать показания датчиков Холла! Поэтому необходимо было использовать пины Ардуино с аппаратным прерыванием. Так как у Ардуино УНО таких пинов всего два, а под датчики нужно три пина, надо взять Ардуино Леонардо или Искра Нео, где таких пинов — четыре штуки.

Переписав программу под прерывания и подключив Искру Нео вместо УНО, я повторил испытания.
Колесо наконец-то заработало чётко, без вибраций, шумов, отлично стало набирать обороты без рассинхронизации. Прототип оказался жизнеспособным. Но это ещё не полноценный контроллер, поскольку в нём не было обвязки с защитами и обеспечением качественного ШИМ-сигнала.
Прототип на базе микросхемы MC33035
Параллельно с разработкой контроллера на Ардуино я рассматривал альтернативные варианты логической части контроллера. И это привело меня к микросхеме MC33035. Это старая разработка от Motorola, сейчас её выпускает ON Semiconductor. Создана специально для мощных трёхфазных двигателей.


- Отвечает за всю логическую часть контроллера
- Считывает показания с датчиков Холла
- Определяет положения вала
- Выдаёт сигналы для затворов Н-моста на их драйверы
- Имеет возможность подключения индикатора ошибок, перегрева
- Обрабатывает и передает ШИМ-сигнал (PWM)
- Осуществляет реверс (обратный ход колеса)
Одним словом, микросхема содержит всё необходимое для управления электродвигателем. Её стоимость очень низкая: на Алиэкспрессе — около 50 рублей. Для сборки полноценного контроллера на её основе потребуется микросхема MC33035, полумостовые драйверы и Н-мост из полевых транзисторов. Я также собрал контроллер на этой микросхеме. Работает отлично, стабильно, колесо крутится как надо на различных оборотах. Но функционал микросхемы ограничен, если необходимо наворотить различные функции, вывод на дисплей скорости, одометр, расход батареи, то опять же возникает необходимость дополнительно подключить Ардуино или что-то аналогичное.
Схема с MC33035


Главное преимущество контроллера на базе MC33035 — это простота в использовании. Просто покупаете микросхему, собираете Н-мост, спаиваете всё на плату с небольшой обвязкой — и контроллер готов. Если нужно просто запустить двигатель с ШИМ-сигналом и управлять им — оптимальный вариант.
Контроллер на базе Ардуино — вариант сложнее, понадобится писать логику, обеспечивать дополнительные защиты контроллера. Но для экспериментов, прототипов, дополнительного функционала, использования различных режимов работы двигателя — подходящий вариант. Поэтому я решил пока отложить MC33035 и продолжить работу с Ардуино.
Читайте также: