
Tda1085 регулятор оборотов коллекторного двигателя своими руками
Обновлено: 06.07.2024
Добрый день всем!
Народ подскажите по регулятору скорости на TDA 1085c
Собрал схему почти как даташите, изменил только стабилизатор питания микросхемы, сделал на кренке после первого запуска резистор очень сильно грелся и в местах работы предполагаемого аппарата уж очень не стабильное напряжение сети. Ещё не знал как устроена коробочка показанная на схеме для регулировки скорости, и поэтому взял этот узел из других схем, в нем то наверное и кроется проблема. Движок от стиральной машины, во вложении схема и фотографии.
А проблема в том что не регулируются обороты, мне нужно получить минимальные обороты барабана стиральной машины, как в режиме стирки когда бельё потихонечку переворачивается.
Движок испытывал с зажатым валом между двух деревяшек, разгон плавный, при вращении переменника регулятора скорости в крайнм положении движок останавливается. Про измерения немного сложнее, прибор элементарный стрелочный тестер, что увидел питание 9 и 10 выводы микросхемы15в, 13 вывод микросхемы 5в, 3 вывод регулируется от 3 до 6в,16 вывод 12в, 15 вывод 0,8 в. При касании тестером 11 вывода движок останавливается, при касании 12 вывода снижает обороты. 5 и 6 выводы 0 вольт.
Подскажите пожалуйста как настроить схему, какое напряжение на каких водах должно быть? Тахо генератор мне кажется рабочий, попробовал мерить другим электронным прибором, (он правда у меня глюченый какой-то китайский) он чото в районе 0,5-0,8 в показывал.
Во вложении схема, фото движка , отдельно табличка с движка и плата. С тахогенератора идут два красных провода к микросхеме.
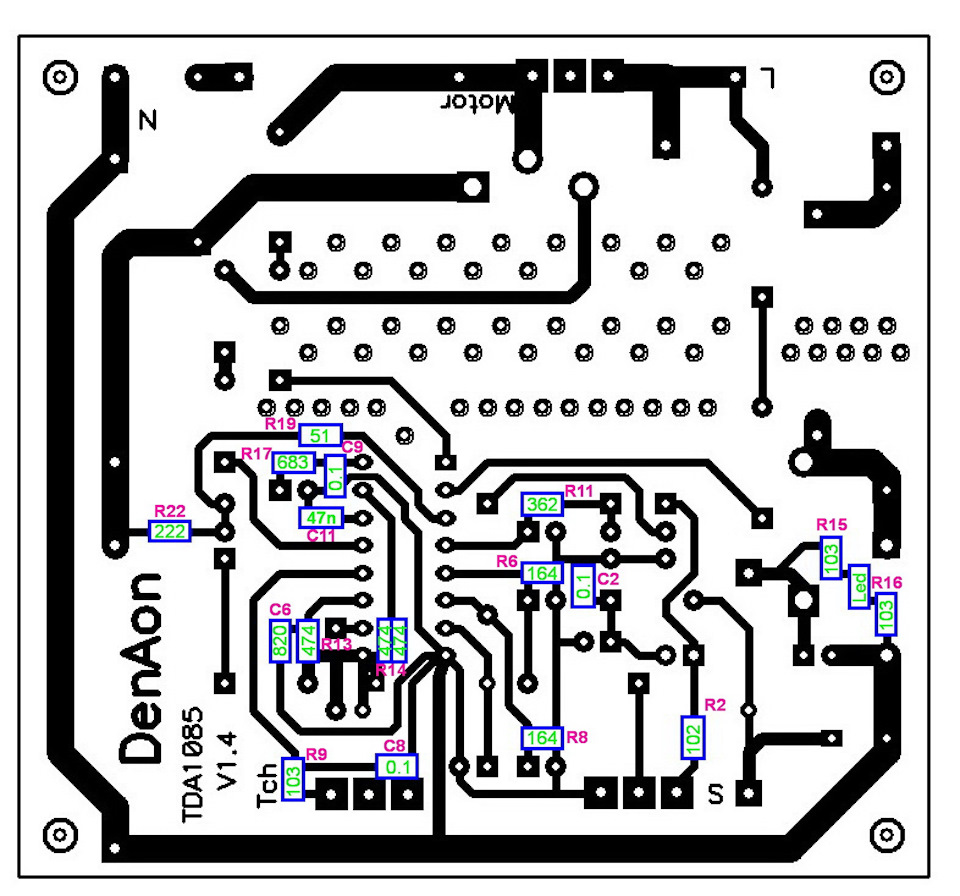
DenAon › Блог › Регулятор оборотов коллекторного двигателя TDA1085

Попросили меня собрать регулятор оборотов коллекторного двигателя от стиральной машины на микросхеме TDA1085. Регулятор исправно заработал, но при сборке кое что мне не понравилось в плате и схеме. Почитав про эту микросхему я скорректировал электрическую схему и разработал свою печатную плату.
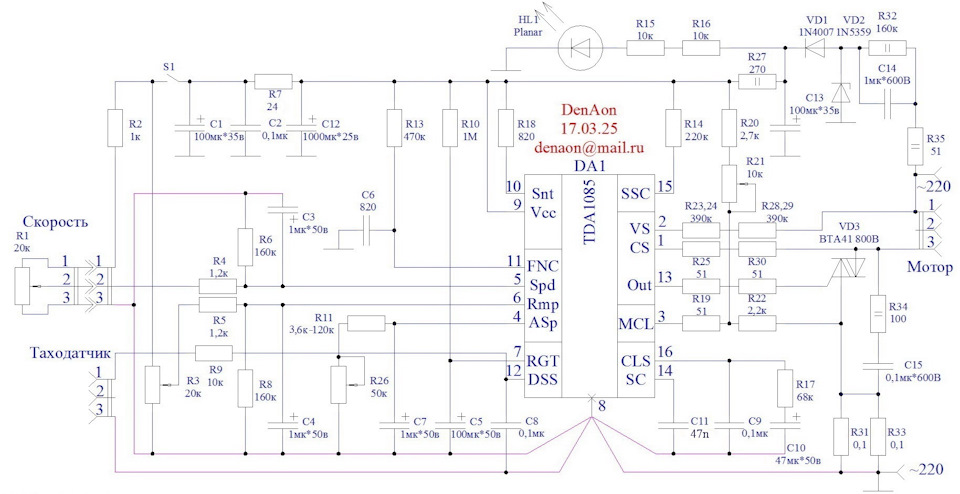
Схема регулятора оборотов получилась вот такая.
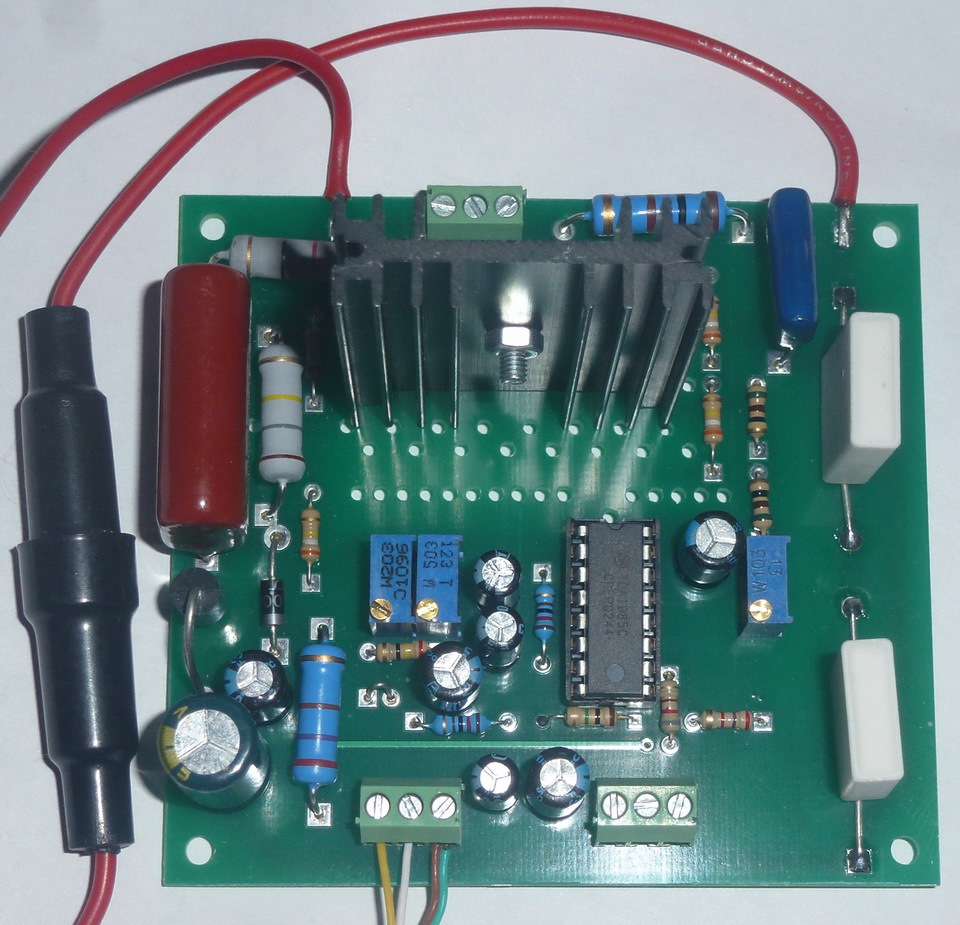
Один из вариантов собранной платы регулятора.
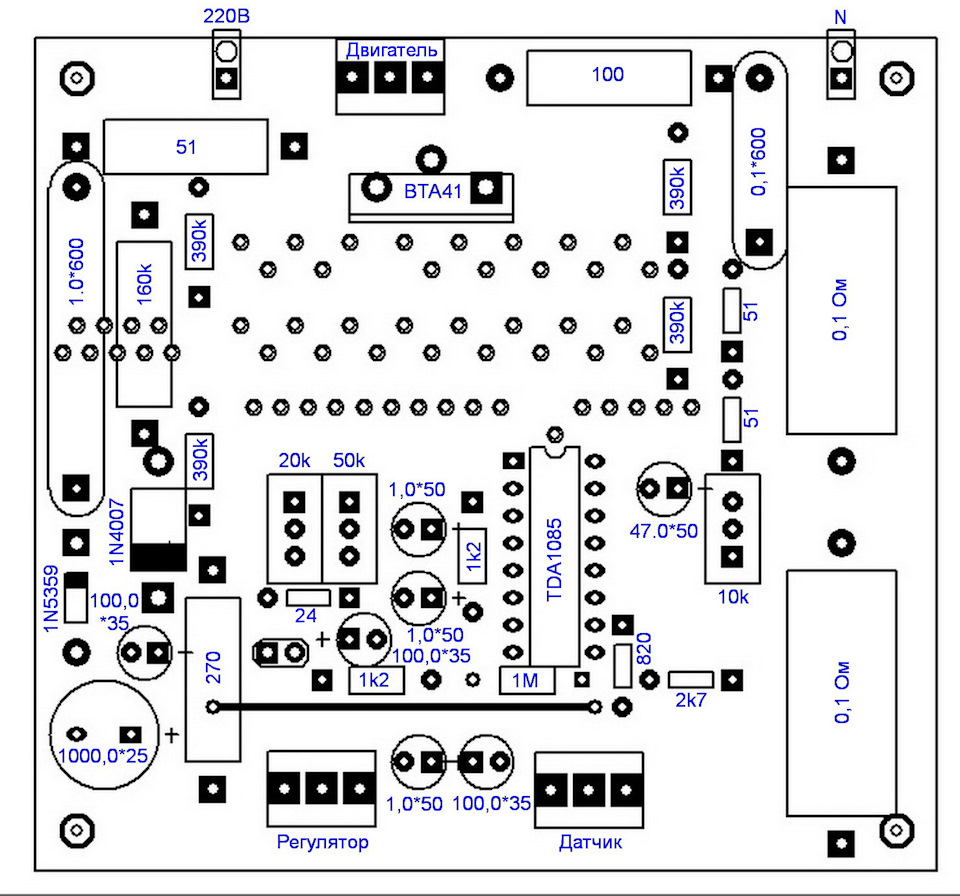
Расположение и номиналы деталей на верхней стороне платы.
Расположение и номиналы деталей на нижней стороне платы.
Видео работы регулятора.
Регулятор оборотов коллекторного двигателя без потерь
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
- Особенности регулирования скорости
- Обобщенная схема регулятора
- Разновидности коллекторных двигателей
- Конструкция мотора
- Выбор схемы
- Особенности конструкции
- Принцип управления
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:

- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Регулятор оборотов коллекторного двигателя от стиральной машины
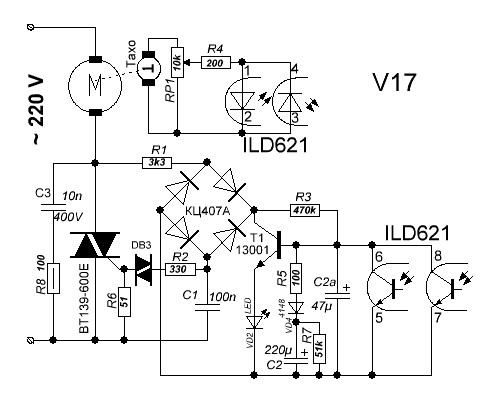
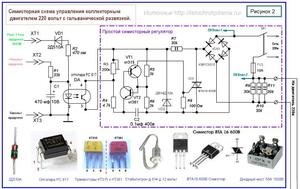
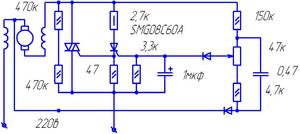
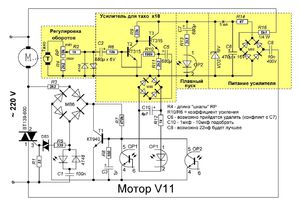
Прекрасный для самоделок мотор от стиральной машины имеет слишком высокие обороты, и малый ресурс на максимальных оборотах. Поэтому я применяю простой самодельный регулятор оборотов (без потери мощности). Схема опробована и показала прекрасный результат. Обороты регулируются примерно от 600 до max.
Потенциометр электрически изолирован от сети, что повышает безопасность пользования регулятором.
Симистор необходимо поставить на радиатор.
Оптопара (2 шт) практически любая, но EL814 имеет внутри 2 встречных светодиода, и просится в эту схему.
Высоковольтный транзистор можно поставить, например, IRF740 (от БП компьютера), но жалко такой мощный транзистор ставить в слаботочную цепь. Хорошо работают транзисторы 1N60, 13003, КТ940.
Вместо моста КЦ407 вполне подойдет мост из 1N4007, или любой на >300V, и ток >100mA.
Регулировка от 600 оборотов подходит для большинства самоделок, но для особых случаев предлагается схема с германиевым транзистором. Минимальные обороты удалось снизить до 200.
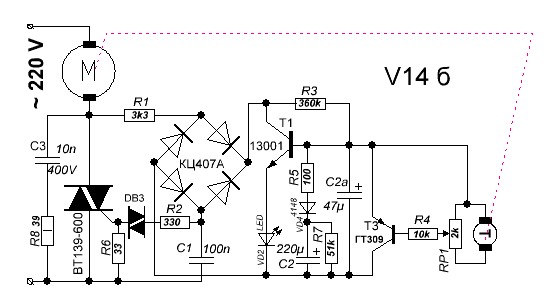
Минимальные обороты получил 200 об/мин (170-210, электронный тахометр на низких оборотах плохо меряет), транзистор Т3 поставил ГТ309, он прямой проводимости,и их много. Если поставить МП39, 40, 41, П13, 14, 15, то обороты должны еще снизиться, но уже не вижу надобности. Главное, что таких транзисторов как грязи, в отличие от МП37 (смотри форум).
Плавный пуск прекрасно работает, Правда на валу мотора пусто, но от нагрузки на валу при пуске, подберу R5 при необходимости.
R5 = 0-3к3 в зависимости от нагрузки;; R6 = 18 Ом — 51 Ом — в зависимости от симистора, у меня сейчас этого резистора нет;; R4 = 3к — 10к — защита Т3;; RР1 = 2к-10к — регулятор скорости, связан с сетью, защита от сетевого напряжения оператора обязательна. Есть потенциометры с пластмассовой осью, желательно использовать. Это большой недостаток данной схемы, и если нет большой необходимости в малых оборотах, советую использовать V17 (от 600 об/мин).
С2 = плавный пуск, = время задержки включения мотора;; R5 = заряд С2, = наклон кривой заряда, = время разгона мотора;; R7 — время разряда С2 для следующего цикла плавного пуска (при 51к это примерно 2-3 сек)

04:24

03:31

05:41
05:02

02:29
![Oliver Tree & Little Big - The Internet [Music Video]](https://i.ytimg.com/vi/5Og1N-BVSwg/0.jpg)
03:36

04:43
![]()
Коллекторные электродвигатели
Коллекторный двигатель (КД) представляет собой электрическую машину, которая преобразовывает электрическую энергию в механическую и обратно. Классифицируются КД по роду питающего тока, их разделяют на следующие группы:
- Питание постоянным током. Имеют простую конструкцию, высокий пусковой момент и управляются плавной регулировкой частоты вращения.
- Универсальные КД можно питать от постоянного и переменного напряжения. Основные достоинства: простота управления, недорогая стоимость и компактность.
КД постоянного тока в зависимости от типа индуктора могут быть на постоянных магнитах или дополнительных катушках возбуждения. Постоянные магниты создают необходимый магнитный поток, способствующий образованию вращающего момента. Двигатели, где применяются катушки возбуждения, различаются по типу обмоток.
Двигатели универсальные состоят из следующих элементов:
![]()
Коллектора.- Щеткодержателей для фиксации щёток.
- Щёток (графитовых или медно-графитовых), служащих для электрического контакта между статорными обмотками и обмотками якоря.
- Статорного сердечника, как правило, состоящего из электротехнической стали.
- Обмотки статора.
- Вала якоря.
Такого типа КД могут быть с параллельным и последовательным возбуждением.
Универсальные двигатели могут работать также и от переменного напряжения, когда при смене полярности в обмотках возбуждения возникает наводящий ток необходимого направления для реверсирования вращения якоря (аверс/реверс). Для регулировки скорости вращения вала электродвигателя, используются различные электрические схемы регуляторов оборотов коллекторных двигателей.
Регуляторы оборотов для КД
Существует несколько типов управляющих схем для регулировки оборотов коллекторных двигателей. Для маломощных устройств с напряжением питания 12 В (вольт) можно использовать реостат или простейшую схему, собранную на транзисторе, за основу которой можно взять любой компенсационный стабилизатор постоянного тока с регулировкой напряжения.
Для плавной регулировки оборотов якоря более мощного КД необходим тиристорный регулятор напряжения постоянного тока. Для протекания тока через тиристор необходимо на его управляющий электрод подать кратковременный импульс. В зависимости от частоты поданных импульсов создаётся порог открывания тиристора, что изменяет величину напряжения на выходе регулятора оборотов. Частоту импульсов можно изменять, включив в схему регулятора генераторный транзистор, например, КТ117, или собрать схему управления на таймере 555 (КР1006ВИ1 отечественного производства).
Такой регулятор постоянного тока можно использовать только с КД постоянного напряжения. Используя тиристоры в высокоиндуктивной нагрузке, так как они могут не до конца закрыться, чревато для выхода из строя регулятора.
![]()
Регулировку рекомендуется производить с помощью регулятора оборотов коллекторного двигателя с обратной связью, который задаёт скорость вращения с помощью формирователя опорного напряжения в схеме. В момент нагрузки скорость вращения снижается, а вместе с ней вращающий момент.
За счёт уменьшения противо-ЭДС между управляющим электродом и катодом тиристора возникшей в двигателе пропорционально увеличится напряжение управления на тиристоре. Увеличение величины напряжения, с малым фазовым углом, открывается тиристор и подаёт на двигатель максимальный ток.
Тиристор подбирается таким образом, чтобы пусковой ток КД не превышал его максимально допустимые параметры. Регулировку можно производить только на КД состоящих из щёточного узла.
Тиристорный регулятор по схематическим соображениям не может регулировать обороты асинхронных электродвигателей.
Особенности бесколлекторного двигателя
![]()
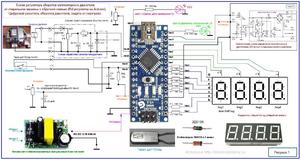
С виду бесколлекторный двигатель схож с КД, но по конструктивным особенностям имеется различие из-за отсутствия коллектора и щёток. В бесколлекторном двигателе постоянные магниты расположены вокруг вала, так называемого ротора, а обмотки находятся непосредственно на статоре вокруг ротора и имеют определённое количество пар полюсов, от которых зависит скорость мотора. Некоторые бесколлекторные моторы оснащаются сенсорными датчиками, предназначенными для слежения за положением ротора, и управляются электронными регуляторами скорости, собранными на контроллере.
Основными достоинствами бесколлекторных моторов являются отсутствие искрения щёток, создающих помехи, и отсутствие постоянного трения, повышающего температуру внутри двигателя. Отсутствие изнашивающихся частей — коллектора и щёток — увеличивает срок эксплуатации таких моторов, не считая замены подшипников. К недостаткам можно отнести лишь высокую стоимость изделия.
Особой популярностью пользуются однофазные асинхронные двигатели переменного тока, которые используют в различных станках на производстве, а также в бытовых электроприборах, где необходимо использовать разные скорости вращения. Для этих целей используется симисторный регулятор мощности для электродвигателя.
Регулятор оборотов асинхронного двигателя своими руками можно сделать на ШИМ-контроллере tda1085, который управляет симистором. Контроллер можно использовать для управления стиральной машиной совместно с таходатчиком, который считывает импульсы от тахогенератора. Регулирование оборотов осуществляется без потери мощности и независимо от нагрузки.
Читайте также: