
Проверка шагового двигателя своими руками
Добавил пользователь Morpheus Обновлено: 05.10.2024
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.
- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
-
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим - ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим - ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим - ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.


Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод, с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель это, как понятно из его названия, двигатель который вращается дискретными перемещениями . Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый и микрошаговый режим , когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы и старые матричные принтеры . Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297 и мощным сдвоенным мостом L298N.
Именно на нем был сделан мой первый силовой блок робота. Кроме него там еще два источника питания на 5 и на 3.3 вольта, а также контроллер двух движков на L293 (такой же как и во второй реализации силового блока). В качестве контроллера тогда был выбран АТ89С2051. Это антикварный контроллер архитектуры MSC-51 в котором из периферии только два таймера, порты да UART, но я его люблю нежно и трепетно, так как первая любовь не проходит никогда =). К сожалению исходники его мега прошивки канули в Лету вместе с убившимся винтом, так что я не могу поделиться теми извращенскими алгоритмами, которые были туда засунуты. А там был и двухканальный ШИМ, и I2C Slave протокол, и контроль за положением шаговика с точным учетом его перемещения. Короче, знатный был проект. Ныне валяется трупом, т.к. все лень запустить Keil uVision и написать новую прошивку. Да и ассемблер С51 я стал уже забывать.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298 , подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298 сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Спасибо. Вы потрясающие! Всего за месяц мы собрали нужную сумму в 500000 на хоккейную коробку для детского дома Аистенок. Из которых 125000+ было от вас, читателей EasyElectronics. Были даже переводы на 25000+ и просто поток платежей на 251 рубль. Это невероятно круто. Сейчас идет заключение договора и подготовка к строительству!
А я встрял на три года, как минимум, ежемесячной пахоты над статьями :)))))))))))) Спасибо вам за такой мощный пинок.
202 thoughts on “Управление шаговым двигателем”
А можешь посоветовать шаговик из тех, которые сейчас можно купить?
Я не знаю как у всех, но я д аже двухдюймовые флопики повыкидывал лет пять назад, а 5-ти дюймовых и в помине не было.
По продаваемым не в курсе. В нашей деревне их в продаже нету, а что там в Московии я даже не знаю.
Оппа, теперь самое время разбираться, что за шаговики у меня имеются по результатам годового потрошения CD-DVD ROM’ов. :)
А в сидюках/дивдюках вроде бы стоят обычные коллекторники+синхронный на шпиндель. Хотя могут быть и шаговики, но я не встречал ни разу.
Шаговики во многих CD/DVD приводах стоят — для таскания каретки с лазером (у меня минимум 3 таких экземпляра валяются). Но конструкция двигателя — как в трехдюймовых дисководах, для практического применения неудачная.
работал с шаговыми движками на своей фирме.
ещё с нашими совеццкими и руссийскими.
сколько раз коротыш верещал на источниках — не счесть ) единственное оправдание — я про них ещё тогда ничего не знал и доков не имел. работал методом тыка…
всё хорошо, но нету обратной связи.
зы! от постоянных замыканий избавлялись частыми переключениями обмоток, когда надо было застопорить двигло.
. в смысле от постоянных замыкани? Как ты умудрялся его коротнуть? Одновременным замыканием ключей верхнего и нижнего плеча? Так там Dead Time надо ставить!
юзал четырёхконтактный.
помню, что если подавать на обмотки долгое время неизменный сигнал, то будет такое.
хотя потом, когда пришёл паспорт на движок, то там было сказано, что можно так стопорить его.
Долгая подача напруги на обмотки это его нормальный рабочий режим. Главное чтобы напряжение было номинальным.
Полезно, спасибо. Мне в свое время довелось раскурочить 8″ дисковод. Два шаговика лежат дожидаются своего часа. Так, что информация может пригодиться.
У меня этих дисководов полтора десятка штук!
Еще одна задача — управление двигателем
постоянного тока на 24 в (12В), реверс,
управление скоростью. Есть буржуйская схема,
но без регулятора, могу тиснуть, схема из
стриммера, реверс-технология схемы.
кто знаком с драйвером шины ULN2804a b ULN2004a , какая разници между ними.
Кажется, один для КМОП, другой — для ТТЛ. Схема отличается только номиналом сопротивления от входного штырька до базы транзистора. В одном случае — 10ком (для КМОП), в другом — кажется, 1,5 ком, точно не помню. Ну, и входные уровни соответственно разные. В остальном — одинаково. Я сам года три назад выбирал, какие брать. А использую все же чаще ULN2003 (привычка, чтоли)…
У меня есть движок от древнего лазерного принтера. Двигатель фирмы CANON PM60-H418Z21B можно ли запустить таку вещь? Торчат из него по 3 провода с каждой обмотки. P.S. С шаговиками я делов не имел пока, но очень интересно.
Думаю без проблем. Судя по признакам это униполярный двигатель. Так что определяй где у него середина обмотки и дальше как я описал. Тока замерь сопротивление, чтобы узнать максимальный ток.
Измерение и контроль токов шаговых двигателей
Измерение и контроль токов шаговых двигателей
задался вопросом -как бы измерить ток в обмотках шаговиков. Для того чтобы подобрать оптимальный ток в драйверах, контролировать, все ли хорошо со станком и смотреть как с этим справляется БП.
Но я хотел вывести все амперметры на панель управления, а тогда мне придется гонять эти токи до панель с амперметрами и обратно. и как то это не хочется, лишние наводки, тратить толстый экранированный кабель..
Кто знает, как вывести амперметры на панель управления, но при этом не гоняя по ним те самые большие токи, которые они измеряют?
я подозреваю что в ответе замешаны шунты.. ) но толком не пойму как именно. ведь шунты они же для изменения пределов измерения..
а не.. кажись я понял. мне нужны трансформаторы тока. кто нибудь заморачивался подобным?
а не)) там же не переменный ток) там постояный. транформатор не прокатит
Лучший контроль - левая рука
ШД при работе должен быть тёплый. Блок питания просто брать с запасом. Один раз настроить по температуре и забыть . Все остальные контроли -лишняя перегрузка ненужной информацией. В автомобилях тоже раньше был указатель давления масла и тока заряда аккумулятора, а сейчас даже и температурный датчик перестали ставить.
Действующее значение силы тока в обмотках двигателя плюс ток ХХ драйвера, который много меньше.
Или кому-то нужна осциллограмма тока в каждой обмотке? Чай не кабина пилотов.
Не прав.
lkbyysq писал(а): Действующее значение силы тока в обмотках двигателя плюс ток ХХ драйвера, который много меньше.
Максимум что потребуется - поправочный коэффициент, типа на два-четыре поделить, чтоб понять ток в каждой обмотке.
"Действующее (эффективное) значение переменного тока равно величине такого постоянного тока, который за время, равное одному периоду переменного тока, произведёт такую же работу, что и рассматриваемый переменный ток."
Чему момент пропорционален? Действующему значению силы тока. Или у автора какие-либо иные цели нежели момент заценивать?
Конечно, если у него исследовательская работа, то я не прав.
Просто не прав.
Если что-то и контролировать, у ШД, так, как сказал Тенгель, температуру.
Кстати, она может доходить градусов до 70 и выше. Не каждая рука такой выдержит.
Правда, был знакомый токарь, так у него любимый прикол - снять голыми руками свежевыточенную деталь со станка и отдать наблюдающему за процессом заказчику.

С целью загладить вину подцепил на один провод шаговика токовый трансформатор 1:2000 к цифровому тестеру на диапазон 20мА.
Движки 86 на 4А. 80 вольт. ШВП 5мм. Без редукции.
На скорости 5000 кажет 1,4 А.
На скорости 1000-2000 кажет 2,5 А.
Че-то кажет. Дальше некогда.
lkbyysq писал(а): С целью загладить вину подцепил на один провод шаговика токовый трансформатор 1:2000 к цифровому тестеру на диапазон 20мА.
эмм трансформатор? то есть фигня что ток не переменный? или импульсы сойдут за переменный? всмысле он же не изменяется по направлению..
хм. датчих холла может лучше..
Правда, был знакомый токарь, так у него любимый прикол - снять голыми руками свежевыточенную деталь со станка и отдать наблюдающему за процессом заказчику.
ага а у меня был знакомый радиомеханик он любил проверять наличие напряжения на плате кинескопа (там киловольты) тыльной стороной ладони.. вот вы видели как в мультике том и джери бьют током и волосы дыбом?? я вот такое увидел в реале..
К сожалению без натурных испытаний нельзя понять подходит ли этот трансформатор для таких частот. В теории магнитопровод внутри может тятуть. На 50Гц правду показывает. Но герцы и сотни килогерц - небо и земля. Осциллограф нужен. Ну и рассчитан ли тестер на такие частоты не знаю.
С датчиком Холла проще наверное, на него точно есть даташиты с частотными характеристиками. Но все равно калибровку проверить стоит по напряжению на токоизмерительных резисторах драйвера.
lexalex83 писал(а): то есть фигня что ток не переменный? или импульсы сойдут за переменный? всмысле он же не изменяется по направлению..
Во-первых, таки изменяется
Во-вторых, сойдут
В-третьих, то, что тестер показал, особенно если он не "true RMS", имеет достаточно опосредованное отношение к току обмотки.
lexalex83 писал(а): был знакомый радиомеханик он любил проверять наличие напряжения на плате кинескопа (там киловольты) тыльной стороной ладони.
Есть такой грех у некоторых электриков. То что тыльной стороной - правильно, нет опасности захватить провод. Сама практика, конечно, идиотская. Потому как, чтобы вызвать фибрилляцию сердца, иногда достаточно совсем небольшого импульса, поданного в "нужный" момент цикла.
lkbyysq писал(а): С целью загладить вину подцепил на один провод шаговика токовый трансформатор 1:2000 к цифровому тестеру на диапазон 20мА.
Движки 86 на 4А. 80 вольт. ШВП 5мм. Без редукции.
На скорости 5000 кажет 1,4 А.
На скорости 1000-2000 кажет 2,5 А.
Че-то кажет. Дальше некогда.
Абсолютно бессмысленные измерения. Ток через обмотку ШД при нормальном драйвере, не зависит от скорости и всегда постоянен и определяется настройкой тока драйвера. Несколько уменьшаться может в режиме удержания (если таковой имеется). А зависимость показаний тестера от скорости, говорит о нелинейности частотных характеристик трансформатора и тестера. И вряд-ли здесь можно измерить ток. Теоретически в режиме вращения можно посмотреть сигнал на токоизмерительном резисторе осциллографом, но форма сигнала скорее всего не даст однозначного ответа. Так что самое простое - измерить напряжение на токоизмерительном резисторе тестером, или ток потребляемый драйвером в статике, это и будет правильное значение. А сказки что ток двигателя больше потребляемого драйвером противоречат закону сохранения энергии. Средний ток ШД будет меньше тока потребляемого драйвером из-за того что у последнего КПД не может быть больше 1.
Ответ: Шаговые двигатели - это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определенный угол. В отличие от обычных двигателей, шаговые двигатели имеют особенности, которые определяют их свойства при использовании в специализированных областях: управляя шаговым двигателем с помощью специального устройства (драйвер шагового двигателя), можно поворачивать его вал на строго заданный угол. Это позволяет применять его там, где требуется высокая точность перемещений. Наглядные примеры это принтеры, факсы, копировальные машины, станки с ЧПУ (Числовое программное управление), фрезерные, гравировальные машины, модули линейного перемещения, плоттеры, установщики радиоэлектронных компонентов. Шаговый двигатель является бесколлекторным двигателем постоянного тока. Как и другие бесколлекторные двигатели, шаговый двигатель высоконадежен и при надлежащей эксплуатации имеет длительный срок службы. Далее: подробно о строении шагового двигателя
Вопрос: Какие достоинства у шаговых двигателей?
Ответ: Достоинства истекают из особенностей конструкции: - Шаговый двигатель может обеспечить очень точное перемещение на заданный угол, причем без обратной связи - поворот ротора зависит от числа поданных импульсов на устройство управления; - высокая точность позиционирования и повторяемость, так качественные шаговые двигатели имеют точность не хуже 5% от величины шага, при этом данная ошибка не накапливается; - хорошая надежность двигателя, обусловленная отсутствием щеток, при этом срок службы двигателя ограничивается лишь ресурсом подшипников; - обеспечивает получение сверхнизких скоростей вращения вала без использования редуктора; - работа в широком диапазоне скоростей, т.к. скорость напрямую зависит от количества входных импульсов. Недостатки - шаговый двигатель подвержен резонансу; - может пропустить шаги и реальная позиция вала окажется рассинхронизирована с позицией, заданной в управляющей системе - низкая удельная мощность шагового привода; - потребляемая энергия не уменьшается при отсутствии нагрузки; - малый момент на высоких скоростях;
Вопрос: Какие бывают шаговые двигатели?
Ответ: Шаговых двигателей существует множество разновидностей. В настоящее время 95% всех шаговых двигателей - гибридные. В зависимости от конфигурации обмоток двигатели делятся: а)Биполярный - имеет четыре выхода, содержит в себе две обмотки. б)Униполярный - имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины. в)Четырехобмоточный - имеет четыре независимые обмотки. Можно представлять его как униполярный, обмотки которого разъединены, а если соединить соседние отводы - получим биполярный двигатель.
В зависимости от типа электронного коммутатора управление шаговым двигателем может быть: однополярным или разнополярным; симметричным или несимметричным; ·потенциальным или импульсным. При однополярном управлении напряжение каждой фазе изменяется от 0 до +U, а при разнополярном – от -U до +U. Управление называется симметричным, если в каждом такте коммутации задействуется одинаковое число обмоток, и несимметричным – если разное.
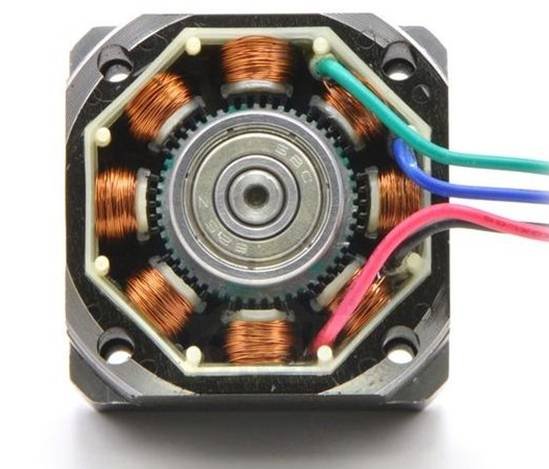
Вопрос: Корпус у меня не разборный, а хочется посмотреть что внутри!
Ответ: Внутри находятся обмотки, зубчатый ротор и несколько подшипников. Не стоит разбирать рабочий двигатель. Ротор устанавливается с малым зазором, кроме того, система ротор-статор образует замкнутый магнитопровод, который намагничивается в собранном состоянии, и двигатель после разборки теряет существенную часть момента.
Вопрос: На какой минимальный угол может повернуться шаговый двигатель?
Вопрос: Какие существуют программы для работы с шаговыми двигателями?
Ответ: Их существует множетсво как перемещение на определенный шаг, так для трехмерного использования. Могут управлять от одного до шести двигателей. Например MACH3, LinuxCNC, Turbocnc, NC Studio.
Вопрос: Как можно повысить точность вращения вала шагового двигателя?
Вопрос: Что означают характеристики шагового двигателя - ток, индуктивность, напряжение и т.п.?
Ответ: Все характеристики двигателя находятся в тесной взаимосвязи и определяют главную - кривую зависимости крутящего момента от скорости. Рассматривать влияение характеристик надо для двигателей одного размера. Момент удержания - пиковое значение крутящего момента двигателя - зависит от тока и индуктивности обмотки. Чем больше индуктивность, тем больший момент удержания можно развить, но тем больше требуется напряжение питания на высоких скоростях, чтобы преодолеть индуктивное сопротивление и закачать нужный ток в обмотку. Ток обмотки также определяет выбор драйвера шагового двигателя. Напряжение питания обмотки равно U = I*R, номинальному току обмотки умноженному на напряжение и показывает, какое постоянное напряжение надо подать на обмотку, чтобы получить номинальный ток и, соответственно, момент удержания. Величина напряжения используется при выборе драйвера и характеристик источника питания.
Вопрос: Какой шаговый двигатель лучше, А или Б?
Ответ: Этот вопрос неоднозначен, но все же дадим пару рекомендаций. Как правило, ориентироваться надо не на момент удержания, а на индуктивность. Лучше работают те двигатели, у которых индуктивность меньше - большинство задач требуют момента на высоких скоростях, и малая индуктивность требует меньшего напряжения питания. Нормальной индуктивностью можно считать 2-5 мГн для двигателей NEMA23 (фланец 57 мм), 4-6 мГн для двигателей NEMA34 (фланец 86 мм). Если А и Б - двигатели разного размера, смотрите кривую зависимости момента от скорости - чем она более пологая, тем лучше. См. более подробный алгоритм выбора шагового двигателя.
Вопрос: Что такое драйвер управления шаговым двигателем?
Ответ: Драйверы шаговых двигателей используются для управления биполярными и униполярными шаговыми двигателями с полным шагом, половинным и микрошагом. Они действуют как посредники между компьютером и двигателем и должны подбираться по напряжению и уровню мощности, типу сигнала (аналоговый и цифровой). Тип двигателя является самым важным фактором при выборе драйвера. В униполярном или биполярном двигателе ток проходит только в одном направлении по обмотке. Биполярные шаговые двигатели имеют две обмотки через которые ток проходит поочередно. Шаговые двигатели с полным шагом приводятся в движение благодаря изменениям магнитного поля относительно ротора. Полушаговые двигатели в свою очередь действуют также, как двигатели с полным шагом однако угловое перемещение ротора составляет половину шага полношагового двигателя. На каждый второй шаг запитана лишь одна фаза, а в остальных случаях запитаны две. В результате угловое перемещение ротора составляет половину угла. Микрошаговые или минишаговые двигатели отличаются дискретным числом угловых перемещений угловых положений между каждым полным шагом. В драйверах минишаговых и микрошаговых двигателей используются электронные методы улучшения позиционного решения системы управления. Драйверы шаговых двигателей отличаются по электрическим характеристикам, параметрам управления, размерам и техническим характеристикам. Электрические характеристики включают в себя максимальное напряжение на входе, номинальную мощность, силу тока на выходе, максимальная сила тока на выходе, питание переменным и постоянным током. Драйверы для шаговых двигателей могут быть однофазными или трех фазными с частотой в 50, 60, или 400 Гц. Параметры управления включают в себя особенности установки и управления. В некоторых драйверах используются ручные средства управления типа кнопок, DIP-переключателей или потенциометров. В других используются джойстики, цифровые пульты управления, компьютерные интерфейсы, или слоты для карт PCMCIA (Международная ассоциация производителей карт памяти для персональных компьютеров). Программы контроля могут быть сохранены на передвижных, энергонезависимых носителях данных. Переносные блоки управления разработаны для управления с удаленных точек. Также доступно беспроводное и WEB управления. Форма драйверов позволяет сборку модуля в нескольких конфигурациях. Большинство устройств могут монтироваться на шасси, контактные DIN рельсы, панели, стойки, стены или печатные платы (PCB). Также возможна установка автономных устройств и интегральных микросхем, которые монтируются на печатные платы. Особенности драйверов: подавление резонанса; вспомогательные входы/выходы (I/O); мягкий старт; автонастройка, самодиагностика и проверка состояния; а так же сигнализация в таких случаях как перенапряжение. В драйверах используют много различных типов шин и коммуникационных систем. Шинные типы: (ATA), (PCI), (IDE), (ISA), (GPIB), (USB) и (VMEbus). Коммуникационные стандарты: ARCNET, AS-i, Beckhoff I/O, CANbus, CANopen, DeviceNet, Ethernet, (SCSI) и (SDS). Также доступно большое количество последовательных и параллельных интерфейсов. Соответствующая статья поможет подобрать драйвер биполярного двигателя для станка с ЧПУ.
Вопрос: Как узнать, подходит ли двигатель А к драйверу Б
Ответ: Чтобы это узнать, сделайте следующее: 1) проверьте, может ли драйвер выдавать ток фазы, равный(или примерно равный)току, указанному производителем двигателя. Если ток драйвера заметно меньше тока фазы двигателя - драйвер не подходит. 2) Вычислите максимальное напряжение питания двигателя по формуле Umax = 32 * sqrt (L), где L - индуктивность обмоток двигателя в миллигенри(указывается производителем). Желательно, чтобы максимально допустимое напряжение питания драйвера было примерно равно этому значению, или было немного больше. Если это условие не выполняется, то скорее всего двигатель вращаться будет, но больших скоростей достичь не удастся. Пример:подходит ли драйвер PLD545-G3 для двигателя PL86H151? Ток обмотки двигателя - 4.2 А, ток, выдаваемый драйвером - до 5А, первое условия выполнено. Индуктивность двигателя - 12 мГн, по формуле получаем Umax = 32 * sqrt(12) = 110 Вольт. Максимальное напряжение питания драйвера - 45 Вольт. Это означает, что двигатель будет отдавать момент только на низких оборотах, а для получения качественного движения необходимо использовать или драйвер с напряжением питания до 80 Вольт(например, PLD86 или PLD880), или двигатель с меньшей индуктивностью.
Вопрос: У меня перегревается двигатель, что делать?
Ответ: Для начала надо определить, действительно ли двигатель перегревается. Многие воспринимают рабочую температуру двигателя как перегрев, потому что её "не терпит рука", тогда как нагрев в 80 градусов - нормальное явления для шагового двигателя. Поэтому необходимо замерить реальную температуру. Если она меньше 80 градусов - беспокоиться не стоит. Если больше - первое, что необходимо проверить, это выставленный рабочий ток на драйвере. Он должен соответствовать номинальному току двигателя. Также можно использовать функцию снижения тока обмоток в режиме удержания. К снижению нагрева приводит также снижение питающего напряжения, однако, и момент тоже снизится. Если нет возможности жертвовать динамикой двигателя, остается единственный способ - установить на корпус ШД радиатор и/или вентилятор.
Вопрос: Шаговый двигатель постоянно пропускает шаги. Что делать?
Ответ: Пропуск шагов - самая неприятная проблема у шаговых приводов. Причин может быть множество. В порядке убывания распространенности:
Не знаю как сформулировать толком вопрос.
Касается скорости вращения.
пытался шаг задавать и типа что то скорость увеличивать и уменьшать.
при так называемых нормальных настойках двигун спокойно и ровно крутится, если задавать обороты выше, что то как то не так начинает работать а после при привышении останавливается и гудит.
думал его на тыщщу другу оборотов раскрутить а он точнее все они движки которые попадались, вертятся медленно.
оно так должно быть или возможно их раскрутить на большие обороты?
_________________
Лечу лечить WWW ашу покалеченную технику.
при так называемых нормальных настойках двигун спокойно и ровно крутится, если задавать обороты выше, что то как то не так начинает работать а после при привышении останавливается и гудит.
Все понятно, что ничего не понятно. Как управляете? Сразу подаете импульсы высокой частоты или нет?
По симптомам, похоже что сразу.
Есть у ШД такой параметр частота приемистости (ЧП). Этот параметр показывает, какую частоту управляющих импульсов ротор ШД, находящийся в покое, может отработать без потери шагов.
А для разгона надо подавать заведомо низкие частоты (ниже ЧП), а затем повышать. Повышать лучше по кривой корня или логарифма.
Для примера, ДШИ-360-1-0,16 имел ЧП около 680 Гц, разгонялся в графопостроителях до частоты управления 5кГц.
_________________
Загружая на вход компьютера "мусор", на выходе получим "мусор^32".
PS. Не работаю с: Proteus, Multisim, EWB, Micro-Cap. не спрашивайте даже
JLCPCB, всего $2 за прототип печатной платы! Цвет - любой!
думал его на тыщщу другу оборотов раскрутить а он точнее все они движки которые попадались, вертятся медленно.
Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет
Если говорить простыми словами, то нужно увеличивать момент двигателя. На больших частотах, ток в обмотках не успевает нарастать из-за индуктивной нагрузки, отсюда теряем момент. Чтобы увеличить ток, нужно увеличивать напряжение. Только на низких частотах это увеличение может плачевно сказаться на двигателе.
Приглашаем 27/01/2022 всех желающих посетить вебинар, посвященный двум наиболее растущим сегментам интегрированных источников питания – AC/DC малой мощности (1-20Вт) и сегменту решений PoL без изоляции. На вебинаре рассмотрим проблему выбора AC/DC в бюджетном сегменте и концепцию тестирования ускоренного старения, проведем сравнительный анализ подходов к интеграции AC/DC модулей. Сделаем обзор решений концепции POL с доисторических времен до современных технологий и средств для разработки и тестирования.
В схеме Алексея именно так и сделано(применяетса логарифмический переменник).Если пожертвовать переключателем направления,то можно будет дописать управление 317 по освободивщемуся порту какраз для увеличения напряжения при увеличении частоты.
Компания Mornsun выпустила три серии источников питания с креплением на DIN-рейку в форм-факторе Home Automation на популярные значения выходной мощности 30, 60 и 100 Вт (серии LI30-20/PR2, LI60-20/PR2, LI100-20/PR2). Эти источники питания относятся ко второму поколению продукции (R2) и характеризуются высокой надежностью и хорошей стоимостью.
Мне шаговый двигатель 57byg(по-моему 912)даташита на него не нашёл,удалось раскрутить драйвером L297 + L298 только до 240 оборотов,а потом такая же картина как у вас.Но я подумал,что это его максимальные обороты.К тому-же для проекта необходимо была регулировка 40-100 оборотов.
Зато какой крутящий момент на валу.
В этом тестере можно и плавно и сразу или даже с некоторой частоты включить двигун.
И направление так же можно менять, точнее плавное убывание и плавное нарастание.
раз описалово не видно
драйвером L297 + L298 и управляет им МК
Да верно, крутящий момент там не слабый.
ВОт по этому хотел увеличить обороты не для ЧПУ
Питание могу подавать от 12 до 21в
минимум - это устройство может принять
максимум - мой БП может выдать, хотя могу и 40 подать.
Видно количество оборотов будет зависеть от движка.
_________________
Лечу лечить WWW ашу покалеченную технику.
Читайте также: