
Как сделать точку подвеса
Обновлено: 08.07.2024
Аннотация научной статьи по механике и машиностроению, автор научной работы — Ефимов Вадим Викторович
Приведены результаты исследований проблемы гашения колебаний физического маятника с помощью ускоренных перемещений его точки подвеса, которые можно использовать при разработке приемов пилотирования вертолета с грузом на внешней подвеске.
Похожие темы научных работ по механике и машиностроению , автор научной работы — Ефимов Вадим Викторович
Вывод приближенных аналитических зависимостей характеристик колебательного процесса груза на внешней тросовой подвеске вертолета. .
Исследование условий возникновения особых ситуаций при транспортировке груза на внешней тросовой подвеске вертолетаа
RESEARCH OF FLUCTUATIONS OF THE PHYSICAL PENDULUM WITH THE MOBILE POINT OF FASTENING AS SIMPLIFIED MODEL OF CARGO ON THE EXTERNAL SLING OF THE HELICOPTER
Results of researches of a problem of clearing of fluctuations of a physical pendulum by means of the accelerated moving of its point of fastening which can be used by working out of receptions of piloting of the helicopter with cargo on an external sling are presented.
НАУЧНЫЙ ВЕСТНИК МГТУ ГА серия Аэромеханика и прочность
ИССЛЕДОВАНИЕ КОЛЕБАНИЙ ФИЗИЧЕСКОГО МАЯТНИКА С ПОДВИЖНОЙ ТОЧКОЙ ПОДВЕСА КАК УПРОЩЕННОЙ МОДЕЛИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА
Статья представлена доктором технических наук, профессором Ципенко В.Г.
Приведены результаты исследований проблемы гашения колебаний физического маятника с помощью ускоренных перемещений его точки подвеса, которые можно использовать при разработке приемов пилотирования вертолета с грузом на внешней подвеске.
Полеты вертолетов с грузом на внешней тросовой подвеске стали в настоящее время делом привычным, доказавшим свою эффективность на практике. Однако эффективность эта достигается чаще всего за счет применения экспериментальных методов исследований: лабораторных, стендовых, летных. Теоретические же методы исследований используются в данной области пока не столь широко. Тому есть объективные причины, связанные, прежде всего, со сложностью математического описания динамики системы "вертолет - груз", с большим количеством факторов, влияющих на эту динамику, с тем, что в недалеком прошлом в распоряжении исследователей просто не было достаточно производительных компьютеров для проведения вычислительных экспериментов и создания соответствующих пилотажных стендов.
Тем не менее, к настоящему моменту достигнуты определенные успехи в создании математической модели динамики системы "вертолет - груз" [1 - 6]. В данных работах представлены основные положения трехмерной математической модели движения груза на внешней подвеске вертолета и взаимного влияния вертолета и груза на движение друг друга. При этом, однако, учтены еще далеко не все существенные факторы, влияющие на динамику столь сложной системы. Еще немало усилий потребуется для создания достаточно адекватной математической модели и соответствующего программного обеспечения, которые смогут, например, позволить построить пилотажный стенд для реальной отработки первичных навыков проведения строительномонтажных работ с помощью вертолетов, а также решать научно-практические задачи, связанные с применением вертолетов с грузом на внешней подвеске.
Однако для выяснения некоторых вопросов функционирования сложной технической системы иногда бывает выгодно наоборот несколько упростить ее модель, чтобы лучше представить наиболее существенные внутренние и внешние связи этой системы. Так, например, для рассматриваемой системы " вертолет - груз" представляет интерес влияние движения точки подвеса груза к вертолету на колебания груза, особенно с точки зрения гашения этих колебаний.
Из практики проведения строительно-монтажных работ с помощью вертолетов и транспортировки грузов на их внешней подвеске известно, что в результате воздействия атмосферной турбулентности, аэродинамической несимметрии груза, непреднамеренных действий летчика или по иной причине возможно появление колебаний груза относительно точки подвеса на вертолете. Это могут быть поперечные колебания, продольные колебания, вращательные колебания (вокруг оси троса, вызывающие его закручивание), сочетание данных видов колебаний [6]. Неконтролируемое раскачивание груза может вызвать возникновение особой ситуации в полете, которая при неблагоприятном развитии может привести к авиационному происшествию. Наибольшую опасность представляют продольно-поперечные колебания.
Методы борьбы с продольно-поперечным раскачиванием груза известны и применяются на практике [6]: снижение скорости полета, создание вертикальных и горизонтальных уско-
рений вертолета (т.е. точки подвеса груза на вертолете). В связи с этим представляет интерес следующий вопрос: как должна двигаться точка подвеса груза, чтобы как можно быстрее погасить колебания?
Чтобы ответить на эти и другие аналогичные вопросы, можно было бы использовать вышеупомянутую трехмерную математическую модель системы "вертолет - груз”. Однако сложность данной модели и соответствующего программного обеспечения, которое потребуется определенным образом доработать, могут привести, во-первых, к неоправданным трудозатратам, а во-вторых, затруднить поиск наиболее существенных взаимосвязей.
В связи с этим для осмысления физики явления и выявления главных факторов перейдем в настоящей работе к упрощенной модели явления, а полученные выводы могут быть позже проверены с помощью более точных моделей или даже натурных испытаний.
В модели, описанной в работах [1 - 6], груз на внешней тросовой подвеске вертолета рассматривается как сферический физический маятник с подвижной точкой подвеса. В настоящей работе упростим модель, и будем рассматривать колебания груза в одной плоскости. Перемещения точки подвеса будут происходить тоже только в этой плоскости. Дополнительно введем следующие допущения:
- трос подвески является абсолютно жестким;
- шарнир в точке подвеса груза является идеальным;
- аэродинамическое демпфирование колебаний отсутствует;
- груз по форме представляет собой шар, радиус которого значительно меньше длины троса;
- трос крепится к грузу в его центре масс.
Схема исследуемой колебательной системы показана на рис. 1.
Рис. 1. Схема колебательной системы
При неподвижной точке подвеса получим уравнение собственных колебаний физического маятника:
где I - момент инерции груза относительно точки подвеса; X - угол отклонения троса от вер/е Л ч Ч X
тикали (X > 0, если трос отклоняется вправо); Х =—;— угловое ускорение; т - масса груза;
g - ускорение свободного падения; гт - длина троса (гт > 0).
При ускоренном перемещении точки подвеса в центре масс груза будут возникать силы инерции, которые будут влиять на колебания маятника. В связи с этим уравнение колебаний маятника с подвижной точкой подвеса можно записать следующим образом:
1Х+mgГт sinX = -ш|х Гт ^Х-sinX, (2)
где |х, |у - ускорения точки подвеса вдоль соответствующих осей системы координат.
Собственный момент инерции шара (выше принято допущение, что груз имеет именно такую форму) вокруг оси, перпендикулярной плоскости колебаний груза, значительно меньше момента инерции груза относительно точки подвеса груза на вертолете, поэтому уравнение (2) можно упростить следующим образом, разделив его на массу груза т и длину троса гт:
гт Х+gsinX = -jxcosX-• у^. (3)
Из уравнения (3) видно, что при определенных условиях с помощью целенаправленного изменения во времени ускорений |х и |у можно погасить возникшее по тем или иным причинам раскачивание груза. Для решения данной задачи можно использовать теорию автоматического регулирования (управления) [7 - 9]. Из данной теории известны различные виды законов регулирования, т.е. зависимостей, связывающих регулирующее воздействие I (в данном случае - ускорение) с отклонением регулируемой величины АХ (рассогласованием между заданным и текущим значениями угла отклонения троса от вертикали). Наиболее распространенными являются регуляторы, реализующие следующие законы регулирования и их сочетания [7]:
- регулирующее воздействие пропорционально интегралу от отклонения регулируемой
величины: I = к и | АХ&;
- регулирующее воздействие пропорционально отклонению регулируемой величины:
- регулирующее воздействие пропорционально производной отклонения регулируемой
величины по времени: | = к д--.
Здесь ки, кп, кд - соответствующие передаточные коэффициенты.
Выберем в качестве регулятора последовательное пропорционально-дифференцирующее звено, часто реализуемое в автопилотах:
Подбор передаточных чисел данного закона регулирования (настройка) является отдельной нетривиальной задачей. Здесь, прежде всего, нужно выбрать показатели качества процесса регулирования. В теории автоматического регулирования рассматривается множество таких показателей (временные, интегральные и др.). Для решения данной задачи наиболее подходящим показателем качества можно считать длительность процесса регулирования 1р (время регулирования), т.е. промежуток времени между началом процесса регулирования и тем моментом, когда разница между текущим и заданным значением регулируемой величины перестанет быть больше заранее оговоренной. Например, когда текущее и заданное значения различаются, не более чем на ± 5% [8]. В рассматриваемом случае заданное значение регулируемой величины равно нулю, поэтому временем регулирования будем считать промежуток времени между началом процесса регулирования и тем моментом, когда текущее значение регулируемой величины перестанет быть больше ± 5% от начального отклонения.
Выбор данного критерия качества процесса регулирования оправдан главным образом тем, что при возникновении особой ситуации, связанной с раскачиванием груза, основной задачей является наиболее быстрое гашение возникших колебаний.
Таким образом, требуется подобрать передаточные числа закона регулирования (4) так, чтобы время регулирования было бы наименьшим. При этом, однако, требуется ввести ограничения на располагаемые величины ускорений точки подвеса |х и |у, поскольку если не вводить эти ограничения, то можно погасить возникшие колебания за доли секунды, но при этом потребуются такие ускорения, которые вертолет в принципе не может развить.
Ориентировочные располагаемые величины ускорений можно найти, проанализировав Руководство по летной эксплуатации (РЛЭ) вертолета, например, вертолета Ми-8МТВ. В п. 7.10.9.1 данного РЛЭ записано, что при горизонтальном разгоне вертолета максимальное возрастание скорости за одну секунду в среднем составляет 6 км/ч 9 км/ч. Сведений о располагаемых поперечных ускорениях в данном РЛЭ, к сожалению, нет. В связи с этим в качестве максимального ускорения |х примем нижнюю границу указанного диапазона, что при переводе в СИ составит примерно 1,7 м/с2.
Что касается ускорений, развиваемых в вертикальной плоскости, то их можно в первом приближении определить из сопоставления располагаемой тяги несущего винта (НВ) с весом вертолета. В п. 7.11 вышеупомянутого РЛЭ приведен график зависимости тяги НВ от высоты висения. В качестве максимального располагаемого примем значение тяги, равное 13000 кгс. Таким образом, при нормальной взлетной массе вертолета 11000 кг (с учетом груза на внешней подвеске массой 3000 кг) будет иметься избыток тяги 2000 кгс, что обеспечит значение вертикального ускорения |у не более 1,8 м/с2.
Отметим особо, что в данной работе не учитывается инерционность, которой обладает реальный вертолет, его системы и силовая установка, не учитывается запаздывание, связанное с реакцией пилота и т.п. Здесь рассматривается лишь идеальный регулятор, который позволяет погасить колебания физического маятника.
Для определения передаточных коэффициентов кп и кд используем метод случайного поиска [9]. Для его реализации было создано соответствующее программное обеспечение, которое позволяет путем проведения вычислительных экспериментов подобрать близкие к оптимальным (по условию минимизации времени регулирования 1р) значения передаточных коэффициентов.
В качестве объекта исследований был рассмотрен маятник с массой груза 3000 кг и длиной троса 30 м. Эти параметры характерны для грузов, перевозимых на внешней подвеске вертолета Ми-8. В качестве начального угла отклонения троса примем максимальный угол отклонения троса от вертикали в поперечной плоскости для вертолета Ми-8, который должен быть не более 25° по условию касания тросом окантовки люка в полу грузовой кабины.
В результате был получен переходный процесс, представленный на рис. 2. Время регулирования оказалось равным 6,94 с. При этом ускорения по осям Ох и Оу изменялись так, как показано на рис. 3. Изменения скоростей точки подвеса вдоль осей Ох и Оу по времени показаны на рис. 4. Траектория точки подвеса маятника представлена на рис. 5.
В ходе проведения вычислительных экспериментов было отмечено, что ускоренное перемещение точки подвеса маятника вдоль вертикальной оси Оу очень слабо влияет на качество переходного процесса, т.е. в данном случае - на время регулирования 1р. Это связано, по-видимому, с тем, что вертикальное ускорение |у, если так можно выразиться, используется неэффективно. Ускорение |у входит в формулу (3) умноженным на синус угла отклонения троса от вертикали. Колебания маятника проходят в достаточно узком диапазоне углов вокруг нулевого угла. При этом синус угла будет мал, а значит, и все слагаемое |^тХ будет невелико. Чтобы участие этого слагаемого было значительным, нужны большие вертикальные ускорения, которые, во-первых, ни один вертолет развить не сможет, а во-вторых, при этом
О 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Рис. 2. Переходный процесс при перемещении точки подвеса маятника по вертикальной и
0 2 4 6 8 10 12 14 16 18 20
Рис. 3. Ускорения точки подвеса маятника по вертикальной и горизонтальной осям
0 2 4 6 8 10 12 14 16 18 20
Рис. 4. Скорости точки подвеса маятника по вертикальной и горизонтальной осям
возникнут такие инерционные нагрузки, которые подвеска груза к вертолету просто не выдержит. Либо угол отклонения груза должен быть очень большим (45° и более), хотя при таких углах отклонения груз может быть аварийно сброшен. Следует отметить, что в ходе вычислительных экспериментов при условии перемещения точки подвеса только по вертикали передаточные числа закона управления, обеспечивающие сколько-нибудь удовлетворительное время регулирования, так и не были найдены.
25 -20 -15 -10 -5 0
Отклонение вдоль оси ОХ. м
Рис. 5. Траектория точки подвеса маятника
Теперь, если разрешить перемещение точки подвеса только по горизонтальной оси Ох, то можно получить переходный процесс с незначительно большим временем регулирования, равным 7,19 с. Этот переходный процесс показан на рис. 6. На рис. 7 и 8 показаны соответственно изменения ускорения и скорости точки подвеса по времени для данного случая.
О 1 2 3 4 5 6 7 В 9 10 11 12 13 14 15 16 17 18 19 20
Рис. 6. Переходный процесс при перемещении точки подвеса маятника только по горизонтальной оси
Таким образом, погасить колебания маятника за приемлемое время можно, перемещая его точку подвеса только в горизонтальной плоскости. Что касается непосредственно груза на внешней подвеске вертолета, то в работе [6] указывается, что поперечные колебания груза можно погасить за счет кратковременного смещения вертолета в горизонтальной плоскости в сторону отклонения груза, но такая техника пилотирования сложна и требует специальной подготовки пилота.
О 2 4 6 8 10 12 14 16 18 20
Рис. 7. Ускорения точки подвеса маятника по горизонтальной оси
0 2 4 6 8 10 12 14 16 18 20
Рис. 8. Скорости точки подвеса маятника по горизонтальной оси
Тем не менее, главным фактором, гасящим колебания, является ускоренное перемещение точки подвеса в горизонтальной плоскости, что явствует из математического описания колебательного процесса. Вычислительные эксперименты, описанные в настоящей работе, подтверждают эту идею. Поэтому в целях повышения безопасности полетов вертолетов с грузом на внешней подвеске следует при подготовке пилотов уделять особое внимание обучению наиболее эффективным приемам гашения колебаний груза, что требует создания специализированных пилотажных стендов или тренажеров нового поколения, позволяющих отрабатывать данные приемы.
1. Ефимов В.В. Математическое описание движения груза на внешней подвеске вертолета. // Научный Вестник МГТУ ГА, серия Аэромеханика и прочность, № 111, 2007.
2. Ефимов В.В., Кубланов М.С., Ципенко В.Г. К вопросу о создании математической модели движения вертолета и груза на его внешней подвеске // Материалы XVIII школы-семинара "Аэродинамика летательных аппаратов". ЦАГИ, 2007.
3. Исследование проблемы обеспечения безопасности полетов при выполнении авиационных работ с применением специальных технических средств: Отчет о НИР (заключительный) / Руководитель М.С. Кубланов, Ответственный исполнитель В.В. Ефимов. № ГР 01200607252. Инв. № 02200704155. - М.: МГТУ ГА, 2007.
4. Ефимов В.В., Паршенцев С.А. О результатах вычислительных экспериментов по исследованию динамики некоторых типов грузов на внешней тросовой подвеске вертолета // Материалы XIX школы-семинара "Аэродинамика летательных аппаратов". ЦАГИ. 2008.
5. Ефимов В.В., Паршенцев С.А. Результаты вычислительных экспериментов по исследованию динамики вертолета и груза на его внешней тросовой подвеске при полете в неспокойном воздухе // Научный Вестник МГТУ ГА, серия Аэромеханика и прочность, № 125, 2008.
6. Козловский В.Б. и др. Вертолет с грузом на внешней подвеске / В.Б. Козловский, С.А. Паршенцев, В.В. Ефимов; Под ред. В.Б. Козловского. - М.: Машиностроение / Машиностроение-Полет, 2008.
7. Лернер А.Я. Введение в теорию автоматического регулирования. - М.: Машгиз, 1958.
8. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем: Учебник для вузов. Изд. 4-е, перераб. и доп. - М.: Машиностроение, 1978.
RESEARCH OF FLUCTUATIONS OF THE PHYSICAL PENDULUM WITH THE MOBILE POINT OF FASTENING AS SIMPLIFIED MODEL OF CARGO ON THE EXTERNAL SLING OF
Results of researches of a problem of clearing of fluctuations of a physical pendulum by means of the accelerated moving of its point of fastening which can be used by working out of receptions of piloting of the helicopter with cargo on an external sling are presented.
Сведения об авторе
Ефимов Вадим Викторович, 1965 г.р., окончил МАИ им. С. Орджоникидзе (1988), кандидат технических наук, доцент кафедры аэродинамики, конструкции и прочности ЛА МГТУ ГА, автор более 30 научных работ, область научных интересов - математическое моделирование, системотехника, эффективность летательных аппаратов.
()\[\]\\.,;:\s@"]+)*))@((\[3<1,3>\.6<1,3>\.8<1,3>\.4<1,3>])|(([a-zA-Z\-0-9]+\.)+[a-zA-Z]))$" data-product-timer="800" data-hint-timer="400" data-search-version="false" data-search-hints-error="Ничего не найдено" data-password-reg data-input-counter-max="999" data-path-product-href="/product/-/" data-path-compare-href="/catalogue/compare/" data-pages-not-need-fixed-header="/catalogue/compare/" data-compare-page-ajax-href="/catalogue/compare/_jcr_content/content/" data-articles-ajax-href="/_jcr_content/articlesContent/" data-search-href="/search/" data-plp-variant-card-ajax-href="/_jcr_content/plpVariantCard/" data-pdp-variant-card-ajax-href="/_jcr_content/pdpVariantCard/" data-pdp-complementary-ajax-href="/_jcr_content/pdpComplementary/" data-product-pickup-stores-ajax-href="/_jcr_content/productPickupStores/" data-forgot-password-ajax-href="/_jcr_content/forgotPassword/" data-reset-password-ajax-href="/_jcr_content/resetPassword/" data-activate-account-ajax-href="/bin/api/ActivateAccountServlet" data-shop-list-ajax-href="/_jcr_content/shopList/" data-quick-view-popup-ajax-href="/_jcr_content/product-quick-view/" data-shop-list-popup-ajax-href="/_jcr_content/shopListPopup/" data-plp-card-products-items-ajax-href="/_jcr_content/plpCardProductItems/" data-search-tab-products-ajax-href="/search/_jcr_content/searchTabProducts/" data-search-tab-products-items-ajax-href="/search/_jcr_content/searchTabProductItems/" data-search-tab-advice-ajax-href="/search/_jcr_content/searchTabAdvice/" data-search-tab-service-ajax-href="/search/_jcr_content/searchTabService/" data-basket-popup-ajax-href="/_jcr_content/basketPopup/" data-basket-ajax-href="/_jcr_content/basket/" data-shopping-list-page-ajax-href="/shopping-list/_jcr_content/content/" data-shop-list-storage-sync-ajax-href="/_jcr_content/shopListStorageSync/" data-addresses-servlet-ajax-href="/content/elbrus/moscow/ru/_jcr_content/addressesServlet" data-address-delete-servlet-ajax-href="/content/elbrus/moscow/ru/_jcr_content/addressDeleteServlet" data-basket-page-url="/basket/" data-basket-page-popup-url="/basket/" data-success-page-url="/checkout/success/" data-basket-type-ajax-href="/content/elbrus/moscow/ru/_jcr_content/checkout.basket-type.json" data-product-source-country-ajax-href="/_jcr_content/productGetSourceCountry/" data-compare-page-source-countries-ajax-href="/_jcr_content/comparePageGetSourceCountries/" data-address-edit-form-ajax-href="/_jcr_content/addressesCreator/" data-viewed-products-pdp-ajax-href="/product/_jcr_content/par/viewed/" data-product-characteristicts-ajax-href="/catalogue/compare/_jcr_content/characteristics/" data-store-stock-ajax-url="/_jcr_content/storeStock/" data-store-stock-option-ajax-url="/_jcr_content/storeStockOption/" data-home-path="/" data-shop-list-synchronize="/_jcr_content/shopListActualGet/" data-catalog-url="/catalogue/" data-path-kitchen-planner="/catalogue/kuhni/mebel-dlya-kuhni/proekt-kuhni/konstruktor/" data-catalog-button-ajax-href="/_jcr_content/catalogButton/" data-service-level-form-ajax-href="/_jcr_content/serviceLevelForm/" data-uccp-reload-ajax-href="/_jcr_content/uccpReload/" data-path-prefix="/content/elbrus/moscow/ru" data-login-page-url="/login/" data-path-suffix=".html" data-community-host="community.leroymerlin.ru" data-community-url="https://community.leroymerlin.ru" data-three-d-house="/3d-proekt-obustroystva-doma-i-kvartiry/" data-send-shop-list-url="/_jcr_content/sendShopListToEmail/" data-apiorchestrator-apikey="VY0AKH3eBwhyGUjBM5U9rO4PyBvTG0cA" data-apiorchestrator-scheme="https" data-apiorchestrator-domain="api.leroymerlin.ru" data-bws-url-context="/aem_bws/v3" data-bws-enabled="true" data-acs-url-context="/aem_acs/v1" data-acs-enabled="true" data-shopping-list-url="/shopping-list/" data-recaptcha-site-key="6LevQqIUAAAAACbWSo4bVR4lLUEQPynxrnRXWS-I" data-shopping-list-ajax-href="/content/elbrus/moscow/ru/_jcr_content/shoppingList.model.json" data-products-href="/content/elbrus/moscow/ru/_jcr_content/product.json" data-homepath="/content/elbrus/moscow/ru" data-optimization-experiments="[]">
Раньше трековые светильники можно было увидеть только в выставочных залах и торговых центрах. Сегодня такие системы всё чаще выбирают для офисов, квартир и домов. Лаконичные прожекторы отлично вписываются в дизайнерские интерьеры в стиле лофт, минимализм и хай-тек. В статье мы рассматриваем правила сборки и подключения трековых конструкций.
Трековая система состоит из нескольких спотов или прожекторов, которые закреплены на шинопроводе. Шинопровод — модуль из алюминиевого сплава, внутри него расположены электрические контакты. Лампы можно двигать по шинопроводу и направлять в разные стороны.
Трековые системы отлично смотрятся в гостиных, кухнях и спальнях, подходят для освещения прихожих и коридоров.
Главные преимущества трековых светильников:
вариативность: можно залить светом всё помещение, а можно подсветить отдельные зоны или объекты;
систему легко смонтировать на любом потолке: обычном, навесном, натяжном или реечном;
конструкцию достаточно просто и быстро установить, а в дальнейшем — легко заменить любую деталь;
споты, прожекторы и шинопроводы нетребовательны в уходе;
вы можете собрать конструкции разных форм: разместить шинопроводы в прямую линию, сделать угол, квадрат или прямоугольник.
Выбираем светильники
В коллекции Леруа Мерлен представлены два типа трековых светильников: со встроенными светодиодами и со сменными лампами под цоколи E14, E27 и GU10.
Примеры трековых светильников из Леруа Мерлен:
Давайте определимся, сколько лампочек или светодиодных светильников разной мощности понадобится для освещения помещения.
Обратите внимание на яркость светового потока (лм), указанную на упаковке светодиодной лампы или готового светодиодного светильника. Для каждого типа помещения существуют свои нормы освещенности по СНиП. В среднем, это 150-200 лм на 1 м2 для жилых комнат и 200-300 лм/м2 для общественных.
Большинство трековых светильников дают направленный свет, угол рассеивания — менее 100°. Если вы планируете использовать трековую конструкцию в качестве основного освещения, берите на один светильник больше, чем получилось по расчётам.
Коротко о цене и о дизайне. Светильники, рассчитанные под лампу, обойдутся дешевле тех, что продаются со встроенными светодиодами. В каталоге Леруа Мерлен представлены чёрные и белые светильники.
Докупаем комплектующие
Как мы писали выше, трековый светильник состоит из шины и прожекторов/спотов. Помимо них для монтажа понадобятся дополнительные аксессуары: коннекторы, заглушки (помните: один коннектор и одна заглушка всегда идут в комплекте с шинопроводом), тросы (требуются, если вы планируете подвесить конструкцию). Рассмотрим, какие комплектующие для чего нужны.

Готовясь к ремонту в квартире, невольно задумываешься об использовании гипсокартона. С его помощью можно получить идеально ровные стены, сделать дополнительное утепление или сконструировать подвесной потолок. Подвесы для гипсокартона используются не только при создании подвесного потолка. Они также применяются при создании стены из ГКЛ. С их помощью каркас становится достаточно прочным, чтобы выдержать вес гипсокартонных листов и финишной отделки. В статье мастер сантехник расскажет, о подвесах для работы с гипсокартоном.
Зачем нужно использовать подвес

Крепление листов гипсокартона к созданному каркасу является нормой. Есть варианты, когда монтаж проводится без сборки каркаса, но они встречаются редко. Для создания ровной стены или потолка собирается специальная конструкция из металлопрофилей.

Подвесы используются для сборки каркаса в тех случаях, когда поверхность, которую необходимо зашить листами гипсокартона, имеет перепады высоты или прочие неровности. Подвесы позволяют создать надежное крепление профиля и направляющих для листов.

Функциональная нагрузка подвесов заключается не только в создании ровного покрытия, так же они улучшают звуко- и теплоизоляцию, придают поверхностям прочность и устойчивость, а также помогают в создании дизайна любой сложности.

Если ремонт планируется осуществлять самостоятельно, то необходимо следовать рекомендациям по выбору вида подвеса для определенных задач. Несоблюдение этих правил может привести к неприятным последствиям (например, прочность конструкции или ее геометрия может быть существенно нарушена). То же касается и работы нанятых мастеров: важно, чтобы они соблюдали эти правила.
Подвес для гипсокартонных листов (ГКЛ) традиционно изготавливается из оцинкованной стали, которая обладает прекрасными антикоррозионными свойствами, а значит, не боится влаги и перепадов температур и прослужит при условии правильного монтажа 5 и более лет. Следует знать, что чем больше толщина детали подвеса, тем большую нагрузку он способен выдержать.
Как и любой крепежный элемент, подвес продается в нескольких модификациях:
- Прямой;
- Виброподвесы;
- Анкерный;
- Скользящий подвес;
- Нониус;
- Краб.

Может использоваться для:
- Создания каркаса для последующей обшивки гипсокартоном потолка с неровной поверхностью;
- Сборки каркаса для облицовки стен или потолка;
- Предварительного выравнивания любой поверхности.
Прямой подвес легко крепится к бетонным, кирпичным и каменным поверхностям, поэтом может применяться в самых разнообразных помещениях.

Использование виброподвес требуется в тех случаях, когда нужна качественная звукоизоляция. Для подавления звуковых волн виброподвесы оснащаются специальным элементом, который должен гасить звуковые колебания. За счет использования дополнительного звукоизоляционного элемента виброподвес будет способен выдержать меньшую нагрузку, нежели обычный подвес для ГКЛ.

Нет смысла использовать только виброподвесы. Если уж был выбран такой крепеж, то также следует уложить звукоизоляционный материал между гипсокартоном и потолком.

Для большинства квартир нет нужды прибегать к такому крепежу, и используется он в редких случаях.

Иногда, в квартирах с высокими потолками, хочется сделать их ниже. Благодаря анкерному подвесу можно создать необходимое по размеру пространство над потолком, то есть можно регулировать высоту собираемой конструкции.

Он имеет простую схему установки:
- Сверлятся отверстия для анкера;
- Тяга фиксируется на потолке;
- Профиль вставляется в направляющие, а на тягу надевается сам подвес;
- В подвес вставляется профиль, после чего выполняется выравнивание конструкции и её фиксация в заданной позиции.
Считается, что этот крепеж способен выдерживать нагрузку до 25 кг, но через несколько лет пружинка может растягиваться и ослабнуть. Это является наибольшим недостатком крепежа. Также сама тяга подвеса для гипсокартона не относится к числу надежных элементов крепления


Нониус редко используется при работе с гипсокартоном, но его стоит упомянуть для полноты картины.

Он состоит из двух элементов, что соединяются специальными шурупами. Благодаря этому удается настраивать желаемую высоту нониуса.

Верхний элемент нониуса фиксируется на потолке, а к нижнему элементу крепят профиль.

Для соединения конструкций также используются крабы – особый крепеж для CD-конструкций. Он позволяет смонтировать прочный каркас в кратчайшие сроки.
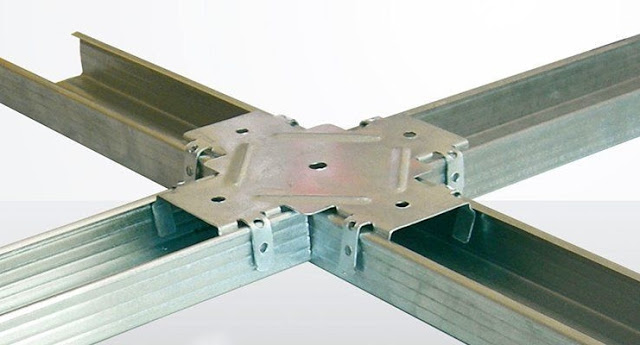
Крабы применяются не только для подвесных потолков, но и для создания металлического каркаса стен, которые в последствии обшиваются ГКЛ.

Эти крепления очень прочны и способны выдержать значительные нагрузки и не допустить деформацию.

Выбор подходящего вида подвеса напрямую зависит от его габаритов, а также от того, для каких целей он необходим. Прямые имеют размеры 12,5х6х3 см, поэтому если планируется грандиозная конструкция больших размеров со сложной геометрией, то с помощью этого вида крепежа вряд ли удастся достичь удовлетворительного результата. В таких ситуациях оправдано использовать подвесы с зажимом, длина которых составляет от 0,5 до 1 м.
Также могут быть использованы удлиненные подвесы, которые выпускают некоторые производители, либо есть возможность удлинить имеющийся подвес своими руками. Для этого один элемент прикручивается к другому при помощи болтов (обычно хватает двух).
На каком расстоянии ставить

Немаловажно рассчитать и количество необходимых подвесов. Эта величина напрямую зависит от нагрузки, которую он способен выдержать, с учетом того, что лист гипсокартона размерами 1200х2500 см имеет вес 22 кг.
Подвесы способны выдержать следующую нагрузку:
- Прямой – около 40 кг;
- Виброподвес – 56 кг (есть экземпляры, что могут выдерживать не более 12 кг);
- Анкерный – до 25 кг;
- Скользящий;
- Нониус – до 40 кг.
Таким образом, наибольшую нагрузку способен выдержать виброподвес, поэтому их понадобится меньше, а анкерных больше. Исходя из допустимой нагрузки можно понять, на каком расстоянии друг от друга можно располагать подвесы и сколько их понадобится.
Важно учитывать и рекомендации по расположению профилей и подвесов, а также допустимых отступов. Расстояние между профилями составляет 60 см, а отступ от стен – 30 см. Фронтальный отступ – до 1 м.

Чтобы монтаж конструкции для обшивки стен или потолка ГКЛ прошел максимально удобно и правильно, необходимо заранее подготовить все материалы и инструменты.

- Профили;
- Подвесы;
- Дюбель-шурупы; (семечки); ; ;
- Длинное правило (не менее 2 м);
- Веревка или шнур; .
Нет ничего сложно в том, чтобы понять, как правильно крепить подвесы для гипсокартона. В зависимости от их разновидности, устанавливают подвесы непосредственно до или после размещения профиля, который будет к ним крепиться.

Для начала нужно сделать разметку, чтобы обозначить все важные места, где будет производиться крепление. В стене или потолку сверлятся отверстия, куда вставляются дюбели и крепятся подвесы. После этого нужно подровнять профили и проверить, в одной ли плоскости они находятся. Далее можно фиксировать профиль саморезами.
Ремонт, сделанный своими руками, всегда доставляет больше радости и чувства удовлетворенности. При помощи гипсокартона создавать уникальный интерьер в помещениях стало проще. И подвесы в этом деле играют немаловажную роль. Их разнообразие позволит реализовать самые смелые фантазии в короткий срок.
В сюжете - Как крепить подвесы для профиля
В сюжете - Как удлинить подвесы
В сюжете - Зачем нужны виброподвесы и можно ли их сделать самому
В сюжете - Как надежно закрепить подвес в разное основание и самый простой способ выравнивания профилей в плоскость

Не редко перед нами встает задача повесить на стену что-нибудь, к примеру полки или картину, да хоть что. Но как правильно и быстро разметить отверстия под крепеж? Можно конечно вооружится рулеткой и замерять расстояние между крепежными отверстиями , а потом рисовать все это на стене.
Покажу вам все на своем примере. Повторить сможет абсолютно любой человек и понадобится самый обыкновенный инструмент.
Необходимый инвентарь для работы:
- сам объект, который необходимо повесить (полка, картина);
- малярный скотч;
- карандаш;
- рулетка;
- Перфоратор или шуруповерт
Разметка отверстий под крепеж
Есть у меня шесть вот таких вот полок

У каждой полки по два крепежных отверстия, то есть нужно разметить и просверлить 12 отверстий. Задача на первый взгляд трудно выполнимая, но это лишь на первый взгляд. Полки имеют вот такие вот места для крепления

Суть способа до безобразия проста, Понадобится лишь обыкновенный малярный скотч. Нужно использовать именно малярный скотч, простой скотч не допустим.

Следующим шагом наклеиваем скотч на места под крепеж

и карандашом отмечаем отверстия

Теперь лишь остается отодрать аккуратно скотч и переклеить его на стену. А затем засверлить отверстие под крепеж

А следующим шагом отрываем скотч и закрепляем крепежные винты. Повторюсь, скотч нужно использовать только малярный. Простой скотч отдерется только с обоями.
Теперь можно и повесить наши полочки

Вот так вот все просто и быстро!
Ребят вот видео, в котором вы можете увидеть еще несколько полезных советов для дома или дачи
Читайте также: