
Как сделать сервопривод тише
Обновлено: 03.07.2024
Судя по всему, проблема в наводках, создаваемых либо сервоприводами, либо общим питанием. При этом питание серв и логики платы разделено - сервы запитаны через UBEC 8A-12A, контроллер - через 5v 3A FPV Micro UBEC.
Вопрос: как можно победить дребезг? фильтрующая керамика 10мкф по питанию уже присутствует на SSC-32.
нужно отделить проблему управляющего сигнала от проблемы питания.
например запитать сервы группами (или вообще по одиночке) от разных источников.
или для исключения варианта кривой прошивки с неуспевающими прерываниями все сервы запитать одним управляющим сигналом и посмотреть на реакцию
На 10 мкФ по питанию можно не обращать внимания, не лишним будет дополнительно напаять хотя бы 4700 мкФ или больше.
Каждая серва может жрать 1 ампер, итого для 18 серв ubec на 8 ампер кажется слабоват, хотя если из него не идёт дым, то может и нормально.
На 10 мкФ по питанию можно не обращать внимания, не лишним будет дополнительно напаять хотя бы 4700 мкФ или больше.
Каждая серва может жрать 1 ампер, итого для 18 серв ubec на 8 ампер кажется слабоват, хотя если из него не идёт дым, то может и нормально.
странно то, что автор на сайте пишет значения 4-5А на все сервы, что даёт 0,277 на одну серву. и при этом всё работает. попробую найти БП 5В 24А и поставить доп.керамику 4,7 мФ, по результатам отпишусь.
посмотрел похожие проекты - люди объединяют сервы в группы по 6 шт и запитывают их от понижающих преобразователей 5В 3А, что даёт максимум 0,5А на одну серву. может, это у меня с понижайкой что-то не так?
нужно отделить проблему управляющего сигнала от проблемы питания.
например запитать сервы группами (или вообще по одиночке) от разных источников.
или для исключения варианта кривой прошивки с неуспевающими прерываниями все сервы запитать одним управляющим сигналом и посмотреть на реакцию

Не четыре целых и семь десятых, а четыре тысячи семьсот.
Электролитический, круглый, с ножками.
То что у него работает ещё ничего не значит, может тебе сервы попались некачественные, или понижайка плохая, для китайских запчастей это нормально.
Возможно дело в просадке напряжения под нагрузкой, тогда кондесатор должен помочь.
Была у меня такая проблема с сервами Mg-90.
Сервоконтроллер от Pololu на 24 сервы, подключено 8 серв, питание от 5В компьютерного ATX работающего компа и управление по Usb от этого же компа.
Попытка двинуть все 8 серв одновременно приводит к отключению сервоконтроллера от USB.
При этом компьютер работает нормально, не вырубается.
Помогло делать задержку по 10 миллисекунд после движения одной сервы. Потом 10мс после движения второй сервы. Итого 80мс общей задержки, но это не смертельно. Хотя у вас не своя управляющая программа, но может она там постоянно пытается двигать сервы.
Ну в общем не двигайте все сразу, а по одной и добавить задержку 10мс. Почему 10мс - опытным путем, 5мс мало было
Часовой пояс: UTC + 4 часа
Кто сейчас на конференции
Внешний вид Fritzing Условное обозначение на схеме
Сервопривод - это механизм с электромотором с управлением. Вы можете вращать механический привод на заданный угол с заданной скоростью или усилием.
Наиболее популярны сервоприводы, которые удерживают заданный угол и сервоприводы, поддерживающие заданную скорость вращения.
Сервоприводы имеют несколько составных частей. Привод — электромотор с редуктором. Зачастую скорость вращения мотора бывает слишком большой для практического использования. Для понижения скорости используется редуктор: механизм из шестерней, передающий и преобразующий крутящий момент.
Включая и выключая электромотор, можно вращать выходной вал — конечную шестерню сервопривода, к которой можно прикрепить нечто, чем мы хотим управлять - рычаг в форме круга, крестовины или перекладинки для передачи вращающего движения на рабочий орган. Для контроля положения используется датчик обратной связи — энкодер, который будет преобразовывать угол поворота обратно в электрический сигнал. Для этого часто используется потенциометр. При повороте бегунка потенциометра происходит изменение его сопротивления, пропорциональное углу поворота. Таким образом, с его помощью можно установить текущее положение механизма.
Кроме электромотора, редуктора и потенциометра в сервоприводе имеется электронная начинка, которая отвечает за приём внешнего параметра, считывание значений с потенциометра, их сравнение и включение/выключение мотора. Она-то и отвечает за поддержание отрицательной обратной связи.
К сервоприводу тянется три провода. Два из них отвечают за питание мотора и землю, третий доставляет управляющий сигнал, который используется для выставления положения устройства.

Крутящий момент и скорость поворота
Крутящий момент — векторная физическая величина, равная произведению радиус-вектора, проведённого от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело. Эта характеристика показывает, насколько тяжёлый груз сервопривод способен удержать в покое на рычаге заданной длины. Если крутящий момент сервопривода равен 5 кг×см, то это значит, что сервопривод удержит на весу в горизонтальном положении рычаг длины 1 см, на свободный конец которого подвесили 5 кг. Или, что эквивалентно, рычаг длины 5 см, к которому подвесили 1 кг.
Скорость сервопривода измеряется интервалом времени, который требуется рычагу сервопривода, чтобы повернуться на 60°. Характеристика 0,1 с/60° означает, что сервопривод поворачивается на 60° за 0,1 с. Из неё несложно вычислить скорость в более привычной величине, оборотах в минуту, но так сложилось, что при описании сервоприводов чаще всего используют такую единицу.
Иногда приходится искать компромисс между этими двумя характеристиками, так как если мы хотим надёжный, выдерживающий большой вес сервопривод, то мы должны быть готовы, что эта могучая установка будет медленно поворачиваться. А если мы хотим очень быстрый привод, то его будет относительно легко вывести из положения равновесия. При использовании одного и того же мотора баланс определяет конфигурация шестерней в редукторе.
Виды сервоприводов
Сервоприводы бывают аналоговые и цифровые. Различаются они лишь внутренней управляющей электроникой. Вместо специальной микросхемы аналогового сервопривода у цифрового собрата можно заметить на плате микропроцессор, который принимает импульсы, анализирует их и управляет мотором. Таким образом, в физическом исполнении отличие лишь в способе обработки импульсов и управлении мотором.
Шестерни для сервоприводов бывают из разных материалов: пластиковые, карбоновые, металлические.
Пластиковые, чаще всего нейлоновые, шестерни очень лёгкие, не подвержены износу, более всего распространены в сервоприводах. Они не выдерживают больших нагрузок, однако если нагрузки предполагаются небольшие, то нейлоновые шестерни — лучший выбор.
Карбоновые шестерни более долговечны, практически не изнашиваются, в несколько раз прочнее нейлоновых. Основной недостаток — дороговизна.
Металлические шестерни являются самыми тяжёлыми, однако они выдерживают максимальные нагрузки. Достаточно быстро изнашиваются, так что придётся менять шестерни практически каждый сезон. Шестерни из титана — фавориты среди металлических шестерней, причём как по техническим характеристикам, так и по цене. Они достаточно дорогие.
Существует три типа моторов сервоприводов: обычный мотор с сердечником, мотор без сердечника и бесколлекторный мотор.
Обычный мотор с сердечником (справа) обладает плотным железным ротором с проволочной обмоткой и магнитами вокруг него. Ротор имеет несколько секций, поэтому когда мотор вращается, ротор вызывает небольшие колебания мотора при прохождении секций мимо магнитов, а в результате получается сервопривод, который вибрирует и является менее точным, чем сервопривод с мотором без сердечника. Мотор с полым ротором (слева) обладает единым магнитным сердечником с обмоткой в форме цилиндра или колокола вокруг магнита. Конструкция без сердечника легче по весу и не имеет секций, что приводит к более быстрому отклику и ровной работе без вибраций. Такие моторы дороже, но они обеспечивают более высокий уровень контроля, вращающего момента и скорости по сравнения со стандартными.
Сервоприводы с бесколлекторным мотором появились сравнительно недавно. У бесколлекторных моторов нет щёток, а значит они не создают сопротивление вращению и не изнашиваются, скорость и момент выше при токопотреблении равном коллекторным моторам. Сервоприводы с бесколлекторным мотором — самые дорогие сервоприводы, однако при этом они обладают лучшими характеристиками по сравнению с сервоприводами с другими типами моторов.
Подключение к Arduino
Многие сервоприводы могут быть подключены к Arduino непосредственно. Для этого от них идёт шлейф из трёх проводов:
- красный — питание; подключается к контакту 3.3/5V или напрямую к источнику питания
- коричневый или чёрный — земля
- жёлтый или белый — сигнал; подключается к цифровому выходу Arduino

Обычный хобби-сервопривод во время работы потребляет более 100 мА. При этом Arduino способно выдавать до 500 мА. Поэтому, если вам в проекте необходимо использовать мощный сервопривод, есть смысл задуматься о выделении его в контур с дополнительным питанием.
На большинстве плат Arduino библиотека Servo поддерживает управление не более 12 сервоприводами, на Arduino Mega - 48. При этом есть небольшой побочный эффект использования этой библиотеки: если вы работаете не с Arduino Mega, то становится невозможным использовать функцию analogWrite() на 9 и 10 контактах независимо от того, подключены сервоприводы к этим контактам или нет. На Arduino Mega можно подключить до 12 сервоприводов без нарушения функционирования ШИМ/PWM, при использовании большего количества сервоприводов мы не сможем использовать analogWrite() на 11 и 12 контактах.
Библиотеки для управления сервоприводами (Servo) и для работы с приёмниками/ передатчиками на 433 МГц VirtualWire используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2.
Иногда при подключении серводвигателя не отрабатывают заданные команды или отрабатывают некорректно. Причина в том, что сервомоторы требуют достаточно большую мощность для питания, особенно в начале движения ротора. Эти резкие скачки потребляемой мощности могут сильно "просаживать" напряжение на Arduino. Может произойти даже перезагрузка платы. Если подобное происходит, вам надо добавить конденсатор (470 мкФ или больше) между рельсами GND и 5V на вашей макетке. Конденсатор выполняет роль своеобразного резервуара для электрического тока. Когда серводвигатель начинает работать, он получает остатки заряда с конденсатора и от источника питания Arduino одновременно. Длинная нога конденсатора - это позитивный контакт, она подключается к 5V. Отрицательный контакт часто маркируется символом '-'.
Управляем через импульсы
Для начала попробуем управлять вручную без библиотек. Считываем показания из Serial Monitor - нужно ввести число от 0 до 9. Эти значения равномерно распределим на 180 градусов и получим 20 градусов на каждую единицу показаний.
Библиотека Servo
Можно генерировать управляющие импульсы самостоятельно, но это настолько распространённая задача, что для её упрощения существует стандартная библиотека Servo.
Сервопривод постоянного вращения можно управлять с помощью библиотек Servo или Servo2. Отличие заключается в том, что функция Servo.write(angle) задаёт не угол, а скорость вращения привода.
Библиотека Servo позволяет осуществлять программное управление сервоприводами. Управление осуществляется следующими функциями:
- attach() — присоединяет объект к конкретному выводу платы. Возможны два варианта синтаксиса для этой функции: servo.attach(pin) и servo.attach(pin, min, max). При этом pin — номер пина, к которому присоединяют сервопривод, min и max — длины импульсов в микросекундах, отвечающих за углы поворота 0° и 180°. По умолчанию выставляются равными 544 мкс и 2400 мкс соответственно. Возвращаемого значения нет.
- write() — отдаёт команду сервоприводу принять некоторое значение параметра. Синтаксис: servo.write(angle), где angle — угол, на который должен повернуться сервопривод
- writeMicroseconds() — отдаёт команду послать на сервопривод имульс определённой длины, является низкоуровневым аналогом предыдущей команды. Синтаксис следующий: servo.writeMicroseconds(uS), где uS — длина импульса в микросекундах. Возвращаемого значения нет.
- read() — читает текущее значение угла, в котором находится сервопривод. Синтаксис: servo.read(), возвращается целое значение от 0 до 180
- attached() — проверка, была ли присоединён объект к конкретному пину. Синтаксис следующий: servo.attached(), возвращается логическая истина, если объект была присоединён к какому-либо пину, или ложь в обратном случае
- detach() — производит действие, обратное действию attach(), то есть отсоединяет объект от пина, к которому был приписан. Синтаксис: servo.detach()
В библиотеке Servo для Arduino по умолчанию выставлены следующие значения длин импульса: 544 мкс — для 0° и 2400 мкс — для 180°.
Пример подключения двух сервоприводов.
Библиотека Servo не совместима с библиотекой VirtualWire для работы с приёмником и передатчиком на 433 МГц, так как они используют одно и то же прерывание. Это означает, что их нельзя использовать в одном проекте одновременно. Существует альтернативная библиотека для управления сервомоторами — Servo2. Все методы библиотеки Servo2 совпадают с методами Servo.
При работе с сервоприводами на 360 градусов функции работают по другому.
| Функция Arduino | Сервопривод 180° | Сервопривод 360° |
|---|---|---|
| Servo.write(0) | Крайне левое положение | Полный ход в одном направлении |
| Servo.write(90) | Среднее положение | Остановка сервопривода |
| Servo.write(180) | Крайне правое положение | Полный ход в обратном направлении |
Sweep
Скетч File | Examples | Servo | Sweep постоянно поворачивает насадку на 180 градусов и возвращает её обратно. В примере используется встроенная библиотека Servo.
Общая схема - красный провод идёт к питанию 5V, чёрный или коричневый идёт к GND, а жёлтый или белый к выводу платы (в нашем примере вывод 9).

Скетч File | Examples | Servo | Knob управляет сервоприводом при помощи потенциометра. В примере используется встроенная библиотека Servo.
Общая схема: у сервопривода - красный провод идёт к питанию 5V, чёрный или коричневый идёт к GND, а жёлтый или белый к выводу платы (в нашем примере вывод 9). У потенциометра средняя ножка соединяется с аналоговым выходом A0, остальные к питанию и земле.

Случайные повороты
Будем поворачивать серводвигатель на случайную величину. Практического смысла немного, но для демонстрации подойдёт.
При достижении заданного градуса сервопривод останавливается и гудит, так как груз его немного тянет вперед или назад, вопрос как сделать чтоб серва при достижении заданного градуса останавливался на время? Например стать на 110 градусов, выключится, подождать 10мин, включится, стать на 140 градусов, выключится, подождать 10мин, включится, итд. Два дня себе голову ломаю.
[Pawn] Остановка на конечной точке, или остановка поворота при достижении заданного угла
Всем здравствуйте. У меня такой вопрос, реализация, по возможности более просто, остановка на.
Температура 22 градуса при старте системы!
При загрузки системы (я её с 5 раза смог запустить, Disk Read Error говорила) температура жесткого.
ОК, но как реализовать отключение питания от сервы? на данный момент я вижу только при помощи реле, может есть другой способ?
При достижении заданного градуса сервопривод останавливается и гудит, так как груз его немного тянет вперед или назад, вопрос как сделать чтоб серва при достижении заданного градуса останавливался на время?
как ты хочешь чтобы она остановилась? груз то ведь не даст ей стоять?
вот она и гудит, отрабатывает положение
у меня груз плюс минус уравновешен, но может немного отклонится и стать на свою позицию при этом серв гудит и пытается поставить под четко заданный градус
Как вариант, использовать электромагнитный тормоз.
Подали напряжение – тормоз отпустился, провернули ячейку, сняли напряжение с тормоза, отключили серву.
это инкубатор внутри которого стоит уравновешенная ячейка к которой прямым приводом подключен сервопривод и вертит ее как пропеллер то в зад то в перед
Я поставил серву и она у меня двигается в таких градусах начальное 110* потом 140* опять в 110* потом 80* и опять в 110*, полного оборота нет. Или я тебя как то не так понял?
это вас пока понять сложновато.
для поставленной задачи как вам указали - есть привода с тормозом.
включили привод - подали на тормоз напряжение - провернули на сколько надо - сняли напряжение с тормоза - выключили серво.
а дальше хоть "чичердык" танцуй этим приводом
Вобщем разобрался я помогло мне реле, но уперся в код, мне нужно поворачивать серву каждые два часа, а delay ругается что задал много времени, помогите с кодом пожалуйста.
Для наглядности изобразил на рисунке суть затеи, есть ящик в нем установлена ячейка которая поворачивается под действием сервопривода, ячейка примерно уравновешена ее можно вручную повернуть под любой градус и она с небольшим отклонением остановится(собственно почему и гудит сервопривод). Мне нужно чтоб ячейку вертел сервопривод каждые 2 часа, помогите пожалуйста, может у кого есть идеи, я просто еще нуб и уже очень устал над этим думать но хочу довести до ума и чемунибуть научится. Еще было бы не плохо замедлить движение сервы. Зарание благодарю!
delay отрабатывает доли секунды. Вам нужно десятки минут. Для этого нужно "внешнее" устройство - "Часы реального времени". Можно на год вперед запрограммировать.
Что бы замедлить движение сервы, то в Вашем случае лучше использовать редуктор. Убьете двух зайцев. И вращение медленнее и нагрузка на моторчик меньше. И гудеть перестанет и тормоз может не понадобится.

Как-то перед новым годом обратил внимание, что из под торпеды раздаётся странный клёкот.
Хаотичные отключение\включение режима "auto", "a/c" или смена температуры, как будто убирали проблему.
"Булькающий" звук намекал на нехватку какой-то жидкости.
Проверил антифриз — всё норме.
Поверял не по уровню в бачке, а, как меня научили на лексус-клабе, открутив крышку радиатора и убедившись, что антифриз не ушёл "из колена".

Чтобы снять крышку, нужно её повернуть до упора, потом надавить на центр и поворачивать дальше :) Ваш К.О.
Потом звук пропал и я не вспоминал о нём до тех пор, пока забортная температура не дошла до 25+.
Так жить нельзя! (с) — подумал я, в третий раз услышав клёкот под торпедой.
В общем и целом, в наших машинах нельзя задать температуру воздуха вылетающего из воздуховодов.
Климат всегда "сам" регулирует температуру воздуха в воздуховодах, а при включении режима "auto" дополнительно к этому начинает менять направление обдува и скорость работы вентилятора.
Все участвующие в этом процессе узлы и агрегаты можно увидеть на этой картинке:
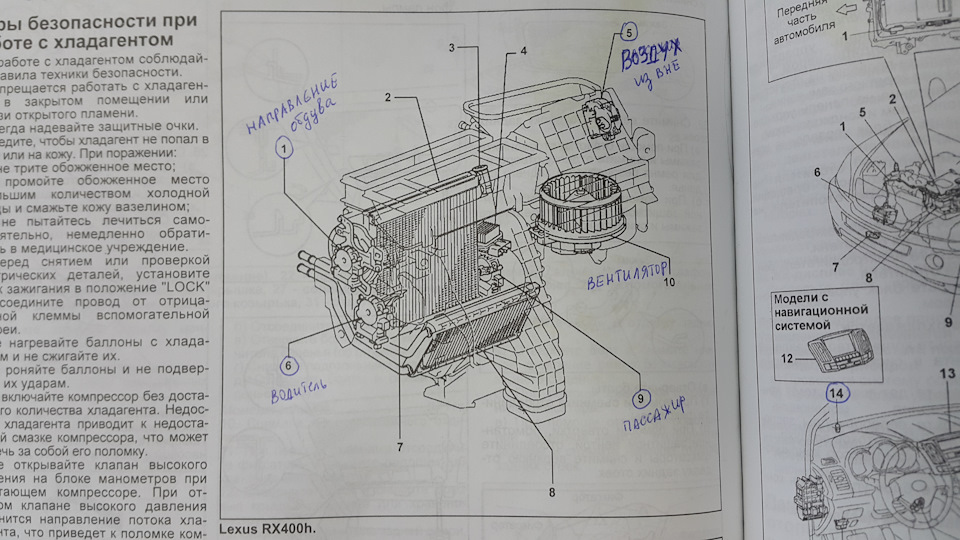
2. Сервопривод направления обдува (1) или SERVO SUB-ASSY, DAMPER(FOR MODE).
TOYOTA 87106-48070, 7600р.
Двигает заслонкой, которая выбирает куда дуть — в лицо, ноги, лицо-ноги или на лобовое(?).
3. Сервоприводы смешения воздуха (один для водителя (6), другой для пассажира (9)) или SERVO SUB-ASSY, DAMPER(FOR AIRMIX).
TOYOTA 87106-48150, 5000р и TOYOTA 87106-48160, 6500р.
Отвечают за выбор температуры воздуха поступающего из воздуховодов в салон.
4. Моторчик отопителя (вентилятор печки, 10) или MOTOR SUB-ASSY, COOLING UNIT, W/FAN.
TOYOTA 87103-48040, 16000р.
В отличии от сервоприводов, для которых не предлагается никаких аналогов, у моторчика отопителя он есть:
Sat ST-87103-48040 по демократичной цене в 3000р.
Чтобы определить какой из механизмов отдаёт копыта, нужно выключить режим "auto" и вручную проверить все режимы (рециркуляция, обдув, температура, скорость).
В ходе экспериментов выяснил, что у меня звук появляется при переключение режима обдува с "лицо" на "ноги" или "лицо-ноги". Значит виноват сервопривод заслонки направления обдува.
Чтобы окончательно в этом убедиться, залез под руль, благо разбирать для этого ничего не нужно:
Поскольку есть много отзывов о том, что сервоприводы легко лечатся, решил провести дефектовку.
Сервопривод держится на трёх винтах (их хорошо видно в начале видео).
Два из них (ближних к моторному отсеку), в принципе, можно выкрутить без снятия чего-либо ещё, если:
— максимально отодвинуть водительское кресло,
— просунуть правую руку под торпеду (вместе с ключом), одновременно ложась спиной на пол салона,
— и пропихнуть себя поближе к педалям газа и тормоза (не забыв перед этим расположить источник освещения около педали стояночного тормоза).
Но вот с третьим винтом такой фокус не пройдёт, т.к. он находится очень близко от воздуховода, что затрудняет обзор и не оставляет достаточно места для манёвров.
(Хотя, наличие биты с миниатюрным воротком 1-2см, вполне может решить эту проблему.)
А чтобы снять воздуховод, нужно снять всю нижнюю отделку торпеды со стороны водителя.
Отделка крепится на двух болтах и куче клипс:

Сначала снимаем отделку порога и сдвигаем уплотнитель двери, чтобы добраться до болта номер 1 (на 10 мм) и открутить его, а затем выкручиваем винт номер 2, спрятанный под декоративной крышкой.
Клипсы проще отщёлкивать начиная со стороны двери (3 — 4 — 5).
Затем отсоединяем все разъёмы и датчик температуры:
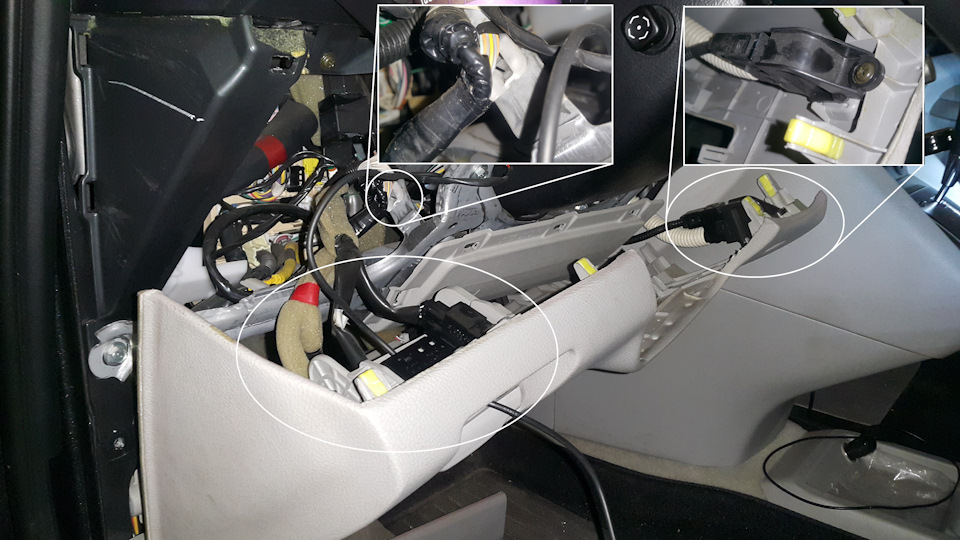
Снизу тоже есть разъёмы:

Следующий этап — снятие подушки безопасности. Она крепится на четырёх болтах (опять на 10 мм):

По-хорошему, подушку нужно не только открутить, но и отсоединить проводку (так будет больше свободного места). Однако, для этого нужно снимать минусовую клемму аккумулятора.
Мне этим заниматься не хотелось, поэтому я оставил её подключённой и просто отложил в сторону.
По поводу инструмента… Без маленькой трещотки под торпедой делать нечего.
Места для обычной отвёртки нет совсем.
Кто-то, правда, отписывался, что ему хватило гибкой насадки на отвёртку…

Итак, после снятия подушки открывается доступ к воздуховоду:

Откручиваем болт и снимаем воздуховод:

Теперь есть доступ к проблемному винту (сверху, справа):
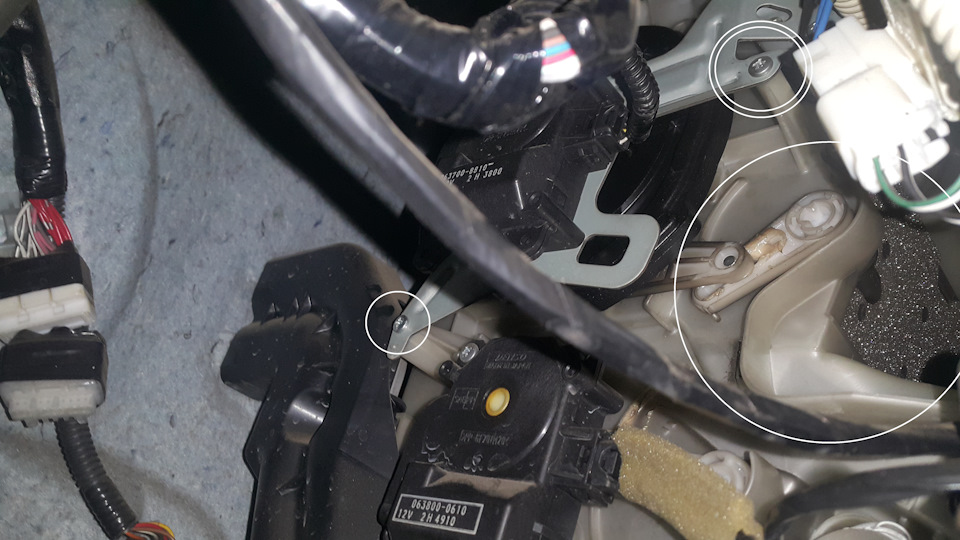
На фото: сверху — сервопривод направления обдува, снизу — сервопривод смешивания воздуха, справа — видна заслонка открывающие поток воздуха в ноги.
Процесс выкручивания этих винтов занял уйму времени.
Пришлось стать на колени перед машиной и вворачиваться под торпеду под самыми разными углами, чтобы найти более или менее удобное положение.
Основная беда в том, что даже для маленькой трещотки под торпедой мало места и каждый заход проворачивал винт на считанные градусы.
В конце концов, до меня дошло, что чуть ослабленные трещоткой болты хорошо откручиваются (или вкручиваются) при помощи головки увеличенного диаметра, с которой можно работать голыми руками:

Такая приспособа существенно экономит время и нервы.
Спустя какое-то время сервопривод был снят:


Корпус привода стягивается тремя винтами, головки которых "спрятаны" под платой с направляющими для тяг заслонок.
Поэтому плату нужно снять:
Чтобы снять плату, нужно вывести стопор из пазика и потянуть её вверх. Одновременно и с усилием. Я стопор благополучно сломал.

Корпус разбирается при помощи маленькой отвёртки (типа часовой). Главное не перестараться и не отломать все пластиковые защёлки (одну сломал :)).
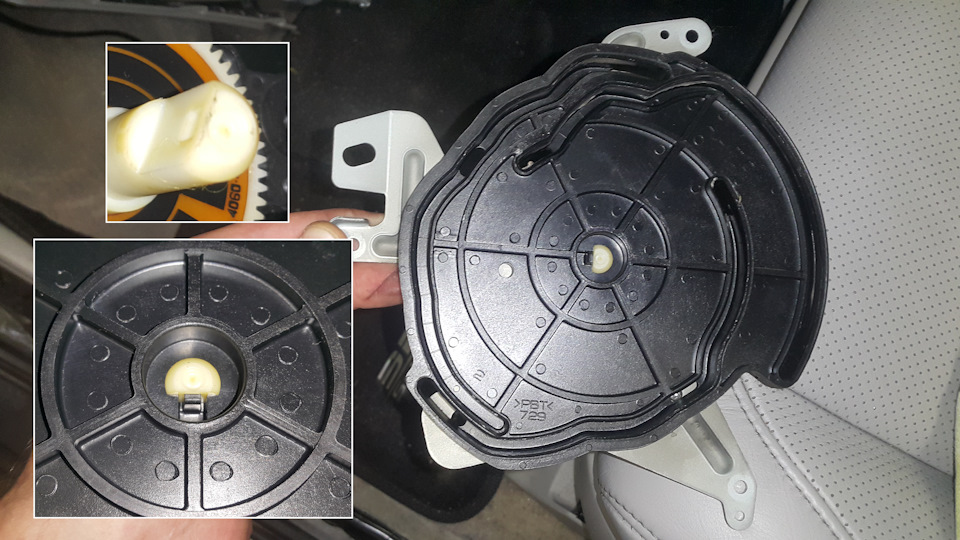
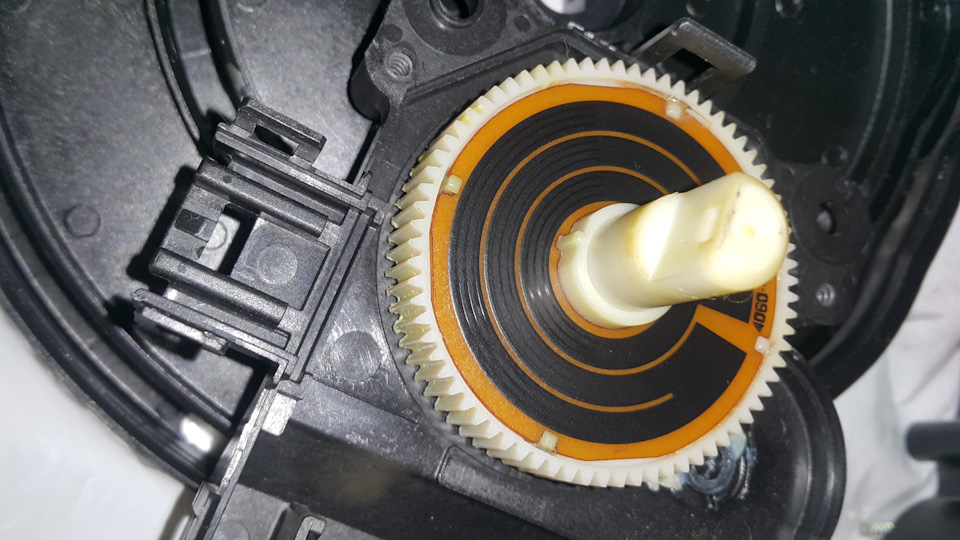
Все четыре сервопривода устроены одинаково.

Моторчик через червячную передачу и набор шестерёнок вращает рабочий вал.
На валу установлен диск с тремя "дорожками".
Внутренняя и средняя дорожки имеют практически нулевое сопротивление.
Внешняя изготовлена из другого материала и связывает первые две дорожки. Она имеет достаточно больше сопротивление — 5.6-5.8кОм.
К каждой дорожке подходит по скользящему контакту (смазка не токопроводящая). Два оставшихся контакта служат для питания моторчика.
Сопротивление между контактами идущими к внутренней и средней дорожке всегда постоянное (5.7кОм), а сопротивление между контактом идущим к внешней дорожке и любым другим линейно изменяется от нуля до максимального значения (или наоборот) в зависимости от угла поворота диска.
Основные причины выхода из строя сервоприводов хорошо известны:
1) Самая частая — стираются дорожки отвечающие за определение положения заслонки и в какой-то момент начинает пропадать контакт между дорожкой и медной пластиной. В этом случае заслонка не может найти себе место и двигается туда-сюда вокруг одной точки (тем самым ускоряя износ дорожек).
Популярные методы лечения:
— Отогнуть скользящий контакт, чтобы он сильнее прижимался к дорожке (в итоге, "живая" поверхность начинает стираться ещё быстрее).
— Подогнуть усики контакта чуть в сторону, чтобы они шли рядом с протёртостями на дорожке (если усики станут не параллельно дорожке, то "живая" поверхность опять пострадает).
— Залить усики оловом, чтобы контакт шёл по всей площади дорожки, а не только в трёх местах (чревато тем, что кусок припоя отлетит и заклинит шестерни).
2) Износ шестерёнок (а точнее, червяка и шестерни на которую он передаёт вращение). В этом случае заслонка в какой-то момент прекращает движение и раздаются звуки соскакивающих зубьев, скрежет.
Вероятная причина поломки заедание заслонки (н-р, из-за мусора в воздуховодах) или очень большой пробег машины (время).
Если посмотреть на одно фото выше ("внутренности сервопривода."), можно увидеть, что червяк на самом деле не туго насажен на ось моторчика и имеет свободный ход. Вращение на него передаётся через медный "стопор".
Когда люфт становится слишком большим (износ), "стопор" соскакивает с пазов и червяк перестаёт вращаться.
С износом борются подклеивая кусочек пластика в место обозначенное на фото стрелкой или заменой червяка на донорского (если хана пазикам).
Утверждается, что в качестве донора для шестерёнок подойдёт чуть ли не любой тойотовский сервопривод тех годов выпуска.
3) Выход из строя моторчика или окисление клемм питания моторчика. Ну, электричество оно такое…
Клеммы чистят, моторчик меняют на донорский.
У меня моторчик жужжал как надо, червяк люфтил в пределах нормы.
Выходит дело в износе дорожек.
Правда, тут возникает вопрос. Износ-то есть, и болтанка вокруг одной точки есть, но почему тогда при переводе заслонки из "лицо" в строго "в ноги" заслонка не проходила "мертвую" точку? (Как происходит с сервоприводом смешивания воздуха при изменении температуры.)
Я, кстати, не сразу обратил на это внимание, т.к. таким режимом никогда не пользовался.
Напрашивается два возможных варианта:
1. Контакт рвался так сильно, что "мозги" принимали решение, что мотор вышел за крайнее положение и возвращал его назад.
2. Клинила сама заслонка и моторчику не хватало сил, чтобы двигать её дальше.
Последний вариант более вероятен, т.к. сервопривод крутит сразу три заслонки, а тяги ходят по хитрым кривым на плате, смазка с которых давно ушла.
Ну и не забываем, что режим обдув в ноги вообще никогда не использовался — значит грязи могло нарасти достаточно на пути её следования.
Пошевелил заслонки руками. Вроде ходят, но на всякий случай поразрабатывал их с пристрастием )
Встал вопрос как быть дальше.
И тут я вспомнил, что в ветке по первому кузову, упоминалось, что дорожки на сервоприводе рециркуляции и обдува одинаковые (и отличаются от дорожек на приводе смешения воздуха).
Поскольку этот режим используется очень редко, то они должны быть в очень хорошем состоянии (значит их можно перекинуть на обдув), а т.к. в этом режиме только два положения (крайних), то и дефектные в средней части дорожки (снятые с обдува) должны отлично там поработать.
Читайте также: