
Как сделать простейшего вибро робота своими руками
Обновлено: 08.07.2024

Необходимые материалы
- 2 куска провода
- 1 моторчик
- 1 батарейка AA
- 3 канцелярские кнопки
- 2 кусочка пенокартона или похожего по свойствам материала
- 2-3 головки старых зубных щеток или несколько скрепок

1. Прикрепляем батарейку к мотору
С помощью клеящего пистолета прикрепляем кусочек пенокартона к корпусу мотора. Затем к приклеиваем к нему батарейку.


2. Дестабилизатор
Этот шаг может показаться не совсем понятным. Однако, чтобы сделать робота, необходимо заставить его двигаться. Надеваем на ось мотора маленький продолговатый кусочек пенокартона и закрепляем его с помощью клеевого пистолета. Такая конструкция придаст мотору дисбаланс, что и приведет всего робота в движение.

На самый конец дестабилизатора капните пару капель клея, или прикрепите какой-нибудь декоративный элемент — это добавит нашему творению индивидуальности и увеличит амплитуду его движений.

3. Ноги
Теперь необходимо снабдить робота нижними конечностями. Если вы будете использовать для этого головки зубных щеток, то приклейте их к нижней части мотора. В качестве прослойки можно использовать всё тот же пенокартон.




4. Провода
Следующим шагом прикрепим два наших отрезка провода к контактам моторчика. Можно их просто прикрутить, но ещё лучше будет припаять их, это сделает робота более долговечным.

5. Подключение батарейки
Используя термопистолет, приклеем провод к одному из концов батареи. Можете выбрать любой из двух проводов и любую сторону батареи — полярность в данном случае роли не играет. Если у вас хорошо получается паять, в этом шаге также можно воспользоваться пайкой вместо клея.


6. Глаза
В качестве глаз робота вполне подойдет пара бусинок, которые прикрепляем термоклеем к одному из концов батарейки. На этом шаге можно проявить фантазию и придумать внешний вид глаз на своё усмотрение.

7. Запуск
Теперь давайте оживим нашу самоделку. Возьмите свободный конец провода и прикрепите его с незанятому контакту батареи с помощью липкой ленты. Не стоит использовать на этом шаге термоклей, потому что это не позволит вам при необходимости отключить мотор.


А вот как может выглядеть наш самодельный робот, если проявить больше фантазии:
Хочу показать вам, мою коллекцию самых простейших роботов - виброботов.
Вибробот - это самый простой вид роботов который передвигается за счет вибрации. Самый простой способ сделать такого робота это взять зубную щетку отрезать от нее ручку, а на головку прилепить вибро моторчик и маленькую батарейку. Под дейтвием вибрации ворсинки начинают колебаться и "робот" движется.
Но быстро надоедает смотреть на кусок зубной щетки и хочется чего-то более интересного. Т.к. у меня есть 3д принтер я решил не ограничивать себя и сделал несколько таких виброботов на нем.
Первый - робот таракан

Второй - робот улитка "Vibro snail"

Третий - вибро жук

Если кто-то захочет повторить, с радостью поделюсь модельками!
P.S. Спасибо за внимание:)
Но это же не правильные вибраторы карл!

делайте сразу дилдороботов

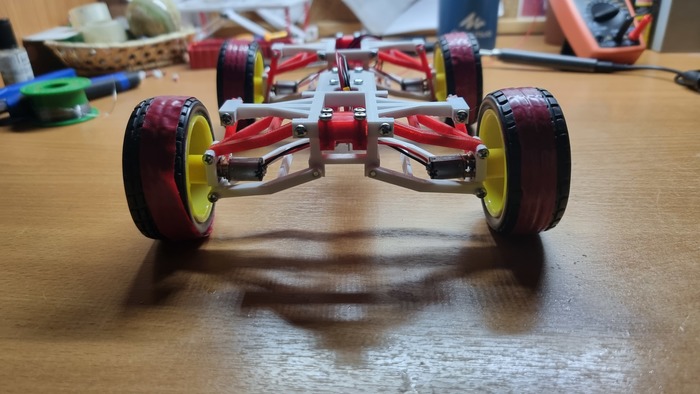
Радиоуправляемая полноприводная платформа, с намеком на подвеску. Или коротко о скуке инженера, часть 2
Так, продолжаем разговор. Сегодня надо наконец собрать до кучи эту кучу пластика, и разобраться с электроникой, попутно вызвав не более трех демонов.
Напишу здесь, так как под первой частью было много недопониманий. Я не строю болид для ралли Париж-Дакар. И не для каких бы то ни было еще соревнований. И вообще ни для чего. Я инженер, но не сказать что лучший, или даже хороший. Это просто развлечение на свободное время, в стиле "а что будет, если попробовать?". Единственная цель сего мероприятия - убить время, дальнейшая судьба проекта - разбор на запчасти (возможно, с использованием молотка, для обретения душевного спокойствия) с последующей утилизацией.
Первым делом, надо разобрать все то, что так тщательно собирали в прошлый раз. Ну ладно, почти все.

Больше винтиков богу винтиков!
Но черт возьми, как же я замаялся крутить эти чертовы 68 винтов. Да, можно было бы сделать и поменьше. Хотя я плохо представляю как.
Так как наша цель - подрамники, значит, придется скидывать рычаги, значит откроется отличный доступ к моторам.
Воспользуемся советом из комментариев, и поменяем провода питания. Я как раз нашел оригинальные от этих моторов, совершенно случайно.

Паяем провода, да покрепче, с обратной стороны зачищаем и обжимаем клеммы ншви. Просто потому что я так хочу, и никто мне не запретит. И так удобнее.
Повторяем четыре раза, затем долго и упорно закручиваем все обратно, пару раз забываем сначала собрать, а потом прикрутить амортизаторы, путем лево с право и в итоге получаем результат как в конце прошлой части, только лучше.


Едем дальше. Еще на моменте моделирования, я заложил по середине рамы монтажные отверстия, подразумевая что потом на них встанет ну хоть какое то подобие кузова, или подрамник для электроники. Получилось ни то, ни другое, просто белая пластинка с отверстиями, на глаз подогнанная под размеры будущих "мозгов".
Итак. Давайте теперь поговорим про управляющую электронику. Сейчас просьба всем хоть чуть чуть шарящим и понимающим, а так же особо чувствительным, закрыть нафиг этот пост. Я предупредил.
Чем мы можем заставить какую либо робототехническую платформу нас слушаться? Есть пара тройка вариантов. Первый, это одолжить у друга специальную аппаратуру для управления моделями, типа такой:

В теории все просто, минимум геморроя, главное все правильно подключить - и вуаля, у нас есть детская машинка на радиоуправлении. Но. Эта штука стоит денег. Для кого больших, для кого не очень, но все же стоит. У меня ее нет, покупать не хочу, а тот самый друг уже пол года как отдает долг родине. Поэтому не вариант, для нас.
Следующий вариант - экзотически-извращенский, я бы сказал. Купить в магазине самую простую машинку на радиоуправлении, распотрошить, и вставить потраха в наше поделие. Объяснять, почему так себе идея, надеюсь не надо.
И вот, самый популярный, распространенный, и многими (в том числе и мной) любимый способ - Ардуино.
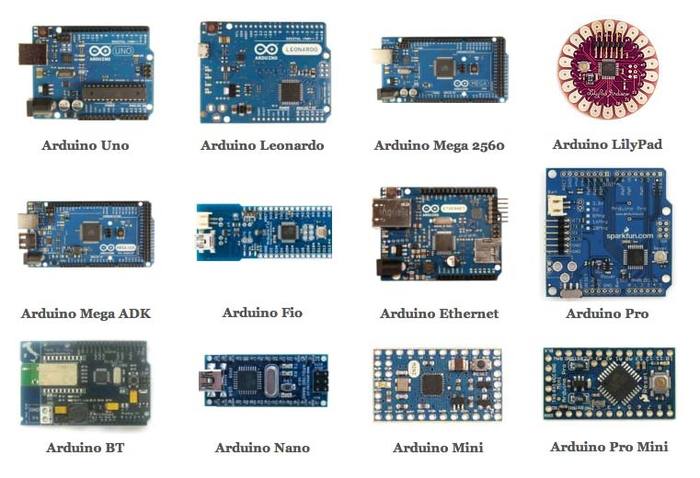
Имеем туево кукуево вариантов плат, модулей, форм факторов и тд. Даже языки программирования разные, и тут пожалуйста! И вот совпадение, у меня есть парочка.
Дальше есть два пути. Первый - обвешать модель всякими разномастными датчиками, поломать голову над кодом, и заставить все это безобразие кататься автономно, по какой нибудь черной линии, или от стенки до стенки, с помощью датчиков расстояния, или еще как. Вариантов куча. Но мне как то не интересно.
Второй путь - дистанционное управление. Можно заставить платформу кататься, подчиняясь команда с пульта телевизора, при помощи ик-приемника. Можно заморочиться с радиоканалом, и привязать к ней какой нибудь пульт от другой модели, или специально купленный на али. Можно вообще подцепить ее к домашнему роутеру, и рулить через веб интерфейс с компа. Но мы пойдем путем попроще. Или не проще, просто тем, адептом которого являюсь я. Старый добрый Bluetooth. Скачиваем на мобилку какое н будь приложение для управления машинками, я пользуюсь этим уже давно, и меня все устраивает.
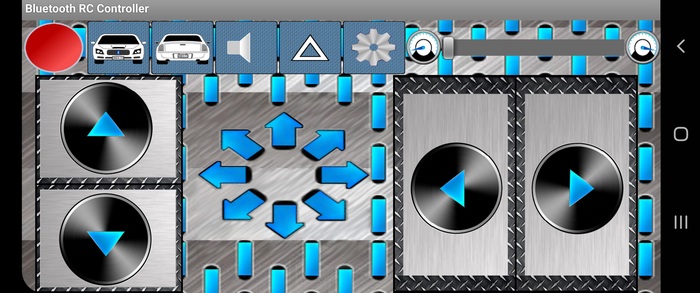
Открываем список команд, изобретаем код на 400 строчек, заливаем в нашу ардуйню, катаемся. Теперь непосредственно по железу.
Я пользую версию Arduino Leonardo от одной московской фирмы.

Уж не знаю что там по качеству, меня пока все устраивает, особенно улучшенная силовая часть, по сравнению с оригиналом. Сама по себе платка не потянет управление моторами, тупо сгорит. У все той же московской фирмы есть двухканальный драйвер моторов.
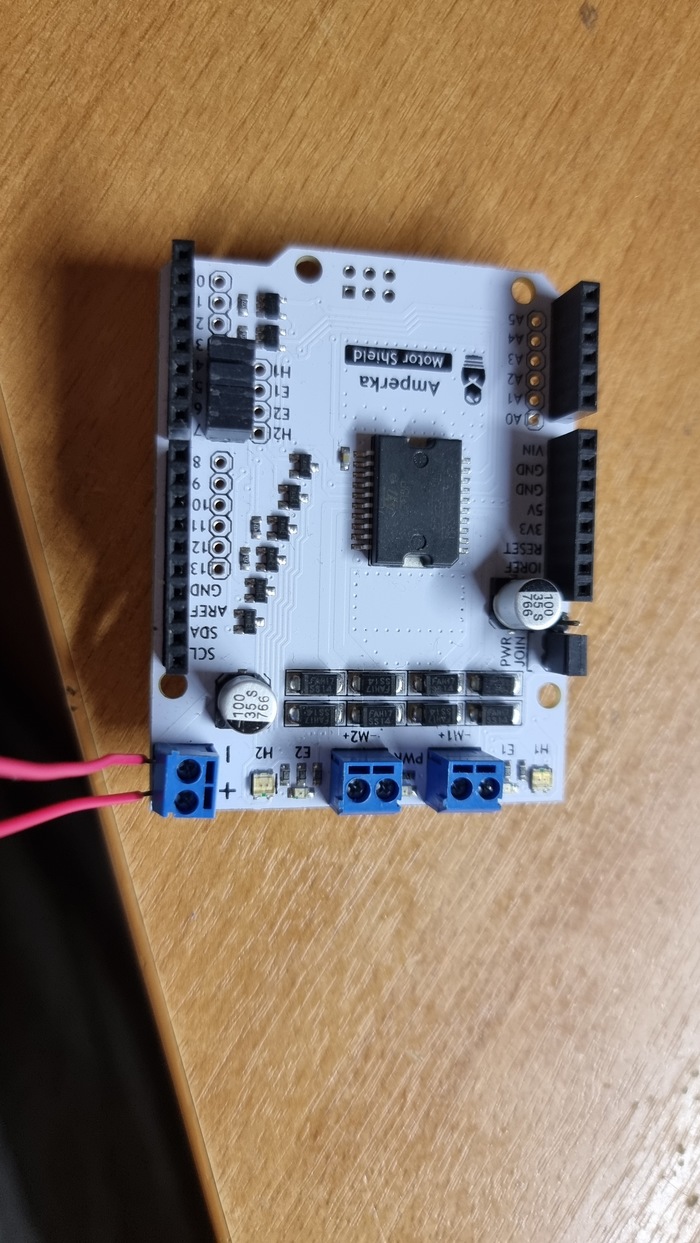
Она же позволит осуществить внешние питание всего и вся в нашей сборке.
А так же, для удобство монтажа всякой навесухи, да и вообще, докидываем плату расширения.
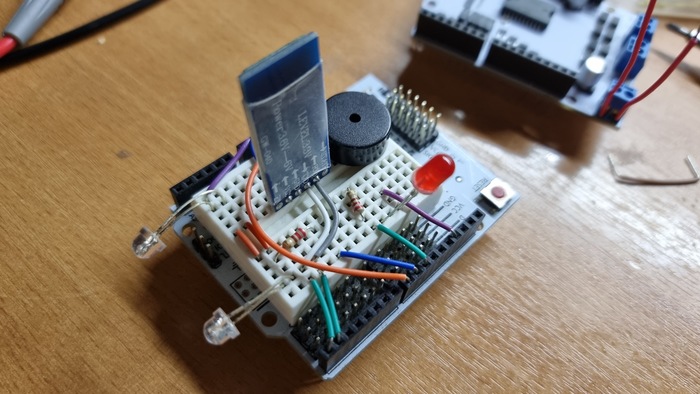
Из дополнительно прилепленного - пара светодиодных фар в стиле "улитка наркоман", красная лампочка, чтобы судорожно моргать в случае проблем, зуммер, чтобы делать бип бип, и модуль Bluetooth hc-06.
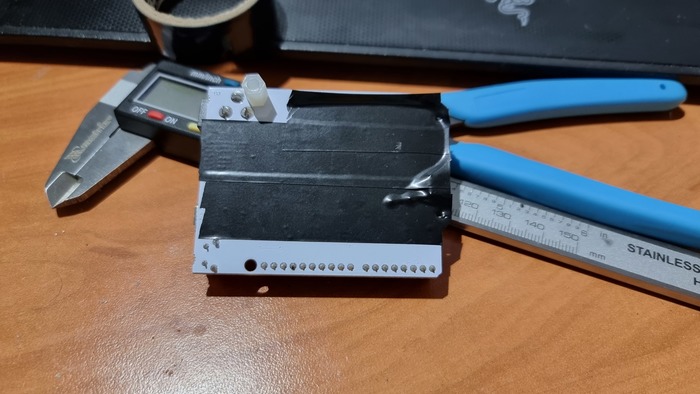
на всякий случай проклеим низ первой платы изолентой, все таки контакт с шестью металлическими винтами, мало ли.
Все это дело собирается "бутербродом" друг на друга, поэтому сначала закрепляем основную плату на раме, затем на нее драйвер моторов и тд.
Драйвер у нас двухканальный, а мотора четыре. Ну ничего, просто объединяем по два на канал, все равно при танковой схеме разницы нет. По идее так делать нельзя, но кто мне запретит. Да и нагрузки я проверил, должно выдержать. Должно.
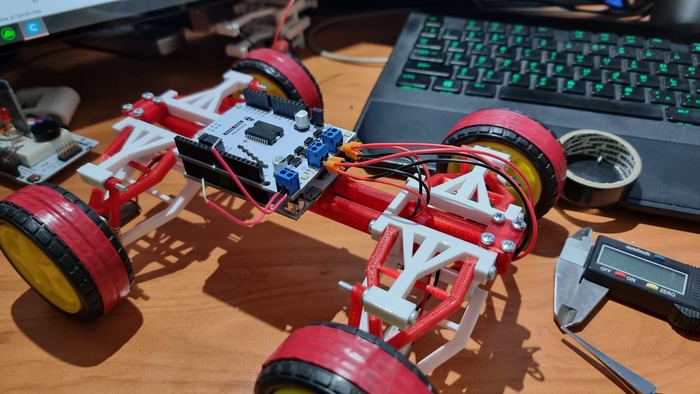
В общем, собираем, распутываем паутину проводов, находим косяк с креплением аккумуляторов (ну подумаешь, забыл, из нее де не стрелять. ) и в итоге получаем вот такое чудо юдо:

Иии. Да. Оно работает. Даже ездит. И даже по искусственному рельефу из коробок прыгает, и подвеска вроде как отрабатывает, но. Оно не работает) Точнее работает, но с кучей очень больших но. И это все мои ошибки. Просчеты, неучеты, нехватка опыта. Бегло пройдемся по ним:
- крепление аккумулятора, его просто нет. Надо удлинять раму, чтобы раздвинуть подрамники и закрепить его за блоком электроники, чтобы не мешался, и центр тяжести был ниже.
- я где то накосячил, не то в моделировании, не то в печати деталей, но в итоге что то не то с длиной рычагов подвески, и в итоге у нас получается отрицательный угол схождения колес, из за чего большая нагрузка на приводящие валы. Нужны новые рычаги.
- на хорошем рельефе начинают разбалтываться моторы, возможно из за проблемы выше, но все таки я пришел к выводу, что нужны крепления.
- нужны другие колеса, вероятно печатные. Эти слишком тяжелые, и нет возможности нормально закрепиться на валу.
- телескопы подвески работают, но явно как то не так. Надо либо поколдовать с их длиной, но скорее всего проблема в так себе качестве поверхности для трущихся деталей, видимо надо печатать в плюс, и шлифовать.
Из очевидных проблем это вроде пока все. Не знаю, буду ли я это исправлять, или сверну проект. Зависит от настроения. Так же не знаю, буду ли выкладывать сюда дальнейшую судьбу этого поделия, посмотрим на вашу реакцию. Ну а пока мы встаем на импровизированный пит-стоп)
Мальчиков трудно увлечь творчеством. Они ни за что не согласятся вырезать цветочки из бумаги и делать из них аппликации. Но если эта поделка – робот, то тут уж вы сынишку не оттащите от стола, ведь он так увлечется работой, что будет предлагать разные новые варианты.
Робот из картонных коробок
Если не выбрасывать картонные коробки, а собрать их в достаточном количестве, то можно подбросить ребенку идею сделать чудного робота своими руками. Для работы приготовьте такие материалы:
- три коробки из картона разных размеров;
- фигурную упаковку от какой-нибудь запчасти;
- две круглые формы для кексов из фольги;
- синельную проволоку;
- два картонных рулона от пищевой фольги;
- две основы от новогодней хлопушки;
- две бобины от скотча;
- два CD-диска.

Приступаем к сборке нового изделия. Прежде всего, коробки следует вывернуть наизнанку, чтобы убрать с глаз долой различные надписи. Можете не выворачивать, но тогда придется обклеить коробки цветной бумагой или фольгой. Самую маленькую коробку – голову – соединяем с самой большой – туловищем при помощи бобины от скотча – шеи. Можно воспользоваться клеем, а можно работать двусторонним скотчем.

Теперь приделываем роботу штанишки – к туловищу приклеиваем коробку средних размеров.
Руки – рулоны от пищевой фольги – и ноги – основы от новогодних хлопушек – привязываем веревками. Посередине на грудь приклеиваем для объемности фигурную упаковку, а штанишки украшаем двумя дисками.

На лицевой стороне головы прорезаем два круга и вставляем в отверстия формы для кексов – это наши глаза. Рот и сигнальные антенны на макушке делаем из закрученной проволоки.

Оставшуюся бобину из-под скотча разрезаем пополам и приклеиваем по бокам головы – это уши нашей игрушки.
Конструкция получится не очень устойчивая, так что можно обуть робота в детские сапожки или ботиночки.

Если малышу захочется, он может украсить своего нового друга аппликацией и даже на следующий день отнести в детский сад, чтобы похвастаться перед одногодками.

Новогодний костюм
Если коробки у вас большие, можно из них сделать маскарадный костюм для ребенка. В этом случае коробку-голову сразу приклеить к коробке-туловищу. На голове вырезать квадратное отверстие, чтобы малыш мог смотреть через него.

Внутри сделать прорезь для головы сынишки. А руки и ножки роботу смастерить из гибких вентиляционных труб, выбрав нужный диаметр.

Робот из пластиковых бутылок
Делать робота можно и из самого простого материала – пластиковых бутылок. Для поделки приготовьте:
- непрозрачную бутылку из-под колы;
- игрушечное ведерко из набора детской посуды;
- две вилки;
- три крышечки от пластиковых бутылок;
- два колеса от игрушечного автомобиля, соединенные шасси.

Снизу по бокам бутылки проделываем два отверстия, в которые продеваем шасси и прикручиваем колесики. Сгибаем две вилки – это руки – и крепим к туловищу сзади на болты. На голову надеваем ведерко, к которому прикрепляем две крышечки побольше – это глаза, и одну поменьше посередине – это рот. Украшаем робота, как подскажет фантазия.

Из бутылок и скотча
Если предыдущая конструкция показалась вам слишком сложной в изготовлении, можете обойтись методикой попроще. Три 1,5-литровых пластиковых бутылки стяните скотчем, не снимая пробок – это тело робота. К каждой крайней бутылке пробкой к пробке скотчем присоедините еще по одно такой же бутылке – получились ноги.

Разрежьте следующую бутылку пополам, и ту половинку, которая без пробки, примотайте скотчем в средней бутылке – это голова. Голову украсьте двумя пробками – глазами.

Руки можно сделать из поллитровых бутылок, нарезав их сегментами и соединив между собой.
Еще из двух бутылок вырежьте ладони и присоедините их к рукам. Поделка готова!

Робот из крышечек
Довольно интересным получится робот из пластиковых крышечек. Благодаря резинке, скрепляющей все элементы, у него будут двигаться руки и ноги. Предлагаем подробный мастер-класс изготовления трансформера из 22 крышечек:
- Для каждой ноги понадобится по 4 крышечки. В первых двух делаем отверстие горячим шилом посередине, в третьей – в донышке, но ближе к краю, а в четвертой проделываем сразу два отверстия – в центре и сбоку.
- В резинку с одной стороны вдеваем иголку, а с другой затягиваем плотный узел.
- Продеваем две крышки с центральным отверстием, затем идет крышка со сдвинутым центром и крышка с дырой в боковине. Завязываем резинку на узел.
- По этой же схеме собираем вторую ногу.
- Для изготовления руки проделываем в трех крышечках отверстия по центру, а в четвертой – сбоку.
- Вначале протягиваем иголку с резинкой в крышечку с боковым отверстием, затем поочередно – с центральными. Затягиваем резинку на узелок.
- Для головы нам понадобится одна крышечка и один колпачок от тюбика из-под зубной пасты. Для туловища – пять крышечек. В двух из них делаем отверстия по центру, в двух других – по два симметричных отверстия по бокам, а в пятой – сразу три отверстия по центру и по бокам.
- Стягиваем резинкой крышечку-голову, колпачок от зубной пасты и крышечку с тремя отверстиями. За ними идет крышечка с двумя отверстиями и крышечка с одни отверстием. Две оставшиеся крышечки – плечи – продеваем резинкой в боковые отверстия на туловище.
- В крайних крышечках рук проделываем по одному боковому отверстию. Пропускаем резинку сквозь него, затем через плечо и крышечку с тремя отверстиями. Далее – вторая крышка плеча и крайняя крышка второй руки.
- Через боковое отверстие в ноге пропускаем резинку, далее она проходит сквозь боковые отверстия нижней крышечки туловища, сквозь боковое отверстие во второй ноге и стягивается.
В принципе, наш робот-трансформер готов. Осталось только добавить ему глаза. Можно сделать отверстия в крышечке-голове, аппликацию или приделать их из пластилина. Роботу понадобится гранатомет. Для этого прекрасно подойдет колпачок от шариковой ручки. Его можно прикрепить к руке, поместить за спину или поставить на плечо.

Робот из консервных банок
Красивый робот получается из консервных банок. Нужно вставить одну банку в другую. Руки и ноги сделать из металлических крышечек, которыми закрываются стеклянные поллитровые бутылки с напитками. Просверлив в центре каждой крышечки отверстие, их нужно стянуть между собой на проволоку, закрепив концы. Спереди на корпус робота прикрутить болтами две такие же крышечки.

На верхней банке вырезать отверстие – рот, прикрутить два болта – глаза. А уши сделать из кругов из фольги, закрепив их по бокам так, чтобы они торчали в разные стороны.

Не забудьте сделать фото вашей работы поэтапно и выложите на свою страничку в соцсеть. Пусть посетители позавидуют вашим умениям, а, может, даже переймут неординарный опыт.
Вибромотор, это, по сути, неверно сбалансированный мотор. Другими словами, нагрузка прикреплена к валу двигателя не центром, что заставляет двигатель колебаться. Количество колебаний может быть изменено путем изменения веса нагрузки, расстояния от начала вала до нагрузки и скорости вращения двигателя.
Вибромотор может быть установлен на любой предмет, что заставит этот предмет вибрировать и двигаться из-за вибрации. Это быстрый и примитивный способ заставить двигаться простой робот.
Вибромоторы можно найти в сотовых телефонах, пейджерах, игровых джойстиках и массажерах.
Если этого у вас нет, то вибромотор можно легко создать самостоятельно путем присоединяя любой несбалансированной нагрузки на вал любого двигателя. Также вибромотор можно сделать, разделив сбалансированную нагрузку на валу на две части.
Ниже есть несколько простых примеров.

Где взять готовый вибромотор?

Главным источником вибромоторов являются игровые джойстики с "отдачей".
Просто разберите джойстик и извлеките мотор. Он готов к использованию.



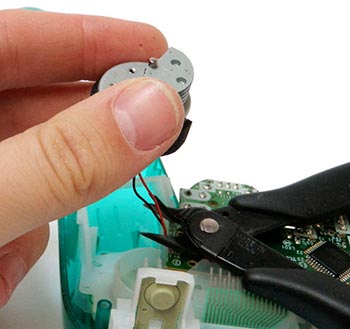
Разбалансировка вентилятора

Быстрый и примитивный способ изготовления вибромотора это взять компьютерный куллер и отломать половину лопастей плоскогубцами. Это разбалансирует вентилятор и заставит его вибрировать.


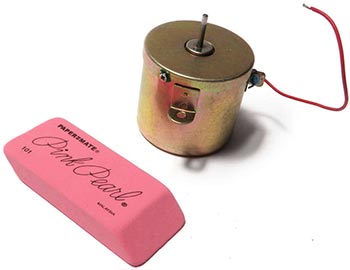
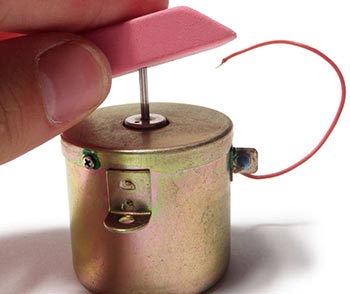
Добавление ластика

Еще один простой способ сделать вибромотор, это прикрепить ластик или кусок пробки на вал любого двигателя постоянного тока.
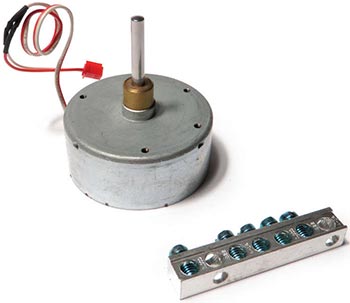
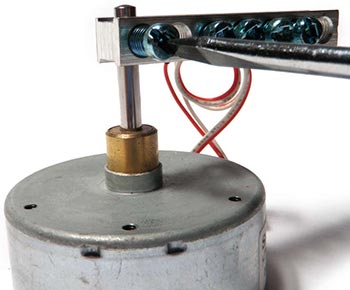
Установка клеммной колодки
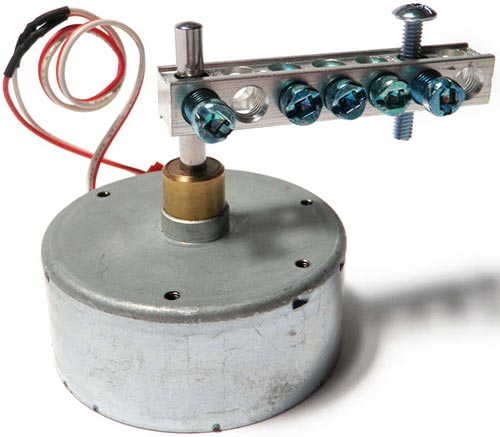
Также можно сделать вибромотор, прикрепив клеммную колодку на вал любого двигателя постоянного тока. Клеммная колодка сама по себе достаточно тяжелая для того, чтобы заставить двигатель вибрировать, но вы можете поэкспериментировать, зажимая в клеммную колодку мелкие предметы вроде шурупов.

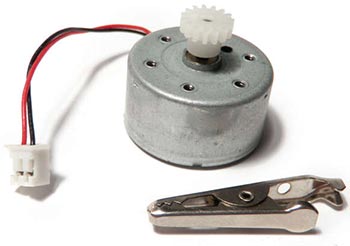
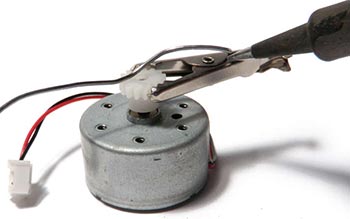
Добавление крокодильчика
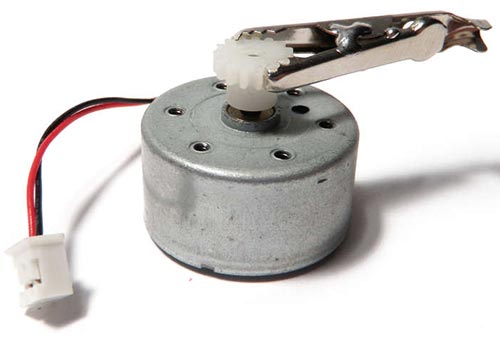
Также вибромотор можно получить, добавив к двигателю крокодильчик. Найдите двигатель с пластиковой шестеренкой на валу. Посадите крокодильчик на эту шестеренку и спаяйте две части крокодильчика для того, чтобы он не соскочил.
none Опубликована: 2012 г. 0 0

Вознаградить Я собрал 0 0
Читайте также: