
Как сделать линеаризацию функции
Обновлено: 06.07.2024
Метод гармонической линеаризации широко используется для анализа нелинейных систем [1]. Этот метод используется для определения условий возникновения автоколебаний в системах второго и более высокого порядка. При гармонической линеаризации должны выполняться два следующих условия. Замкнутая линейная система должна состоять из двух частей ─ линейной и нелинейной. Линейная часть должна обладать хорошими фильтрующими свойствами для высших гармоник[2]. Системы автоматического управления и регулирования содержат исполнительные механизмы, содержащие нелинейные элементы, поэтому их анализ является весьма актуальной проблемой.
Основной алгоритм
Пусть на вход нелинейного элемента поступает гармонический сигнал , где Преобразовав выходной сигнал в ряд Фурье только для первой гармоники. Получим:
С учётом (1),(2) общее уравнение нелинейного элемента можно представить в виде[3]:
Постановка задачи
Будем сравнивать два нелинейных элемента приведённых на рис.1,2, с целью выяснить стабильность амплитуды.

Используя (1), пока только для действительной части, получим:

Аналогично используя (1), пока только для действительной части, получим:
Реализация (4),(5) на Python
Результат (да в jpeg, но это график!)
Кстати интегрирование при помощи import scipy.integrate as spint осуществляться стабильно и без ошибок.
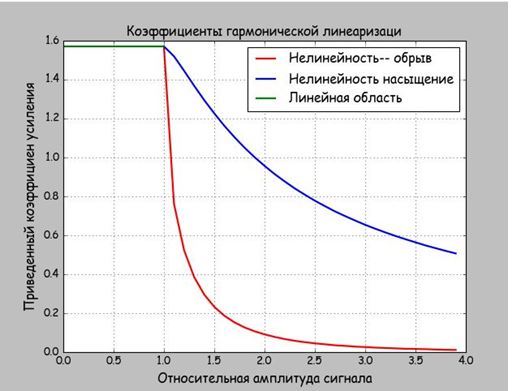
Из графика с полной очевидностью следует, что нелинейный элемент, приведенный на рис.2, при условии фильтрации высших гармоник обеспечит большую стабильность амплитуды, чем приведённый на рис.1. Более детальный анализ покажет и меньший процент гармоник, но это тема другой статьи.
Вариант сокращения кода программы
Можно использовать символьные вычисления, например, так:
Получим:-sin(asinh(m))*cos(asinh(m)) + asinh(m)
2*m*cos(asinh(m)) — sin(asinh(m))*cos(asinh(m)) + asinh(m)
Программное упрощение (simplify(z)) ничего не даёт, поэтому используем соотношения: , получим:
Вводим отношение амплитуды к порогу ограничения и окончательно получим:

Соотношение (6) решение уравнения (5), система (7) решение уравнения (4).
Выводы
В статье рассмотрена методика сравнительного анализа нелинейных элементов методом гармонической линеаризации.
Линеаразиция - один из наиболее распространенных методов анализа нелинейных систем. Идея линеаризации - использование линейной системы для аппроксимации поведения решений нелинейной системы в окрестности точки равновесия.
Линеаризация позволяет выявить большинство качественных и особенно количественных свойств нелинейной системы.
Методы линеаризации имеют ограниченный характер, то есть эквивалентность исходной нелинейной системы и ее линейного приближения сохраняется лишь для ограниченных пространственных или временных масштабов системы, или для определенных процессов, причем, если система переходит из одного режима работы в другой, то следует изменить и ее линеаризованную модель.
Линеаризация нелинейных динамических систем методом замены переменных
Линеаризация системы нелинейных уравнений в окрестности точки равновесия может быть достигнута путем замены переменных так, чтобы точка равновесия превратилась в начало координат.
Уравнения, полученные в результате указанного действия, будут линейными и называться линеаризацией исходной системы. Точки исходной системы, находящиеся в окрестности точки равновесия, будут соответствовать точкам в окрестности начала координат новой системы. Нас будет интересовать:
- значение новых переменных, близкие к нулю;
- при каких условиях нелинейными выражениями можно пренебречь.
Рассмотрим нелинейную систему: (1) что имеет точки равновесия (p, q). Преобразование u=x-p v=y-q переводит точки равновесия p, q в начало координат. Дифференцирование дает: (2) После замены переменных, подставив их новые значения в каждое уравнение, выделим линейную часть: где F(u,v) и G(u,v) и состоят только из нелинейных выражений. Говорят, что линейная система есть линерализацией системы (1) при таких условиях: Эти последние условия обеспечивают то, что нелинейные выражения F(u,v) и G(u,v) на столько малы по сравнению с u и v при приближении к точке равновесия, что ими можно пренебречь.
Линеаризация на основе якобиана

Замену переменных можно использовать и при другой организации линеаризации. Производят замену: где Это может быть записано в виде: где называется якобиан.
Применительно к функции Z = cp (X , Х2, . XJ, нелинейной относительно системы своих аргументов, решение задачи в сформулированной выше постановке может быть получено, как правило, лишь приближенно на основе метода линеаризации. Сущность метода линеаризации заключается в том, что нелинейную функцию заменяют некоторой линейной и затем по уже известным правилам находят числовые характеристики этой линейной функции, считая их приближенно равными числовым характеристикам нелинейной функции.
Сущность этого метода рассмотрим на примере функции одного случайного аргумента.
Если случайная величина Z является заданной функцией


случайного аргумента X, то ее возможные значения z связаны с возможными значениями аргумента х функцией того же вида, т. е.
(например, если Z = sin X, то z = sin X).

Разложим функцию (3.20) в ряд Тейлора в окрестности точки х = m , ограничиваясь только первыми двумя членами разложения, и будем считать, что

—- значение производной функции (3.20) по аргументу х при х = тх.
Такое допущение равносильно замене заданной функции (3.19) линейной функцией

На основе теорем о математических ожиданиях и дисперсиях получим расчетные формулы для определения числовых характеристик mz ий в виде

Заметим, что в рассматриваемом случае стандартное отклонение аг следует вычислять по формуле


(Модуль производной здесь берется потому, что она
может быть и отрицательной.)
Применение метода линеаризации для нахождения числовых характеристик нелинейной функции


произвольного числа случайных аргументов приводит к расчетным формулам для определения ее математического ожидания, имеющим вид
х2, . хп) по аргументам х. и х. соответственно, вычисленные с учетом знаков в точке шх, т^,тХп, т. е. путем замены всех входящих в них аргументов xv х2, . хп их математическими ожиданиями.
Наряду с формулой (3.26) для определения дисперсии D? можно использовать расчетную формулу вида

где гх х— коэффициент корреляции случайных аргументов х.
Применительно к нелинейной функции независимых (или хотя бы некоррелированных) случайных аргументов формулы (3.26) и (3.27) имеют вид

Формулы, основанные на линеаризации нелинейных функций случайных аргументов, позволяют определять их числовые характеристики лишь приближенно. Точность вычисления тем меньше, чем больше заданные функции отличаются от линейных и чем больше дисперсии аргументов. Оценить возможную ошибку в каждом конкретном случае не всегда удается.
Для уточнения результатов, полученных по данному методу, может быть использован прием, основанный на сохранении в разложении нелинейной функции не только линейных, но и некоторых последующих членов разложения (как правило, квадратичных).
Кроме того, числовые характеристики нелинейной функции случайных аргументов можно определять на основе предварительного отыскания закона ее распределения при заданном распределении системы аргументов. Однако нужно иметь в виду, что аналитическое решение такой задачи часто оказывается слишком сложным. Поэтому для нахождения числовых характеристик нелинейных функций случайных аргументов широко используется метод статистического моделирования.
Основой метода является имитация серии испытаний, в каждом из которых путем моделирования получается определенная совокупность хи, x2i, . xni значений случайных аргументов xv х2. хп из множества, отвечающего их совместному распределению. Полученные значения с помощью заданного соотношения (3.24) преобразуются в соответствующие значения z. исследуемой функции Z. По результатам zv z2, . z., . zk всех к таких испытаний искомые числовые характеристики вычисляются методами математической статистики.

Пример 3.2. Определить на основе метода линеаризации математическое ожидание и стандартное отклонение случайной величины

если
1. По формуле (3.20) получаем

2. Используя таблицу производных элементарных функций, находим


и вычисляем значение этой производной в точке :


3. По формуле (3.23) получаем
Пример 3.3. Определить на основе метода линеаризации математическое ожидание и стандартное отклонение случайной величины


1. По формуле (3.25) получаем


2. Запишем формулу (3.27) для функции двух случайных аргументов
3. Находим частные производные от функции Z по аргументам Х1иХ2:

и вычисляем их значения в точке (mXi ,тх2):

4. Подставив полученные данные в формулу для расчета дисперсии Z, получим Dz = 1. Следовательно, и стг = 1.
Здравствуйте. Нужна помощь с задачей линеаризации. Имеется модель, что описывается функцией двух переменных:
Нужно её линеаризовать в заданных точках: x = 1, u = 1. Как это сделать, если дана только функция - я не знаю. Уже и на других сайтах искал, но ответа так и не нашёл. Буду признателен за помощь.
График функции от двух переменных
Есть сложная функция, которая представляет из себя сочетание функций Бесселя, Неймана и их.
Апроксимация функции двух переменных
Люди добрые, помогите. Я уже совсем отчаялся. В Маткаде не выходит. Мне нужно вывести функцию.

Исследование функции двух переменных
Помогите сделать плиз.
График функции двух переменных
Здравствуйте! Помогите построить график двух переменных по следующему выражению:
Читайте также: