
Как сделать кпп на ардуино
Добавил пользователь Morpheus Обновлено: 04.10.2024
Я работаю над созданием своего первого робота. это мой первый набег на электронику DIY. У меня уже есть Arduino Uno, и я заказал здесь двойную коробку передач Tamiya . Моя цель - контролировать коробку передач для перемещения робота, но из того, что я уже прочитал, мне нужно что-то между Ардиуно и двигателями. Похоже, у людей есть проблемы с этим, потому что включенные двигатели имеют низкое напряжение, поэтому щит двигателя Arduino будет нелегко работать.
Я ищу четкое решение для того, чтобы эта работа выполнялась, самым простым способом. Одна вещь, которую я рассматриваю, заключается в замене двигателей в коробке передач с этими двигателями . Если я это сделаю, я прав, думая, что смогу запустить их с моторного щита Arduino?
Если есть более простой (или более дешевый!) способ заставить его работать, чем застревать на щите Arduino Motor, я играю за это. Я просто тяготел к этому решению, потому что он кажется проще, чем электроника noob. (Я еще не купил этот щит.) Но я действительно открыт для других решений, поэтому, если можно, я был бы признателен за совет!
2 ответа
Вот что я нашел об экранах двигателя и двигателя:
- Двигатели 3-6 В и будут использовать много силы тока. Это может быть проблемой с мобильным роботом. Вам нужно будет выяснить источник питания, который может обеспечить 4+ усилителя . по мощности аккумулятора это много. Лично я пошел бы с непрерывным сервоприводом для компактного, легкого робота.
- Motor sheild может обеспечивать 2x 2A-каналы при 5-12 В ( Источник ), используя два терминала + и - в нижней левой части экрана. Вы должны подключить внешнее питание, потому что USB не может обеспечить достаточную мощность. Я не могу найти, будет ли моторный щит ограничивать ток, если он пройдет, но если вы используете коробку передач, я бы рекомендовал еще один маршрут для контроля, который составляет 1/6 от цены.

Время взбивать паяльник! Действительно, пайка - отличная инвестиция, и вы скоро достигнете точки, где вам понадобится ; другой альтернативы не будет. Удача для вас, вам нужно только припаять 16 суставов. Заголовки включены.
Диаграммы с сайта Pololu:
* (Нажмите, чтобы увеличить ^^^) **
* Я добавил немного текста к этому изображению.
Электродвигатели типа FA130 в наборе с двойной коробкой передач Tamiya (№ 70168) представляют собой двигатели постоянного тока с напряжением 1,5 В-3 В с номинальным током 0,20А (без нагрузки), 0,66 А (максимальная эффективность) и 2,2 А (стойка ), см. 1.5-3V DC Motor 6990 RPM . Они не являются высоковольтными двигателями.
Похожие вопросы
Популярные теги
Контроллер предназначен для использования в баттон-боксах, платах на рулях, педалях, для подключения шифтеров, ручников, т.е. для подключения различных кнопок, энкодеров и аналоговых осей.
- эмуляция Joystick/Keyboard/Mouse
- поддержка до 6х аналоговых осей (12 бит — 4096 дискретных значений)
- калибровка осей, шейпинг осей
- поддержка кнопок в матрице
- поддержка одиночных кнопок
- поддержка энкодеров
- поддержка галетников
- поддержка POV Hat Switch
- поддержка аналоговых входов как кнопок
- 1KHz частота обмена с ПК
Со стороны ПК контроллер выглядит как обычный джойстик/клавиатура/мышь, установки драйверов не требует.
Для этого проекта я решил использовать не Ардуино, а плату для разработчиков на основе STM32F103C8T6. Вот для сравнения их характеристики:
Как видите, STM32F103C8T6 на фоне Ардуино выглядит вполне неплохо, а стоит дешевле. Один из основных минусов состоит в том, что для заливки прошивки в него нужен отдельный программатор, но он тоже недорог.
Я покупал все на алиэкспрессе, например вот и вот. Также можно встретить BlackPill плату — линк. У нее чуть меньше выводов, но есть монтажные отверстия.

Распиновка после первоначальной заливки прошивки:
Кроме этого, я написал небольшую программу OSHStudio, которая позволяет переконфигурить пины под конкретно ваши нужды. Выбор функции для пинов осуществляется на вкладке Pins Configuration, здесь же можно выбрать ваш тип платы (это влияет только на графическое отображение расположения пинов)

Мышь
Можно настроить аналоговый вход как одну из 2х осей мыши, либо колесо прокрутки, левая/правая/средняя кнопки настраиваются на вкладке кнопки

Кнопки
Энкодеры


При необходимости можно переназначить какие выводы к какому конкретно энкодеру будут принадлежать на вкладке Single Encoders Config

Галетники
Одномоментное нажатие виртуальной кнопки происходит при смене положения вала.

Аналоговые входы

Также есть возможность объединить два аналоговых входа в одну ось — combined axis. Сделано преимущественно для баранок с двумя лепестками сцепления. При этом есть два режима работы:
Также есть возможность сделать шейпинг оси. Есть 6 предопределенных пресетов, каждый из них можно изменить любым образом и присвоить собственное название

Analog2Button — Аналоговые входы в кнопки
C 0.15 версии появилась более продвинутая возможность преобразования аналоговых входов в кнопки. Можно сконфигурировать до 10 аналоговых входов (тип пина Analog2Button) и на каждом иметь до 10 кнопок (общее кол-во кнопок, тем не менее, не может превышать 64). Все это настраивается на вкладке Analog 2 Buttons, каждая ось может иметь свое кол-во кнопок:
Вкладка Tuning
На вкладке Tuning можно настроить при необходимости такие параметры (сверху вниз):
Исходники в моем проекте на github.
Если у Вас есть вопросы о том, как залить прошивку, то можно посмотреть эту запись.


Чуть похвастаюсь достижениями. Сделал приборку на сервах, также кучу лампочек, так же подключил (топливо, низкий уровень АКБ, дальний/ближний и т.д.) Ну и сегодня получилось реализовать, именно так, как я хотел переключатель поворотников (при возврате руля он сам отщелкивается), и делитель КПП.

Приветствую други. Вот выдалась пару часиков в выходных собрал кокпит-стойку для руля. Места у меня маловато, поэтому получился такой минимализм. На данный момент всё соединено штатными резинками, из-за чего всё шевелится при работе обратной связи. НО это пока, сделаю обкатку с недельку, посмотрю на остальные нюансы, тогда уже можно крепить и красить.Кстати руль (в данной конструкции) можно повернуть и добиться горизонтального расположения "баранки" , похоже на автобусный вариант.
Продолжение:
1) конструкция "гуляла", решил "ужесточить" конструкцию, решил вставить в трубы деревянные вставки.
2) верх стойки переделал малёк, что позволит закрепить приборную панель.
В планах на выходные:добиться достаточной жёсткости конструкции и определится с КПП.
Продолжение 2:
1) после недели покатушек решил прекрепить полку к стойки, а на полку крепить руль.
2) поставил шпильку: даёт жёсткость конструкции и служит упором для игры "в горизонтальном положении".
3) прикрепил полочку для КПП ( пока присматриваюсь, не совсем доволен результатом).
4) решил перевернуть педальный блок.
Параллельно ведутся эксперименты с приборкой, всё больше чаша склоняется в пользу сервы.
Скетчи и инструкция для робота-машинки на базе Arduino.
1. Сборка машинки
На занятиях мы с вами навесили на машинку все модули, что были в комплекте, и вы можете запрограммировать робота как минимум на:
Немного о подключении проводов
После сборки робота необходимо соединить модули между собой. Для этого нужно соединить пины на драйвере шагового двигателя (красная микросхема) с пинами на ардуино или плате расширения. Пин это вид электрического соединителя, он может быть в виде розетки или гнезда. В обиходе пинами называют, по сути, любой вид вывода от контакта микросхемы. А вот соединять их нужно ТОЛЬКО исходя из особенностей скетча или можно самим менять в скетче значения подключаемых пинов. Ну или писать скетч самим. Скетч - это программа, написанная в среде Arduino IDE. Сборку и подключение машинки поясню на примере скетча для управления через ИК & BT.
Распиновка (цоколевка) ардуино выглядит вот так:
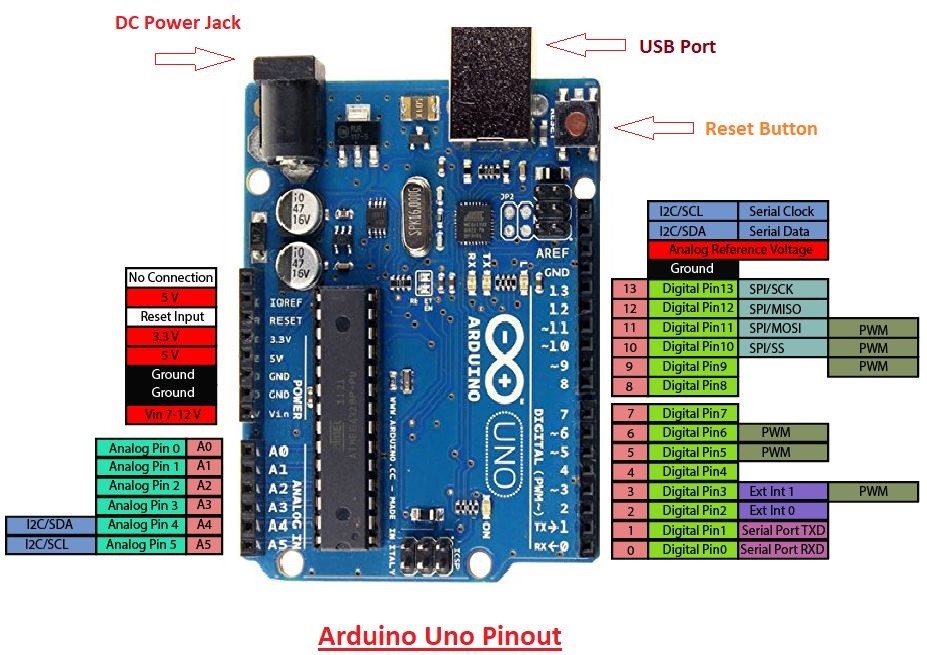
Мы будем использовать следующие пины:
Если поставить сверху шилд, то распиновка не изменится, но добавятся дублирующие цифровые и аналоговые выходы и появится много пинов земля+питание.
Обратите внимание, что на каждый радиотехнический компонент, будь то диод или модуль, есть т.н. даташит (datasheet) – инструкция, которая описывает характеристики, особенности подключения, функционал и прочую необходимую об устройстве информацию. Как ее искать я объяснял на лекции, но если простым языком, то все опять же ищется в google исходя из той маркировки, что нанесена на модули. Если с маркировками все плохо, то можно использовать google картинки =)
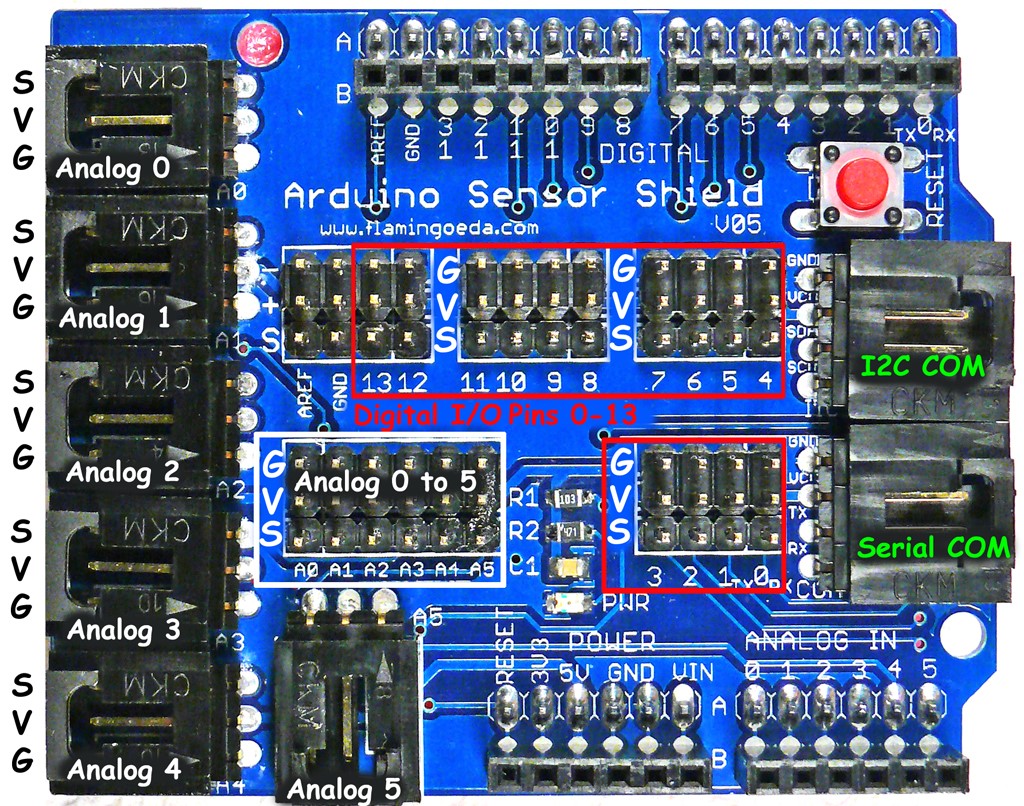
Шилд выглядит примерно вот так:

Вот так выглядит ИК датчик:
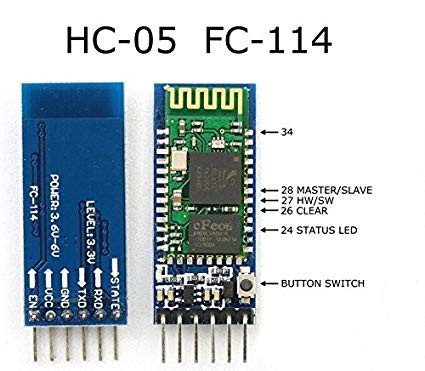
А вот так Bluetooth датчик:
Подключение модулей к ардуино
Как я писал ранее, при соединении модулей надо исходить из особенностей скетча. Если какой-то модуль, двигатель и т.д. не предусматривает его подключение, НЕ НАДО ЕГО ПОДКЛЮЧАТЬ. Лучше пусть провода болтаются. Например, возьмем, скетч для управления через ИК & Bluetooth “IR_BT_Remote_Control_Car_v2_1” (про прошивку скетчей есть отдельная тема ниже). Нам нужно подключить драйвер шагового двигателя, ИК и Bluetooth датчики.
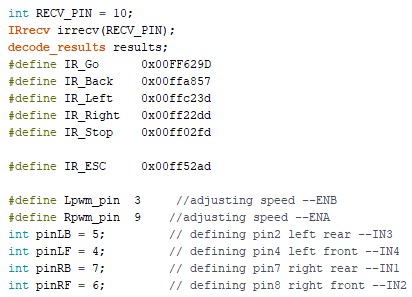
В нем, если приглядеться, можно увидеть, что за сигнал с ИК порта отвечает 10 цифровой пин, за двигатели пины 3-7, 9.
Поэтому ИК датчик подключаем так: G -- GND R -- 5V Y -- 10 Важно! Не перепутайте контакты, ИК датчики ОТЛИЧНО ГОРЯТ, если их неправильно подключить.
А драйвер подключаем вот так:
ENA, IN1, IN2 - пины управления правой парой двигателей ENB, IN3, IN4 - левой парой двигателей И не забываем присоединить Vin -- Vms (отвечает за внешнее питание).
Plus FFA857
EQ FF906F
0 FF6897
100 FF9867
200 FFB04F
1 FF30CF
2 FF18E7
3 FF7A85
4 FF10EF
5 FF38C7
6 FF5AA5
7 FF42BD
8 FF48B5
9 FF52AD
Можете попробовать поменять их затем в коде и посмотреть что из этого выйдет.
Bluetooth датчик подключается через протокол UART, он задействует цифровые пины 0 и 1.
Важно! При прошивке Ардуино RX и TX должны быть отключены, или у вас постоянно будет выскакивать ошибка загрузки.

Если вам не хватает коннекторов Для этого существуют провода F-F (мама-мама) с двумя розетками. В комплекте их нет, но вы можете воспользоваться макетной платой:
2. Прошивка Arduino
Фактически, ваша машина имеет неограниченное число функций, если вы знаете как ее программировать. Если нет, можно взять стандартный и загрузить его в микроконтроллер. Для этого нужно:
2.3 Распаковать библиотеки для Arduino IDE
2.4 Прошивка микроконтроллера
Запускаем среду Arduino IDE и скетч. Для этого достаточно кликнуть на желаемом скетче расширения .ino Подключаем плату Ардуино к ПК. Ардуино должно определиться в программе:
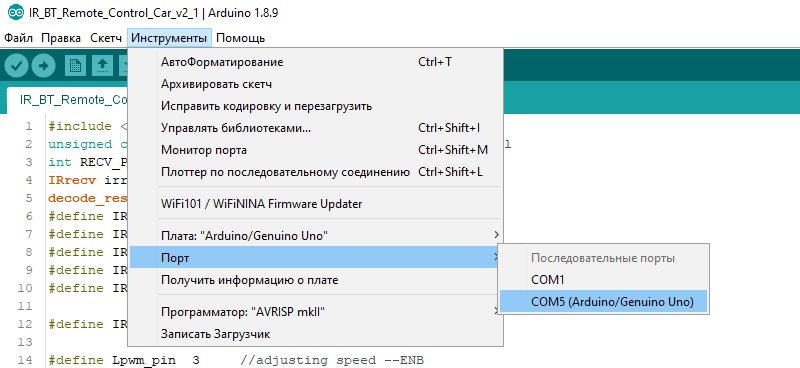
В разделе “Плата” должна стоять “Arduino UNO”
После этого мы жмем кнопку “загрузить”
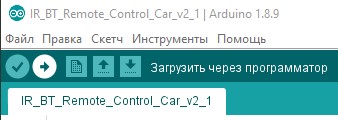
И ждем пока пока программа загрузится в Ардуино.
В случае удачной прошивки все готово, можете пользоваться машинкой.
Важный момент - если светодиоды у машинки горят, но она не двигается, то проблема, возможно, в батарейках, они быстро садятся и если тока в них недостаточно (особенно дешевые батарейки), то двигатели просто не работают. Поэтому для тестирования лучше использовать блок питания 7-12В, подключив его напрямую к входу ардуино (DC Power Jack) или к коннектору.
Машинка управляется с пульта, для управления используются вот эти кнопки: (где квадрат это “стоп”)

Если машинка не едет, нужно нажать несколько раз вперед-назад.
Управление с помощью Bluetooth осуществляется с помощью программы BLEJoystick (Android & IOS)
Сначала нужно узнать MAC адрес bluetooth модуля. Для этого нужно подать питание на модуль, уйти подальше от других bluetooth устройств и просканировать MAC адреса с помощью программы. Один из адресов должен быть вашим (обычно он начинается на BT-05). Адрес лучше записать.
Для подключения к машинке нужно нажать на соответствующий ей MAC адрес и нажать CONNECT. Если у значка BT справа сверху появились две точки, это значит, что устройства сопряжены и можно продолжать, если нет, нужно попробовать еще раз, включив-выключив машинку.
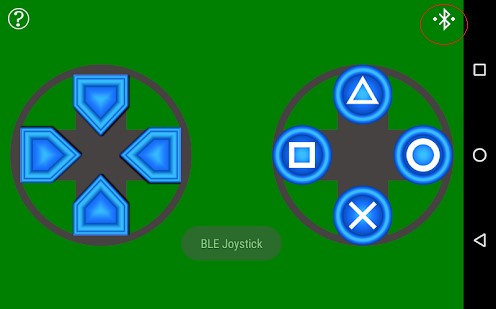
Управление - слева движение, Х - стоп.
В скетче вы также можете найти настройки Bluetooth и при необходимости использовать любое другое понравившееся приложение:
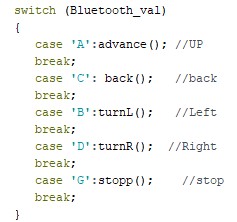
Символы A, C, B, D, G – это установки приложения BLEJoystick, другие приложения могут иметь другие управляющие символы.
4. Прочие прошивки
В папках вы также можете найти другие программы для машинки. Папка Sketches-Factory содержит в себе программы, любезно украденные у китайцев. Можете запрограммировать машинку на движение по линии или избегание препятствий.
Читайте также: