
Как сделать шагающего робота из лего техник
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
EV3 робот для начинающих. Как сделать робота лего. Lego тележка за 3 минуты. Робототехника Lego для начинающих.
Сборка робота из Lego Technic 42065 ;) А какие у вас есть идеи по сборке данного конструктора? напишите об этом в .
Реальный четвероногий робот. Его уникальный механизм означает, что он может ходить, избегать препятствий и даже .
Лего рука. Как сделать руку из лего техник. Сборка простейшего захвата из лего техник. Лего техник инструкции .
Hazardous environments operation bot Собратья этого робота успешно несут службу в различных армиях и полиции .
Этот парень сделал своими руками протез для руки из лего. Часто мы жалуемся на жизнь, что нам нехватает денег, сил .
Модель насекомого с дистанционным управлением. Два М мотора, приёмник, батарейный блок. Оригинальный дизайн .
Всем привет, это самоделка, поэтому могут быть недоработки , и поэтому вы сможете проявить свою фантазию и .
Сделал пистолет из лего техник, который стреляет деталями, механизм самый простой, работает на резинках, каждый .
Привет, это пятая серия из цикла обзоров роботов LEGO Mindstorms 51515 Robot Inventor. Сегодня мы рассмотрим .
В этом видео я рассказал как сделать из ЛЕГО ТЕХНИК деталей самый легкий рулевой механизм без рулевой рейки.
Сделали робота собаку из лего майндстормс. За основу взята модель Dinor3x из официальной инструкции к набору: .
Механизмы из Лего - рубрика на моём канале, которая стала достижением для меня в этом году. Сегодня расскажу про .
В этом видео я покажу как сделать шестиногий шагоход из лего техник на пульте управления. Так же я установлю мотор на .
Всех приветствую! В этом видео я расскажу вам о основах легендарной power functions, и разберу все основные модули .
В этом видео я рассказал как сделать из ЛЕГО ТЕХНИК деталей ДОМКРАТ. Обзор набора 42110 Land Rover Defender .
Боевой мех с усиленой броней, укомплетован плечевой, ракетной, пусковой установкой.
Инструкции по сборке от любителей
Руководства по сборке custom моделей от фанатов Lego Technic
Lego Technic McLaren R1 SportCar
Инструкция по сборке доступна в двух вариантах.
Эксклюзивные модели LEGO TECHNIC
Эксклюзивные модели Lego technic, доработки от любителей и энтузиастов.
LEGO Technic - Nissan Nismo GTR в масштабе 1:8
Инструкция по сборке, версия с Power Functions и BuWizz
Lego Technic Ford Mustang Hoonicorn – Ken Block
Кен Блок 1400bhp Hoonicorn Mustang V2. МодельLEGO одноименного спорткара. Эта модель RC Technic MOC поставляется с опциями: красные переключатели скоростей на высокой / низкой скорости, 4wd, V8, рабочий руль и рулевое управление, открывающиеся двери багажника, 8 фар, новая подвеска на борту – одинарная пружина без торсиона. . хром на всем протяжении – Доступный в ручном режиме, 2 двигателях Багги или 2 двигателях Xl и 2 Buwizz.
Lego Technic Land Rover Range Rover VOGUE
Модель Range Rover 2019 VOGUE. Автор – Kaind45. Особенности: 2-L мотора для движения, 1-М мотор для рулевого управления, 1 SBrick, батарея – 88000, 1 Polarity Switch. Подсветка фар. Открывающиеся двери и капот, багажник.
Lego Technic Police Helicopter Manta MOC
Lego Technic Police Helicopter Manta MOC – модель полицейского вертолета от Qrohl. Особенности модели. Возможности модели: Длина 48,5 см, Двойные взаимозаменяемые роторы 36 см, 7-миллиметровый пропеллер с питанием от одного PF-двигателя

Автомобили

Разное

Грузовики
Cada Humvee Station Wagon C61027
LEGO модель армейского вездехода Humvee Station Wagon от CaDa. Инструкция ниже по ссылке.
Lego Technic Volvo FMX 6×4
Модель — Volvo FMX. Автор: EbicVonPetrus. Модель в основном сделана с использованием Technic links и bricks. Шасси — 6х4. Задний мост можно поднять с помощью 2 пневмо-цилиндров. В инструкции имитированы моторы для управления.
LEGO Technic John Deere 6130R tractor
LEGO Technic John Deere 6130R. Автор: LesseD. Модель имеет рабочее рулевое управление, движущийся рядный 4-поршневой двигатель и коробку передач, которую можно включать и даже включать задним ходом с помощью ручки в кабине. Пассажирское сиденье можно сложить, а модель имеет множество деталей, таких как выхлоп, топливный бак, зеркала, фонари и открывающийся капот.
LEGO Technic Avtoros Shaman 8×8 with Sbrick.
Масштабную модель вездехода ШАМАН 8х8 воссоздал японский моделист Madoca1977 из типовых наборов LEGO Technic. Сложная рулевая система, полный привод, подвеска, дистанционное управление!
Lego technic — Icarus Super Car MOC with Sbrick
Lego Technic — Jeep Wrangler MOC
Относительно новая модель от Madoca. Lego Technic Jeep Wrangler. Современный кузов Jeep на необычном шасси. Список деталей содержит дополнительные детали для некоторых опций, таких как хардтоп, трубные двери и дополнительный бампер.
Lego Technic SUV Mk2 MOC
Модель Lego Technic от Madoca — AWD тяжелый внедорожник. 2 XL-мотора для езды. Серводвигатель для рулевого управления. 1 M-мотор для регулируемой по высоте подвески. 1 M-мотор для 2х-скоростной коробки передач.
Lego Technic Monster Truck With Automated Differential Lock
Новинка от Kavin Moo, Monster Truck With Automated Differential Lock. Модель этого года. Особенности: Детали, не принадлежащие LEGO, которые не включены в список деталей:
LEGO Technic Dual-Driveshaft Pickup MOC
LEGO Technic Dual-Driveshaft Pickup MOC — новинка от Kavin Moo. Модель проектировалась по образу — Toyota Tundra Crew. Особенности модели — Вес: 1237 г, Размеры: 350 мм (L) x 150 мм (Ш) х 165 мм (H), Количество деталей: 1660 шт., Движение: двигатель XL,
Lego Technic RC Off-roader With SBrick
Lego Technic RC Off-roader With SBrick от Kavina Moo. Модель собрана на основе Toyota Land Cruiser Prado

LEGO (mecha) Journey to One Makuta
JtO Makuta — модель LEGO (Bionicle + Technic). Автор: scredeye. Кол-во деталей 469. Инструкция в формате — Studio.

LEGO mech frame ‘Solomon Frame’
Frame — основание для ‘Solomon Frame’ Mech. Автор: — Dwihtmt. В инструкция по сборке включена только сборка фрейма. Далее только ваша фантазия. Lego Mech Tutorial || Beleth — модель от автора см. ниже.

LEGO Green Dragon Mech
Green Dragon Mech — альтернативная модель из набора — 70612 Green Ninja Mech Dragon. Автор: beezysmeezy.

LEGO Bracer Phoenix Pacific Rim Uprising

LEGO ENGEL-01 MK-II
Engel-01 MK-II. Автор: Eric Nowack. От автора — этот обновленный МоС лета 2019 года, вмещает одну минифигурку внутри благодаря довольно новому торсу боевого костюма — Nexo Knights 27168 посередине. При сборке используется изрядное количество специальных частей и деталей Technic для достижения своего привлекательного вида. Пройдя около 6 итераций на разных ногах и непрерывно настраивая МОС для стабильности и более визуально приятного стиля, я думаю, что наконец-то с этим покончено.
В общем случае робот может передвигаться прямолинейно и по ломанной траектории. Вычислить передвижение робота на необходимое расстояние по прямой достаточно просто. Для этого должен быть известен диаметр колеса робота. Исходя из этих начальных условий можно вычислить точное количество оборотов колеса, необходимое для преодоления заданного расстояния.
Робот за 3 минуты
Зная количество оборотов мотора робота в минуту можно вычислить время, за которое робот преодолеет нужное расстояние.
Для робота Lego EV3 количество оборотов большого мотора составляет 160 – 170 оборотов в минуту.
Поэтому вычисление времени будет приблизительным т.к. у каждого мотора количество оборотов в минуту может быть разным.
Ломанная траектория представляет из себя комбинацию из прямолинейных и криволинейных участков. Криволинейные участки можно вычислять, используя формулу вычисления длины окружности.
Расчет числа оборотов
Для того, чтобы рассчитать количество оборотов колеса для движения на заданное расстояние по прямой нужно использовать длину окружности колеса. Она вычисляется по формуле L = π * d. Где π – число Пи, равное 3,14, а d –диаметр колеса. Для базового набора Lego EV3 диаметр колеса составляет 56 мм.
Пусть робот EV3 оснащен двумя передними колесами и шаровой опорой сзади и должен проехать 1 метр. За один оборот колеса робот преодолевает расстояние L = π * d = 3.14 * 56 = 175,84 мм. Пусть n – количество оборотов, k – заданное расстояние. Тогда количество оборотов n = k / L =>
n = 1000 мм / 175,84 мм = 5,69 оборотов.
Программа для Lego EV3 для движения робота на заданное количество оборотов.
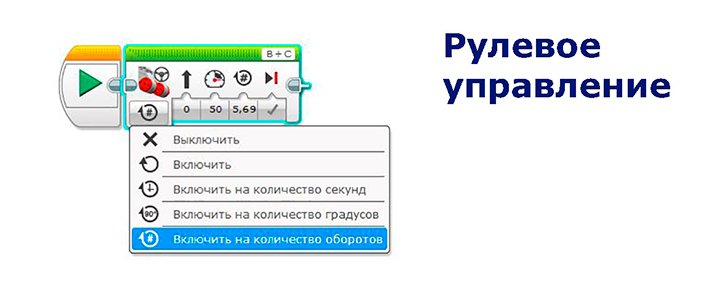
рулевое управление движение по прямой на один метр
В общем случае робот может передвигаться по траектории, которая представляет из себя окружность, часть окружности и комбинации различных частей окружности. При этом робот может:
- Разворачиваться на месте – колеса робота крутятся в разные стороны с одинаковой скоростью;
- Разворачиваться вокруг одного колеса – одно колесо машинки Lego EV3 стоит на месте, другое крутится с заданной скоростью;
- Описывать произвольную окружность – оба колеса крутятся в одном направлении с разной скоростью.
Пусть параметры тележки EV3 будут такими: робот представляет из себя платформу с двумя колесами и шаровой опорой, расположенной сзади. Тележка симметрична и расстояние между центральными осями колес и шаровой опорой является равнобедренным треугольником.

робот тележка лего
Для упрощения расчетов, задам расстояние между центрами колес по оси, но которой они расположены равным 20 см. На многих соревнованиях по робототехнике одним из условий являются габариты робота. Например, нужно чтобы размеры робота были не более 20 см в ширину, 20 см в длину и 20 см в высоту.
Если робот не подходит по габаритам, то его не допускают к соревнованиям. Диаметр колеса 0,56 см – это стандартный размер колеса из базового набора Lego EV3. Левый большой мотор подключен к порту В, правый к порту С. Теперь вычислим количество оборотов колеса для каждого случая и для разворота робота Lego EV3 на определенный угол.
Расчеты применимы для роботов, собранных на базе любых конструкторов. Разница будет заключаться только в среде программирования, т.к. у разных робототехнических наборов разные программные обеспечения. Но принцип расчета везде одинаковый.
Разворот на месте
В этом случае нужно чтобы у робота колеса вращались в разных направлениях с одинаковой скоростью. Для того чтобы робот совершил полный разворот вычислим необходимую длину окружности. Разворот будет на месте, поэтому диаметр между осями будет равен 20 см =>
Длина описываемой окружности будет равна
L = π * d = 3.14 * 0,2 м = 0,628 метра
Количество оборотов будет равно пройденному расстоянию L деленному на длину окружности колеса n = Lокр / L колеса, где длина окружности колеса равна L = π * d = 3.14 * 56 = 175,84 мм = 0,176 м.
А значит количество оборотов для разворота на 360° будет равно
n = L окр / L колеса = 0,628 / 0,176 = 3,568 оборота.
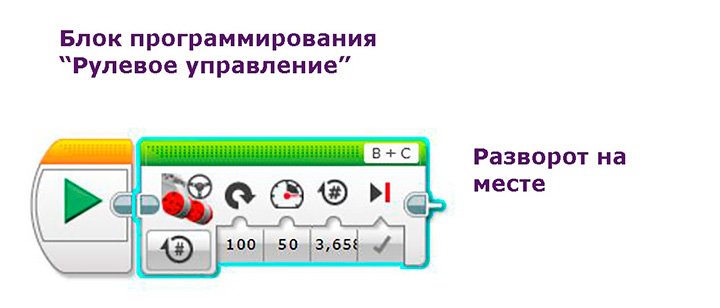
разворот робота на месте рулевое управление
- Для того, чтобы повернуть робота тележку Lego EV3 на произвольное количество градусов нужно составить пропорцию, где нужное количество градусов нужно разделить на 360 градусов и учесть эту пропорцию в расчете.
Например, для разворота на 180 градусов. Обозначим нужную длину части окружности L1 =>
L1 = L * (нужное к-во градусов / 360 градусов) = L * (180 / 360) = L / 2 = 0,628 / 2 = 0,314, а значит к-во оборотов
n = L1 / L колеса = 0,314 / 0,176 = 1,784 оборота.
Поворот вокруг одного колеса
В этом случае у нас радиус поворота будет 20 см, а диаметр описываемой окружности 40 см. Поэтому длина описываемой окружности будет в два раза больше и как для полной окружности, так и для ее части нужно просто предыдущие вычисления умножить на два.
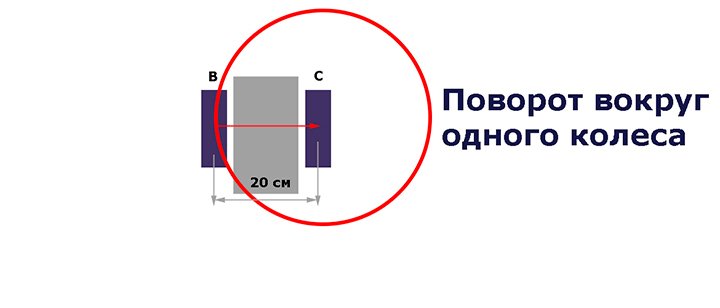
Поворот робота вокруг одного колеса
Для того чтобы сделать поворот вокруг одного колеса на 360 градусов нам понадобится в предыдущей формуле d умножить на 2, а значит и количество оборотов колеса увеличится вдвое.
L = π * 2 * d = 3.14 *2 * 0,2 м = 1,256 метра
Движение по окружности произвольного диаметра
Пусть расстояние от центра окружности до середины первого колеса будет R1. Расстояние от центра окружности до середины второго колеса R2.
В этом случае мы получаем движение колес по окружностям разного диаметра за одинаковое время. Регулировать такое передвижение можно за счет разности скоростей внешнего и внутреннего колеса.
Длина окружности, которую проезжает правое колесо обозначим как L1
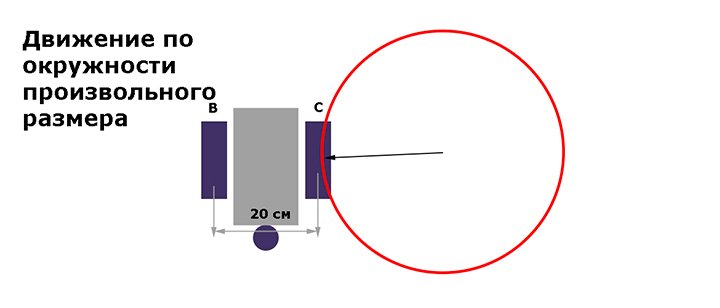
Движение робота по окружности произвольного размера
L1 = 2 * π * R1
Длина окружности для левого колеса
L1 = 2 * π * (R1 + R2)
Скорость правого колеса V1, а скорость правого колеса V2.
Время за которое заданное расстояние пройдет правое колесо t1.
t1 = L1 / V1 = (2 * π * R1) / V1
Время, за которое заданное расстояние пройдет левое колесо t2.
t2 = L2 / V2 = (2 * π * (R1 + R2)) / V2
Время проезда окружности или ее части левым и правым колесом у нас одинаковое t = t1 = t2, а значит и правые части выражений равны.
L1 / V1 = L2 / V2 ó (2 * π * R1) / V1 = (2 * π * (R1 + R2)) / V2 ó
Упрощаем выражение и получаем следующую пропорцию
V2 / V1 = (R1 + R2) / R1
Сейчас можно вычислить скорости левого и правого колеса для заданной окружности. Пусть у нас R1 = 20 см и R2 = 20 см, для упрощения скорость левого колеса возьмем 100 условных единиц. Тогда
V2 / V1 = (R1 + R2) / R1 ó 100 / V1 = (20 + 20) / 20
100 / V1 = 2 ó V1 = 100 / 2 ó V1 = 50 условных единиц.
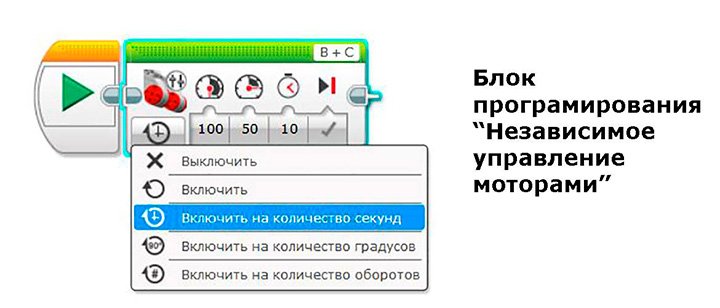
Независимое управление моторами Lego EV3 произвольная окружность
Часто на соревнованиях одним из заданий является движение робота по черной линии с объездом препятствий. И для успешного преодоления трассы необходимо вычислить траекторию объезда. При помощи таких вычислений это сделать достаточно легко.
Лего рука. Как сделать руку из лего техник. Сборка простейшего захвата из лего техник. Лего техник инструкции .
Реальный четвероногий робот. Его уникальный механизм означает, что он может ходить, избегать препятствий и даже .
Сборка робота из Lego Technic 42065 ;) А какие у вас есть идеи по сборке данного конструктора? напишите об этом в .
Hazardous environments operation bot Собратья этого робота успешно несут службу в различных армиях и полиции .
В этом видео я рассказал как сделать из ЛЕГО ТЕХНИК деталей самый легкий рулевой механизм без рулевой рейки.
EV3 робот для начинающих. Как сделать робота лего. Lego тележка за 3 минуты. Робототехника Lego для начинающих.
Обзор на игрушки от недовольного робота Валли. Он рассказывает о тех моделях, что были в прошлых частях Лего Битвы, .
Модель насекомого с дистанционным управлением. Два М мотора, приёмник, батарейный блок. Оригинальный дизайн .
Читайте также: