
Трицикл из гироскутера своими руками
Добавил пользователь Владимир З. Обновлено: 05.09.2024
Прошивка платы надоевшего гироскутера под ручку (педаль) газа открывает новые возможности для самодельщиков электротранспорта. Гироскутер (ховерборд) является отличным недорогим донором для изготовления электротранспорта своими руками. На основе запчастей гироскутера можно собрать электросамокат, трайк, детский четырехколесный автомобиль, багги, самоходную тележку и другие двух (и более) колесные полезные и интересные самоделки.
Некоторые самоделки Вы можете посмотреть в этом видео.
Второе условие – плата контроллера обязательно должна быть с чипом STM32F103RCT6, GD32F103RCT6, CS32F103RCT6 (символы после не имеют значения). Работа прошивки с другими чипами не поддерживается.
Что понадобится для прошивки
Программатор ST-Link
Программатор ST-Link V2 доставка из Китая / доставка из РФ, стоимость из китая около 400 руб. Все необходимые провода для подключения будут в комплекте. Подключается в USB порт ПК и тремя проводами к плате гироскутера.
Утилита для программатора STM32 ST-LINK Utility
Скачиваем с официального сайта актуальную версию. Нужно будет принять пользовательское соглашение и указать действующий адрес электронной почты. На него придет письмо со ссылкой на скачивание утилиты.
При установке всё предельно просто, и проблем возникнуть не должно.
Интерфейс утилиты выглядит следующим образом:
Драйвера для программатора ST-Link V2
Распаковываем архив и от имени администратора запускаем dpinst_amd64 (для х64) или dpinst_x86 (для х32) в зависимости от разрядности операционной системы. Разрядность можно посмотреть – Мой компьютер – свойства, (тип системы)
Исходник прошивки
Исходник прошивки (проект) прямая ссылка скачиваем, извлекаем из архива и сохраняем. Его будем настраивать.
Программа Visual Studio
Программа Visual Studio позволит настроить прошивку нужным нам образом и создать BIN-файл, который мы и будем заливать в микроконтроллер с помощью программатора. Для скачивания Visual Studio нужно будет зарегистрироваться на сайте. В процессе установки необходимо соглашаться на все разрешения для программы.
После запуска необходимо установить дополнение PlatformIO IDE. Копируем название, жмем на значок в левом меню, вставляем в поле поиска, выбираем из списка и жмем Install. После завершения установки и автоматических обновлений (это может занять немало времени и она подгузит еще несколько нужных дополнений сама) программа готова к работе.
В некоторых случаях потребуется дополнительно установить Python. На свой компьютер я его не устанавливал, так как всё работает и без него. У некоторых пользователей без него работать не получается.
Также при неполадках с программой иногда помогает её запуск через “Исправление неполадок совместимости” (жмем на иконку программы правой кнопкой мыши, из меню выбираем эту функцию) экспериментируем с различными вариантами.
Настройка прошивки
В исходном состоянии прошивка не готова к заливке в контроллер и её нужно подготовить. Все скриншоты сделаны после редактирования настроек под ту конфигурацию, которая была необходима мне для электросамоката. В ней оба колеса вращаются в одном направлении, максимальный ток на один мотор 15А. Для своих нужд Вы можете экспериментировать с настройками.
Открываем в программе Visual Studio папку с проектом (исходником прошивки). Жмем иконку Explorer – File – Open Folder и выбираем папку с проектом. Необходимо выбрать именно конечную папку с этим названием, иначе прошивка может не компилироваться (собираться).
Выбор режима управления
Открываем в левом меню пункт platformio.ini. Здесь мы видим список возможных вариантов управления. Для управления ручкой газа служит вариант HOVERCAR. Для его активации нужно раскомментировать строку default_envs = VARIANT_HOVERCAR; Variant for HOVERCAR build, для этого убираем знак ; в начале строки.
Далее в левом меню выбираем Inc – config.h, открывается код, в котором проводим необходимые настройки.
Настройка батареи
Так как исходник проекта периодически обновляется, у Вас номера строк могут отличаться от тех, что я привожу в скриншотах, но по тексту их легко найти. Вы можете воспользоваться переводчиком, чтобы понять за что отвечают строки, я приведу описание только понятных мне.
Настройки батареи (строки 63-82).
Эта настройка нужна для того чтобы научить контроллер правильно измерять напряжение батареи. При вводе неправильного значения в BAT_CALIB_REAL_VOLTAGE возможно преждевременное отключение контроллера, отключение сразу после запуска.
При использовании 10S литий ионной батареи допускается её разряд до 30 В. Поэтому значения BAT_LVL2, BAT_LVL1 и BAT_DEAD целесообразнее установить 340, 320 и 300 соответственно.
Отключение/включение моторов
138 // Enable/Disable Motor
Типы управления и методы контроля
Для самокатов, машинок и других проектов с водителем лучше подходит FOC_CTRL в сочетании с TRQ_MODE (управление моментом). При этом управление наиболее мягкое, высокая энергоэффективность, свободный накат при сбросе газа.
Также в разделе ховеркар (ищите ниже)
Ограничение тока и оборотов
В зависимости от используемых моторов можно отрегулировать максимальный вливаемый в них ток. Для своих 250 Вт моторов я оставил ток по умолчанию 15А. На практике любая плата выдерживает продолжительный ток 20 А (потребуется улучшить охлаждение), более высокий ток на ваш страх и риск.
define I_MOT_MAX 15 – максимальный ток одного мотора, А
define I_DC_MAX 17 – ставим на 2 Ампера больше как рекомендует автор
define N_MOT_MAX 1000 – ограничение максимальнх оборотов, об/мин
Если Вы хотите понизить максимальные обороты, например для безопасности при эксплуатации транспортного средства детьми, уменьшите define N_MOT_MAX экспериментально подобрав это значение для своих моторов. При этом ослабление поля из следующего пункта настроек обязательно должно быть отключено.
Ослабление поля/опережение фазы
Ослабление поля позволяет раскручивать мотор на бОльшие обороты без увеличения напряжения батареи. При этом если силы моторов хватает для ускорения под нагрузкой, они раскрутятся. Также увеличится и расход батареи. Если при резком сбросе газа после разгона до повышенной скорости моторы будут притормаживать до замедления до некой промежуточной скорости, установите в FIELD_WEAK_HI и N_MOT_MAX значение 1600.
// Field Weakening / Phase Advance
153 define FIELD_WEAK_ENA 1 – Включение ослабления поля / опережения фазы: 0 = отключено (по умолчанию), 1 = включено
154 define FIELD_WEAK_MAX 6 – Максимальный ток ослабления поля, чем больше тем выше возможная скорость (максимум 10)
156 define FIELD_WEAK_HI 1000 // (1000, 1500] – Верхний порог для ограничения оборотов, ставим 1600 если наблюдается глюк при сбросе газа как описано выше
157 define FIELD_WEAK_LO 750 // ( 500, 1000] – Нижний порог для начала ослабления поля, рекомендуется оставить 750
Направление вращения моторов
Раскомментировать для активации. По умолчанию моторы вращаются как если бы они стояли на гироскутере и он катился вперед. На скриншоте инвертирован правый мотор, при этом оба мотора (если смотреть со стороны оси) вращаются по часовой стрелке.
Формирование файла прошивки
После завершения настройки нужно нажать галочку внизу. Программа проверит код на ошибки и при их отсутствии сохранит редактированный нами файл прошивки в папку с проектом по адресу hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / build / VARIANT_HOVERCAR / firmware.BIN. Его мы и будем заливать в чип платы гироскутера.
Если возникают ошибки, проверяем визуально не поставили-ли чего лишнего или не удалили-ли что то нужное. Галочка запуска компиляции может отсутствовать если идет обновление компонентов Visual Studio.
Также замечены похожие платы, но немного с другой разводкой. Они встречаются очень редко, но всё же они есть. После прошивки зуммер не издает звуков – возможно у Вас такая плата. В послендем обновлении исходника появилась и эта версия. В config.h строки 61…66 выбираем вариант 0 – (подходит большинство плат), вариант 1 – второй, более редкий тип плат.
Примеры готовых прошивок
Если у Вас не получается скомпилировать прошивку со своими настройками, я оставлю примеры готовых файлов прошивки.
- направление вращения моторов для самоката. Инвертирован правый мотор (оба мотора вращаются по часовой стрелке, если смотреть со стороны оси)
- максимальный ток на мотор 15 А (17 А макс) не используйте гироскутерную батарею для такого тока!
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
- направление вращения моторов для трайка
- максимальный ток на мотор (детский вариант) 7 А (9 А макс), такой ток не должен повредить большинство исправных гироскутерных батарей 10S 2P
- ослабление поля 0
- напряжение батареи на момент прошивки 36,00 В
- без ограничения оборотов (при напряжении батареи 36 В большинство моторколес без нагрузки будет иметь около 450 об/мин)
Подключение программатора к плате
Программатор ST-Link V2 подключается выводами SWDIO, GND и SWCLK к соответствующим точкам на плате, как показано на рисунке ниже. Чип будет брать питание от родной гироскутерной батареи, поэтому вывод +3,3 V подключать не нужно. Убедитесь что батарея достаточно заряжена и питание не пропадет в момент прошивки.
При прошивке должны быть подключены:
- батарея гироскутера
- кнопка включения гироскутера
- программатор
Процесс прошивки
- Запускаем STM32 ST-LINK Utility
- зажимаем и удерживаем кнопку включения гироскутера в течение всего процесса
- для подключения к чипу жмем Target – Connect (альтернатива – иконка серой вилки на панели управления)
Появившееся предупреждение Can not read memory!… Означает, что чтение родной прошивки недоступно, так как она защищена от чтения.
Придется её стереть. Внимание. После стирания её невозможно будет восстановить.
Снимаем защиту от перезаписи
После завершения этой манипуляции получаем чистый чип
Теперь выбираем файл своей прошивки
Напоминаю, что по умолчанию после настроек в Visual Studio файл прошивки будет находиться по пути hoverboard-firmware-hack-FOC-masterhoverboard / firmware-hack-FOC-master / .pio / buildVARIANT_HOVERCAR / firmware.BIN.
Я создал несколько вариантов прошивок с разными настройками и поэтому выбираю из своей папки.
После удачного завершения процесса в нижнем окне увидим Verifycation…OK и Programmed Memory Checksum: ******
Если у Вас что-то идет не так, проверьте внимательно по скриншотам наличие галочек, и прочих настроек, где они присутствуют на каждом этапе.
При последующих заливках прошивки обязательно предварительно стирайте чип кнопкой Full chip erase, иначе фрагменты старого кода будут мешать работе нового!
Подключение ручки газа и тормоза
В качестве ручки газа можно использовать велосипедные или самокатные газульки с датчиком Холла, педали, либо обычные потенциометры. Подключение по трем проводам, как на схеме внизу. Цвета проводов на платах гироскутеров могут отличаться от приведенного примера, поэтому ориентируемся по расположению точек (пинов) на плате.
Всвязи с тем, что обычно ручки управления выносятся далеко от платы, в проводах могут наводиться помехи, что может вызывать нестабильную работу и ложные срабатывания. Для подавления этих помех следует повесить между сигнальными входами и GND конденсаторы ёмкостью 0,03…0,1 мкФ и резисторы сопротивлением 1…10 кОм, лучше сделать это как можно ближе к плате.
Тормоз может не подключаться вообще, если он не нужен и в Вашей конструкции предусмотрены механические тормоза. На практике он отлично работает и в своём самодельном самокате я использую его и не стал заморачиваться с механическими. Но повесить на него резистор и конденсатор нужно обязательно! И при калибровке (о ней будет ниже) нужно показать вход тормоза сымитировав нажатие кнопки (синий провод на +3,3 В).
При срабатывании на скорости он начинает тормозить рекуперацией, отдавая энергию в батарею. Когда скорость падает до определенного значения, при которой рекуперация становится неэффективна для торможения, контроллер наоборот вкачивает в моторы энергию батареи продолжая активное торможение до полной остановки. На всём продолжении торможения полная блокировка колес исключена и получается некий эффект ABS. Усилие торможения развивается достаточное для того чтобы почти улететь через руль при полном резком нажатии. Поэтому реализовывать его с помощью одной только кнопки – плохая идея. Для плавного дозирования торможения годится аналогичная газульке ручка на датчике Холла. Вариант подешевле – кнопка с потенциометром. Потенциометром в этом случае устанавливается требуемое усилие торможения.
Калибровка ручек газа и тормоза
Сразу после прошивки не будет никакой реакции на нажатия ручек газа и тормоза. Для того чтобы контроллер понимал, как на них реагировать, его необходимо обучить. Во время этой операции он запомнит минимальные и максимальные значения напряжений сигналов управления. Они не обязательно должны быть именно от 0 до 3,3 В и могут принимать любые значения этого диапазона, например от 0,5 В до 3 В.
Перед калибровкой необходимо убедиться, что контроллер выключен, колёса (включая фазные провода и провода от датчиков Холла), ручки газа и тормоза (если она нужна) подключены согласно схеме.
Для входа в режим калибровки нужно выполнить следующие действия:
- нажать и удерживать кнопку питания контроллера не менее 2 сек, в этот момент прозвучит многотональный звуковой сигнал
- кратковременно отпустить (менее секунды) и снова зажать и удерживать кнопку питания, в этот момент прозвучит короткий гудок высокого тона
- дождаться короткого гудка высокого тона
- отпустить кнопку питания
- дождаться длинного гудка низкого тона
- нажать пару раз полностью на ручку газа и отпустить
- нажать пару раз полностью на ручку тормоза и отпустить(если используется кнопка с потенциометром, то нажимать её при выкрученном потенциометре в минимальное сопротивление, чтобы показать максимальное напряжение на сигнальном проводе)
- нажать кнопку выключения
- перезагрузить контроллер и проверить реакцию на нажатия ручек управления
После успешной калибровки колёса должны соответственно реагировать на ручки газа и тормоза. Без нагрузки колёса могут в диапазоне высоких оборотов начинать вращаться рывками, если Вы применили в настройках ослабление поля. Это так называемая “отсечка” от превышения максимальных оборотов. При торможении колёса вращаются “туда – обратно” и не успокаиваются. В вывешенном состоянии колес это нормально, под нагрузкой такого не будет.
Если калибровка прошла успешно и контроллер не издает звуковых сигналов ошибки, но при этом колёса не крутятся либо крутятся медленно/с посторонними звуками, возможно необходимо подобрать правильную комбинацию фазных проводов/сигнальных проводов с датчиков Холла.
Это не все возможные настройки, а только основные которым обязательно нужно уделить внимание.
Не стесняйтесь поддержать автора этой статьи, если она оказалась полезной для Вас!
Заказать готовую прошитую плату с нужными настройками
Если Вам нужна уже готовая прошитая плата, но по какой либо причине не хотите заниматься прошивкой самостоятельно, Вы можете заказать её здесь.

Гироскутер – вещь, несомненно, полезная, но в некоторых случаях сложно поспорить, что вместо него лучше было бы иметь какое-то другое средство передвижения. Выбрасывать старенький двухколесный агрегат жалко, а перепродать за такую цену, чтобы можно было купить другой вид транспорта, вряд ли получится. Народные умельцы во многих случаях занимаются не торговлей, а переделкой механизма своими руками – благодаря этому можно сделать так, чтобы транспорт изменился до неузнаваемости. Рассмотрим, что можно сделать из гироскутера.


Электросамокат
Один из популярных вариантов переделки гироскутера – изготовление на его базе самоката с самостоятельным ходом. Такой агрегат не требует от пассажиров столь же высокой способности удерживать равновесие, в этом плане он даже проще, чем велосипед, потому востребован.

Следует уточнить, что в большинстве случаев для изготовления электросамоката нужен самокат обычный – именно он будет основой для будущего агрегата.
От самого гироскутера используется только мотор-колесо – в идеале оно должно быть того же диаметра, что и самокатное. Специалисты советуют сначала выполнить заднюю вилку для мотор-колеса из древесины или плотного картона – так вы сможете сразу увидеть свои ошибки. А полноценную деталь, изготавливаемую из надежной квадратной трубы, будете делать уже по заранее проверенному образцу.

После того как металлическая вилка будет разрезана, сварена и отшлифована, на нее болтами и гайками устанавливается кронштейн. При этом надо предусмотреть подачу напряжения на бесщеточный двигатель – без контроллера ваш самокат так и останется обыкновенным, а не электрическим. По мощности контроллер должен соответствовать двигателю. Чаще всего его монтируют на задней вилке, а значит, нужно проложить проводку вдоль рамы к ручке газа, при этом провода обычно фиксируются пластиковыми креплениями. В удобном месте в систему следует вмонтировать разъем для зарядного устройства.

Литиевые батареи будут хранить заряд электросамоката, их можно устанавливать как параллельно, так и последовательно. Чрезмерный заряд грозит в лучшем случае быстрым износом батарей, потому нужно дополнительно установить контроллер BMS – он не допустит превышения емкости.

Собранную конструкцию следует аккуратно испытать в условиях помещения, оберегая от попадания грязи и пыли. Если получившийся самокат работает исправно, и претензий к нему нет, нужно позаботиться о защите основных узлов от грязи и влаги. Крышку лучше всего изготавливать из 2-миллиметрового листа алюминия по шаблону, предварительно выполненному на картоне. Чтобы не портить дизайн агрегата, крышку перед монтажом на саморезы выкрашивают в цвет, который логично вписывается в цветовую гамму транспортного средства.

Детская машина
Обыкновенный гироскутер для маленького ребенка может оказаться слишком сложным испытанием на способность держать равновесие, да и не сможет он увези сразу двух пассажиров. Кто-то из изобретательных родителей однажды понял, что на базе гироскутера можно соорудить небольшой электромобиль – мало того, что конструкция окажется значительно более устойчивой, так еще и мест в ней два вместо одного!


При этом ширина задней оси может быть намеренно увеличенной по сравнению с шириной гироскутера – так повышается устойчивость машинки и минимизируется риск аварии. Далее из профильной трубы сваривается каркас будущего электромобиля с заделом под переднее и заднее сиденья. Заднее сиденье обычно возвышается прямо над задними колесами, в его опоры встраиваются амортизаторы, призванные смягчать тряску для обоих пассажиров. Переднее сиденье водительское, оно теоретически должно быть более удобным, потому для его изготовления обычно используют уже готовый вариант сиденья со спинкой от чего-либо.

Сваренный каркас примеряется к гироскутеру, и если с ним все в порядке, мастер переходит к следующему этапу – окончательной подгонке, шлифовке швов, зашкуриванию любых травмоопасных зазубрин. После этого необходимо наварить пол из толстого слоя листового металла, способного выдержать вес двоих детей. Предпочтение во всех случаях отдается алюминию, ведь при своем малом весе он довольно прочен и способен выдержать массу пассажиров, не создавая чрезмерной нагрузки на двигатель гироскутера. После того как дно будет наварено, можно приступать к покраске для придания изделию декоративного вида.


Детский велосипед без контроллера
В некоторых случаях оригинальный гироскутер настолько старый и изношенный, что заниматься обновлением его электронных узлов просто нет смысла. В таком варианте он подлежал бы разве что отправке на свалку, но опытный человек с руками способен использовать его более логично – в качестве детали для изготовления детского велосипеда. Подобная конструкция, ввиду отсутствия контроллера и батарей, будет представлять собой транспорт, приводимый в движение только усилиями ног маленького пассажира, но тот все равно наверняка обрадуется.
Гироскутер может не подвергаться никаким конструктивным изменениям, хотя не возбраняется вынуть из корпуса все лишнее – раз батареи и контроллеры не будут использоваться по назначению, пусть не добавляют транспортному средству лишнего веса. В остальном это уже готовая задняя ось с присоединенными к ней колесами.
Задачей умельца является поиск старого или приобретение нового переднего колеса с педалями, которое заменит новому транспортному средству отсутствующий мотор. Имея перед глазами заднюю ось с колесами и переднее колесо с педалями, можно составить примерный чертеж рамы, так чтобы она подходила маленькому пассажиру по росту. Для изготовления каркаса лучше всего использовать алюминиевые профильные трубы, поскольку они одновременно очень прочные и легкие – значит, ребенку не придется прикладывать огромных усилий, чтобы поехать.

Если вы никогда не имели предварительного опыта конструирования столь сложных механизмов, можно попробовать сначала выполнить все детали из более податливых материалов вроде древесины. Примерив все, что получилось, вы увидите свои помарки, если таковые есть, или же получите готовые шаблоны, позволяющие более точно нарезать алюминий.


Вырезав необходимое количество деталей, сварите их, еще раз примерьте к гироскутеру и переднему колесу, с которыми их нужно будет скрепить шурупами или сварными швами. Все поверхности должны быть аккуратно зашлифованными. Если у вас возникли сложности с изготовлением отдельных узлов велосипеда, их можно докупить в магазине (особенно это касается сиденья), но этот момент желательно предусмотреть заранее, иначе не факт, что вы сможете подогнать свою сварку под заводские комплектующие.

Испытайте конструкцию сначала без ребенка – проверьте, нормально ли прокручиваются педали, не является ли ход слишком тугим, удобно ли поворачивать руль.
Различные дополнительные приспособления вроде фар, корзинок или тормозов 3-колесному детскому велосипеду не нужны, но для большинства малышей принципиально, чтобы их транспортное средство выглядело красиво, потому окрасьте каркас велосипеда яркими красками.

В следующем видео вы сможете наблюдать пример создания машины из гироскутера.
Я давно хотел обзавестись каким-либо электротранспортом. Еще с момент его первого появления. На сколько я помню, первыми из того, на чем можно было попробовать покататься в парке, были сигвеи. Естественно, что о покупке нельзя было и мечтать, да и размер первых моделей был сильно велик, и обслуживание - очень дорогое.
Сильно позже, когда встретить на улице человека на моноколесе или электросамокате стало обычным делом, я стал активнее присматриваться к тому, что стоит преобрести. Но выбор так и не сделал: электровелосипед казался плохой заменой обычного велосипеда - теряется весь спортивный его смысл, а покупать электросамокат или моноколесо, просто чтобы один раз попробовать, не хотелось - добираться до работы на них было затруднительно, а станция метро находилась рядом.
И вот, когда прошло еще некоторое время, и переехав за город, я вернулся к мысли покупки. Тут уже и с хранением пробоем нет, да и кататься можно просто "по фану" на природе.
Самое недорогое и распространенное, что сейчас продается - гироскутеры. Около 10000 руб за новый и 3000 - 5000 руб - на вторичке. Причем в данном случае купить б/у - не значит обязательно напороться на что-то совсем убитое, потому что многие купили гироскутер детям, которым он быстро надоел, и он так и лежал где-нибудь на балконе, пока не было решено его продать.

Единственный момент, на который нужно обратить внимание - состояние аккумулятора. Если он долго лежал без дозарядки, то велик шанс, что батарея умерла. Но новую купить не проблема - цена - 2000 руб, а сам гироскутер тогда можно купить еще дешевле.
Однако кататься на нем я не собирался (пробовал - не мое, да и при сбое электроники велик шанс резко полететь вперед). Я сразу подумал, что это - идеальный вариант для переделки во что-то, например, в электросамокат. Ведь за небольшую стоимость вы получаете два моторколеса, контроллер и какой-никакой аккумулятор.
Единственное - что с управлением? Погуглив эту тему, я понял, что вариант два: интегрировать в ручку газа плату с акселерометром, либо перепрошивать контроллер под ручку газа, которую купить отдельно.
Я выбрал первый вариант. Объясню почему. Я решил попробовать сделать максимально бюджетный электросамокат, при этом с неплохими характеристиками. Да, управление пострадает, будет не таким удобным, тем более интереснее попробовать. Также тормоза при таком управлении не нужны: тормозить самокат будет за счет поворота ручки газа обратно, а при наклоне в обратную сторону будет даже задний ход :)
Итак, решено, выбираем подопытного.
Покупка б/у гироскутера
Бюджет на покупку б/у гироскутера я определил в 5000 руб. Но при этом мне была нужна максимально живая батарея, чтобы я мог без вложения заняться разработкой, и была возможность проверять ходовые качества.
Нашел я вариант на авито во вполне хорошем состоянии и отличной батарейкой, при этом с моторколесами мощностью по 400Вт, что очень неплохо. Покрышки колес были из цельной резины (как на велосипеде "Дружок") - не нужно было заморачиваться с подкачкой, но позже я понял, что лучше было бы выбрать все-таки камерные колеса, так как самокат делал максимально дешевый и без амортизаторов, из-за чего сильно чувствуются ямки и выбоины в асфальте. Но об этом позже.
Разборка и подготовка
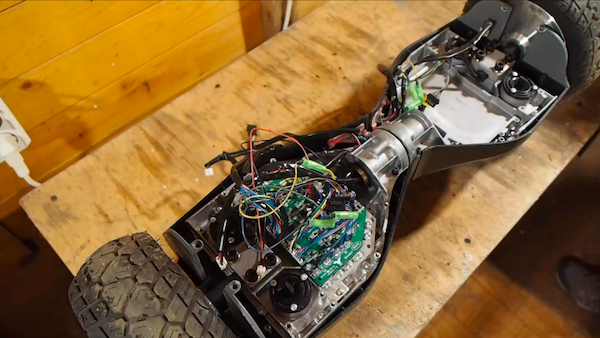
При разборке основной момент — это сохранить информацию о том, какие провода куда подключены. Можно либо пометить наклейками на сами провода и разъемы, либо нарисовать схему - кому как удобнее. Разбираем все, что есть, в итоге получаем 3 платы (одну большую - сам контроллер, и две - с двумя акселерометрами), части пластикового корпуса и основную несущую часть из какого-то сплава. В пластиковый корпус вклеены задние и передние световые сигналы - их я не стал извлекать, так как фару, если и буду ставить, то куплю отдельную.
Единственное, что нам понадобится из световых приборов — это световые индикаторы, сигнализирующие о состоянии гироскутера (точнее уже будущего самоката). Они показывают состояние батарей, а также, если с электроникой какая-то проблема, то по цвету и частоте мигания светодиодов можно понять, в чем именно проблема.
Также из металлической основы нужно выпилить два крепления моторколес.
Корпус
Корпус я делал из металлического профиля 40х20 и небольшого куска 60х40, просто потому что это было в наличии. Сделать корпус можно из чего угодно, главное, чтобы он выдерживал нагрузку. Если вы так соберетесь делать примерно по моей схеме, то нужно уметь хорошо и надежно варить.
Руль и рулевую трубу я взял от старого детского велосипеда, при этом сильно увеличил высоту руля, чтобы не уставала спина.
Также желательно уделить внимание общему весу конструкции, так как чем легче он будет, тем более резво будет набирать скорость, а также просто удобнее будет его перевозить и таскать, когда села батарея. Идеальный вариант - толстый алюминий, но это не вписывается в идею проекта сделать дешевый электросамокат, а также варить алюминий сложнее и дороже.
Итак, рамку нижней части (являющейся коробкой для аккумуляторов и контроллера) я сделал из профиля, нижнюю крышку - из оцинковки. Она и легче, и не ржавеет, и в два слоя вполне надежна. Верхняя крышка - лист металла 3мм. Размеры могут быть любыми, я исходил из того, чтобы было удобно стоять, а также чтобы внутрь поместился контроллер и 3-4 стандартных батареи для гироскутера.
Для крепления моторколес используются выпиленный из гироскутера крепления, которые идеально и надежно прикручиваются к профилю 40х20. Их нужно крепить особенно надежно.
Электрика

Практически все подключается так же, как и было подключено, за одним исключением: нужно оставить только одну плату с акселерометром. Иначе, даже при объединении двух плат, есть шанс, что колеса будут крутиться с разной скоростью, что чревато падениями. Сделать это не сложно: нужно все провода, которые идут от контроллера к платам акселерометра, спаять параллельно (соответствующие цвета) и подключить к одной плате (любой из двух, лучше той, которая с модулем bluetooth).
Итак, далее все просто, требуется:
- Удлинить провода от моторколес, чтобы они дотягивались до контроллера. Для переднего колеса нужно оставить большой запас провода, чтобы при повороте руля он не натягивался и не перетирался.
- Дотянуть проводку от платы акселерометра (от руля) до контроллера
- Вывести на руль кнопку включения/выключения (не обязательно, но так удобнее)
- Вывести на руль разъем зарядки (тоже не обязательно)
Так как плата акселерометра будет на руле (на ручке газа), то модуль светодиодов состояние гироскутера будет также рядом.
В дополнение к этом я купил вольтметр, припаял его параллельно батареи и также протянул на руль
И еще один важный момент: на платах акселерометра обычно есть датчики, которые включают/выключают гироскутер, когда вы наступаете/спрыгиваете с него. Работают они на основе фоторезисторов. Так вот, фоторезисторы нужно плотно упаковать в термоусадку. У меня был момент, когда я этого не сделал, когда самокат отказывался ехать при попадании солнечного света на плату. Некоторое время ушло, пока я понял причину глюков :)
Я также впаял выключатель в разрыв линии с фоторезистора. Управление самокатом очень специфичное, при включении он сразу начинает ехать, потому что сложно на глаз установить плату заранее параллельно земле, поэтому выключатель необходим, и установить его лучше как можно удобнее и ближе.
И не стоит изолировать и закреплять все провода, пока вы не проверили, что все работает. Иначе велик шанс, что все придется разматывать. Кстати, для объединения проводов в один я нашел удобную оплетку - справа на нее ссылка, как и на остальные используемые запчасти.
На счет аккумулятора: на одной зарядке мой самокат проезжает порядка 6км. Я установил второй. Самой просто способ - просто установить внутрь вторую батарею и когда сядет первая - подключить вторую. Если же вы хотите подключить одновременно обе батареи, то, во-первых, нужно установить диоды (чтобы заряд не переходил с менее севшей батареи на более севшую), а также не будет работать штатная зарядка гироскутера.
Ручка газа
На счет самой ручки. Нужно изготовить корпус для платы, который бы был соединен с ручкой газа. При повороте ручки газа плата должна наклоняться. Я использовал 3d-принтер и напечатал корпус, но можно было бы использовать грипсу от старого велосипеда и распаячную коробку подходящего размера.
Как я уже писал выше, лучше сделать кнопку включения/выключения, а также не стоит пытаться ехать на самокате, пока вы надежно не зафиксировали плату акселерометра:
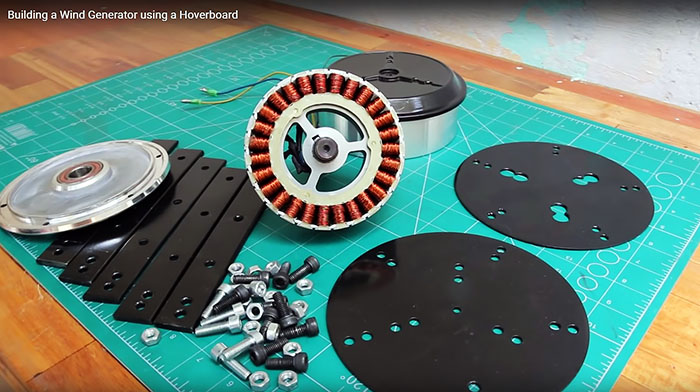
Мотор-колесо и другие детали от старого гироскутера станут оптимальной основой для изготовления ветрогенератора. В качестве хвоста используются фанера, а лопасти вырезаются из ПВХ трубы. Такой ветряк способен вырабатывать мощность до 150 Вт при скорости ветра 5-7 м/с.

Материалы и инструменты:
- гироскутер с рабочим мотор-колесом;
- 6-дюймовая труба ПВХ;
- оцинкованная труба диаметром 3 дюйма;
- 5-миллиметровые круглые металлические пластины;
- дюймовые металлические полосы;
- фанера;
- болты и гайки;
- ручная дрель;
- выпрямитель;
- углошлифовальная машина;
- лобзик;
- плоскогубцы;
- паяльник.
Процесс изготовления
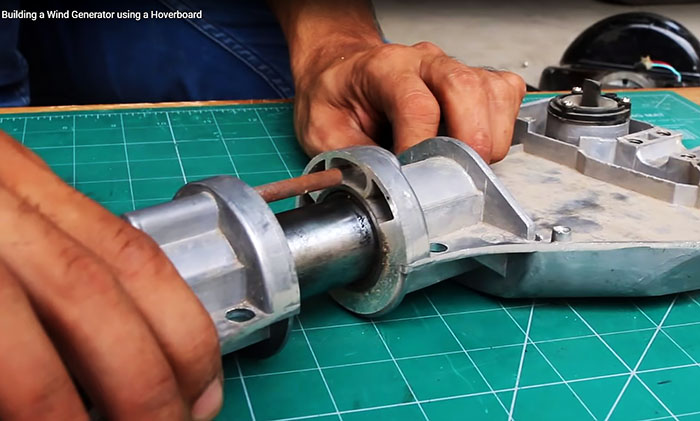
Сначала необходимо разобрать гироскутер, выкрутить все болты и вытащить мотор из корпуса с помощью плоскогубцев. Потребуется приложить значительное усилие, конструкция закреплена довольно сильно.
Далее, изготавливаем переходник-держатель. Из пластины выкраиваем 2 круга и нарезаем 5 полос. В заготовке просверливаем отверстия, как показано на рисунке.
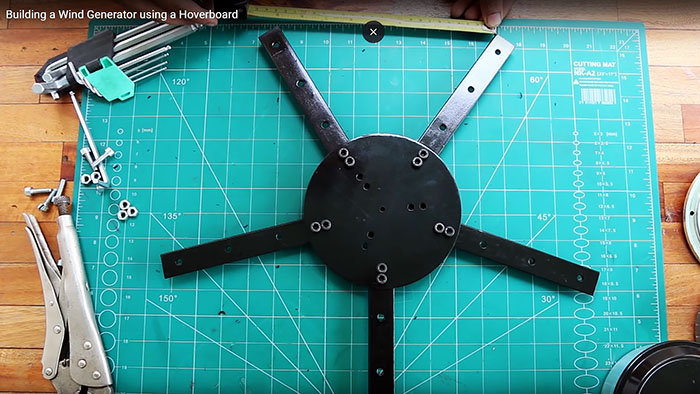


Переходником между хвостом и вертушкой станет еще одна пластина. На ней также высверливаем отверстия для закрепления хвоста, лопастной части и поворотного механизма.
В качестве поворотного механизма используем еще одну деталь гироскутера – шарнирную часть. Для этого разрезаем корпус и демонтируем шатун.

Для крепления поворотного механизма и основной конструкции ветряка используем 2 металлические пластины. Одну из пластин привариваем к монтажному столбу на крыше. Вторая пластина устанавливается на шатуне.




Берем ПВХ-трубу и вырезаем лобзиком 5 лопастей. Каждое крыло выпиливается с расширением. В нашем случае самая узкая часть имеет ширину 5 см, а широкая – 12,5 см, длина чуть больше метра.
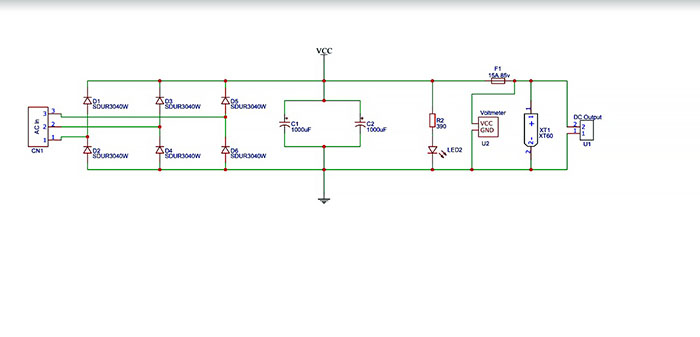
Трехфазный мотор-колесо генерирует трехфазный переменный ток. Для преобразования переменного тока в постоянный подсоединяем к движку выпрямитель, который построен по указанной схеме.

Проводим монтаж ветрогенератора на крыше. В качестве опоры используем оцинкованную трубу с металлической пластиной наверху. Для крепления нижней части берем металлические кронштейны.
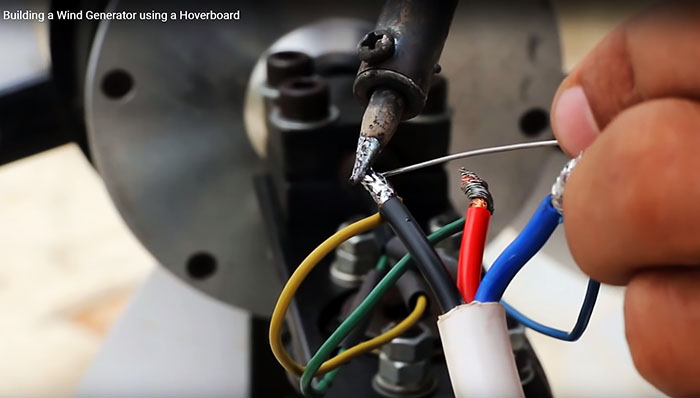
Устанавливаем ветрогенератор на опоре и подсоединяем к батарее на 12В. Заряд к АКБ поступает при вращении ветряка.
Смотрите видео
Моя вторая прошивка где два режима работы, с накатом и с электронным тормозом, можно менять без перепрошивки.
собираю и модернизирую этектротрайк на моторколесах от гироскутера так же вы можете купить подобные моторы на .
Всем привет! Сегодня я покажу свой гиротрайк! Это трайк из гироскутера и велосипеда, который сделал мой папа.
Эта простая самоделка, очень помогает в быту, и ничего не требует, кроме своевременной зарядки аккумулятора. очень .
Здорова. В этом видео я сделаю трайк используя мотор колёса и контроллер от гироскутера. Контроллер перепрошит на .
Сделал ребенку трайк из гироскутера и трехколесного велосипеда. При желании за пару минут гироскутер можно .
Аккумулятор 6000 млА/ч: ali.ski/yCmQI Контроллер: ali.ski/7tlD-p Ручка газа: ali.ski/BLLFp Амортизатор: .
instagram: baikalrobotics Апгрейд детского трайка с гироскутером в качестве донора. Так же прошиваем .
трайк из гироскутера в Москве, мощность 2х500Вт, диаметр колеса 10" В основу устройства вошёл гироскутер .
Парнишка захотел и собрал себе электротрайк из гироскутера. Конструкция получилась простой и комфортной несмотря .
Спасибо дорогие подписчики, и гости за просмотр. Подписывайтесь на мой канал, ставьте лайки, дизлайки, коментируйте .
Теперь и у Нурлана есть свой трайк.Пока с одним контроллером и не такой резвый,но по скорости не уступает трайку .
Здравствуйте. В этом видео есть схема подключения электроники трайка на базе гироскутера. Подробное видео про пайке .
У меня новый бзик, ребята!))) Решил пересаживаться на электротягу!))) Что из этого получится - посмотрим вместе.
Читайте также: