
Трехосевой подвес своими руками
Добавил пользователь Евгений Кузнецов Обновлено: 04.10.2024
Это самый дешевый самодельный 3-х осевой стабилизатор для GoPro который только можно соорудить. При этом .
В новой серии сериала о постройке квадрокоптера мы установим на нашего винтокрылого монстра двух осевой подвес .
Я Вас приветствую мои дорогие друзья на моём канале! В этом ролике я покажу вам как можно изготовить хороший подвес .
Самый легкий 2-х осевой подвес для квадрокоптера Syma X8 и его быстрая, подробная и правильная настройка 2-х .
В этом видео я решил показать, как можно сделать переноску для дичи или как её ещё называют Торока своими руками.
Удобный и быстрый способ изготовления подвеса из паракорда для манков. Просто и понятно. Муфта пвх 32 мм, паракорд .
Отличный подвес, но нужно настраивать. При резких поворотах подвес дрожит. Покупал здесь (появились облегчённые .
Очень много видео про то, как сделать своими руками такой стабилизатор и мало в каких действительно хорошо показана .
Ремонт динамика. Изготовление и замена подвеса своими руками. Подвесы из китая - ali.ski/NFQPlC Группа VK .
подвес для ружья разгружает руки, облегчает ходовую охоту, охоту в застреле, на номере и вообще удобная вещь.
. подвес на динамик. подвес на динамик ремонт подвеса динамика подвес динамика своими руками самодельний подвес .
Даже если вы не планируете заниматься аэросъемкой на серьезном уровне, создавать карты в формате 3D или заниматься такими вещами, как исследования с помощью лазерного дальномера (Lidar) и создание изображений определенных объектов с помощью датчиков, вам, как будущему коптероводу наверняка будет интересно узнать, как работает съемочная система на дронах компании DJI, а в особенности как устроена и функционирует ее знаменитая система стабилизации на подвесах для воздушных камер.
Без работающей технологии стабилизации DJI даже любительская воздушная съемка не принесет большого удовольствия из-за потери качества, ведь летающая камера снимает в более экстремальных условиях, чем наземная. Что уж говорить про решение комплексных задач профессионального порядка, когда требуется предельно высокое качество, детализированность и плавность кадров. Современные системы стабилизации должны идти в ногу с инновациями в области беспилотных летательных аппаратов и быть совместимыми с ключевыми компонентами, например, полетным контроллером, чтобы функционировать эффективно и адекватно ситуации.

Подвес с камерой X7
Неважно, будете ли в будущем серьезно заниматься воздушной кинематографией или профессиональными съемками, небольшой обзор – введение в конструкцию систем стабилизации DJI поможет вам лучше понимать работу своей летающей камеры, даже если она относится к любительскому классу. В конечном счете, кто знает, может быть вам захочется чего-то более серьезного, чем съемки для своего аккаунта в Facebook/Вконтакте или личного видеоблога. И этот обзор поможет вам правильно выбрать лучший подвес для воздушной камеры. Наконец, вы сами начнете понимать, как работает вся система и научитесь устранять возникающие проблемы.
Помимо таких важных вещей, как 3-осевые бесколлекторные двигатели, блоки управления подвесом (GCU), инерциальный измерительный блок (IMU) и антивибрационные системы, вы узнаете еще много полезного для своей будущей работы с воздушной камерой.
Для чего предназначены системы стабилизации воздушной съемки?
Основная задача подвеса с системой стабилизации, устанавливаемого на квадрокоптер, дать оператору (пилоту) возможность фотографировать или снимать видео без влияния на качество кадров вибрации или дрожания камеры. Внешние воздействия на съемочную систему возникают в ходе маневров дрона в воздухе, из-за работы двигателей и пропеллеров, а также от воздействия ветра или других внешних факторов.
Как правило, на подавляющем большинстве моделей коптеров камера может двигаться по желанию оператора. Если для работы камеры используется специальный подвес вроде DJI Zenmuse или DJI Ronin-MX, то возможностей для съемки становится еще больше, поэтому такие комплексы активно применяются для профессиональной съемки.
За кулисами фильма “Оперный театр Астаны”. Съемки с квадрокоптера DJI Inspire 2 с установленной на нем камерой и подвесом DJI Zenmuse 7
Виртуозная работа камеры обеспечивается, кроме всего прочего, идеальной работой 3-осевого подвеса со стабилизацией, который с помощью своих трех бесколлекторных двигателей может регулировать положение камеры по трем осям (панорамирование, поворот, наклон) после команды оператора. В то же время инерциальный измерительный блок (IMU) реагирует на движение и использует три специальных двигателя для стабилизации камеры.
Однако чистой механики, пусть и очень совершенной, недостаточно для эффективного функционирования подвеса в столь сложных условиях. поэтому на помощь приходят алгоритмы, позволяющие стабилизатору замечать разницу между преднамеренным движением камеры по команде с пульта или мобильного устройства (панорамирование или съемки в движении) от непреднамеренного движения, вызванного вибрацией или тряской во время маневра. Алгоритмы помогают стабилизатору заставить камеру работать плавно без дерганий и тряски.
Революция в управлении воздушными камерами
Буквально за пару последних лет система управления беспилотниками и воздушными съемочными комплексами пережила быструю эволюцию, если даже не революцию. Еще несколько лет тому назад вы могли управлять камерой, установленной на дрон, весьма ограниченно. Никакого тотального контроля! Оператору часто приходилось сначала включать камеру еще до взлета и ставить ее на запись. Ну а менять положение или другие настройки камеры – об этом нечего было и говорить. По сути, после взлета дрона вы, как оператор, почти полностью теряли контроль над камерой.
Сейчас этого нет и в помине. Все последние модели беспилотников в том или ином виде оснащаются системами стабилизации и подвесами. Камера и подвес контролируются пилотом (а порой даже вторым оператором через ведомый пульт), так как их система управления интегрирована в общую систему управления беспилотником. Вы можете легко управлять всем или отдельными элементами комплекса с земли с помощью пульта или мобильного устройства (смартфона или планшета). Камеру можно использовать для живой трансляции, причем не только в видеохостингах и социальных сетях, но и с помощью дополнительных устройств прямо на телеканале (последний вариант очень подходит для современных журналистов). Появились и другие интересные функции, о которых можно рассказывать отдельно.
Из каких компонентов состоит подвес?
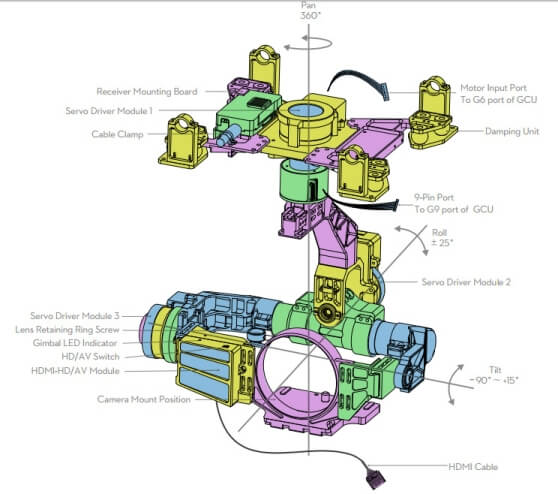
Схема подвеса со стабилизацией DJI.
Модули трех сервоприводов (Servo Driver Modul) располагаются в различных частях подвеса и отвечают за определенные движения системы во время съемки. В верхней части подвеса видны амортизаторы вибрации (демпферы)
На схеме выше изображен подвес DJI Zenmuse Z15-5D III (HD), который можно использовать для установки на него камеры Canon 5D Mark III. По своему устройству большинство современных моделей подвесов напоминают Zenmuse Z15. Поэтому, если вы разберетесь в этих компонентах, вы поймете устройство и других моделей подвесов для беспилотников.
В чем разница между 2- и 3-осевыми подвесами?
Главное отличие в качестве съемки, так как 3-осевые подвесы обеспечивают лучшую стабилизацию при видеосъемке по сравнению с 2-осевыми подвесами. Причина проста. В то время как 3-осевые модели стабилизируют по трем осям (рыскание, тангаж и крен), двухосевые подвесы только по оси тангажа и крена.
Если у подвеса имеется 3-осевая стабилизация, то он способен либо значительно уменьшить, либо даже полностью устранить эффект “желе”. Это происходит за счет работы третьего двигателя, поглощающего нежелательные движения по оси рыскания. Правда, у трехосевых подвесов есть и недостатки: больший вес и цена, большее потребление энергии из-за наличия своих двигателей.
Как работает “механика” подвеса?
Для движения подвеса используются три модуля с сервоприводами (для панорамирования, поворота и наклона системы). Как правило, DJI и другие производители изготавливают подвесы, включая их компоненты, с учетом особенностей конкретных камеры (обычно рекомендованные модели указываются особо) и матрицы. Такой подход к конструкции должен обеспечивать идеальную съемку, ведь подвес уже “заточен” на вес и баланс конкретной камеры.
Почти все современные подвесы для беспилотников работают (точнее, приводятся в движение) благодаря бесколлекторным (бесщеточным) двигателям. Отличие бесколлекторного двигателя от коллекторного (щеточного) заключается в принципе подачи электрического тока на коммутатор или электромагниты, заставляющие вращаться ротор. Поскольку в бесколлекторном двигателе нет щеток, то передача тока и вращение ротора происходит не механически посредством щеток (как в коллекторном), а с помощью электроники и без физического контакта.
Обычному пользователю может показаться, что именно отсутствие щеток и физического контакта – это базовое отличие двух моделей электродвигателя, однако это не совсем так. Важным элементом является наличие электромагнитов по периметру ротора, о чем уже упоминалось. Они могут располагаться в виде крестовины. Благодаря такой конструкции обеспечивается эффективность бесколлекторных двигателей и экономится питание.
Как подвес дрона двигается по осям?
- Панорамирование (рыскание): движение рыскания – это боковое движение подвеса/камеры влево или вправо. У большинства подвесов для беспилотников имеется движение на 360 градусов. Если ваш дрон оснащен убирающимися шасси, то такое устройство предоставляет для камеры на подвесе полный круговой обзор на 360 градусов. Например, дроны DJI Inspire 1 и DJI Inspire 2 оснащены поднимающимися “лучами” с шасси, позволяющими камере производить съемку в любом направлении.
- Крен: положительный угол крена поднимает подвес / камеру влево или вправо. Zenmuse Z15 выше имеет + / -15 градусов крена.
- Наклон (тангаж): движение подвеса и камеры вверх и вниз. На приведенной выше схеме подвеса видно, что она имеет диапазон перемещения от -90 до +15.
Амортизатор вибраций (демпфер)

Конструкция демфера подвеса DJI Zenmuse X5
Если вам придется когда-либо разбирать подвес или увидеть его в разобранном виде, то вы обязательно обратите внимание на пластину со специальными элементами из резины, напоминающими что-то вроде рессор или амортизаторов. Это и есть один из важнейших компонентов современного подвеса – амортизатор вибраций или демпфер.
О важности этого блока говорит круг задач, которые он призван выполнять: снижать или демпфировать вибрацию средних и высоких частот, генерируемую дроном и направляемую к камере. При этом демпфер допускает низкочастотное движение пластины вместе с движением корпуса беспилотника. Если приходится менять этот элемент подвеса, то не стоит экономить, тем более, что его общая стоимость не такая уж и высокая. Качественные профессиональные демпферы изготавливаются с применением композитных материалов и качественной резины для амортизирующих шариков.
Что такое инерциальный измерительный блок (IMU) и для чего он нужен?
У большинства моделей современных подвесов, например, у линейки DJI Zenmuse, имеется встроенный инерциальный измерительный блок. Кроме того, у подвесов Zenmuse есть дополнительный встроенный инфракрасный модуль. Блок IMU работает на основе специальных алгоритмов, обеспечивающих не только полную стабилизацию съемочного процесса, но удобный и простой контроль над всей системой. Так как блок IMU уже встроен в подвес, то никакого дополнительного оборудования или проводки не потребуется. А это позволяет снизить вес и быстрее выполнять съемку. Например, вы можете дистанционно управлять затвором, используя инфракрасный приемник.
Возвращаясь к IMU, отметим перечень задач, которые оно призвано выполнять: измерение и передача информации об удельной силе тела, измерение и передача данных об угловой скорости, а иногда и о магнитном поле, окружающем тело. Выполняются данные задачи с помощью комбинации акселерометров и гироскопов, а также иногда с помощью магнитометров. В этом качестве данные, собранные с датчиков IMU, позволяют компьютеру отслеживать местоположение подвеса и летательного аппарата (подобные блоки устанавливаются на самолеты, дроны и другие устройства, а не только на подвесы).
Блок управления подвесом (GCU)
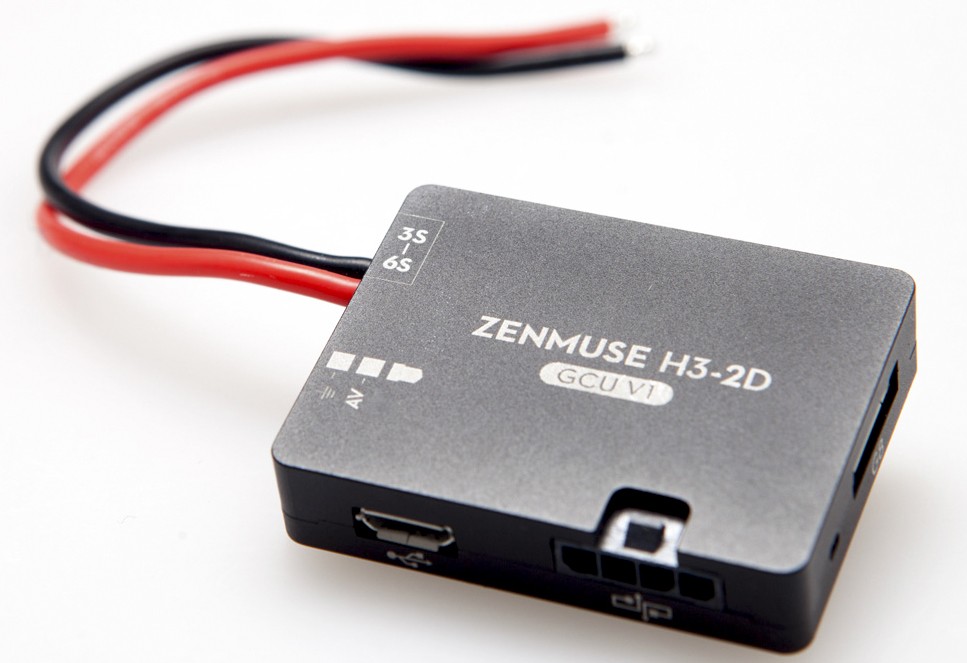
Блок управления подвеса Zenmuse H3-2D
Блок управления подвесом (GCU), по сути представляет вариант компьютера, получающего данные с гироскопов. На их основе оне передает команды на двигатели подвеса, указывая им, как нужно двигаться. Блок управления подвесом обычно подключается к системе управления полетом и активно с ней взаимодействует. Система управления полетом помогает контролировать работу подвеса. Одновременно блок управления отвечает за вывод видеоинформации на видеолинк для передачи видеосигнала. Системы управления полетом по-другому называют полетными контроллерами. У DJI выпущено уже несколько поколений таких устройств, например, DJI N3 и DJI A3.
Камеры и датчики
Все вышеперечисленные детали бесполезны без камеры или датчика для воздушной фотосъемки, видеосъемки или 3D-изображений. Подвес должен иметь специальные правильные крепления, винты и кабели для подключения камеры к подвесу и блоку управления.
Дополнительные компоненты для подвеса и камеры
Датчик телеметрии DJI IOSD Mark II
Для решения профессиональных задач пользователи могут дооснащать свою летающую платформу с подвесом и камерой различным оборудованием. Так часто делается в строительстве, геодезии и других сферах профессиональной деятельности, где требуются точные данные измерения наземных объектов с воздуха, составления карт и 3D-моделей объектов.
Например, пользователь может установить на свой дрон датчик телеметрии DJI IOSD Mark II, который взаимодействует с камерой и подвесом. Но его преимущество не только в эффективном выполнении прямых задач. В его конструкции имеется встроенный модуль BEC. С его помощью можно подключить батарею типа 3S – 6S LiPo, чтобы подавать питание на камеру и основной контроллер.
А поскольку такие устройства, как DJI IOSD MARK II, работают вместе с полетным контроллером, то вы получаете еще и дополнительные выгоды в виде стабильного пилотирования и уменьшения вибрации, которая может негативно повлиять на подвес и работу камеры.
Теперь вы знаете хотя бы в общем то, как устроены и как функционируют подвесы для летающих камер DJI. Какие же подвесы для съемки можно считать лучшими, об этом читайте в нашем специальном обзоре.

Сегодня я расскажу Вам о совершенно новом сайте Витебского клуба самодельщиков. Это группа единомышленников, делающих что-нибудь полезное своими руками.
Здесь вы, возможно, не найдёте декоративных украшений из бисера, но зато найдёте много советов по домашнему хозяйству, электронике, робототехнике и даже по строительству дронов!
F450: Дополнительное оборудование

Итак, после сборки и долгой настройки наш квадрокоптер полетел, полетел далеко и ровно, и даже по собственной программе без участия человека!
Теперь же нам захотелось использовать его для качественной видеосъемки с воздуха и для этого нам понадобится дополнительное оборудование, а именно:
Экшн-камера

Для съёмки видео с квадрокоптера идеально подходят различные Экшн-камеры! Они обладают целым рядом необходимых для этой цели свойств:
- Они небольшие по размеру
- Легкие по весу
- Относительно прочны и не имеют сложных механических деталей, следовательно устойчивы к падениям и ударам
- Производят запись на энергонезависимую Flash-память
- Обладают очень широким углом обзора, что делает ненужным точное прицеливание в определённую область
- Не имеют механизма автофокусировки а заранее настроены на некий усреднённый фокус
- Укомплектованы водонипроницаемыми боксами
- Некоторые модели обладают дополнительными удобными функциями: видео-выход, дистанционное управление, подключение к камере по Wi-Fi.
В качестве примеров могу предложить лично испытаные мною модели и конкретные магазины где я их покупал:
EKEN H9R — от 39$ (FullHD, 4K, пульт ДУ, Wi-Fi)
Подвес-стабилизатор

Это хитрое название обозначает не менее хитрое устройство с тремя электродвигателями и управляющей ими платой. Главное назначение такого подвеса — успокаивать все колебания и раскачки квадрокоптера, чтобы они не влияли на положение видеокамеры в пространстве.
Иными словами, квадрокоптер в процессе полёта в любом случае наклоняется и поворачивается: для разгона, торможения, для поворотов, и даже для компенсации случайно появившегося ветра.
В подвесе есть датчик горизонта на верхней его части (основании) и такой же на нижней площадке (на которой держится камера). Сравнивая показания этих двух датчиков, подвес выравнивает положение нижней площадки с камерой.
Подвесы бывают двухосевые и трёхосевые. Двухосевые имеют только два двигателя для корректировки по двум осям: Pitch (наклоны вперёд-назад) и Roll (наклоны направо-налево). В трёхосевых подвесах добавляется ещё и двигател по оси Yaw (повороты вокруг вертикальной оси квадрокоптера).
Вот пример, как работает двухосевой подвес на столе:
Общепринято, что видео снятное при помощи трёхосевого подвеса не нуждается в дальнейшей видеообработке.
Но о качестве видео судить Вам, вот такое видео снято мною без особой подготовки: Съёмка зоны отдыха на Витьбе. Снято камерой EKEN H9R на подвесе HakRC Storm32:
Важное замечание: Подвес нельзя включать без камеры, точно так же как и передатчик FPV нельзя включать без антенны.
Лично я использовал трёхосевой подвес HakRC Storm32 — около 50$.
Вот как работает трёхосевой подвес:
Системы FPV
Аббревиатура FPV означает First Person Vision — изображение от первого лица. Оборудование этого класса позволяет пилоту управлять летательным аппаратам наблюдая за изображением с бортовой камеры в прямом эфире, то есть как будто он при этом находится на борту!
По сути комплект FPV состоит из воздушной и наземной части. На летательном аппарате размещается камера и передатчик, а на земле, соответственно, приёмник и экран (или шлем/очки).
Камеры бывают совмещённые в одном корпусе с передатчиком и отдельные. Так же и приёмники бывают отдельные от экранов и в одном корпусе. Разные формы антенн дают разные результаты в дальности передачи изображения.
OSD — показатели приборной панели на изображении
Аббревиатура OSD расшифровывается как On Screen Display. Прибор с таким названием накладывает на изображение FPV-камеры показатели приборов контроллера полётов. Наиболее важные из них — количество пойманных спутников, текущая высота, горизонтальная скорость, компас, остаток заряда батареи, географические широта и долгота и многие другие.
F450: Первые полёты

Продолжая уже описанную тему, расскажу о своих успехах и неудачах в дальнейшей эксплуатации самодельной авиамодели, как и раньше, заостряя внимание только на нестандартных вещах, не описанных другими интернет-источниками.
Итак, собранный квадрокоптер был тщательно настроен при помощи Mission Planner, конечно не без нюансов (но о них позже) и вынесен в поле.
При первых двух запусках квадрокоптер не взлетал а просто падал на бок! В результате — поломанные пропеллеры и лучи рамы.
Заказанные из Китая детали ждать приходилось очень долго, поэтому заказывал я их заранее и в бОльшем количестве чем необходимо (про запас). Также, мне очень помогли ребята из студии 3D-печати 3DADA. Они печатали мне пропеллеры и лучи рамы, спасибо им за помощь!
Причину опрокидываний я искал очень долго. На первый взгляд ошибка могла быть в порядке подключения двигателей либо в расположении центрального контроллера полёта относительно носа летательного аппарата. Действительно, при наклоне квадрокоптера, например влево, контроллер полёта должен дать больше газа именно на два левых двигателя чтобы выровнять летательный аппарат. А при неправильном порядке подключения моторов повышенный газ пойдёт на неправильный двигатель, что и приведёт к перевороту аппарата. Такая же ситуация случится при неправильной ориентации полётного контроллера (именно в нём установлены гироскопы и акселерометры) относительно носа летательного аппарата: неправильно сориентированный контроллер не сможет правильно определить наклон аппарата.
Однако тщательные проверки показали что в этих двух позициях ошибок нет, и тщательный анализ видеозаписей полётов показал проблему:
Главная проблема — крепление пропеллеров
Дешевый безщёточный двигатель A2212 имеет на выходе гладкий вал, на который надевается крепление пропеллера.
Крепление имеет гладкую голову и очень трудно зажимается без дополнительных инструментов, а надёжность его крепления на валу напрямую зависит от силы зажатия. Кроме того, крепления всех четырёх пропеллеров одинаковые, с обычной правой резьбой, и зажимаются по часовой стрелке. А мы с вами помним, что на любом квадрокоптере есть две пары пропеллеров, вращающихся В РАЗНЫЕ стороны! Пропеллеры, вращающиеся против часовой стрелки своим вращением зажимают крепление ещё сильнее, а двигатели вращающиеся по часовой стрелке — стремятся раскрутить крепление.
И вот, в результате ослабления креплений левого переднего и правого заднего двигателя, пропеллеры проворачивались на валу и контроллер не мог выровнять аппарат в горизотальное положение! Результат — крен в сторону конкретного двигателя (луча), падение и крушение.
Ситуацию спас автомобильный фиксатор резьбы в тюбике и тонкая отвёртка для закручивания гайки. Правда это очень усложнило установку и съём пропеллеров, а это удобная функция для транспортировки аппарата.
Поиск по просторам интернета подсказал более качественное решение этой проблемы, но и более дорогое: Двигатели подороже не требуют отдельных креплений для пропеллеров, а имеют резьбу прямо на валу. Правую и левую соответственно. Также такие двигатели укомплектовываются гайками для зажима пропеллеров — с правой и левой резьбой.
Проблема 2 — компас
Доработки.
Постепенно все приколхоженные самостоятельно крепления были заменены на заказные, заботливо изготовленные китайцами, также двигатели были заменены на новые, но об этих улучшениях пожалуй расскажу в следующей статье.
F450: Сборка

Итак, получив посылку из Китая с набором комплектующих для сборки квадрокоптера у меня конечно же зачесались руки собрать всю конструкцию воедино! Даже несмотря на тот факт, что аккумулятор и аппаратура управления были ещё далеко в пути, а первый полёт без них всё равно был бы невозможен.
Сам процесс сборки, и даже настройки мультикоптеров, в интернете изучен и описан энтузиастами почти понятно и подробно, в том числе на видео. Именно поэтому я не буду подробно рассматривать все мелкие шаги, а остановлюсь на тех моментах, которые мне показались неочевидными или заинтересовали меня.
Прибыла посылка в небольшой коробке, размером приблизительно с лист бумаги А4, толщиной около 5 сантиметров. На почте посылку подмяли и даже чем-то проткнули, но содержимое коробки при этом не пострадало.
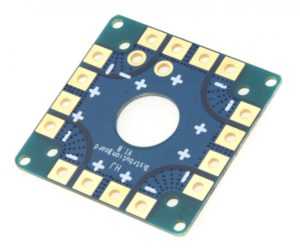
Дополнительная плата распределения питания из коробки
Начал я, по совету умудрённых опытом людей из интернета, с тех деталей, которые в последствии уберутся внутрь рамы: с разводки силовых проводов: от аккумулятора к четырём регуляторам оборотов двигателя. В коробке уже лежала специальная квадратная плата распределения питания, на которую можно аккуратно припаять все необходимые провода питания. Однако я решил ею не пользоваться, так как в нижней пластине рамы уже присутствует такая же разводка питания, а лишняя плата это лишний вес аппарата и лишняя деталь которая при вибрации может отвалиться и нарушить нормальную работу аппарата.

Контакты на плате необходимо залудить и припаять к ней силовые провода, соблюдая их полярность, а именно: провода аккумулятора, и четыре регулятора оборотов двигателя.

Следующим шагом я собрал раму: прикрутил винтами лучи к нижней пластине, а затем к этой конструкции добавил верхнюю пластину рамы. Головки винтов оказались под довольно мелкий шестигранник, поэтому рекомендую заранее позаботиться о наличии инструмента. Далее, зачистил от облоев места установки двигателей на лучах и привинтил двигатели на места. Удивило, что крепёжные резьбовые отверстия на днище двигателя расположены не на одинаковом расстоянии от оси вращения!

Отдельно пришлось задуматься о проблеме подключения двигателей к регуляторам оборотов. Среди владельцев квадрокоптеров есть сторонники двух способов этого соединения: пайка намертво, либо соединение на штекерах (в простонародии — бананы). Паяное соединение считается более надёжным, а на штекерах — более удобным в случае замены двигателя или сборки-разборки аппарата. Кроме этого, есть проблема стыковки проводов в этом соединении: из регуляторов выходит три провода с пометками A, B и C, а на входе двигателей есть три цветных провода: чёрный, красный и жёлтый. Как их соединять?
Из соображений балансировки всего аппарата, я старался размещать массивные детали как можно ближе к его геометрическому центру. Поэтому регуляторы оборотов (желтые детали на фото) я расположил не посредине луча, а ближе к площадкам рамы. А ещё, длина силовых проводов на регуляторах сделана с хорошим запасом, так что в вопросе взаимного расположения компонентов есть широкое поле для деятельности. Заранее обрезать провода впритык я не рискнул, побоялся что этот запас ещё понадобится. В результате получилось провисание излишка проводов, которые я стянул пластиковым хомутом, чтобы они не болтались и не попали в полёте в пропеллер. В дальнейшем, в случае удачного первого полёта, я планирую перепаять эти участки, убирая излишки проводов.
Похожим образом была решена и проблема с полётным контроллером. Главная функции подставки под этот контроллер — гасить вибрации, сохраняя при этом горизонтальное положение контроллера относительно рамы аппарата. Найденный в интернете вариант крепления на нескольких слоях двухстороннего скотча оказался слишком жёстким. Поэтому было принято решение посадить его на поролоновую губку и притянуть сверху канцелярскими резинками (или резинки для денег, как их называют).

Подключение всей электроники к контроллеру полёта особого интереса не вызывает, там всё просто. Минусовые контакты расположены по внешнему периметру контроллера. Приёмник аппаратуры управления закрепил на пластине рамы пластиковым хомутом.
С пропеллерами в комплекте идут шайбы разных размеров, которые позволяют им закрепиться на различных осях двигателей. Система крепления пропеллеров довольно проста, но пока не понятно почему на всех четырёх креплениях правая резьба. Неужели они не должны самостоятельно затягиваться?
Ну вот, по сборке вроде бы всё. Не знаю стоит ли расписывать процедуру настройки, она и так довольно широко представлена в интернетах. Скажу только для интересующихся, что всё производится при помощи программы Mission Planner. Она позволяет настраивать, калибровать и задавать маршруты нашему летательному аппарату. А её первые страницы дают понять, что базе этого контроллера можно построить не только квадрокоптер, но и совершенно разные летательные (и не только) аппараты!
Теперь, когда вы выбрали или спроектировали раму БПЛА, выбрали моторы, несущие винты, ESC и батарею, можно приступить к выбору полётного контроллера. Полётный контроллер для мультироторного беспилотного летательного аппарата представляет собой интегральную схему, обычно состоящую из микропроцессора, датчиков и входных/выходных контактов. После распаковки контроллер полёта не знает какой конкретный тип или конфигурацию БПЛА вы используете, поэтому изначально необходимо будет установить определенные параметры в программном обеспечении, после чего заданная конфигурация загружается на борт. Вместо того, чтобы просто сравнивать доступные в настоящее время полётные контроллеры, подход, который мы здесь использовали, перечисляет, какие элементы ПК отвечают за какие функции, а также аспекты, на которые необходимо обратить внимание.
Основной процессор

8051 vs AVR vs PIC vs ARM: Семейство микроконтроллеров составляющее основу большинства современных контроллеров полёта. Arduino основан на AVR (ATmel), и сообщество, похоже, сосредоточено на MultiWii, как на предпочтительном коде. Microchip является основным производителем чипов PIC. Трудно утверждать, что одно лучше другого, всё сводится к тому, что может делать программное обеспечение. ARM (например, STM32) использует 16/32-битную архитектуру, при этом десятки используют 8/16-битные AVR и PIC. Поскольку одноплатные компьютеры становятся все менее и менее дорогостоящими, ожидается появление полётных контроллеров нового поколения, которые могут работать с полноценными операционными системами, такими как Linux, или Android.
Программная память/Флэш: Флэш-память — это место, где хранится основной код. Если программа сложная, она может занимать много места. Очевидно, что чем больше память, тем больше информации она может хранить. Память также актуальна при хранении данных в полёте, таких как координаты GPS, планы полёта, автоматическое движение камеры и т.д. Код, загруженный на флэш-память, остается на чипе даже после отключения питания.
EEPROM: электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) обычно используется для хранения информации, которая не изменяется во время полёта, например настройки, в отличие от данных, хранящихся на SRAM, к которым могут относиться показания датчика и т.д.
Дополнительные порты Ввода/Вывода: большинство микроконтроллеров имеют большое количество цифровых и аналоговых портов ввода и вывода, на контроллере полёта некоторые используются под датчики, другие для связи, либо для общего ввода и вывода. К этим дополнительным портам могут быть подключены RC сервоприводы, системы подвеса, зуммеры и многое другое.
Питание

Повторим. В идеале не нужно запитывать контроллер полёта отдельно от основной батареи. Единственное исключение — если вам нужна резервная АКБ на случай, когда основная батарея отдаёт столько энергии, что BEC не может вырабатывать достаточно тока/ напряжения, вызывая тем самым отключение питания/сброс. Но, в таком случае вместо резервной батареи часто используют конденсаторы.
Сенсоры
С точки зрения аппаратного обеспечения, контроллер полёта по сути является обычным программируемым микроконтроллером, только со специальными датчиками на борту. Как минимум, контроллер полёта будет включать в себя 3-осевой гироскоп, но без автовыравнивания. Не все контроллеры полёта оснащаются указанными ниже сенсорами, но они также могут включать их комбинацию:
- Гироскоп: Гироскоп измеряет скорость изменения углов по трём угловым осям (назовём их: альфа, бета и гамма). Обычно измеряется в градусах в секунду. Обратите внимание, что гироскоп не измеряет абсолютные углы напрямую, но вы можете выполнить итерацию, чтобы получить угол, который, как и у акселерометра, способствует дрейфу. Выход реального гироскопа имеет тенденцию быть аналоговым или I2C, но в большинстве случаев вам не нужно беспокоиться об этом, так как все поступающие данные обрабатываются кодом контроллера полёта. Гироскоп должен быть установлен так, чтобы его оси вращения совпадали с осями БПЛА.
- Инерционный измерительный блок (IMU): IMU — по сути, это небольшая плата, которая содержит как акселерометр, так и гироскоп (обычно многоосевые). Большинство из них включают трёхосевой акселерометр и трёхосевой гироскоп, другие могут включать дополнительные сенсоры, например трёхосевой магнитометр, обеспечивающий в общей сложности 9 осей измерения.
- Компас/Магнитометр: Электронный магнитный компас способный определять магнитное поле Земли и использовать эти данные для определения направления компаса беспилотника (относительно северного магнитного полюса). Этот сенсор почти всегда присутствует, если система имеет GPS вход и доступно от одной до трех осей.
- Давление/Барометр: Так как атмосферное давление изменяется по мере удаления от уровня моря, можно использовать сенсор давления, чтобы получить довольно точные показания высоты БПЛА. Для расчёта максимально точной высоты, большинство контроллеров полёта получают данные одновременно от сенсора давления и спутниковой системы навигации (GPS). При сборке обратите внимание, что предпочтительнее, чтобы отверстие в корпусе барометра было накрыто куском поролона, это уменьшить отрицательное влияние ветра на чип.
- Расстояние: Датчики расстояния все чаще используются на беспилотниках, поскольку GPS-координаты и датчики давления не могут рассказать вам, насколько далеко вы находитесь от земли (холма, горы или здания), либо столкнётесь ли вы с объектом или нет. Датчик расстояния, обращенный вниз, может быть основан на ультразвуковой, лазерной или лидарной технологии (ИК-сенсоры могут испытывать проблемы в работе при солнечном свете). Датчики расстояния редко входят в стандартный комплект полётного контроллера.
Режимы полёта
- ACRO — обычно режим по умолчанию, из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп (беспилотник не может автоматически выравниваться). Актуален для спортивного (акробатического) полёта.
- ANGLE — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп и акселерометр. Углы ограничены. Будет удерживать беспилотник в горизонтальном положении (но без удержания позиции).
- BARO (Altitude Hold) — стабильный режим; из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и барометр. Углы ограничены. Барометр используется для удержания определенной (фиксированной) высоты, когда с аппаратуры управления не подаются никакие команды.
- MAG (Heading Hold) — режим блокировки курса (направления компаса), беспилотник будет сохранять Yaw ориентацию. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- HEADFREE (CareFree, Headless, Безголовый) — исключает отслеживание ориентации (Yaw) дрона и тем самым позволяет перемещаться в 2D направлении согласно перемещению стика управления ROLL/PITCH. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр и компас.
- GPS/Return to Home — автоматически использует компас и GPS, чтобы вернуться к месту взлёта. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Waypoint — позволяет беспилотнику автономно следовать по предварительно установленным GPS точкам. Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- GPS/Position Hold — удерживает текущую позицию с помощью GPS и барометра (если доступен). Из всех имеющихся сенсоров, контроллером полёта задействуются гироскоп, акселерометр, компас, и модуль GPS.
- Failsafe (аварийный/отказоустойчивый режим) — если другие режимы полёта заданы не были, беспилотник переходит в режим Acro. Из всех имеющихся сенсоров, контроллером полёта задействуется только гироскоп. Актуален при сбоях в программном обеспечении беспилотника, позволяет восстановить контроль над БЛА посредством ранее предустановленных команд.
Программное обеспечение

ПИД-регулятор (назначение и настройка)
Proportional Integral Derivate (PID) или Пропорционально-интегрально-дифференцирующий регулятор (ПИД) — часть программного обеспечения полётного контроллера, которое считывает данные с сенсоров и вычисляет, как быстро должны вращаться моторы, чтобы сохранить желаемую скорость перемещения БЛА.
Разработчики готовых к полёту БЛА как правило оптимально настраивают параметры ПИД-регулятора, поэтому большинство RTF беспилотников отлично пилотируются прямо из коробки. Чего не скажешь про кастомные сборки БЛА, где актуально использование универсального полётного контроллера подходящего для любой мультироторной сборки, с возможностью регулировки значений PID до тех пор, пока они не будут соответствовать требуемым характеристикам полёта конечного пользователя.

GUI
Graphical User Interface (GUI) или Графический интерфейс пользователя — это то, что используется для визуального редактирования кода (при помощи компьютера), который будет загружен в полётный контроллер. Программное обеспечение, поставляемое с контроллерами полёта, продолжает становиться все лучше и лучше; первые контроллеры полёта использовали в основном текстовые интерфейсы, которые требовали, чтобы пользователи понимали почти весь код и меняли определенные разделы в соответствии с проектом. В последнее время в GUI применяются интерактивные графические интерфейсы, с целью облегчить пользователю настройку необходимых параметров.
Связь
-
(взлёт и снижение) (вращение вокруг своей оси влево и вправо) (движение вперёд и назад) (движение влево и вправо)
- Арминг (Arming или Arm)/Дизарминг (Disarming или Disarm) — постановка/снятие с охраны моторов.
- Управление подвесом (панорамирование вверх/вниз, вращение по часовой стрелке/против часовой стрелки, зуммирование)
- Смена режимов полёта (ACRO/ANGLE и т.д.)
- Активировать/Задействовать полезную нагрузку (парашют, зуммер или другое устройство)
- Любое другое применение
- Не все RC передатчики могут обеспечить полный диапазон RC сигналов от 500мс до 2500мс; некоторые искусственно ограничивают этот диапазон, так как большинство используемых RC предназначены для радиоуправляемых автомобилей, самолётов и вертолётов.
- Дальность/Макс. воздушный радиус действия (измеряется в футах или метрах) RC-системы — практически никогда не предоставляются производителями, поскольку на этот параметр влияют множество факторов, таких как помехи, температура, влажность, заряд батареи и другие.
- Некоторые RC-системы имеют приёмник, который также имеет встроенный передатчик для передачи данных от датчика (например, GPS-координат), которые в последствии будут отображаться на ЖК-дисплее RC передатчика.

Bluetooth
Bluetooth и более поздние продукты BLE (Bluetooth Low Energy) изначально предназначались для передачи данных между устройствами без заморочек сопряжения или согласования частот. Некоторые имеющиеся на рынке контроллеры полёта могут отправлять и получать данные по беспроводной связи через соединение Bluetooth, что упрощает поиск неисправностей в полевых условиях.
Wi-Fi
Управление по Wi-Fi обычно достигается посредством Wi-Fi роутера, компьютера (в том числе ноутбук, десктоп, планшет) или смартфон. Wi-Fi в состоянии справится как с передачей данных, так и с передачей видеопотока, но одновременно с этим эту технологию сложнее настроить/реализовать. Как и для всех Wi-Fi устройств, расстояние удаления ограничено Wi-Fi передатчиком.
Смартфон
Хоть это и не тип связи, самого вопроса, как управлять дроном используя смартфон, достаточно, чтобы уделить ему отдельный раздел. Современные смартфоны это по сути мощные компьютеры, которые по случайному совпадению могут также совершать телефонные звонки. Почти все смартфоны имеют встроенный модуль Bluetooth, а также модуль WiFi, каждый из которых используется для управления дроном и/или получения данных и/или видео.

Инфракрасное излучение (Infrared (IR))
Инфракрасная связь (то что можно найти в каждом телевизионном пульте дистанционного управления) редко используется для управления дронами, так как даже в обычных комнатах (не говоря уже об открытом пространстве) присутствует так много инфракрасных помех, что они не очень надёжны. Несмотря на то, что технологию можно использовать для управления БПЛА, не может быть предложена как основной вариант.
Дополнительные соображения
Функциональность: Производители полётных контроллеров, обычно, стараются предоставить как можно больше функций — либо включены по умолчанию, либо приобретаются отдельно в качестве опций/дополнений. Ниже приведены лишь некоторые из множества дополнительных функций, на которые вы, возможно, захотите взглянуть при сравнении контроллеров полёта.
Демпфирование: даже небольшие вибрации в раме, обычно вызываемые несбалансированными несущими винтами и/или моторами, могут быть выявлены встроенным акселерометром, который, в свою очередь, отправит соответствующие сигналы на главный процессор, который предпримет корректирующие действия. Эти незначительные исправления не нужны или не желательны для стабильного полёта, и лучше всего, чтобы контроллер полёта вибрировал как можно меньше. По этой причине между контроллером полёта и рамой часто используются виброгасители/демпферы.
Корпус: защитный корпус вокруг контроллера полёта может помочь в различных ситуациях. Помимо того, что корпус выглядит более эстетично, чем голая печатная плата, корпус часто обеспечивает некоторый уровень защиты элект. элементов, а также дополнительную защиту в случае краша.
- Четыре отверстия на расстоянии 30.5мм или 45мм друг от друга в квадрате.
- Плоская нижняя часть для использования с наклейкой.
- Четыре отверстия в прямоугольнике (стандарт не установлен).
Сообщество: поскольку вы создаете кастомный дрон, участие в онлайн-сообществе может значительно помочь, особенно, если вы столкнулись с проблемами или хотите получить совет. Получение рекомендаций от сообщества или просмотр отзывов пользователей, касательно качества и простоты использования различных контроллеров полёта, может также быть полезным.
Аксессуары: Для полноценного использования продукта, помимо самого контроллера полёта, могут потребоваться сопутствующие элементы (аксессуары или опции). Такие аксессуары могут включать, но не ограничиваются ими: модуль GPS и/или GPS антенна; кабели; монтажные принадлежности; экран (LCD/OLED);
Пример
Итак, учитывая все эти различные сравнительные характеристики, какую информацию вы можете получить о контроллере полёта и что может включать контроллер полета? В качестве примера мы выбрали Quadrino Nano Flight Controller.
Главный процессор
Сенсоры

Quadrino Nano включает микросхему MPU9150 IMU, которая включает в себя 3-осевой гироскоп, 3-осевой акселерометр и 3-осевой магнитометр. Это помогает сделать плату достаточно маленькой, не жертвуя качеством датчика. Барометр MS5611 предоставляет данные о давлении и покрыт кусочком пены. Интегрированный Venus 838FLPx GPS с внешней GPS антенной (в комплекте).
Программное обеспечение

Quadrino Nano был создан специально для использования новейшего программного обеспечения MultiWii (на базе Arduino). Вместо того, чтобы изменять код Arduino напрямую, было создано отдельное, более графическое программное обеспечение.
Читайте также: